1. Introduction
Airborne Wind Energy (
AWE) is the field of wind energy which aims at harvesting power from the wind through airborne systems. Airborne Wind Energy Systems (
AWESs) can access wind resources at higher altitudes and they can obtain the same power output of conventional wind turbines with a drastic reduction of mass, which could lead to a cost decrease [
1,
2]. Many concepts are being developed and they are classified according to how the aerodynamic force, needed for the power production, is generated. A classification of the currently pursued AWE concepts, their flight operations and developers is given in [
3]. The present paper is focusing on the development of
AWESs which produce aerodynamic force by flying crosswind. Crosswind
AWESs can generate power in two ways [
3]: with on-board wind turbines (Fly-Gen
AWESs) or with a generator placed at the ground station (Ground-Gen
AWESs), which can be fixed or moving [
3]. Fly-Gen
AWESs produce power on board and transmit it to the ground station through electric wires embedded in the tether [
4,
5]. Ground-Gen
AWESs with fixed ground station produce power cyclically. In the power generation phase, they produce power by pulling and unwinding the tether, which is connected to a generator. In the recovery phase, they fly back, spending some power, while the tether is wound back. Ground-Gen
AWESs are being developed with soft kites [
6,
7] or rigid wing aircrafts [
8,
9,
10].
To become a viable alternative to conventional wind turbines, AWESs flying crosswind need to display a sufficient reliability, thus allowing operations over long time frames. Therefore, design choices should keep robustness to external disturbances and failures as a premium goal. This in turn can be achieved through an increased knowledge of the dynamics of the flying craft, as a means to quantify how some characteristics of the AWES impact its performance, so as to allow suitably sizing the machine to meet all expectations.
The flight mechanics problem of AWESs is fundamentally different from the one of conventional aircraft for mainly three reasons: the presence of the wind, needed for the power generation (the average wind speed does not influence conventional aircraft flight stability analyses, as the inertial coordinate system can be considered to move with the average wind speed, but this is not the case for AWES), the presence of the tether, which transfers all forces acting on the airborne unit to the ground, and the need for maneuvers to keep the aircraft in the correct trajectory and attitude. It is therefore clear that conventional design techniques assuming straight and level flight can hardly be used for AWESs.
Makani Power [
4], before the shutdown, started investigating the possibility of designing the flight path and aerodynamic characteristics of the
AWES to achieve passive stability [
11,
12]. Stable
AWESs would maintain the flight path with the least amount of control activity. Previous works [
13,
14,
15] analyze the flight stability of kites not undertaking the crosswind motion for power generation. In this work, the kite crosswind motion needed for power generation is included in the analysis.
To achieve stability, the flight path should be properly chosen: a circular path makes the problem nearly axial-symmetric, and there exists one turning radius which ensures maximum tether force and potentially maximum power production [
16]. As this turning radius maximizes the tether force, a stable-by-design
AWES, if perturbed from this path, would tent to return to the operational point which maximizes tether force. This flight path is then selected for the present investigation.
The AWES aerodynamic design should help, as much as possible, the control system to achieve robust operations. An analytical modelling approach to study flight stability is presented in this text. The six d.o.f. equations of motion are linearized about a fictitious steady-state motion of the AWES in the circular path. No real steady-state can be achieved during power generation because of the continuous maneuvers of AWESs. Indeed, gravitational forces and aerodynamic forces related to the mean elevation angle act periodically on the kite. The fictitious steady-state motion, also called trim in this paper, is then computed by considering all the fluctuating terms as disturbances. The peculiarity of the selected flight path is that, if the fictitious steady-state is considered, centrifugal forces, induced by the constant turning maneuver, are balanced by the radial component of the force on the tether. In this way, lift is not used for the turn maneuver. The derivatives of external forces and moments are finally taken about the fictitious steady-state, to formulate the linearized problem.
Finally, the stability of the system can be studied by looking at the eigenvalues of the linearized system. The procedure to study stability is summarized in
Figure 1.
