1. Introduction
Increased flexibility and intelligence in the optimization and control of modern power systems seem to be necessary to maintain a generation–load balance in presence of various disturbances. This issue has become more serious today due to the use of a large number of microgrids (MGs). The MGs often utilize different means to generate electricity, the parameters of which naturally fluctuate. The presence of these uncertainties and fluctuations means that the conventional controllers are not efficient enough to ensure the stability and to provide a proper performance for the different operating conditions in power systems [
1]. Off-the-shelf advanced control toolboxes need further improvements and tuning to demonstrate significant benefits for this type of applications.
Multi-area power network system usually consists of interconnected subsystems or control areas linked by tie-lines or High-Voltage Direct Current (HDVC) links. The individual areas consist of generator or generators responsible for their load and scheduled interchanges with nearby areas [
2]. Load frequency control (LFC) is used in power systems for the maintenance of the load–generation balance. The angular speed of the rotor of the generator is a function of the mismatch between the input mechanical power and the output electrical power [
3]. The LFC allows for the controlled exchange of power to assist in the overall robustness of operation while simultaneously allowing economic power generation [
4]. A load frequency controller is required to ensure some level of control over the net power flow on the tie-lines.
In interconnected power system operation and design, Automatic Generation Control (AGC) is one of the significant control issues these days because of the growing size, emerging renewable energy sources, and complexity of power systems [
5]. AGC performs a significant contribution towards maintaining a generation–load balance with respect to various disturbances. In fact, AGC is utilized to balance the changes in the generation and load to restore frequency at the initial value and to meet tie-line flows. AGC is mainly responsible for power interchange, frequency control, and economic dispatch. In many practical applications, some conventional control approaches have been used for AGC such as PID, PI, and optimal control methods, but these controllers have some limitations including difficulty in dealing with system uncertainties, external disturbances, and the speed of response [
6]. Although some control methods such as robust control [
7], MPC [
8,
9], and PI control [
10] successfully overcome many AGC issues, a key problem is that the uncertainties are not explicitly used in the control design. This issue has been investigated in [
11] by proposing a new optimal controller for AGC in the presence of non-Gaussian wind power uncertainty.
Load Frequency Control (LFC), as an integral part of the power system operation and control, has been proposed to cater for parametric changes or uncertainties in the system and performance improvement of the multi-area power systems [
5]. The LFC is an integral part of the multi-area power systems as it is responsible for the load–generation balance and simultaneously regulating the output power of each generator at preset levels. The LFC is becoming more challenging and significant due to increasing penetration level of renewable energy in power production in modern power systems. This issue and effects of renewable distributed generations, such as photovoltaic stations and wind turbine generator, on LFC has been rarely investigated [
12,
13,
14,
15,
16]. Additionally, many contributions in the literature aimed towards the optimization of LFC for power systems are mostly based on conventional control methods. Usually such controllers does not provide a proper performance with uncertainties and fluctuations caused by renewable distributed generations [
1]. Multiple control schemes have been proposed for the design of an LFC, mainly the proportional and integral (PI) control [
17], proportional integral derivative (PID) control [
18,
19,
20,
21], model predictive control (MPC) [
8,
22,
23], robust MPC [
24] robust control scheme [
25], neural network control method [
26], and sliding mode control scheme [
27,
28,
29]. A decentralized adaptive back-stepping excitation controller has been designed in [
30] for stability enhancement of multi-machine power systems. The adaptive control has been used in [
2] to develop a robust LFC scheme for a multi-area power system with parametric uncertainties. The sliding mode control has been used in [
31] to design a discrete LFC for multi-area power systems with matched and unmatched uncertainties, and a sliding mode load frequency controller (SMLFC) has been designed for a power system with mismatched uncertainty in [
32]. The common problem with sliding mode control is chattering phenomenon due to discontinuous terms, and different approaches have been proposed for its reduction [
33]. The proportional integral derivative (PID) LFC has been designed together with the robust technique in [
34] for multi-machine power systems. However, the generation rate constraint, unmatched uncertainty, and resource variation were not studied in those researches. Furthermore, most of the research only considered a single area power system.
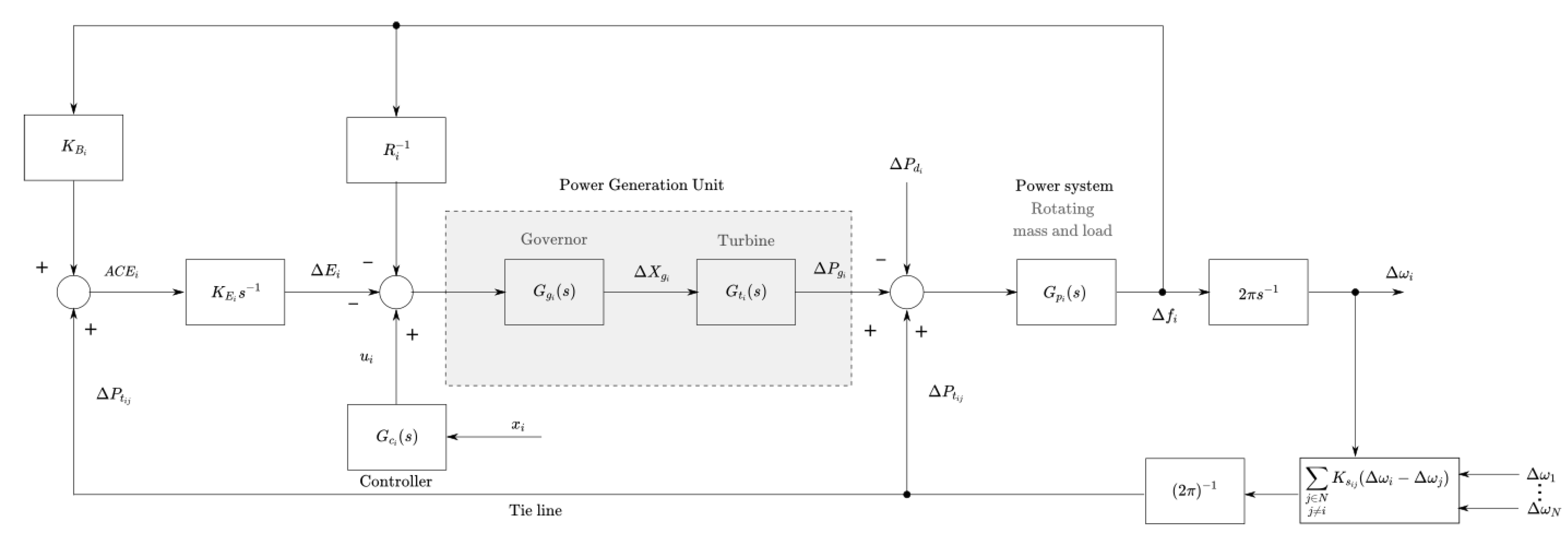
Tie-line Bias control has been utilized as the desired control scheme in North America for the past 75 years. The term Area Control Error (ACE) was introduced in the early 1950s for the specific implementation of coordinated Tie Line Bias control which is now widely used throughout the world. The Balancing Area’s ACE is calculated by AGC from interchange and frequency data. The ACE informs if that the system is in balance or requires some adjustments to generation. The ACE represented in MW comprises the difference between the Balancing Authority Area’s Actual Net Interchange and its Scheduled Net Interchange, plus its Frequency Bias Setting obligation, plus correction for any known meter error. In the Western Interconnection, reporting ACE consists of Automatic Time Error Correction [
35]. Much effort has been made to use the concept of ACE for the LFC in the literature. The concept of ACE based on frequency and tie-power deviation, inadvertent interchange, and time error has been utilized in [
36] to control the battery energy storage system. In [
37], in order for bounding the system frequency within a target range, a concept of ACE has been utilized.
