
A Model-Based Sensor Fault Diagnosis Scheme for Batteries in Electric Vehicles


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- ·
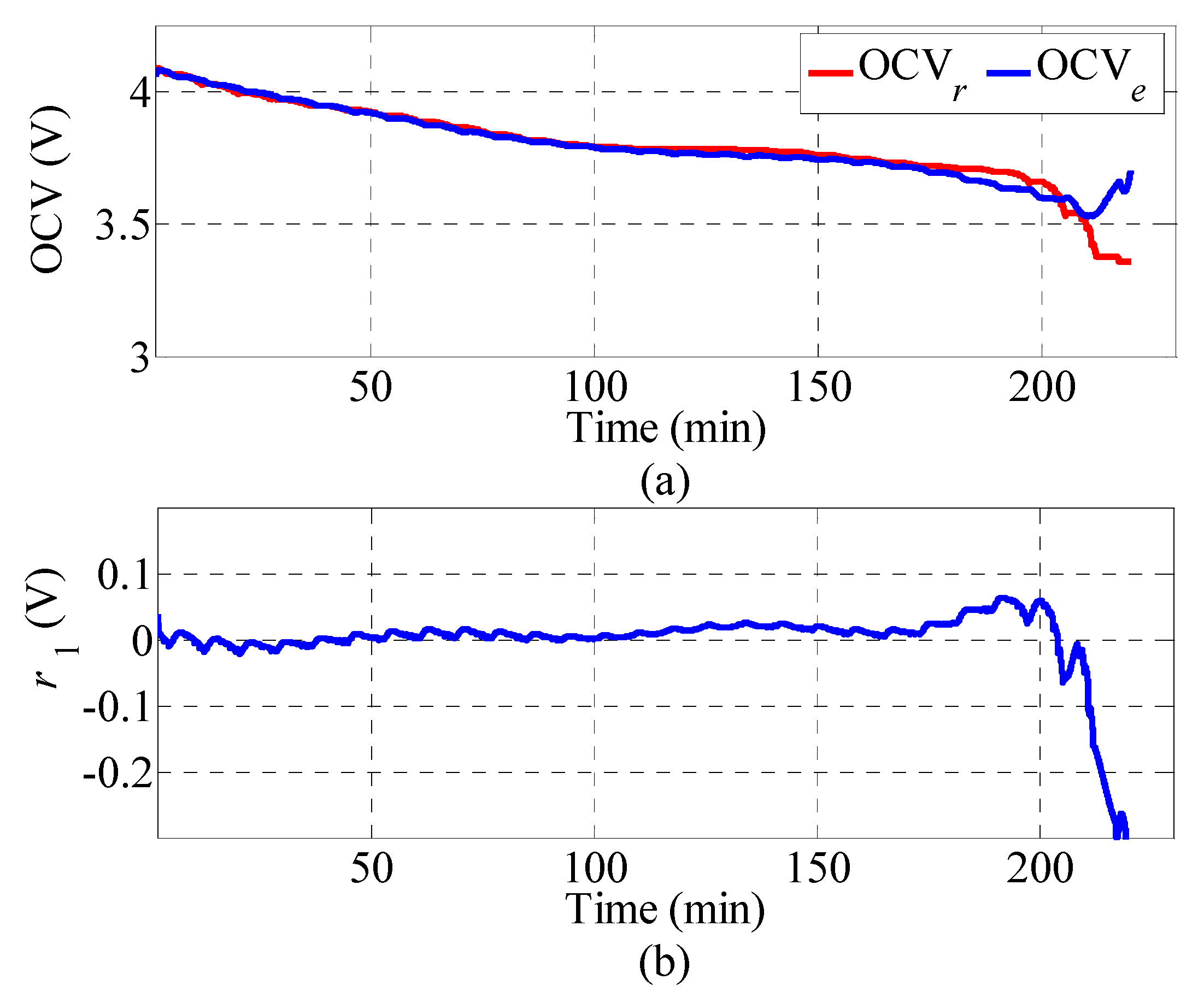
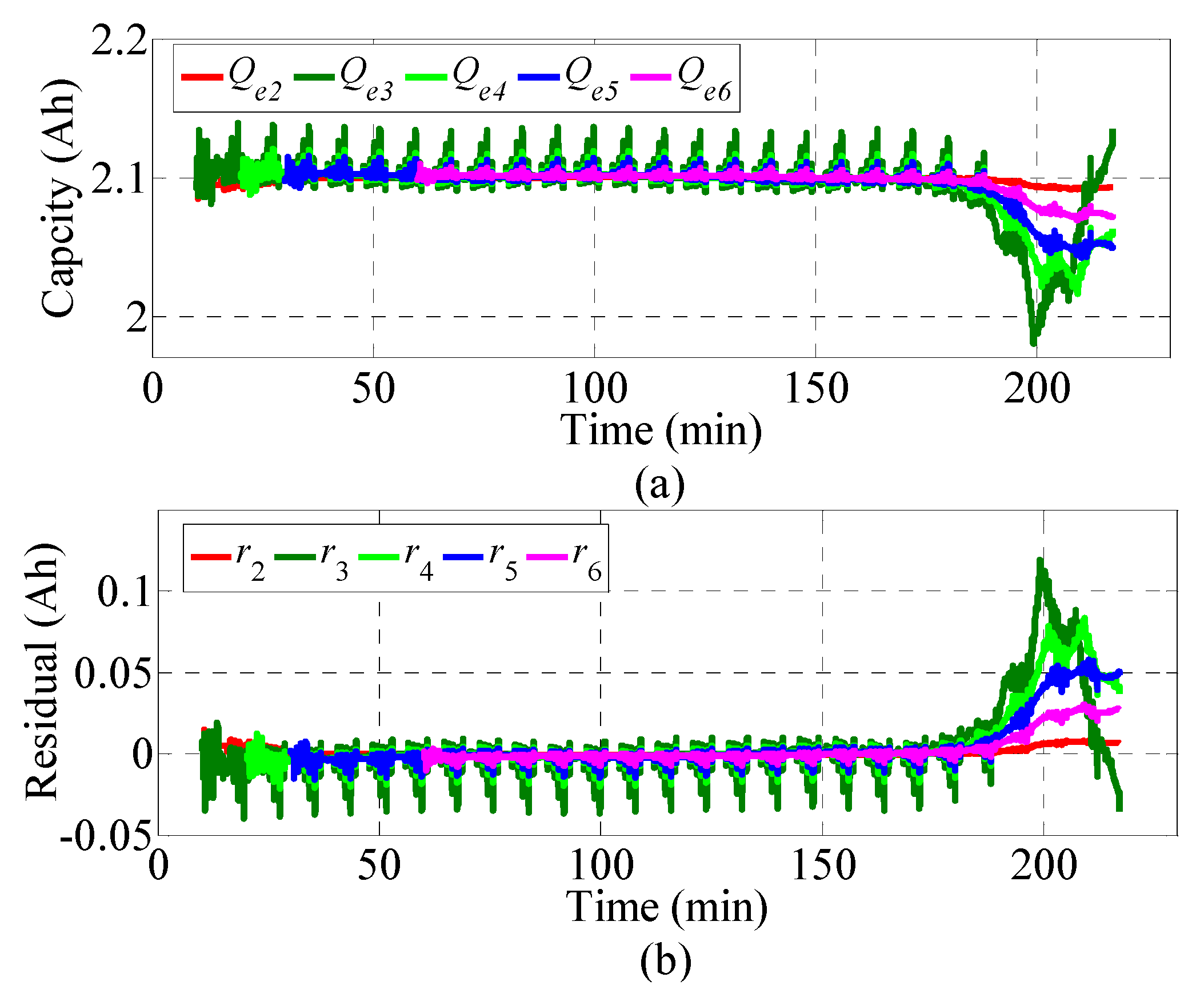
- A model-based sensor fault diagnosis method with parameter residual and state residuals is proposed. The estimation error of the battery static characteristic parameter, i.e., the open-circuit voltage (OCV), is used as a residual for sensor fault diagnosis, which only has a good effect in the beginning and middle stages of the charging and discharging process. The estimated capacity derived from the ratio of the accumulated charge to the SOC difference at various nonadjacent sampling times is used to generate state residuals to detect the sensor fault. These residuals are only suitable for sensor fault diagnosis in the middle and late stages of the charging and discharging process. In view of the different application intervals of the two residuals, a sensor fault diagnosis scheme with two kinds of residuals is proposed.