The linearized model allows for a simplified investigation of the influence of main wing geometry (position, area, aspect ratio, sweep, dihedral), main wing aerodynamics, control surfaces aerodynamics and geometry (area, aspect ratio, position), tether attachment position, tether mechanical and aerodynamic properties and mass properties of the AWES on flight stability. Also, since it does not primarily impact the dynamics of the flying craft, in this paper the power generation mechanism is not modeled. In this way, the model presented here can be used, with small modifications, to model both Ground-Gen and Fly-Gen AWESs.
As previously stated, the so-obtained model of the plant allows a good physical understanding of the effect of design choices on performance, and especially on stability. This in turn enables the formulations of design guidelines for the geometry and aerodynamics of rigid wing AWESs. Furthermore, the quality and characteristics of the model introduced in this paper bends itself to an adoption inside iterative optimal design tools, as well as for control design and tuning tasks.
An AWES designed to be stable, with the approach proposed in this work, has no guarantees to converge to the prescribed trajectory without control inputs. The formulation proposed here is meant to study the system dynamics of the AWES set to a state representative of its flight during the power generation loop. Therefore, the term stability in this paper refers to the ability of the system of returning to the fictitious steady-state if perturbed from it. As the fictitious steady-state is representative of the flight during the power generation loop, flight dynamic performances and control efforts over the loop are expected to benefit from a stable design.
The paper is organized as follows.
Section 2 presents the non-dimensional linearized equation of motion derived for a generic
AWES and
Section 3 deals with the derivation of the external forces acting on the
AWES. These two sections represent the mathematical basis for this paper and for subsequent work on the holistic
AWES design and are therefore intended to be very comprehensive and detailed.
Section 4 deals with the numerical implementation of the above mathematical model in
MATLAB®, while
Section 5 presents a preliminary validation of this tool. Finally,
Section 6 reports the results for different sets of configurations of increasing complexity and
Section 7 closes the manuscript summarizing the main findings of this research.
4. Computational Implementation of the Methodology
The linearized dynamics of the system, introduced in
Section 2 and
Section 3, are suitable for a quick parameterized analysis of a novel
AWES. An implementation has been carried out in