Linear Quadratic Regulator (LQR) is an effective optimal control method based on the selection of feedback gain in a manner to minimize the cost function [
38,
39]. The LQR is an optimal control approach based on a cost function which contains weighting matrices to achieve a desired behaviour [
40]. The LQR is applicable for optimizing multiple input multiple output systems and its properties depend on the appropriate selection of matrix that reflects the weighting on the non-zero penalties on the states and the matrix which corresponds to the weightings on the penalties on process inputs [
41]. The LQR enables stability in systems and it allows for voltage regulation and load sharing simultaneously [
42,
43]. However, the robustness of the LQR control scheme is poor. In [
44], an LQR has been proposed for the inner voltage control loop in an islanded microgrid. A robust control scheme based on LQR-fuzzy logic was designed in [
45,
46] for a single area power system.
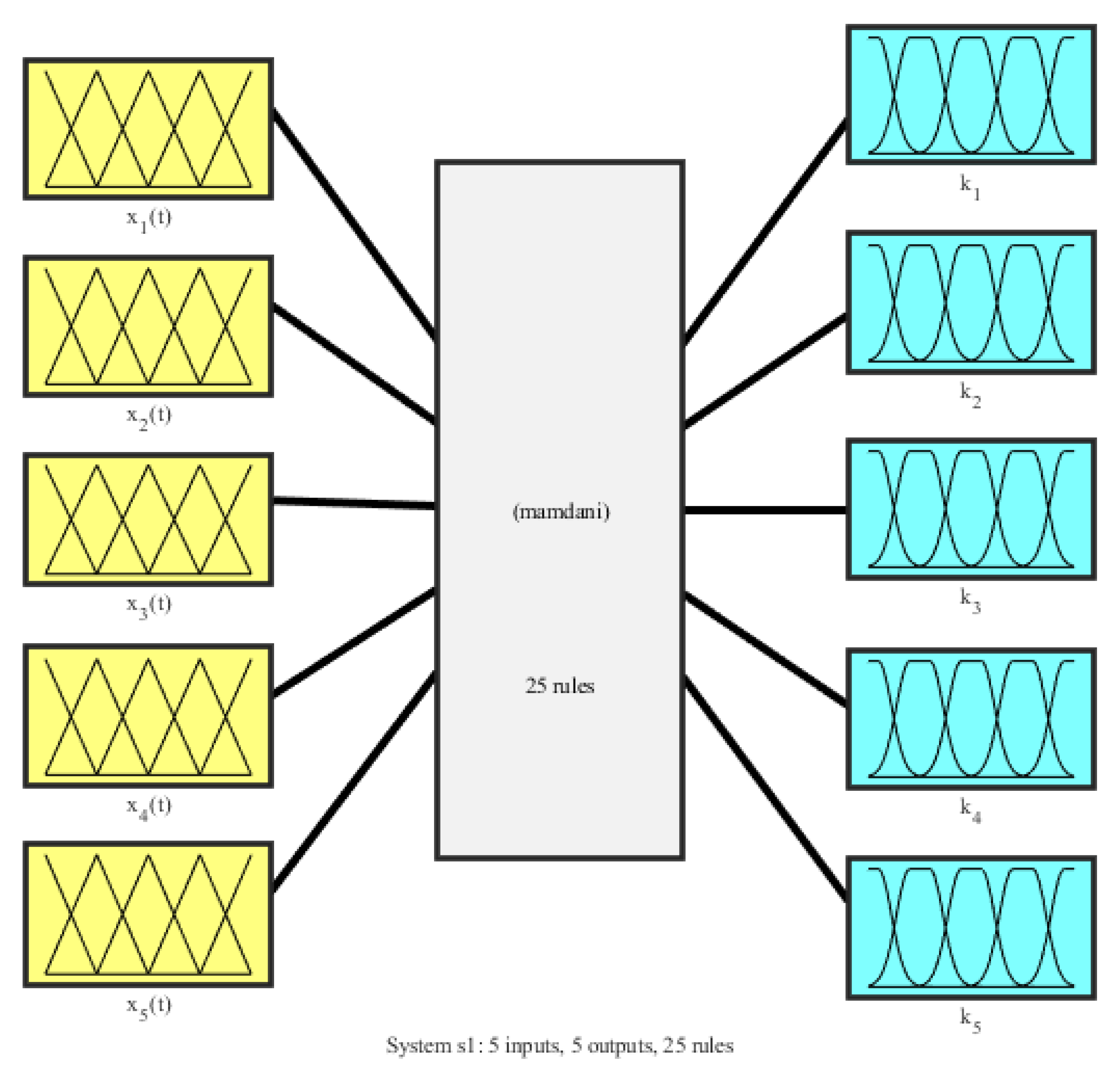
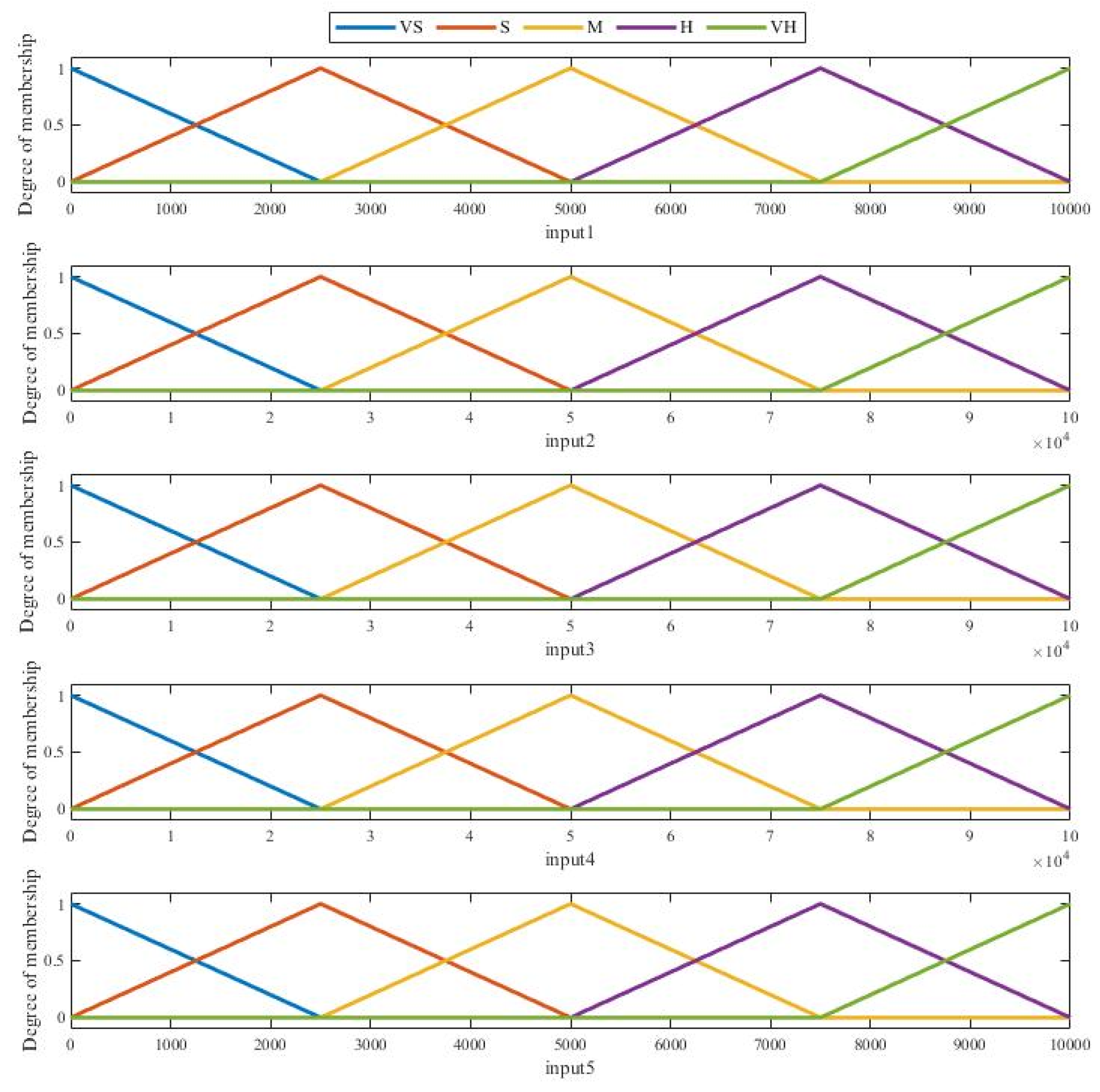
Fuzzy logic, proposed by Lotfi A. Zadeh in 1965 is a model-free approach utilizing linguistic variables to imitate the human operator’s way of thinking [
47]. As the fuzzy logic is a model-free approach, it has no requirement on the model structure or the knowledge of the rules controlling the relationship between the process inputs and outputs of the system [
48]. This makes it suitable for complicated systems whose mathematical models are difficult to establish. Fuzzy logic, however, has the disadvantage of the requirement of a vast information to compensate for system parameter changes or when there is an increase in the number of inputs [
49,
50]. Fuzzy logic integrated with sliding mode control [
51] or back-stepping provides an effective way to increase the robustness of the controller with respect to parametric uncertainties and external disturbances [
52].
Aim of the Paper
The paper aims to analyze and compare the quality of LQR and Fuzzy Logic Controller in three area power distribution systems. While LQR controller for power generation is a relatively well established technique, it relies on knowledge of the model of the system in order to build a state-space representation. On the other hand, the fuzzy control is gaining more interest recently, because it does not require