
Development and Performance Study of Temperature and Humidity Regulator in Baby Incubator Using Fuzzy-PID Hybrid Controller

 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Heat Transfer Temperature and Humidity
2.2. Hardware Design
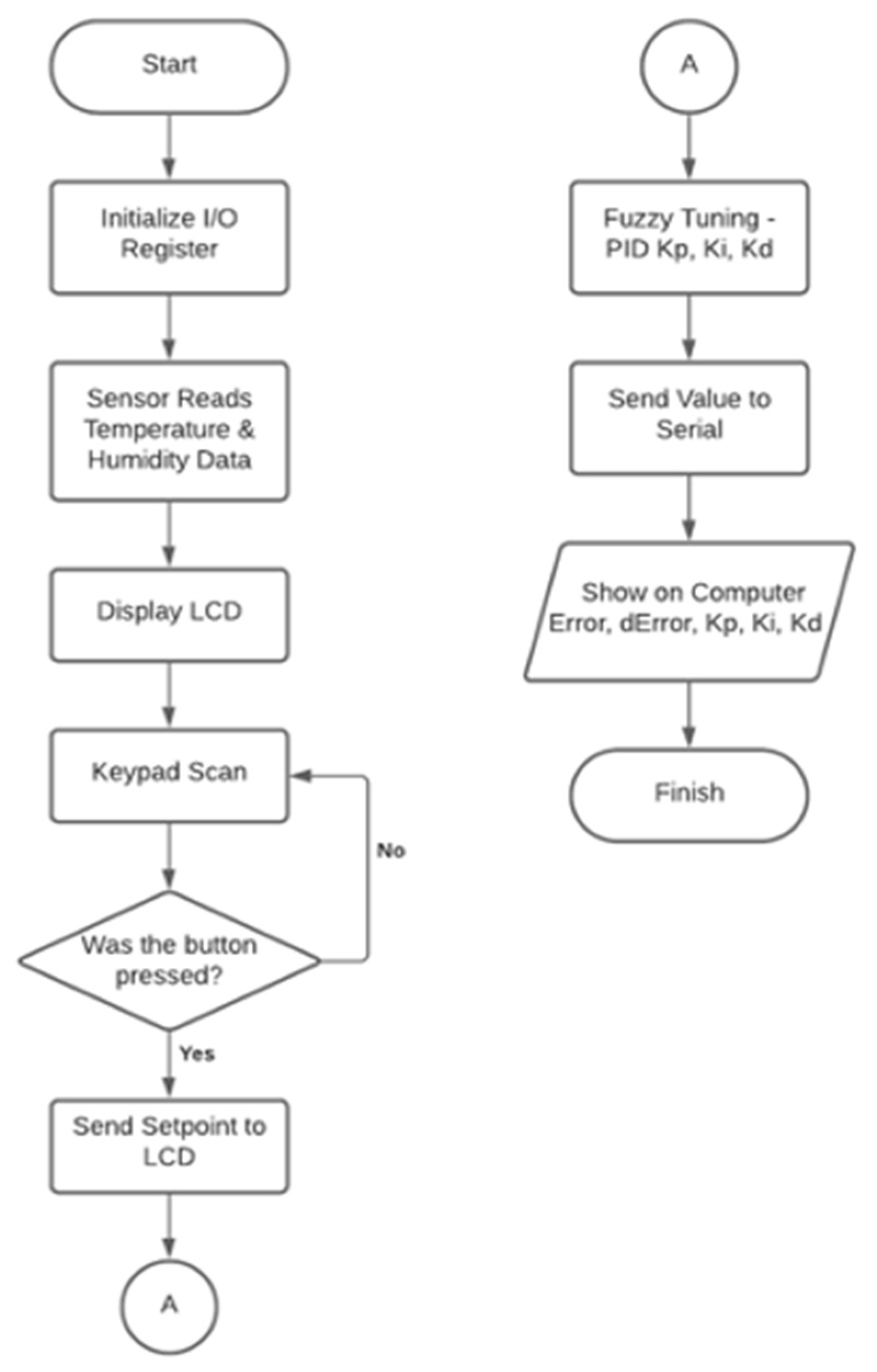
2.3. Software Design
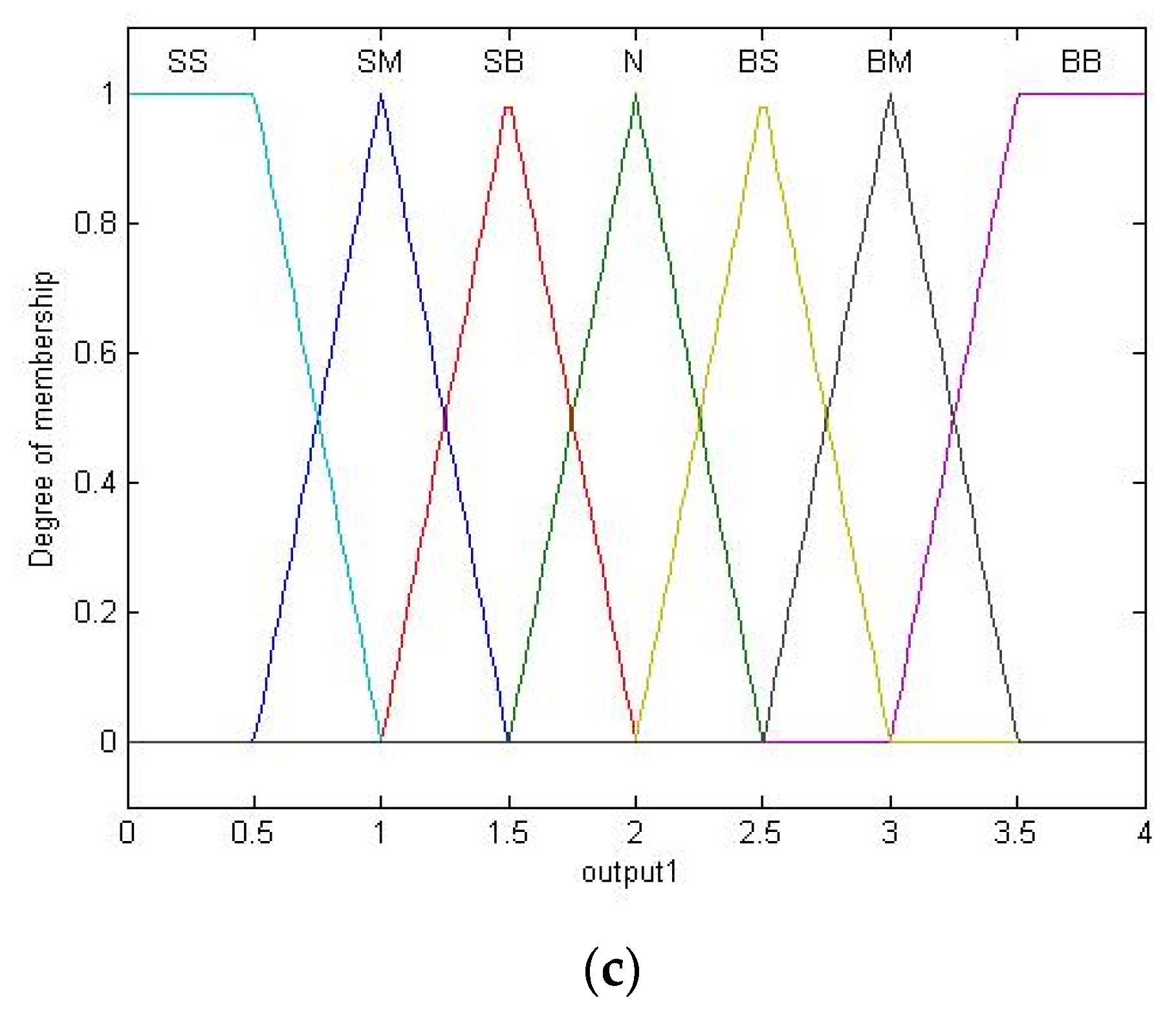
2.4. Member Function
2.5. Inference Mathematical Model
2.6. Fuzzy Logic Rules
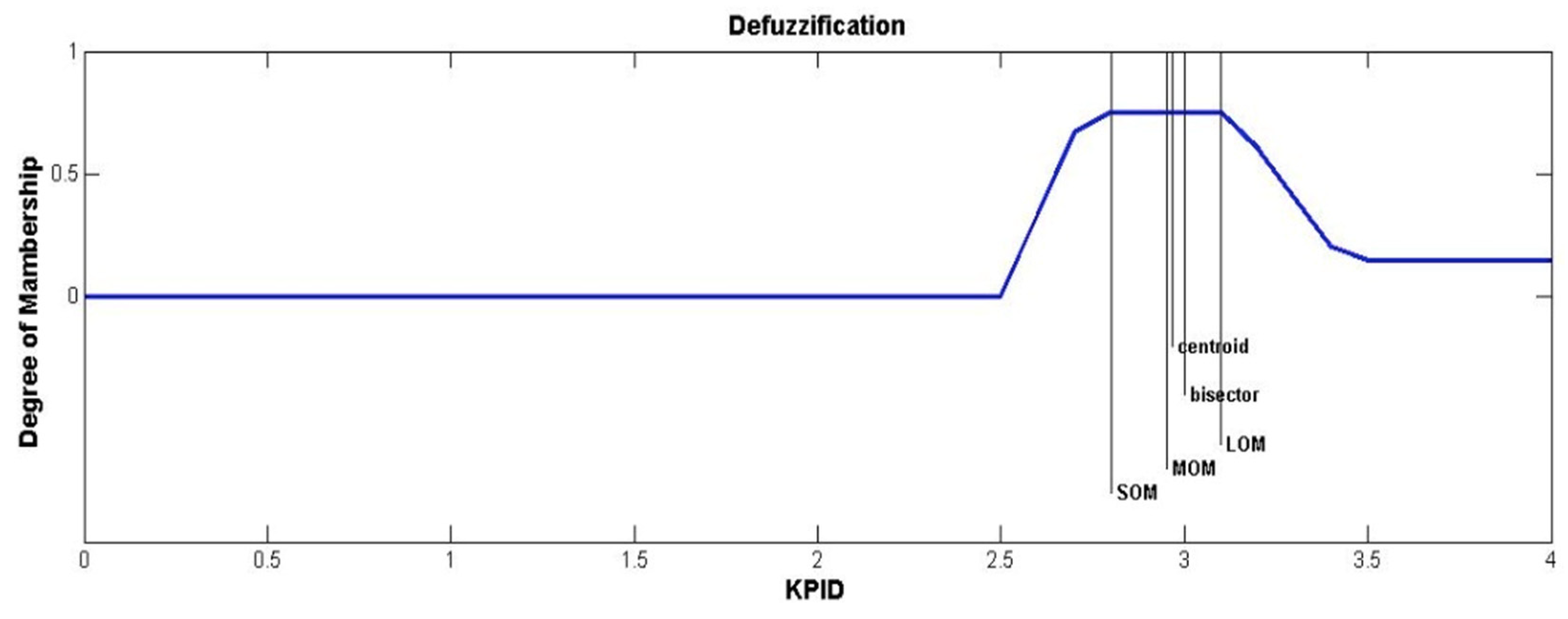
2.7. Defuzzification
3. Experimental Results
3.1. SHT11 Sensor Characterization Testing
3.2. Software Testing
Testing System Response to Set Point
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. The Basic Programing for Fuzzification Line Pieces
| ’error |
| Min_error = −10 |
| Max_error = 10 |
| Min_error_negative = −10 |
| Middle_error_negative = −5 |
| Max_error_negative = 0 |
| Min_error_zero = −5 |
| Middle_error_zero = 0 |
| Max_error_zero = 5 |
| Min_error_positive = 0 |
| Middle_error_positive = 5 |
| Max_error_positive = 10 |
| Degree_error_negative = 0 |
| Degree_error_zero = 0 |
| Degree_error_positive = 0 |
| Error_negative = 0 |
| Error_zero = 0 |
| Error_positive = 0 |
| Error_condition_min = 0 |
| Error_condition_max = 0 |