MATLAB® environment, aimed at the eigenanalysis and forward-in-time simulation of a system with an assigned geometry. The suite has been named
LT-GliDe (Linearized Tethered Gliding system Dynamics), and it is a module of an under-development multidisciplinary design and optimization framework for rigid wing
AWES, named
T-GliDe (Tethered Gliding system Design).
For a given
AWES, the code computes the trim condition, evaluates the external force derivatives and extracts the eigenvalues of the linearized system (Equation (
32)). The
AWES main wing, horizontal and vertical tails and tether properties are described by the variables listed in
Table 12 and
Table 13. The shortest number of variables is considered, to keep the problem as simple as possible, and to be able to analyze the influence of each property of the
AWES configuration on in-flight stability performance.
The relative positioning of the lifting surfaces, as well as the inertia matrix of the craft, are typically given in a reference system attached to the
AWES, which does not depend on the operational regime and might be centered in principle in any point of the aircraft. This coordinate system is called here body coordinate system
. In
Table 13, data of the lifting surfaces, and similarly the elements of the inertia matrix, are assigned in this coordinate system. To express the geometrical and inertial quantities given in
into
, where the equations have been written,
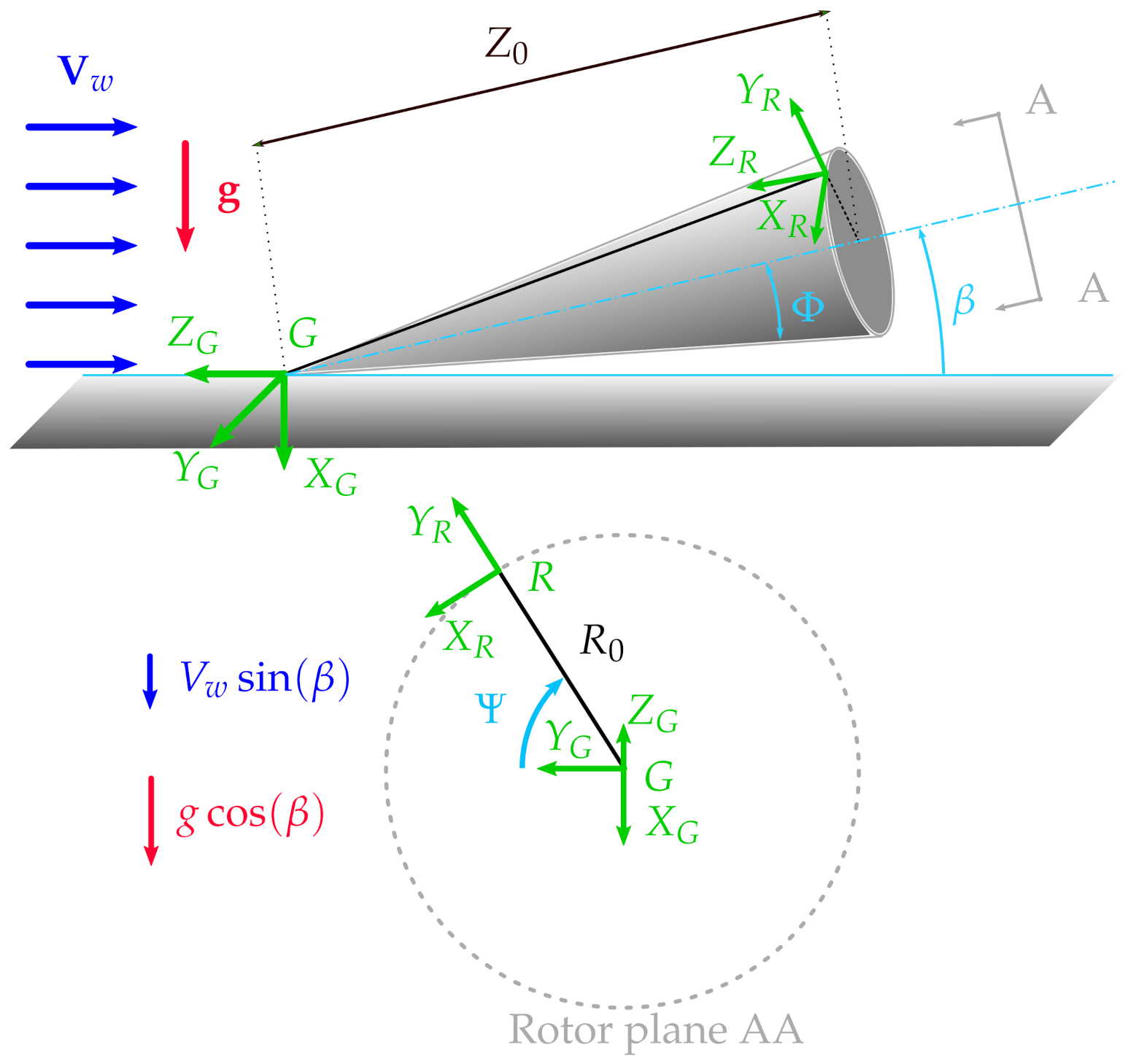
is defined as the angle around the
axis which describes a rotation from
to
. A graphical representation of
and
is given in
Figure 8, highlighting two possible flight conditions. Finally, the wind velocity and the elevation angle describe the operational regime.
Once the inputs are defined in LT-GliDe, the trim condition is computed. In particular, the turning radius , the kite velocity , the tether strain and the lifting properties of the control surfaces describe the trim condition. Algorithm 1 is used to find the trim condition for an AWES flying the circular path.
| Algorithm 1: Algorithm for the trim evaluation. |
![Energies 14 07704 i001]() |
The code is such that five different cases of increasing complexity can be analyzed. In
Table 14 they are summarized. Results from the five cases are introduced, so that complexity is incrementally increased and they can be compared. Case a models the motion of an aircraft in steady and leveled flight without tether (this is basically a standard aircraft in steady, horizontal flight). Case b models the motion of a tethered
AWES in a straight motion, with an imposed velocity. Case c models the motion of a tethered
AWES in a straight crosswind motion. Case d models the motion of a tethered
AWES in a circular motion, with an imposed velocity. Case e models the motion of a tethered
AWES in a circular crosswind motion.