a precise state-space model of the controlled system. Therefore, the idea to compare the two approaches taking into consideration: (i) ease of implementation and tuning of the controller and (ii) robustness of the control to changes in the parameters of the system. To this end, three simulation scenarios have been selected to progressively test both controllers against increasingly difficult control tasks. The first two scenarios test the dynamic responses of the system whereas the third scenario assumes changes in the system model, caused by decoupling of the areas, which are not visible to the controller. The model and the controls strategies have been implemented in the MATLAB software. The implementation is available at the MATLAB file exchange platform [
53]. The performance control strategies is compared using various quality measures.
Fuzzy logic has been integrated with the adaptive control technique to design a LFC for a multi-area power system [
54]. In [
55], fuzzy control has been used to design and implement the energy management system (EMS) for a DC microgrid. In [
56], a generalized droop control (GDC) has been firstly designed to minimize the reactive power and active effects on the frequency and voltage. Then, a fuzzy logic has been employed for tuning the secondary control parameters (PI) and the GDC. The results reveal that the proposed fuzzy logic controllers outperform non-fuzzy control method.
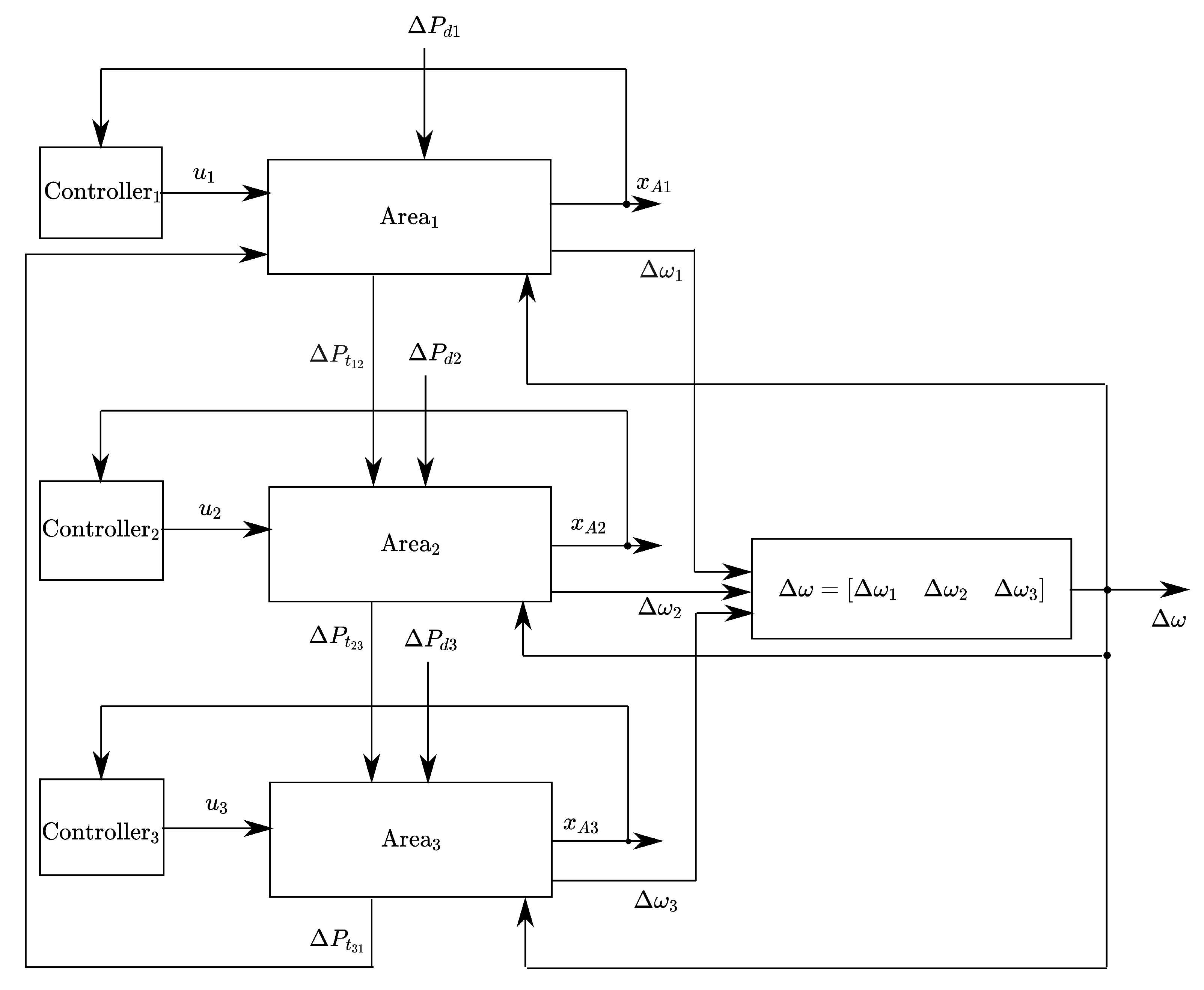
The paper is organized as follows. The first part of the paper describes a general mathematical model of the multi-area generation network and then narrows it down to the model of three coupled areas. Furthermore, it describes the theoretical background of the LQR and the proposed fuzzy controller and explains their implementation for the model of the 3-area network. The Simulation and Results chapter describes simulation scenarios and controller parameters. This is followed by the simulation results presented in graphical and tabular forms. This chapter also contains a comparison of control quality for the algorithms and the scenarios. The Discussion section shows the advantages and disadvantages of methods in terms of stability, accuracy, and robustness. The overall conclusions and discussion of possible directions of future work are provided in the Conclusions section.
