
DEAP Actuator Composed of a Soft Pneumatic Spring Bias with Pressure Signal Sensing


Abstract
:1. Introduction
2. The Concept of Soft Pneumatic Spring Bias
FEM Model
3. Results
3.1. The Soft Pneumatic Spring Bias
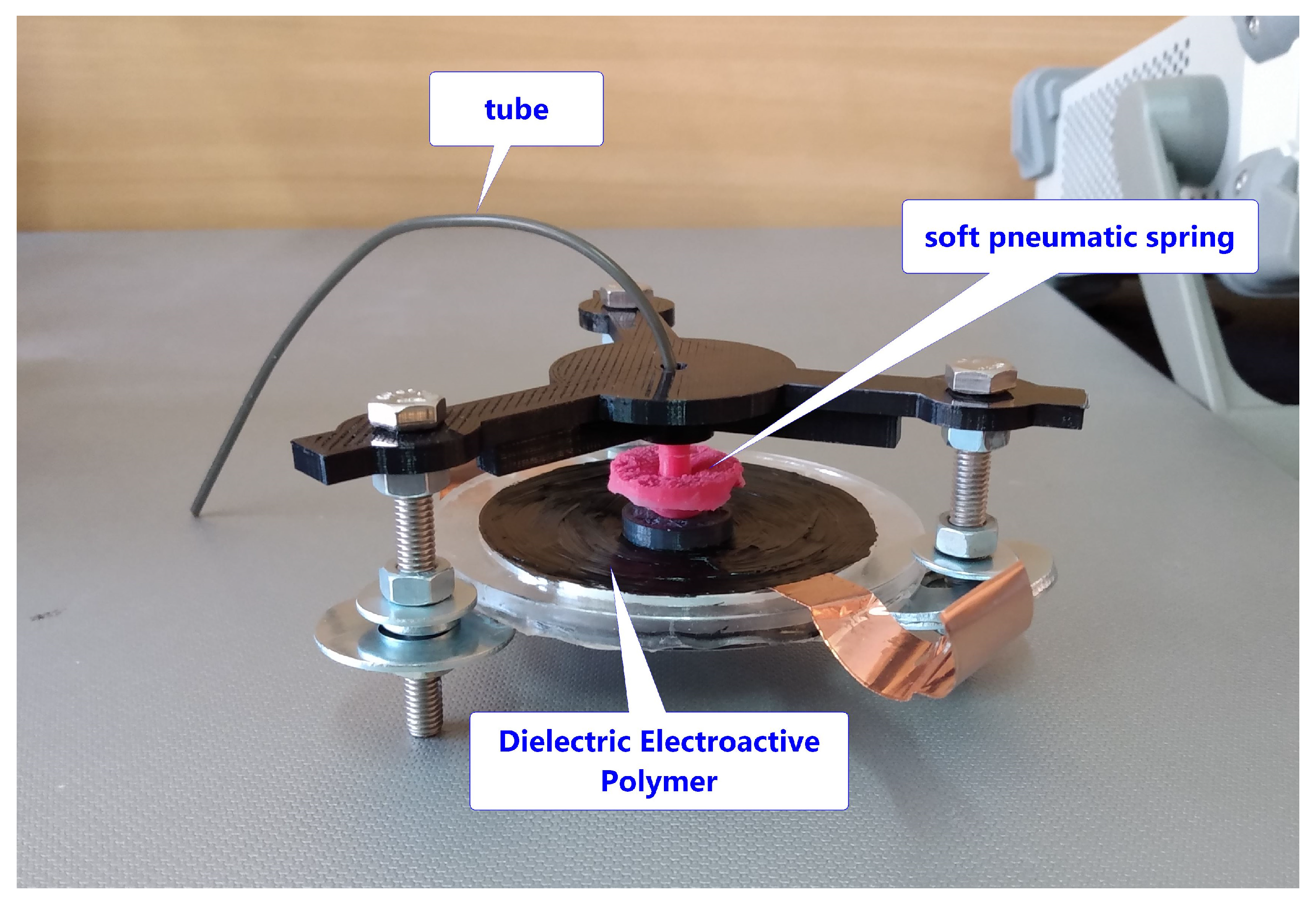
3.2. DEAP Actuator
4. Conclusions
5. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, K.; Tadokoro, S. Electroactive Polymers for Robotic Applications: Artificial Muscles and Sensors; Springe: London, UK, 2007; pp. 1–281. [Google Scholar] [CrossRef]
- Rizzello, G.; Naso, D.; York, A.; Seelecke, S. Modeling, Identification, and Control of a Dielectric Electro-Active Polymer Positioning System. IEEE Trans. Control Syst. Technol. 2015, 23, 632–643. [Google Scholar] [CrossRef]
- Mazzolai, B.; Mattoli, V. Robotics: Generation soft. Nature 2016, 536, 400–401. [Google Scholar] [CrossRef] [PubMed]
- Rosset, S.; Araromi, O.A.; Schlatter, S.; Shea, H. Fabrication Process of Silicone-based Dielectric Elastomer Actuators. J. Vis. Exp. 2016, 108, 1–13. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Loew, P.; Rizzello, G.; Seelecke, S. A novel biasing mechanism for circular out-of-plane dielectric actuators based on permanent magnets. Mechatronics 2018, 56, 48–57. [Google Scholar] [CrossRef]
- Hau, S.; Rizzello, G.; Seelecke, S. A novel dielectric elastomer membrane actuator concept for high-force applications. Extrem. Mech. Lett. 2018, 23, 24–28. [Google Scholar] [CrossRef]
- Cao, C.; Gao, X.; Conn, A. A Magnetically Coupled Dielectric Elastomer Pump for Soft Robotics. Adv. Mater. Technol. 2019, 4, 1900128. [Google Scholar] [CrossRef]
- Anderson, I.; Gisby, T.; McKay, T.; O’Brien, B.; Calius, E. Multi-functional dielectric elastomer artificial muscles for soft and smart machines. J. Appl. Phys. 2012, 112, 041101. [Google Scholar] [CrossRef]
- Zhang, Z.; Andersen, M. Electronics drivers for high voltage dielectric electro active polymer (DEAP) applications. In Proceedings of the Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 9–12 March 2015; Volume 9430. [Google Scholar] [CrossRef] [Green Version]
- Schlatter, S.; Illenberger, P.; Rosset, S. Peta-pico-Voltron: An open-source high voltage power supply. HardwareX 2018, 4, e00039. [Google Scholar] [CrossRef]