Appendix A.2. Mathematical Model Inference
Appendix A.2.1. Error Input
A.2.2. Delta-Error Input
A.2.3. Output
Appendix A.3. Fuzzy Logic Rules Tables Fuzzy-Pid (Kp, Ki and Kd)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Kp | ∆E | |||||
|---|---|---|---|---|---|---|
| NB | NS | Z | PS | PB | ||
| E | NB | BB | PM | PM | BS | N |
| NS | PM | PM | BS | N | KS | |
| Z | PM | BS | N | KS | KM | |
| PS | BS | N | KS | KS | KM | |
| PB | N | KM | KM | KM | KB | |
| Ki | ∆E | |||||
|---|---|---|---|---|---|---|
| NB | NS | Z | PS | PB | ||
| E | NB | KB | KM | KM | KS | N |
| NS | KB | KM | KS | KS | N | |
| Z | KM | KS | N | BS | BM | |
| PS | NM | NS | BS | BS | BB | |
| PB | N | BS | BM | BM | BB | |
| Kd | ∆E | |||||
|---|---|---|---|---|---|---|
| NB | NS | Z | PS | PB | ||
| E | NB | KS | KM | KM | KM | KS |
| NS | N | KM | KM | KS | N | |
| Z | N | KS | KS | KS | N | |
| PS | N | N | N | N | N | |
| PB | BM | BM | BM | KS | BM | |
Appendix A.4. In Programming the Microcontroller the Coding Piece
Appendix A.5. The Coding Fragment for Programming the Microcontroller
Appendix A.6. This Study Used 25 Fuzzy Logic Rules
- If (error is NB) and (DeltaError is NB) then (output1 is BB) (1)