4. Discussion
First, we would like to briefly describe the differences, in terms of quality indexes, between control strategies used in this research, for proposed scenarios. Both control algorithms exhibited very good performance in terms of steady-state error, however the dynamics were significantly different.
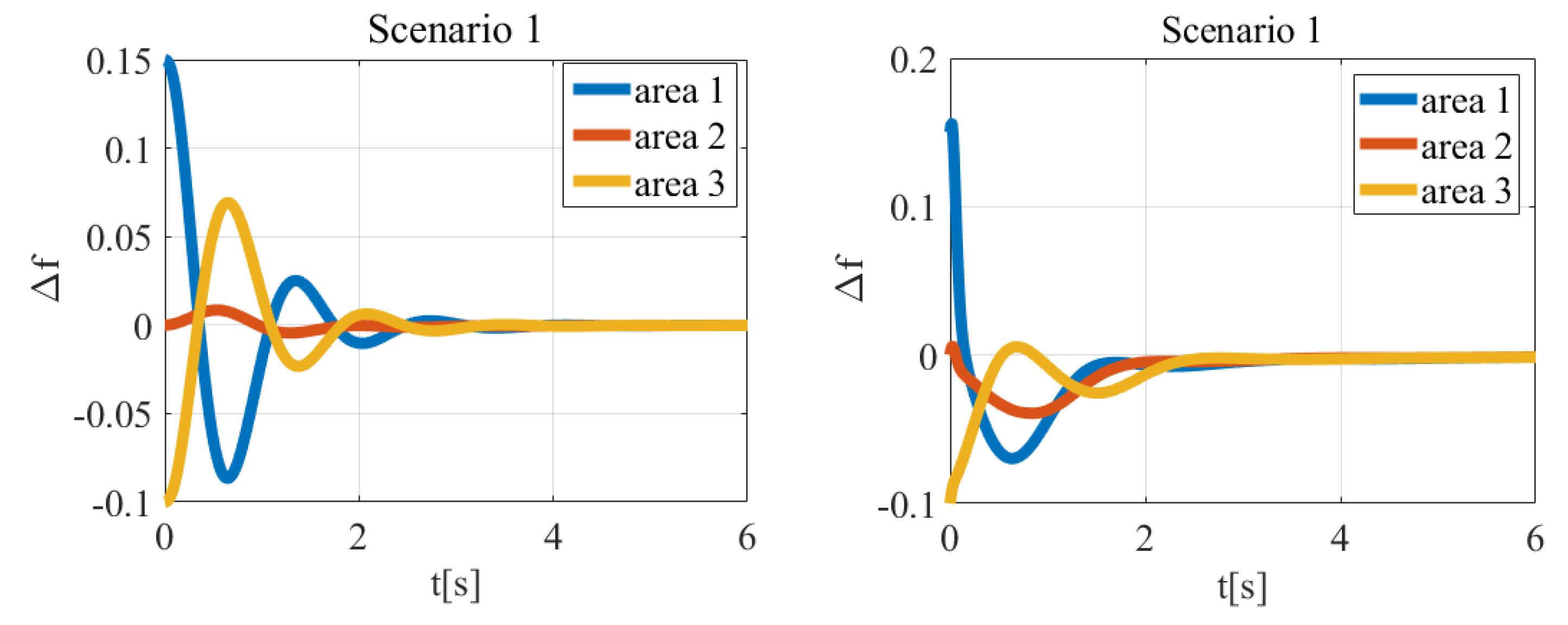
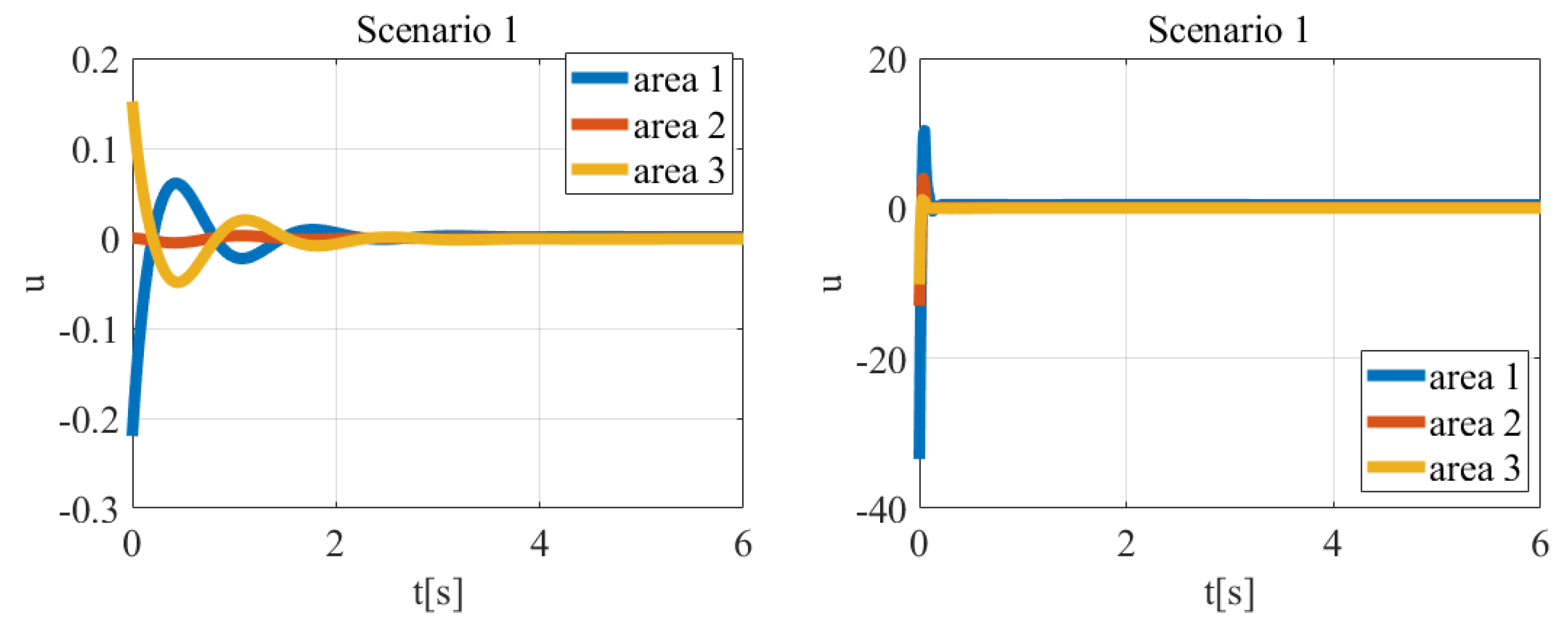
In the first simulation scenario, the system responded to the non-zero initial conditions. In the case of the LQR control strategy, areas 1 and 3 had similar quality indices, while area 2 had the smallest maximum errors, and area 3 had the biggest overshoot. The energy generated by the controller was biggest in area 1 and smallest in area 2 (ISV index). In the case of the FLC control strategy, the quality indexes, and energy generated by the controller, were similar for all areas. In terms of integral indexes (IAE, ITAE, ISV), the LFC control strategy was worse than the LQR strategy—the biggest difference was in case of area 1. Furthermore, in all areas there was visible large overshoot.