- ·
- A fault identification and fault-tolerant control strategy is proposed. The fault values of the voltage sensor and current sensor are derived based on the OCV residual and the capacity residual respectively. Then, the fault value is applied to the parameter identification and state estimation of the battery for fault-tolerant control to ensure the safety of the battery.
2. Battery Model
3. Sensor Fault Detection
3.1. Residual Generator 1
3.2. Residual Generator 2
3.3. Residual Evaluation
4. Sensor Fault-Tolerant Control Strategy
4.1. Voltage Sensor Fault Identification and Tolerant Control
4.2. Current Sensor Fault Identification and Tolerant Control
5. Verification and Discussion
5.1. Experiments
5.2. Sensor Fault Detection
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jaguemont, J.; Boulon, L.; Dube, Y. A comprehensive review of lithium-ion batteries used in hybrid and electric vehicles at cold temperatures. Appl. Energy 2016, 164, 99–114. [Google Scholar] [CrossRef]
- Xing, Y.; Ma, E.W.M.; Tsui, K.-L.; Pecht, M. Battery Management Systems in Electric and Hybrid Vehicles. Energies 2011, 4, 1840–1857. [Google Scholar] [CrossRef]
- Chen, C.; Xiong, R.; Yang, R.; Shen, W.; Sun, F. State-of-charge estimation of lithium-ion battery using an improved neural network model and extended Kalman filter. J. Clean. Prod. 2019, 234, 1153–1164. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, Q.; Lu, J.; Bi, J. Optimization-based method to develop practical driving cycle for application in electric ve-hicle power management: A case study in Shenyang, China. Energy 2019, 186, 115766. [Google Scholar] [CrossRef]
- Xiong, R.; Li, L.; Yu, Q.; Jin, Q.; Yang, R. A set membership theory based parameter and state of charge co-estimation method for all-climate batteries. J. Clean. Prod. 2020, 249, 119380. [Google Scholar] [CrossRef]
- Jiang, Y.; Jiang, J.; Zhang, C.; Zhang, W.; Gao, Y.; Li, N. State of health estimation of second-life LiFePO4 batteries for energy storage applications. J. Clean. Prod. 2018, 205, 754–762. [Google Scholar] [CrossRef]
- Berecibar, M.; Garmendia, M.; Gandiaga, I.; Crego, J.; Villarreal, I. State of health estimation algorithm of LiFePO4 battery packs based on differential voltage curves for battery management system application. Energy 2016, 103, 784–796. [Google Scholar] [CrossRef]
- Yu, Q.; Xiong, R.; Yang, R.; Pecht, M.G. Online capacity estimation for lithium-ion batteries through joint estimation method. Appl. Energy 2019, 255, 113817. [Google Scholar] [CrossRef]
- Abada, S.; Marlair, G.; Lecocq, A.; Petit, M.; Sauvant-Moynot, V.; Huet, F. Safety focused modeling of lithium-ion batteries: A review. J. Power Sources 2016, 306, 178–192. [Google Scholar] [CrossRef]
- Wang, Z.; Hong, J.; Liu, P.; Zhang, L. Voltage fault diagnosis and prognosis of battery systems based on entropy and Z -score for electric vehicles. Appl. Energy 2017, 196, 289–302. [Google Scholar] [CrossRef]
- Feng, X.; He, X.; Lu, L.; Ouyang, M. Analysis on the Fault Features for Internal Short Circuit Detection Using an Electro-chemical-Thermal Coupled Model. J. Electrochem. Soc. 2018, 165, A155–A167. [Google Scholar] [CrossRef]
- Yang, R.; Xiong, R.; Shen, W.; Lin, X. Extreme Learning Machine Based Thermal Model for Lithium-ion Batteries of Electric Vehicles under External Short Circuit. Engineering 2020. [Google Scholar] [CrossRef]