- If (error is NS) and (DeltaError is NB) then (output1 is BM) (1)
- If (error is z) and (DeltaError is NB) then (output1 is BM) (1)
- If (error is PS) and (DeltaError is NB) then (output1 is BS) (1)
- If (error is PB) and (DeltaError is NB) then (output1 is N) (1)
- If (error is NB) and (DeltaError is NS) then (output1 is BM) (1)
- If (error is NS) and (DeltaError is NS) then (output1 is BM) (1)
- If (error is z) and (DeltaError is NS) then (output1 is BS) (1)
- If (error is PS) and (DeltaError is NS) then (output1 is N) (1)
- If (error is PB) and (DeltaError is NS) then (output1 is SM) (1)
- If (error is NB) and (DeltaError is Z) then (output1 is BM) (1)
- If (error is NS) and (DeltaError is Z) then (output1 is BS) (1)
- If (error is z) and (DeltaError is Z) then (output1 is N) (1)
- If (error is PS) and (DeltaError is Z) then (output1 is SS) (1)
- If (error is PB) and (DeltaError is Z) then (output1 is SM) (1)
- If (error is NB) and (DeltaError is PS) then (output1 is BS) (1)
- If (error is NS) and (DeltaError is PS) then (output1 is N) (1)
- If (error is z) and (DeltaError is PS) then (output1 is SS) (1)
- If (error is PS) and (DeltaError is PS) then (output1 is SS) (1)