- Sarban, R.; Lassen, B.; Willatzen, M. Dynamic Electromechanical Modeling of Dielectric Elastomer Actuators With Metallic Electrodes. IEEE/ASME Trans. Mechatron. 2012, 17, 960–967. [Google Scholar] [CrossRef]
- Bernat, J.; Kolota, J.; Rosset, S. Identification of a Nonlinear Dielectric Elastomer Actuator Based on the Harmonic Balance Method. IEEE/ASME Trans. Mechatron. 2020. [Google Scholar] [CrossRef]
- Gu, G.Y.; Gupta, U.; Zhu, J.; Zhu, L.M.; Zhu, X. Modeling of Viscoelastic Electromechanical Behavior in a Soft Dielectric Elastomer Actuator. IEEE Trans. Robot. 2017, 33, 1263–1271. [Google Scholar] [CrossRef]
- O’Brien, B.; McKay, T.; Calius, E.; Xie, S.; Anderson, I. Finite element modelling of dielectric elastomer minimum energy structures. Appl. Phys. A Mater. Sci. Process. 2009, 94, 507–514. [Google Scholar] [CrossRef]
- Loew, P.; Rizzello, G.; Simone, F.; Seelecke, S. Finite element simulation of plane strain dielectric elastomer membranes actuated by discretized electrodes. In Proceedings of the Electroactive Polymer Actuators and Devices (EAPAD) XXI, Denver, CO, USA, 4–7 March 2019; Volume 10966, pp. 88–96. [Google Scholar] [CrossRef]
- Cao, C.; Conn, A. Performance optimization of a conical dielectric elastomer actuator. Actuators 2018, 7, 32. [Google Scholar] [CrossRef] [Green Version]
- Hodgins, M.; York, A.; Seelecke, S. Experimental comparison of bias elements for out-of-plane DEAP actuator system. Smart Mater. Struct. 2013, 22, 094016. [Google Scholar] [CrossRef]
- Rizzello, G.; Naso, D.; Turchiano, B.; York, A.; Seelecke, S. LMI-based design of PI controllers for micropositioning dielectric electro-active polymer membranes. In Proceedings of the American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 5509–5514. [Google Scholar] [CrossRef]
- Kolota, J. The FEM model of the pump made of dielectric electroactive polymer membrane. Appl. Sci. 2020, 10, 2283. [Google Scholar] [CrossRef] [Green Version]
- Kaal, W.; Herold, S. Electroactive polymer actuators in dynamic applications. IEEE/ASME Trans. Mechatron. 2011, 16, 24–32. [Google Scholar] [CrossRef]
- Bernat, J.; Kolota, J. Adaptive Observer for State and Load Force Estimation for Dielectric Electro-Active Polymer Actuator. In Proceedings of the 11th IFAC Symposium on Nonlinear Control Systems, Vienna, Austria, 4–6 September 2019; Volume 52, pp. 448–453. [Google Scholar]