Once the trimmed condition has been computed, the linearized dynamics are populated and the eigenproblem can be studied. The eigenvectors of the linearized system give information about its eigendynamics, while the eigenvalues provide a crucial information on the stability of the system.
6. Results
The results introduced here are meant to show the potential of the proposed approach. A detailed analysis of a
AWES designed for power generation is left to future works. In
Table 18 and
Table 19, the eigenvalues for the five cases are reported and linked to each other. The straight and circular motion cases are analyzed in the following sections.
6.1. Case a
This case models the straight and leveled flight of a conventional aircraft. No novelty is introduced in this case, as the tether is not present in the model and the aircraft is flying straight. Conventional longitudinal and lateral modes can be found. A lift coefficient of the main wing of 0.09 is found at a velocity of 80 m/s. The aircraft is longitudinally stable, with a static margin of 20.3 %. For a conventional aircraft, eight eigenvalues are found. Typically, the longitudinal motion can be described by four state variables (), which correspond to four eigenvalues: two pair of complex conjugate eigenvalues describing the so-called short period and the phugoid modes. The lateral-directional motion can be described by four state variables (), and it is typically characterized by a pair of complex conjugate (Dutch roll) and two real eigenvalues (spiral and roll subsidence mode).
6.2. Case b and c
For these cases, the tether is added and the mean elevation angle is set to zero, such that gravity is not influencing the results. The considered tether has a diameter of cm, the total length at rest is m, the drag coefficient and the Young modulus GPa. The linear spring constant associated to the tether is . The lift coefficient of the main wing is set to 0.9. Since the tether is part of the modelling, two new eigenvalues are expected, related to the position state variables and . The motion is straight, thus the longitudinal and lateral motions can be studied separately.
In
Table 18, the eigenvalues of case b and c are reported and associated with the eigenvalues of the airplane mode case. Eigenvalues and eigenmodes trends are consistent for the two cases, so that they are analyzed here together.
Figure 9 shows the longitudinal eigevalues for an increasing tether stiffness for case b. For
, the tether deformation
goes to infinity to produce enough force on the tether to balance the aerodynamic forces. As in this case the elastic effects are negligible, the tether force is a constant force applied on the tether attachment. This force could be understood as a gravitational force applied on the tether attachment and not on the center of mass.
As the elasticity grows, the short period increases the imaginary part. By performing the same plot for
, it is found that the short period has a vertical asymptote corresponding to the eigenmode of the system spring-mass with the elasticity from the tether and the mass from the kite. The phugoid increases its real part till approximately
kN/m and later decreases it. A new real longitudinal eigenmode starts from zero and moves in the real axis in the negative direction. In this paper, this eigenmode is called
Loyd mode, after Miles L. Loyd, who derived the first power equation of
AWESs [
23]. The Loyd eigenvalues collapse at very low tether stiffness to a value, suggesting that this mode is not influenced by the tether elasticity.