- Xia, B.; Shang, Y.; Nguyen, T.; Mi, C. External Short Circuit Fault Diagnosis Based on Supervised Statistical Learning. In 2017 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific); IEEE: Piscataway, NJ, USA, 2017; pp. 1–5. [Google Scholar]
- Feng, X.; Weng, C.; Ouyang, M.; Sun, J. Online internal short circuit detection for a large format lithium ion battery. Appl. Energy 2016, 161, 168–180. [Google Scholar] [CrossRef] [Green Version]
- Xiong, Q.; Yu, L.Y. Open circuit voltage and state of charge online estimation for lithium ion batteries. Energy Procedia 2017, 142, 1902–1907. [Google Scholar] [CrossRef]
- Ouyang, M.; Feng, X.; Han, X.; Lu, L.; Li, Z.; He, X. A dynamic capacity degradation model and its applications considering varying load for a large format Li-ion battery. Appl. Energy 2016, 165, 48–59. [Google Scholar] [CrossRef] [Green Version]
- Sahraei, E.; Campbell, J.C.; Wierzbicki, T. Modeling and short circuit detection of 18650 Li-ion cells under mechanical abuse conditions. J. Power Sources 2012, 220, 360–372. [Google Scholar] [CrossRef]
- Lin, X.; Stefanopoulou, A.G. Analytic Bound on Accuracy of Battery State and Parameter Estimation. J. Electrochem. Soc. 2015, 162, A1879–A1891. [Google Scholar] [CrossRef] [Green Version]
- Xia, B.; Mi, C. A fault-tolerant voltage measurement method for series connected battery packs. J. Power Sources 2016, 308, 83–96. [Google Scholar] [CrossRef]
- Venkatasubramanian, V.; Rengaswamy, R.; Yin, K.; Kavuri, S.N. A review of process fault detection and diagnosis. Comput. Chem. Eng. 2003, 27, 293–311. [Google Scholar] [CrossRef]
- Xiong, R.; Yu, Q.; Shen, W. Review on sensors fault diagnosis and fault-tolerant techniques for lithium ion batteries in electric vehicles. In Proceedings of the 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), Wuhan, China, 31 May–2 June 2018. [Google Scholar]
- Zheng, C.; Chen, Z.; Huang, D. Fault diagnosis of voltage sensor and current sensor for lithium-ion battery pack using hy-brid system modeling and unscented particle filter. Energy 2020, 191, 116504. [Google Scholar] [CrossRef]
- Liu, Z.; He, H. Model-based Sensor Fault Diagnosis of a Lithium-ion Battery in Electric Vehicles. Energies 2015, 8, 6509–6527. [Google Scholar] [CrossRef]
- Liu, Z.; He, H. Sensor fault detection and isolation for a lithium-ion battery pack in electric vehicles using adaptive ex-tended Kalman filter. Appl. Energy 2017, 185, 2033–2044. [Google Scholar] [CrossRef]
- Dey, S.; Mohon, S.; Pisu, P.; Ayalew, B. Sensor Fault Detection, Isolation, and Estimation in Lithium-Ion Batteries. IEEE Trans. Control. Syst. Technol. 2016, 24, 2141–2149. [Google Scholar] [CrossRef]
- Biron, Z.A.; Pisu, P.; Ayalew, B. Observer-Based Diagnostic Scheme for Lithium-Ion Batteries. In Proceedings of the ASME 2015 Dynamic Systems and Control Conference, Columbus, OH, USA, 28–30 October 2015. [Google Scholar]
- Ablay, G. An Observer-Based Fault Diagnosis in Battery Systems of Hybrid Vehicles. In Proceedings of the 2013 8th International Conference on Electrical and Electronics Engineering (ELECO), San Francisco, CA, USA, 18–19 May 2013; IEEE: Piscataway, NJ, USA, 2013; Volume 2013, pp. 238–242. [Google Scholar]