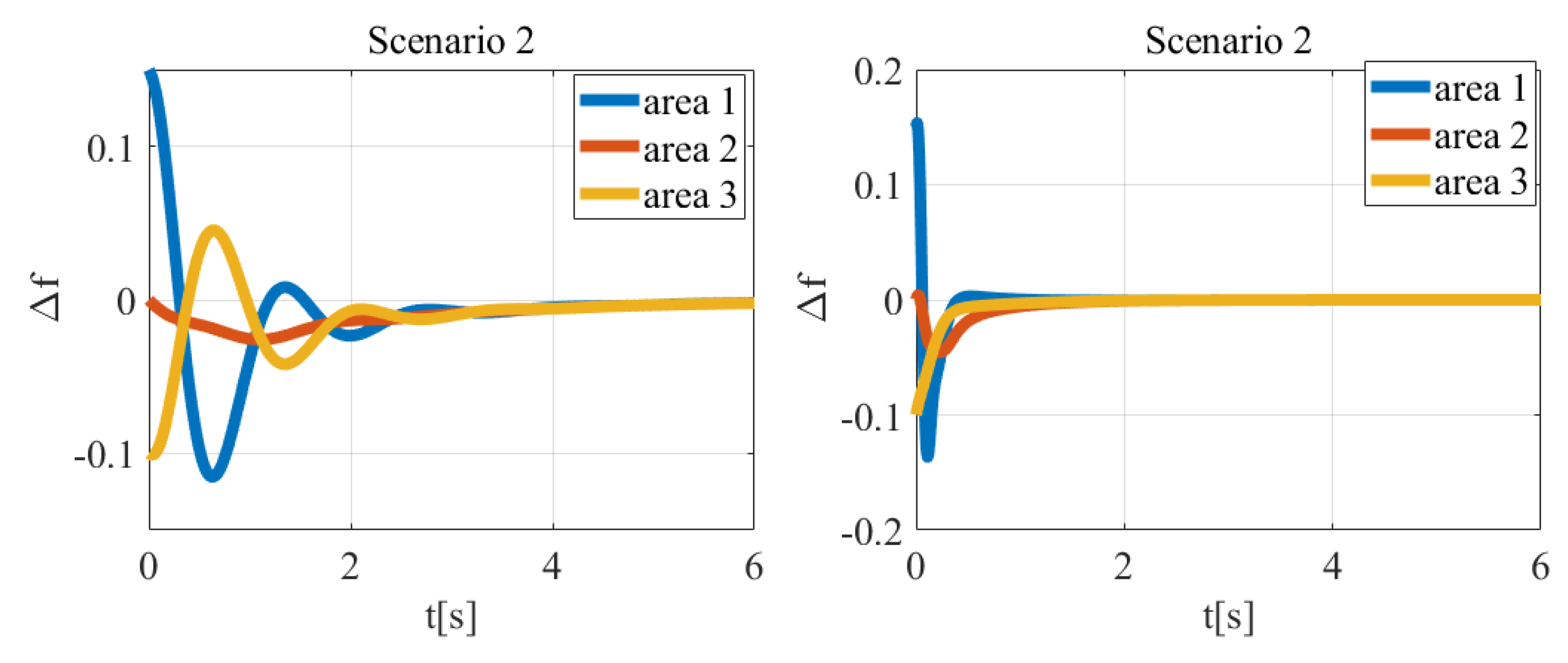
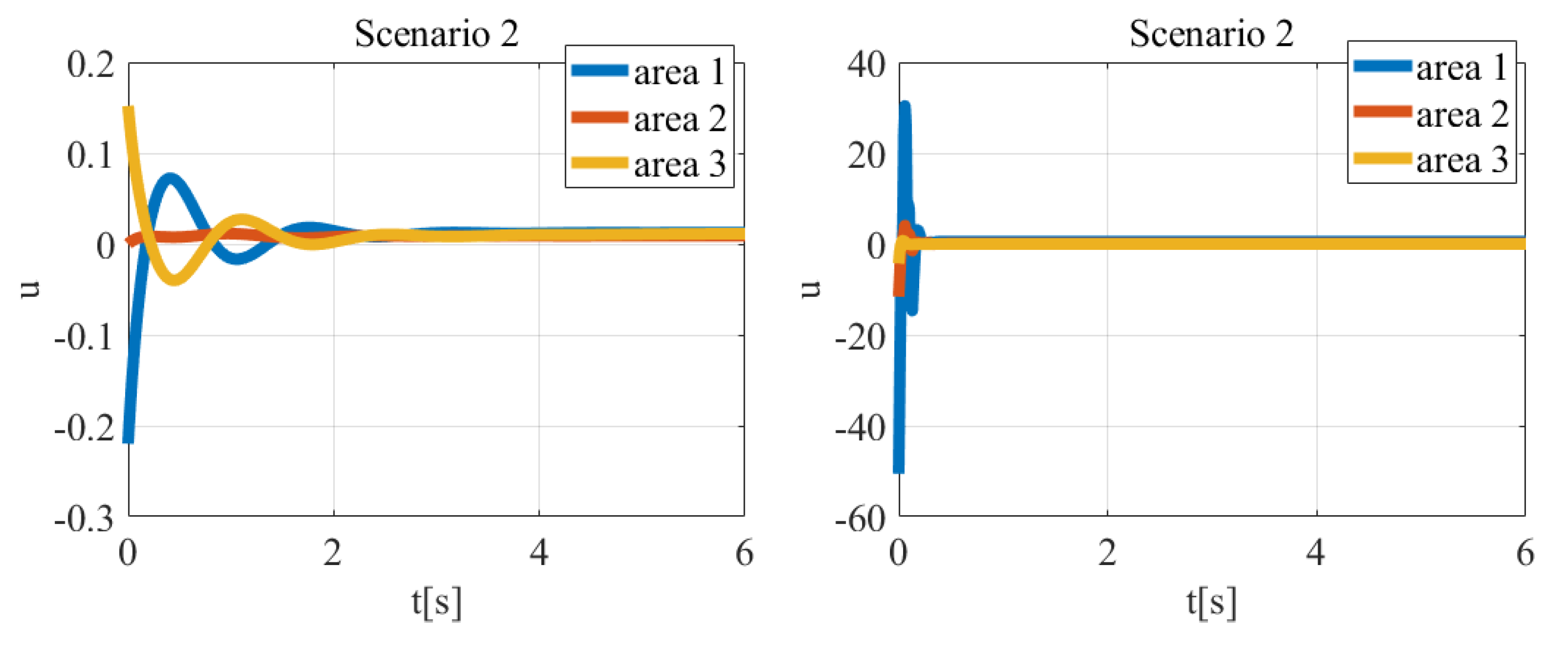
In the second simulation scenario, the system responded to the step-change in the disturbance load. It measures the robustness of the control system to external interferences. In the case of the LQR control strategy, it’s visible that area 2 have a small overshoot, comparing to area 1 and area 3. The energy generated by the controller was biggest in area 3 and smallest in area 1 (ISV index). In the case of the FLC control strategy the quality indexes, and energy generated by the controller, were similar for all areas. In terms of integral indexes (IAE, ITAE), the LFC control strategy was slightly better than the LQR strategy, with significantly worse energy consumption. Furthermore, in all areas there was visible large overshoot.