The Loyd mode involves mainly the longitudinal velocity
. For
AWESs, the longitudinal velocity in equilibrium is given by the balance of the projection of lift along the
axis and drag. When
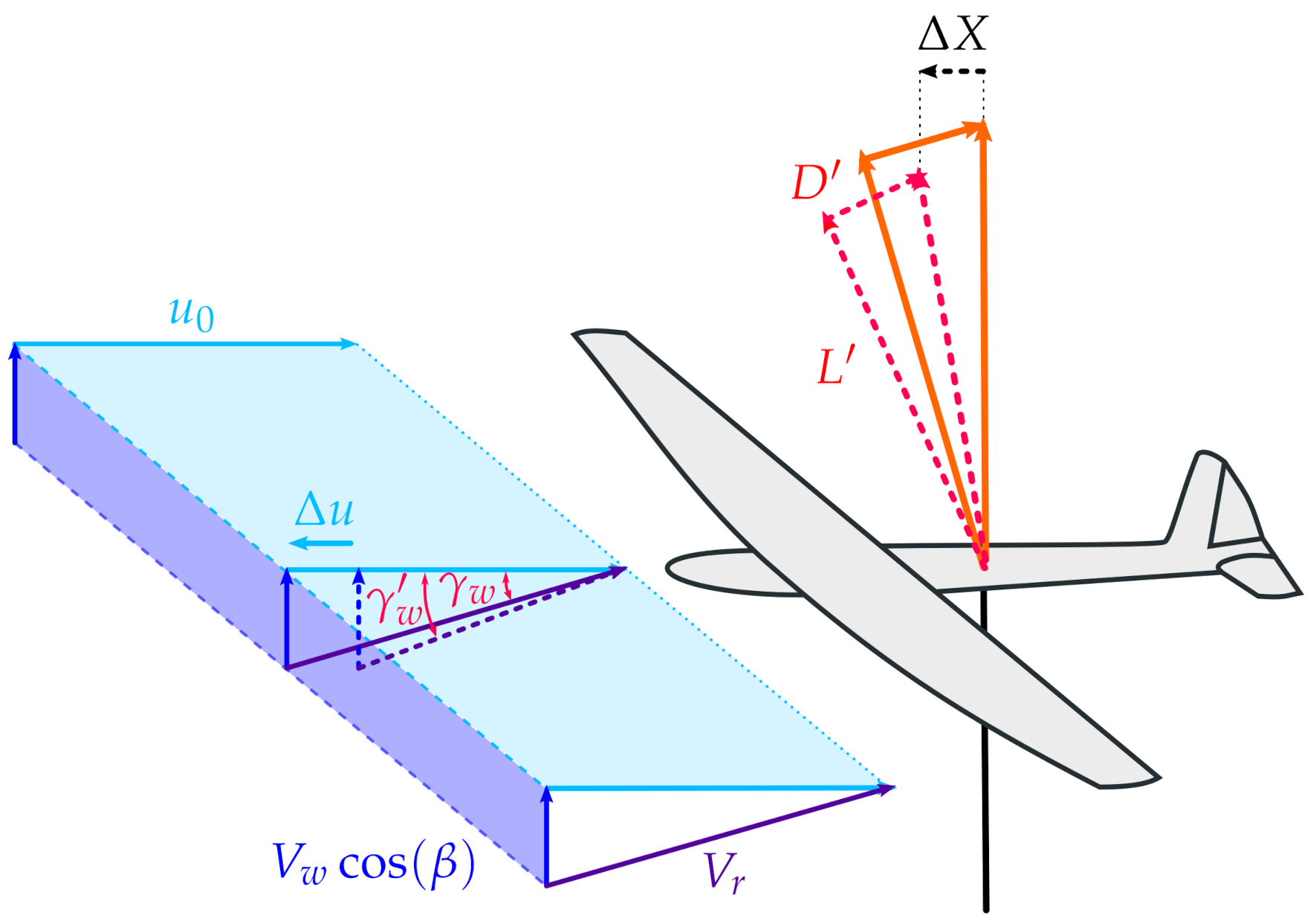
is perturbed, the kite tends to go back to the equilibrium point. A graphical representation of this mode is given in
Figure 10. In the figure, the
AWES velocity is decreased of
, such that the inflow angle
is increased with respect to the steady state value (
). Lift is perpendicular to the relative wind speed and a positive force
along the
axis is generated. This force acts to restore the equilibrium condition.
The eigenmode can be approximated by a simple first order differential equation in the general form
, such that the associated eigenvalue is
where the aerodynamic coefficients are related to the full flying craft. For the case with no wind (case b),
, then
For the straight motion case with wind (cases c),
, then
This approximation suggests that for a well designed
AWES this eigenvalue is always real and negative, as the term inside the brackets in Equations (
86) and (
87) is positive.
To better characterize the longitudinal modes, the eigenvalues are tracked as function of the tether attachment position along the
axis.
Figure 11 shows the longitudinal eigenvalues for an increasing distance between the tether attachment and the center of mass. When
m, the two points coincide, while when
m (nominal value considered in the paper), the tether attachment is placed 20 cm aft. Interestingly, the phugoid for high
collapses to two real eigenmodes, one of which moves along the real positive axis. The Loyd eigenvalue is basically fixed at low
and it drastically decreases its real part approximately when the phugoid becomes unstable.