- If (error is PB) and (DeltaError is PS) then (output1 is SM) (1)
- If (error is NB) and (DeltaError is PB) then (output1 is N) (1)
- If (error is NS) and (DeltaError is PB) then (output1 is SS) (1)
- If (error is z) and (DeltaError is PB) then (output1 is SM) (1)
- If (error is PS) and (DeltaError is PB) then (output1 is SM) (1)
- If (error is PB) and (DeltaError is PB) then (output1 is SB) (1)
References
- Fadilla, R.; Idhil, A.N.I.I.; Anggraini, M.A.P.; Dewi, A.K.; Sanjaya, M.R.; Nurrohman, M.Y. Rahmadwati A Multifunction Infant Incubator Monitoring System with Phototherapy and ESP-32 Based Mechanical Swing. Int. J. Sci. Technol. Manag. 2020, 1, 371–381. [Google Scholar] [CrossRef]
- Belizán, J.M.; McClure, E.M.; Goudar, S.S.; Pasha, O.; Esamai, F.; Patel, A.; Chomba, E.; Garces, A.; Wright, L.L.; Koso-Thomas, M.; et al. Neonatal Death in Low- to Middle-Income Countries: A Global Network Study. Am. J. Perinatol. 2012, 29, 649–656. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zaid, A.S.; Yahya, Y.Z.; Kandemirli, F. LabVIEW BASED TEMPERATURE CONTROL SYSTEM FOR NEONATAL INCUBATOR. Eurasian J. Sci. Eng. Technol. 2020, 1, 20–26. Available online: https://dergipark.org.tr/en/pub/ejset/725589 (accessed on 20 April 2021).