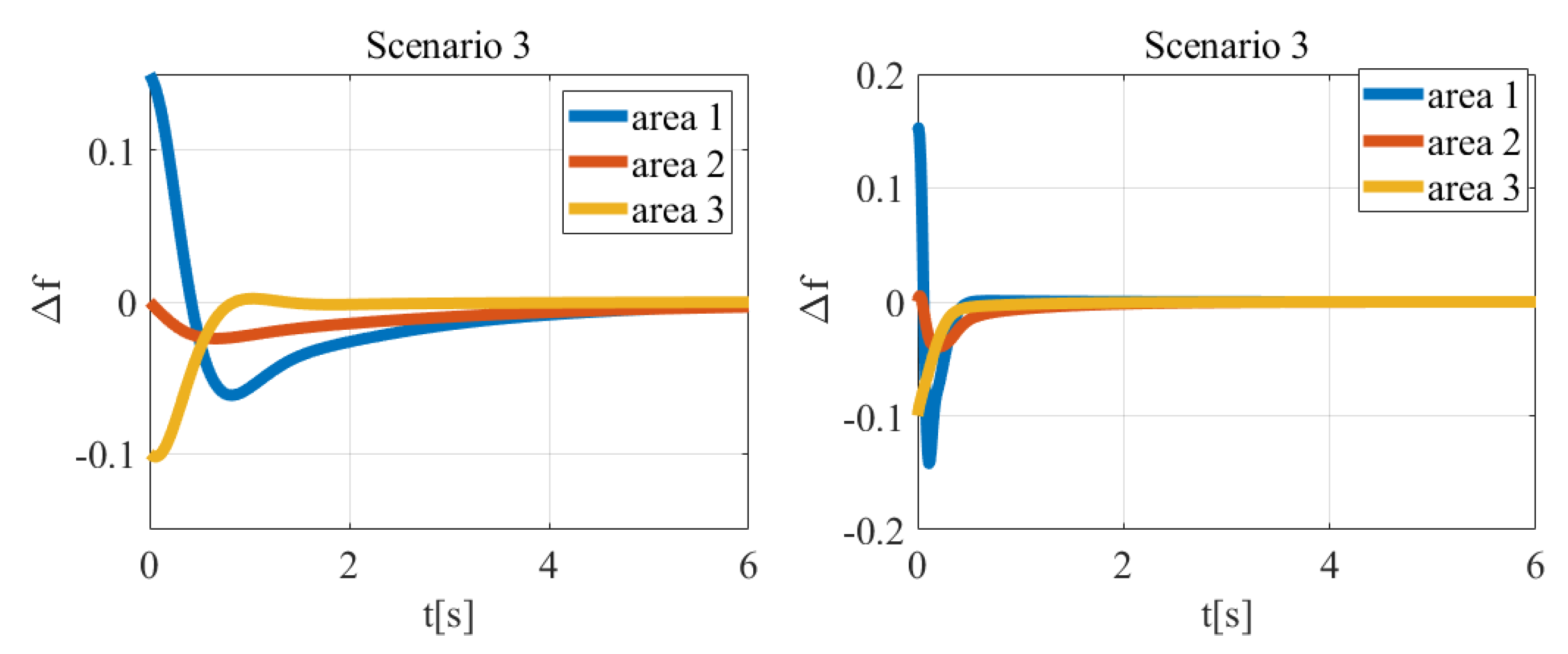
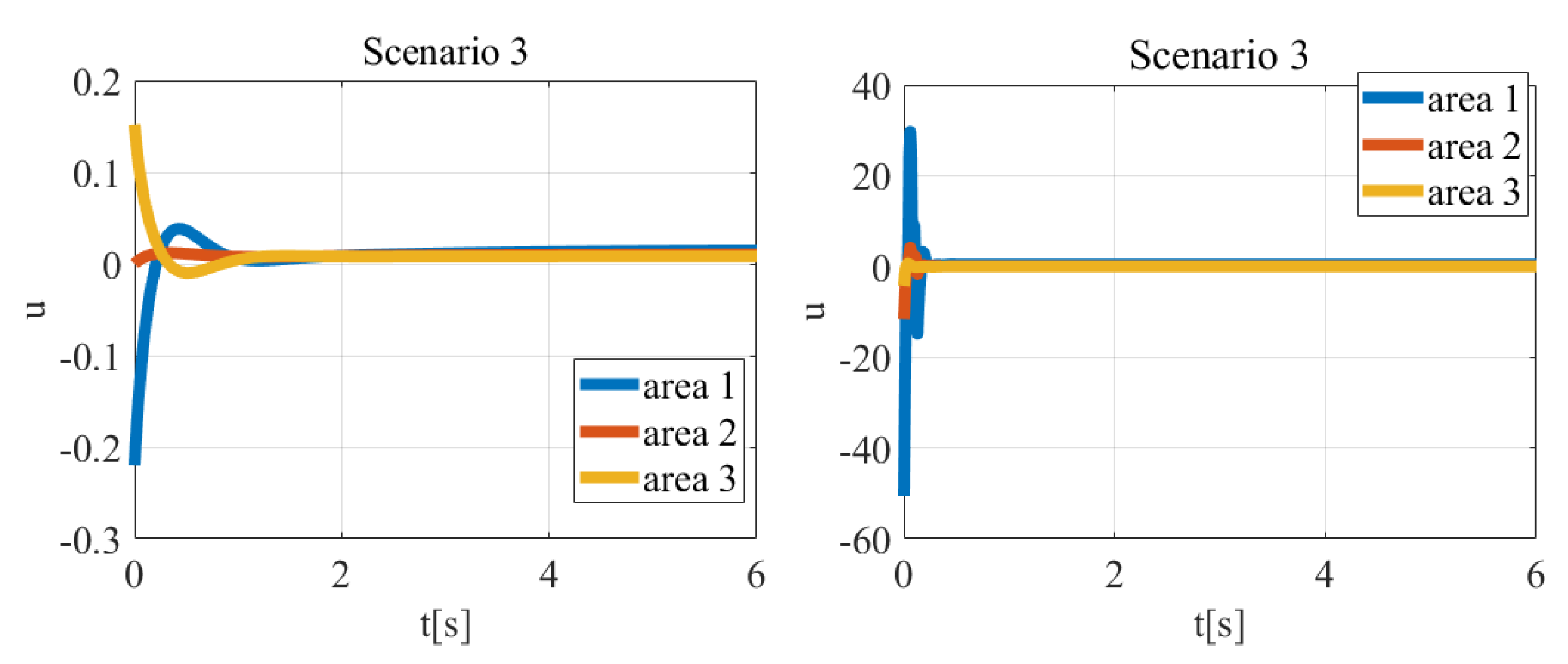
In the final third simulation scenario, the areas in the system were fully decouples, with all areas working independently. This, comparing with scenario 1 and 2, allowed us to add progressively the faults in the system, and thus check the robustness. In the case of the LQR control strategy, area 1 had the worst performance and energy consumption, while area 2 had the best performance and energy consumption. The performance in area 3 is rather in between other areas. In the case of the FLC control strategy, the performance measures were similar for all areas. However, in terms of integral indexes (IAE, ITAE), the LFC control strategy was better than the LQR strategy, but it was worse in terms of the energy consumption.