Figure 12 shows two lateral eigenvalues as functions of the tether stiffness. The lateral mode related to Dutch roll and to roll subsidence are basically not influenced by the tether stiffness, then they are left out of the plot. The spiral mode increases its real part until matching another lateral eigenvalue on the real axis. After the two coalesce, they become complex conjugates for further values of the parameter. The coalescence happens at really low stiffness values (
kN/m), and the eigenvalues collapse rapidly to a location, suggesting that this mode is not influenced by the tether elasticity. The eigenvalues for
kN/m have the imaginary part much larger than the real part, suggesting that this mode is lightly damped. This new oscillating stable mode is dominated by a linear lateral motion (involving
), and small perturbations in
and
and it is called here
pendulum mode. Its natural frequency is
rad/s (case c).
By considering a pendulum composed by the tether and a kite subject to aerodynamic force, the oscillation frequency is , where T is the tether force, m is the kite mass and is the tether length. The frequencies found in this simplified way is rad/s (case c), close to what has been found in the LT-GliDe analysis.
By modifying the dihedral angle, while keeping the main wing aerodynamic center fixed to isolate the effect of the change, to
, the pendulum mode becomes unstable:
. If it is modified to
, the real part becomes more and more negative:
. Dihedral angle then largely influences the real part of the pendulum mode and should be considered to achieve stability. The spiral mode, for conventional aircrafts, depends on the dihedral angle: so does the pendulum mode for
AWESs, which arises from it (
Figure 12).
6.3. Case d
The circular motion is now considered. In this case, the inflow varies along the main wing and ailerons are used to trim the aircraft. In particular, it is assumed that ailerons deflections do not influence the section drag coefficient (i.e.,
). Longitudinal and lateral modes cannot be separated and they shall be studied together. However, by looking at the numerical values in
Table 19, short period, Dutch roll and roll subsidence have consistent values with the straight motion cases.
Figure 13 shows all the non-zero eigenvalues (apart from the roll subsidence) for the circular motion without wind (case d).
The pendulum mode is represented by a pair of complex conjugate eigenvalues starting from the origin. For kN/m, all points have the same value, suggesting that this mode is not influenced by the tether elasticity. The spiral mode eigenvalue moves along the real axis. For extremely low it moves towards the negative direction, and for kN/m it starts increasing in its real part again. It is basically not influenced by the tether stiffness. The Loyd mode decreases its real part as in the straight motion case and from low tether stiffness its eigenvalues are fixed to the same value.
6.4. Case e
In case e the wind velocity is considered and the kite speed is computed from the force balance. Similar to the previous cases, in
Figure 14 the eigenvalues are tracked for an increasing tether stiffness. Only the modes typical of
AWESs are shown in figure. Interestingly, Loyd and spiral modes are coalescing and merging into a pair of complex conjugate eigenvalues. The corresponding mode is called
positional mode in the paper. The positional mode is not influenced by tether stiffness, as for low values of rigidity the eigenvalues have the same value.