- Couto, L.D.; Kinnaert, M. Internal and Sensor Fault Detection and Isolation for Li-ion Batteries. IFAC-PapersOnLine 2018, 51, 1431–1438. [Google Scholar] [CrossRef]
- Yu, Q.; Xiong, R.; Lin, C. Model-Based Sensor Fault Detection for Lithium-Ion Batteries in Electric Vehicles. In 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring); Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2019; pp. 1–4. [Google Scholar]
- Xu, J.; Wang, J.; Li, S.; Cao, B. A Method to Simultaneously Detect the Current Sensor Fault and Estimate the State of Energy for Batteries in Electric Vehicles. Sensors 2016, 16, 1328. [Google Scholar] [CrossRef] [Green Version]
- Xiong, R.; Yu, Q.; Shen, W.; Lin, C.; Sun, F. A Sensor Fault Diagnosis Method for a Lithium-Ion Battery Pack in Electric Vehi-cles. IEEE Trans. Power Electron. 2019, 34, 9709–9718. [Google Scholar] [CrossRef]
- Karimi, S.; Gaillard, A.; Poure, P.; Saadate, S. Current Sensor Fault-Tolerant Control for WECS with DFIG. IEEE Trans. Ind. Electron. 2009, 56, 4660–4670. [Google Scholar] [CrossRef]
- Bianchi, F.D.; Ocampo-Martinez, C.; Kunusch, C.; Sánchez-Peña, R.S. Fault-tolerant unfalsified control for PEM fuel cell sys-tems. IEEE Trans. Energy Convers. 2015, 30, 307–315. [Google Scholar] [CrossRef] [Green Version]
- Zhao, S.; Duncan, S.R.; Howey, D.A. Observability Analysis and State Estimation of Lithium-Ion Batteries in the Presence of Sensor Biases. IEEE Trans. Control. Syst. Technol. 2016, 25, 326–333. [Google Scholar] [CrossRef] [Green Version]
- Xiong, R.; Yu, Q.; Wang, L.Y.; Lin, C. A novel method to obtain the open circuit voltage for the state of charge of lithium ion batteries in electric vehicles by using H infinity filter. Appl. Energy 2017, 207, 346–353. [Google Scholar] [CrossRef]
- Yu, Q.-Q.; Xiong, R.; Wang, L.-Y.; Lin, C. A Comparative Study on Open Circuit Voltage Models for Lithium-ion Batteries. Chin. J. Mech. Eng. 2018, 31, 65. [Google Scholar] [CrossRef] [Green Version]
- Hu, X.; Sun, F.; Zou, Y.; Peng, H. Online estimation of an electric vehicle Lithium-Ion battery using recursive least squares with forgetting. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011. [Google Scholar]
- Yu, Q.; Xiong, R.; Lin, C.; Shen, W.; Deng, J. Lithium-Ion Battery Parameters and State-of-Charge Joint Estimation Based on H-Infinity and Unscented Kalman Filters. IEEE Trans. Veh. Technol. 2017, 66, 8693–8701. [Google Scholar] [CrossRef]
- Li, Z.; Xiong, R.; Mu, H.; He, H.; Wang, C. A novel parameter and state-of-charge determining method of lithium-ion battery for electric vehicles. Appl. Energy 2017, 207, 363–371. [Google Scholar] [CrossRef]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Q.; Wan, C.; Li, J.; Xiong, R.; Chen, Z. A Model-Based Sensor Fault Diagnosis Scheme for Batteries in Electric Vehicles. Energies 2021, 14, 829. https://doi.org/10.3390/en14040829
Yu Q, Wan C, Li J, Xiong R, Chen Z. A Model-Based Sensor Fault Diagnosis Scheme for Batteries in Electric Vehicles. Energies. 2021; 14(4):829. https://doi.org/10.3390/en14040829
Chicago/Turabian StyleYu, Quanqing, Changjiang Wan, Junfu Li, Rui Xiong, and Zeyu Chen. 2021. "A Model-Based Sensor Fault Diagnosis Scheme for Batteries in Electric Vehicles" Energies 14, no. 4: 829. https://doi.org/10.3390/en14040829