- Wei, M.; Wang, B.; Liu, S. Numerical Simulation of Heat and Moisture Transfer of Wall with Insulation. J. Phys. Conf. Ser. 2019, 1300, 1–8. [Google Scholar] [CrossRef]
- Voelker, C.; Hoffmann, S.; Kornadt, O.; Arens, E.; Zhang, H.; Huizenga, C. Heat And Moisture Transfer Through Clothing. Science 2009, 11, 1360–1366. [Google Scholar]
- Ren, T.; Li, A.; Lv, W. Field and Laboratory Tests and Analyses on Temperature and Relative Humidity in Underground Multi-tunnels. Procedia Eng. 2017, 205, 27–34. [Google Scholar] [CrossRef]
- Sobolewski, A.; Młynarczyk, M.; Konarska, M.; Bugajska, J. The influence of air humidity on human heat stress in a hot environment. Int. J. Occup. Saf. Ergon. 2021, 27, 226–236. [Google Scholar] [CrossRef]
- Liang, G.; Niu, D.; Liang, Y. Sustainability Evaluation of Renewable Energy Incubators Using Interval Type-II Fuzzy AHP-TOPSIS with MEA-MLSSVM. Sustainability 2021, 13, 1796. [Google Scholar] [CrossRef]
- Hariyanto, M.W.; Hendrawan, A.H.; Ritzkal, R. Monitoring the Environmental Temperature of the Arduino Assistance Engineering Faculty Using Telegram. J. Robot. Control. (JRC) 2020, 1, 96–101. [Google Scholar] [CrossRef] [Green Version]
- Latif, A.; Widodo, H.A.; Atmoko, R.A.; Phong, T.N.; Helmy, E.T. Temperature and Humidity Controlling System for Baby Incubator. J. Robot. Control. (JRC) 2021, 2, 190–193. [Google Scholar] [CrossRef]
- Usman, A.; Marwazi, H.; Alam, S. Temperature and humidity test of the telemetry tool modeling in baby incubator. Sanitas 2018, 9, 16–23. [Google Scholar] [CrossRef] [Green Version]
- Latif, A.; Arfianto, A.Z.; Poetro, J.E.; Phong, T.N.; Helmy, E.T. Temperature Monitoring System for Baby Incubator Based on Visual Basic. J. Robot. Control. (JRC) 2021, 2, 47–50. [Google Scholar] [CrossRef]
- Li, Y.; Dou, W.; Zhou, C.; Wang, X.; Yang, A.; Zhang, Y.; Qiao, D. A Microtester for Measuring the Reliability of Microdevices in Controlled Environmental Conditions. Micromachines 2021, 12, 585. [Google Scholar] [CrossRef] [PubMed]
- Zeb, K.; Islam, S.U.; Din, W.U.; Khan, I.; Ishfaq, M.; Busarello, T.D.C.; Ahmad, I.; Kim, H.J. Design of Fuzzy-PI and Fuzzy-Sliding Mode Controllers for Single-Phase Two-Stages Grid-Connected Transformerless Photovoltaic Inverter. Electronics 2019, 8, 520. [Google Scholar] [CrossRef] [Green Version]
- Shen, X.; Xie, T.; Wang, T. A Fuzzy Adaptative Backstepping Control Strategy for Marine Current Turbine under Disturbances and Uncertainties. Energies 2020, 13, 6550. [Google Scholar] [CrossRef]
- Guardeño, R.; López, M.J.; Sánchez, V.M. MIMO PID Controller Tuning Method for Quadrotor Based on LQR/LQG Theory. Robotics 2019, 8, 36. [Google Scholar] [CrossRef] [Green Version]
- Widhiada, W.; Negara, D.N.; Suryawan, P.A. Temperature Distribution Control for Baby Incubator System Using Arduino AT Mega 2560. Bali Indones. 2017, 19, 1748–1751. Available online: https://simdos.unud.ac.id/uploads/file_penelitian_1_dir/d8cee6e73f739dc11ac9590012345664.pdf (accessed on 17 June 2021).