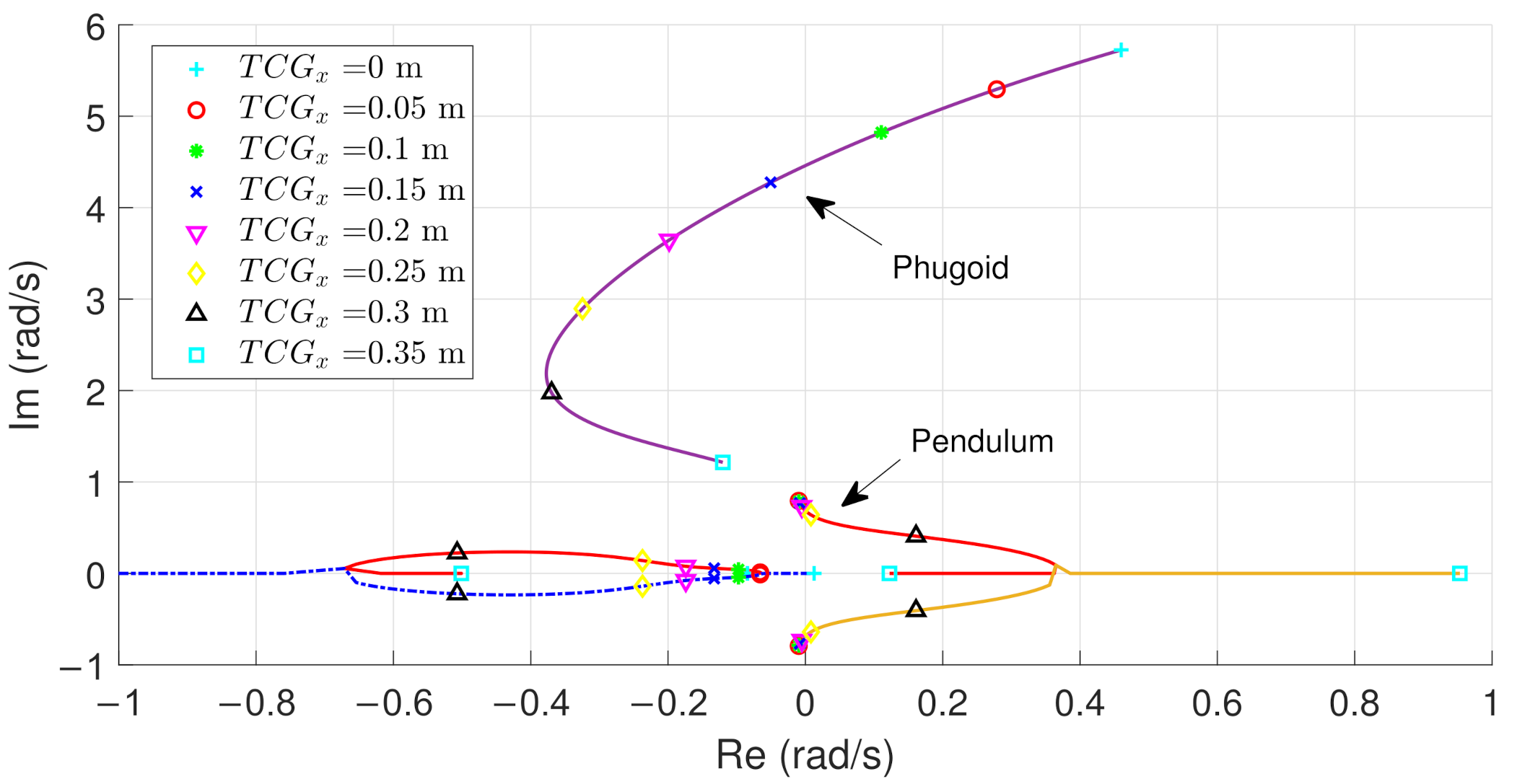
In
Figure 15, the eigenvalues are tracked as functions of the tether attachment position. The Loyd and the spiral mode for an increasing distance between the center of mass and tether collapse to a pair of complex conjugate eigenvalues (positional mode). This new oscillating mode is stable and highly damped. By increasing again
, the positional mode splits again in two real eigenvalues.
The phugoid is also largely influenced by the tether attachment position. For m, this mode is unstable, while when moving the tether attachment aft, its real part gets negative.
The pendulum mode eigenvalue displays instead an opposite trend. While moving the tether attachment aft, its real part becomes positive and finally the two pairs of complex conjugate eigenvalues become two real and positive eigenvalues. For the straight motion case (
Figure 11), for high
the phugoid splits into two real eigenvalues, while for the circular motion case the pendulum splits instead. This suggests that, when designing the
AWES for stability, the circular motion case with wind shall be considered to properly characterize the eigendynamics of the system: even if some of the eigenvalues for straight and circular motion are similar for some specific cases, trends over the full design space might change radically.
This analysis highlights the importance of carefully choosing the tether attachment position when designing for stability.