- Cao, C.; Gao, X.; Burgess, S.; Conn, A. Power optimization of a conical dielectric elastomer actuator for resonant robotic systems. Extrem. Mech. Lett. 2020, 35, 100619. [Google Scholar] [CrossRef]
- Zhang, X.; Hu, J. Model-Free Adaptive Iterative Learning Control for A Pneumatic Muscle-Driven Robot. In Proceedings of the 2019 IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 March 2019; Volume 134, pp. 2246–2249. [Google Scholar] [CrossRef]
- Zhang, X.; Hu, J. Safety Enhancement of a Pneumatic Artificial Muscle Actuated Robotic Orthosis for Gait Rehabilitation. In Proceedings of the 2019 4th Asia-Pacific Conference on Intelligent Robot Systems (ACIRS), Nagoya, Japan, 13–15 July 2019; Volume 134, pp. 113–117. [Google Scholar] [CrossRef]
- Meththananda, I.; Parker, S.; Patel, M.; Braden, M. The relationship between Shore hardness of elastomeric dental materials and Young’s modulus. Dent. Mater. 2009, 25, 956–959. [Google Scholar] [CrossRef] [PubMed]
- Wissler, M.; Mazza, E. Mechanical behavior of an acrylic elastomer used in dielectric elastomer actuators. Sens. Actuators A Phys. 2007, 134, 494–504. [Google Scholar] [CrossRef]
- He, T.; Cui, L.; Chen, C.; Suo, Z. Nonlinear deformation analysis of a dielectric elastomer membrane–spring system. Smart Mater. Struct. 2010, 19, 085017. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Value | Unit |
|---|---|---|
| Electrode width | 35 | |
| Inner plate radius | 45 | |
| Outer plate radius | 52 | |
| Membrane initial thickness | 1 | |
| Membrane final thickness | 0.18 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bernat, J.; Kołota, J. DEAP Actuator Composed of a Soft Pneumatic Spring Bias with Pressure Signal Sensing. Energies 2021, 14, 1189. https://doi.org/10.3390/en14041189
Bernat J, Kołota J. DEAP Actuator Composed of a Soft Pneumatic Spring Bias with Pressure Signal Sensing. Energies. 2021; 14(4):1189. https://doi.org/10.3390/en14041189
Chicago/Turabian StyleBernat, Jakub, and Jakub Kołota. 2021. "DEAP Actuator Composed of a Soft Pneumatic Spring Bias with Pressure Signal Sensing" Energies 14, no. 4: 1189. https://doi.org/10.3390/en14041189