The obtained results show the significant differences in the performance of the presented control methods of the three-area power generation system. The performance of the LQR control strategy is better than the performance of the FLC strategy, in terms of most calculated quality indexes and energy consumption. Note that the LQR control is a model-based strategy, and it is strongly dependent on the quality of the provided model and requires the model in the linear form. The advantage is rather simple method to calculate the controller gains. On the contrary, the FLC control system is much easier to implement and develop, as it is a data-driven expert-based methodology.
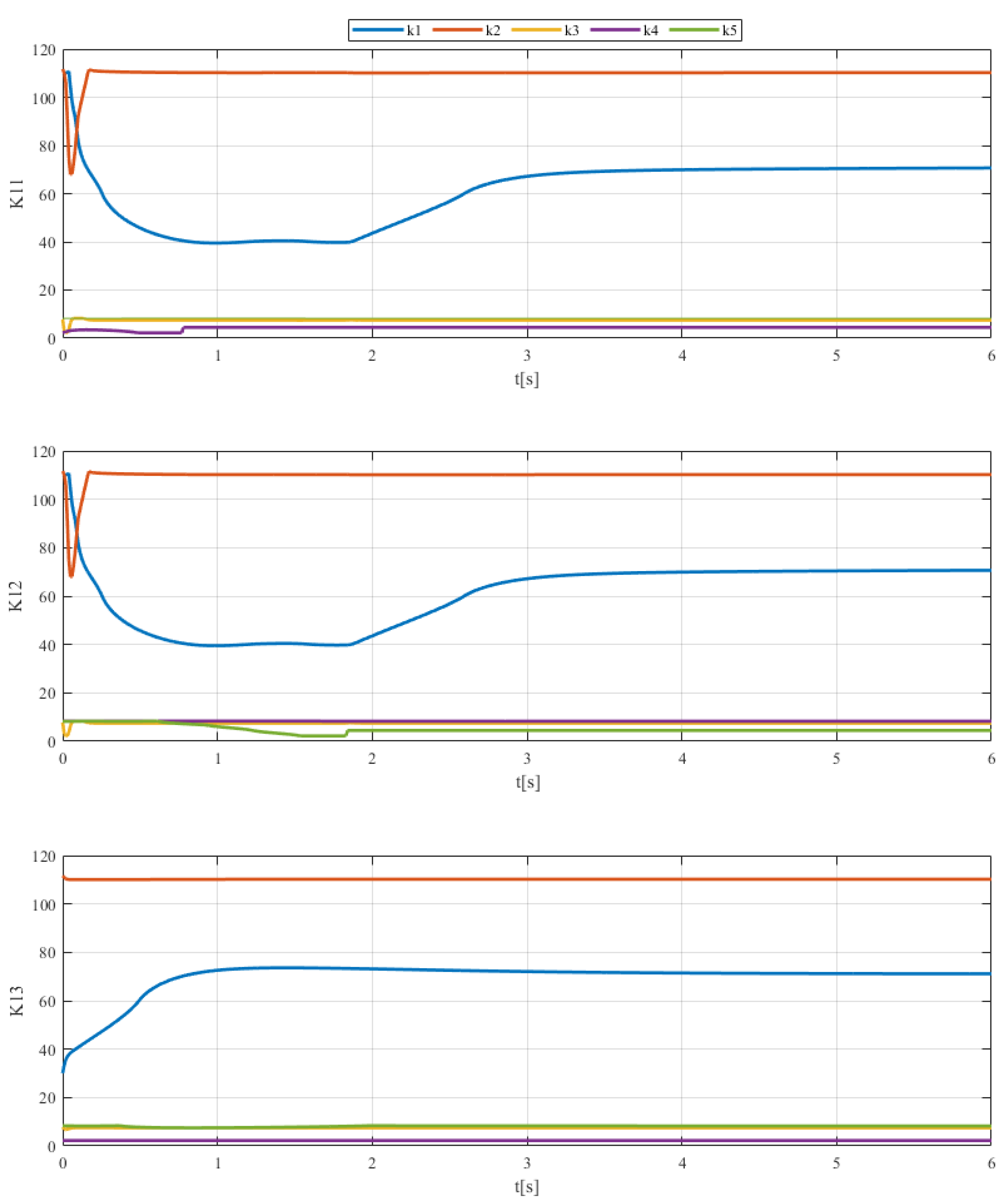
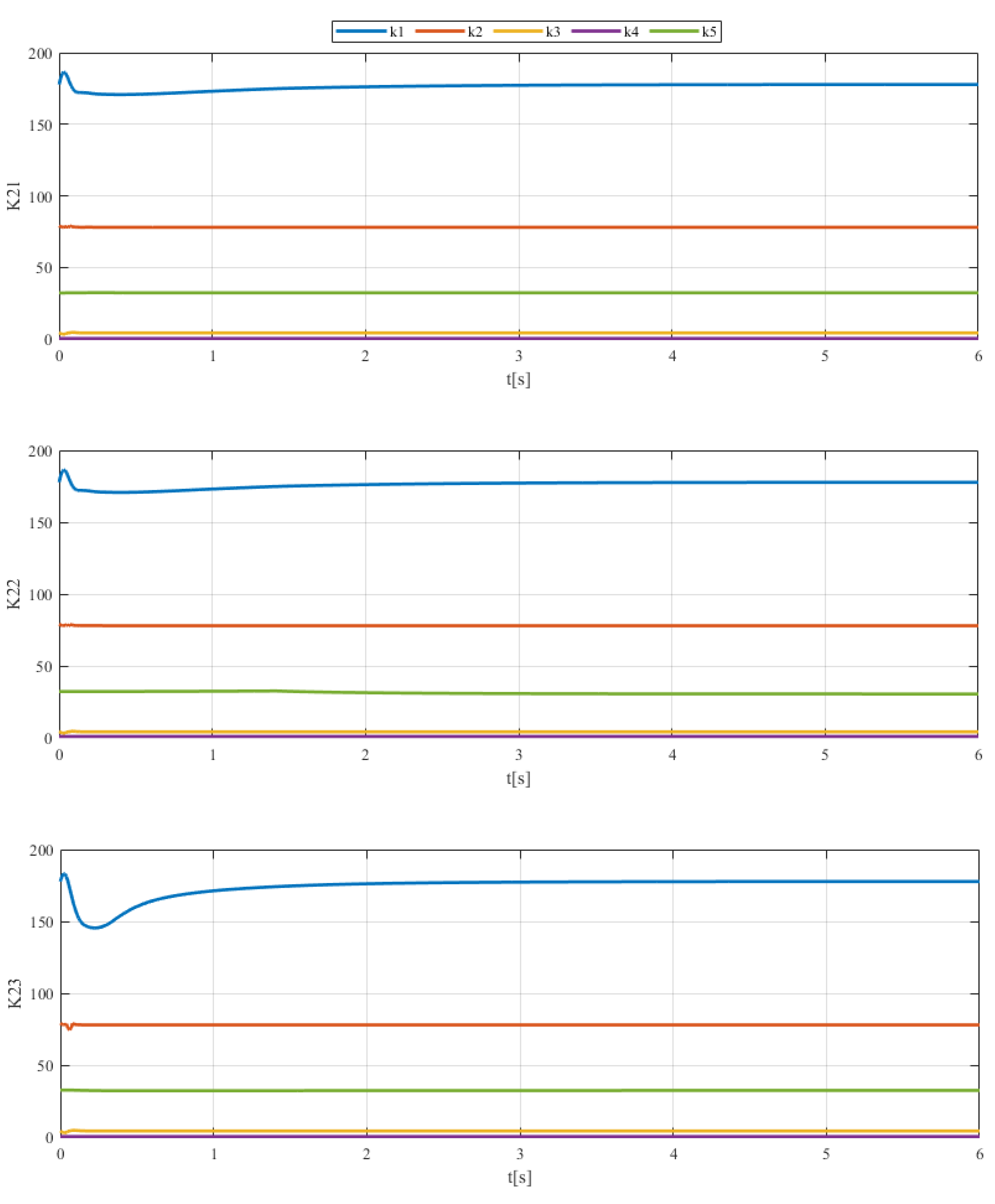
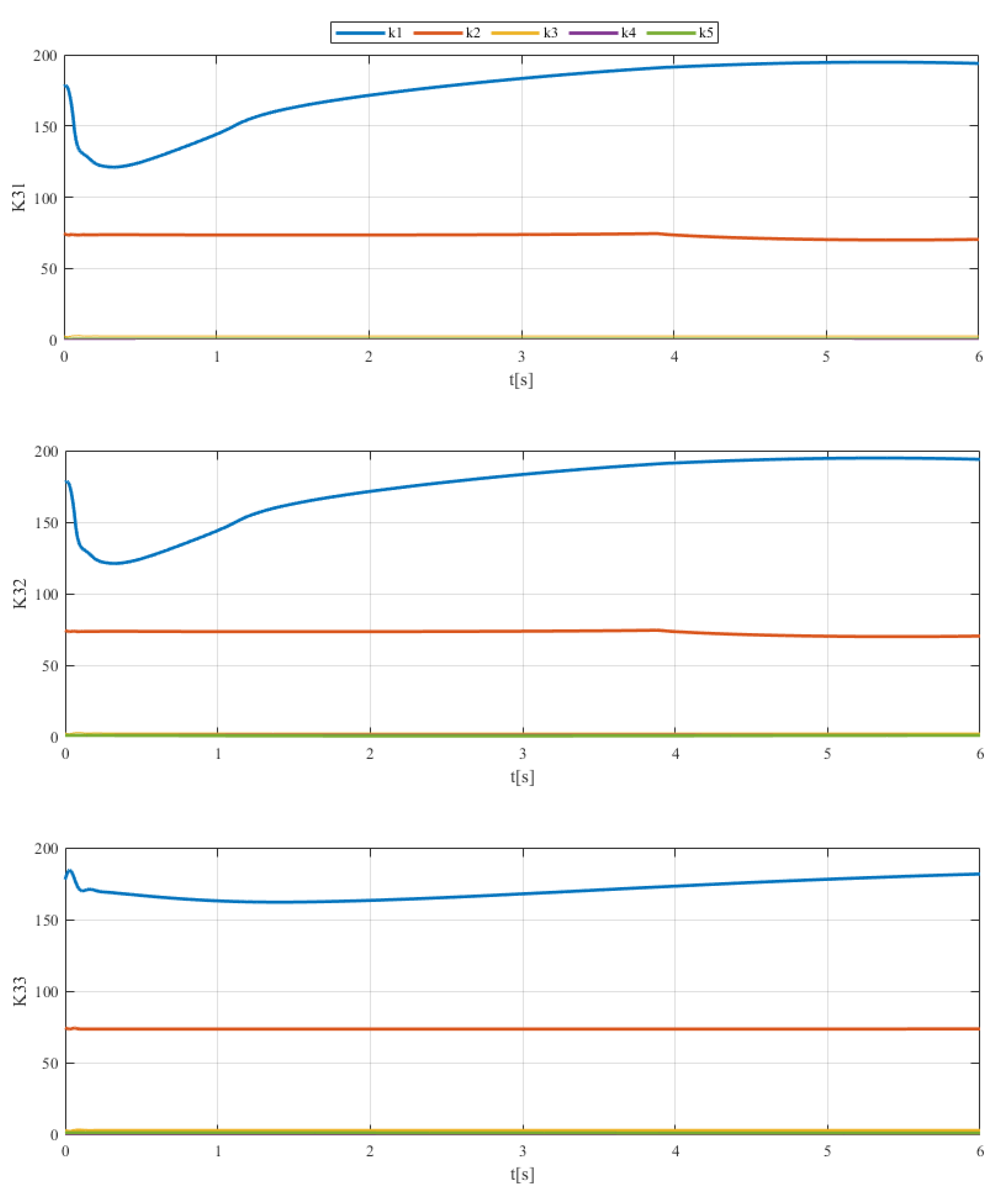
The differences in the performance and energy consumption can be explained by the significant differences in the controller gains between LQR and FLC algorithms (see
Table 3,
Table 4 and
Table 5, and
Figure 7,
Figure 8 and
Figure 9). The gains values and their range of changes during adaptation of FLC controller are much higher than the optimal values of the LQR controller. Thus, we get a very strong control signal.
However, the LQR controller have significant drawbacks. It is model-based optimal controller, and it requires the exact model in the state-space linear form. It does not preserve robustness from parameter changes and external disturbances characterizing real-life systems [
60]. In contrary, the FLC controller is fully data-driven, and the model is in form of cause–effect relationship functions, derived on the basis of the expert knowledge. Fuzzy control system can be used especially for the complex nonlinear process that includes uncertainty, and therefore there is no precise mathematical model available [
61] that, to some extent, can overcome the above-mentioned problems of LQR control system.