7. Conclusions
This paper introduces a methodology to study the flight stability of rigid wing Airborne Wind Energy Systems (AWESs). A fictitious steady state motion of the kite in a circular path is found by considering all fluctuating terms during the loop, such as gravity and aerodynamic forces related to the mean elevation angle, as disturbances. The selected circular path is characterized by a turning radius which makes the force on the tether to be maximized. Once the steady state is found, all derivatives of external forces are computed to formulate the linearized dynamics, and the flight stability can be studied from the ensuing model. As the fictitious steady state is representative of the flight over the loop, flight dynamic performances and control efforts are expected to benefit from a stable design.
The steady state forces and the aerodynamic derivatives are computed using an analytical approach. The computational cost of the linearized problem evaluation is negligible compared to other methods, which make this tool suitable for a preliminary design phase. Moreover, the analytical formulation allows for an intuitive and quantitative understanding of how stability is influenced by design parameters. Indeed, the modelling introduced in this work takes into account all the main design features of AWESs: main wing geometry (position, area, aspect ratio, sweep, dihedral), main wing aerodynamics, control surfaces aerodynamics and geometry (area, aspect ratio, position), tether attachment position, tether mechanical and aerodynamic properties and mass properties of the kite. Moreover, the non-uniform distribution of the inflow along the wing span, due to the rotational velocity of the kite, is also taken into account.
The presence of the tether introduces three new state variables compared to conventional aircraft flight mechanics. However, the variable describing the kite position in the circular path does not influence the linearized dynamics because the problem has been formulated to be axial-symmetric.
The model is implemented in MATLAB® and the suite has been named LT-GliDe (Linearized Tethered Gliding system Dynamics). LT-GliDe is a module of an under-development multidisciplinary design and optimization framework for rigid wing AWESs, named T-GliDe (Tethered Gliding system Design). Five cases of increasing complexity can be studied: AWES operating in aircraft mode (without tether), AWES operating in tethered straight motion without wind, AWES operating in tethered straight crosswind motion, AWES operating in tethered circular motion without wind, AWES operating in tethered circular crosswind motion.
The aerodynamic analytical derivatives have been validated using vortex lattice method (TORNADO) and an internally-designed glider, called Zefiro, is used to validate the problem formulation for straight and leveled flight. Zefiro is then used as an example to show the features of this modelling approach. A tether is attached to Zefiro in a position such that all eigenvalues have a negative real part for the tethered circular crosswind motion case. The five cases are finally analyzed.
In straight tethered motion, longitudinal and lateral motion can be decoupled. Ten non-null eigenvalues are found, two more than a conventional aircraft in steady and leveled flight. It has been shown how the tether modifies the conventional eigenmodes and the physics of two new modes is explained. The Loyd mode is a mode typical of AWESs, which brings the kite back to the equilibrium longitudinal velocity after a perturbation. The pendulum mode arises by the merge of a new mode with the spiral mode and has the frequency of a pendulum characterized by the force applied on the tether. Its real part, defining the mode stability, is largely influenced by the main wing dihedral angle.
In circular motion, longitudinal and lateral equations are coupled and so are the eigenmodes. However, short period, Dutch roll and roll subsidence eigenvalues have consistent values with the straight motion cases. Eleven non-null eigenvalues are found in this case, three more than for conventional aircrafts. Two are due to the presence of the tether and one to the steady maneuver. Also in this case, the pendulum mode can be found, as well as the Loyd mode in the case without wind. For the crosswind circular motion case, the Loyd mode merges with the spiral mode to bear a pair of complex conjugate eigenvalues (positional mode).
It is investigated how the tether attachment position influences stability. By moving the tether attachment aft with respect to the center of mass, the phugoid becomes stable and the pendulum mode unstable. The tether attachment location should then be carefully designed to achieve stability of all modes. Flight mechanics should generally be studied with the circular crosswind motion model, as the eigendynamics for this case can be radically different from the more simplified other cases.
As LT-GliDe is suitable for preliminary design and optimization of rigid wing AWESs, it is being included in a system design framework (T-GliDe) and optimal designs will be analyzed in future works. It is expected that an aircraft designed with this approach will reduce control action and the need for control authority. Aero-elastic time-marching simulations are envisaged to study the eigenmodes and the controllability with higher fidelity codes.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