The biggest challenge, in case of FLC, is the definition of the rule base, and the controller parameters tuning. Most of the FLC controller tuning methods are based on genetic algorithms [
62], particle swarm optimization [
63] and therefore are time-consuming and very hard for practical implementation.
Therefore, the very simple method to minimize the gains is the introduction of the constraints of the gains.
5. Conclusions
This paper presents the comparison of two different strategies of the three-area power generation system (micro-grid) control. The first one is a model-based Linear Quadratic Regulator (LQR) strategy, where one optimal controller generates the control signal for all three areas. The second one is a data-driven Fuzzy Logic Controller (FLC), distributed to three areas, i.e., there is one FLC controller for each area.
The comparison was made, based on three scenarios describing different working conditions of the system, with the changing load, and decoupling of the areas. Both controllers worked properly in all scenarios; however, as the provided values of the calculated quality indexes show, the FLC control strategy is worse than the LQR strategy. It is mostly due to the difficult methodology of the FLC controller tuning. We can conclude that even if the data-driven methods do not require the model of the system and stabilize the system as expected, there are still problems with the proper choice of their parameters to obtain the desired performance.
The results obtained during the presented research, with the three area power generation system, showed that to apply the proposed control algorithms it is crucial to develop methods for tuning the controllers, especially the data-driven ones, to minimize the influence of disturbances and changes of the parameters. The proposed future work includes research on tuning methods of FLC controllers, and the comparison of the performance of the distributed control strategy in case of failures in areas (e.g., as the result of the cyber-attack).


 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}