- Goksu, O.F.; Arabul, A.Y.; Vurol, R.A. Low Voltage Battery Management System with Internal Adaptive Charge and Fuzzy Logic Controller. Energies 2020, 13, 2221. [Google Scholar] [CrossRef]
- Musa, S.; Radzi, M.A.M.; Hizam, H.; Wahab, N.I.A.; Hoon, Y.; Zainuri, M.A.A.M. Modified Synchronous Reference Frame Based Shunt Active Power Filter with Fuzzy Logic Control Pulse Width Modulation Inverter. Energies 2017, 10, 758. [Google Scholar] [CrossRef]
- Ibrahim, B.S.K.I.; Aziah, M.; Ahmad, S.; Akmeliawati, R.; Nizam, H.; Muthalif, A.G.A.; Toha, S.; Hassan, I.D.M.K. Fuzzy-based Temperature and Humidity Control for HV AC of Electric Vehicle. Procedia Eng. 2012, 41, 904–910. [Google Scholar] [CrossRef] [Green Version]
- Lü, B.; Pei, C.Q.; Tian, J.S.; Wen, W.L.; Wang, J.F.; Tian, J.S. Design and Implementation of the Intelligent Streak Camera Control System Based on Internet of Things. Acta Photonica Sin. 2017, 46, 522002. [Google Scholar] [CrossRef]
- Li, S.; Qu, Z.; Song, Z. A Multifunctional Combination Incubator. Energies 2020, 13, 6622. [Google Scholar] [CrossRef]
- Uzoigwe, L.O.; Elkezie, J.C. Egg Incubator Control System with Short Message Service (SMS) Fault Analysis Alert. J. Fac. Agric. Vet. Med. 2013, 11, 45–68. [Google Scholar] [CrossRef]
- Olasunkanmi, J.N.; Akintade, O.O.; Kehinde, L.O. Development of a GSM based DC Powered Bird Egg Incubator. J. Eng. Res. Technol. 2015, 4, 104–109. Available online: www.ijert.org (accessed on 29 September 2021).
- Youssef, A.; Norton, T.; Berckmans, D. Bioenvironmental Zonal Controlling of Incubated Avian Embryo Using Localised Infrared Heating. Processes 2019, 7, 651. [Google Scholar] [CrossRef] [Green Version]
- Ishak, D.N.F.M.; Jamil, M.M.A.; Bin Ambar, R. Arduino Based Infant Monitoring System. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Melaka, Malaysia, 2017; Volume 226, p. 012095. [Google Scholar]
- Agresara, M.N.; Vyas, D.D.; Bhensdadiya, B.S. System for Remote Monitoring and Control of Baby Incubator and Warmer. System 2016, 3, 6. [Google Scholar]
- Radhika, B.; Sheshagiri Rao, V.R. Incubator baby parameter sensing and monitoring. Int. J. Innov. Technol. Explor. Eng. 2019, 8, 2945–2947. [Google Scholar]
- Al-Sawaff, Z.H.; Yahya, Y.Z.; Kandemirli, F. Neonatal Incubator Embedded Temperature Observation and Monitoring Using GSM. J. Eng. Res. Rep. 2019, 4, 1–9. [Google Scholar] [CrossRef]
- Shabaan, A.R.; El-Metwally, S.M.; Farghaly, M.M.; Sharawi, A.A. PID and fuzzy logic optimized control for temperature in infant incubators. In Proceedings of the 2013 5th International Conference on Modelling, Identification and Control (ICMIC), Cairo, Egypt, 31 August–2 September 2013; pp. 53–59. [Google Scholar]
- Utomo, S.B.; Irawan, J.F.; Mujibtamala, A.; Nari, M.I.; Amalia, R. Automatic baby incubator system with fuzzy-PID controller. In IOP Conference Series: Materials Science and Engineering; IOP Publishing: Malang, Indonesia, 2021; Volume 1034, p. 012023. [Google Scholar]
- Jin, A.; Wu, H.; Zhu, H.; Hua, H.; Hu, Y. Design of temperature control system for infant radiant warmer based on Kalman filter-fuzzy PID. In Journal of Physics: Conference Series; IOP Publishing: Shanghai, China, 2020; Volume 1684, p. 012140. [Google Scholar]
- Soesanti, I.; Syahputra, R. A Fuzzy Logic Controller Approach for Controlling Heat Exchanger Temperature. J. Electr. Technol. UMY 2019, 3, 117–124. [Google Scholar] [CrossRef] [Green Version]
- Wang, R. The Design of Temperature and Humidity Control System Based on Fuzzy Control in Multi Incubators. In Advances in Electronic Engineering, Communication and Management; Springer: Berlin/Heidelberg, Germany, 2012; pp. 15–18. [Google Scholar]
- Flores, S.A.I.; Konno, H.J.; Massafra, A.M.; Schiaffino, L. Simultaneous Humidity and Temperature Fuzzy Logic Control in Neonatal Incubators. In Proceedings of the 2018 Argentine Conference on Automatic Control (AADECA), Buenos Aires, Argentina, 7–9 November 2018. [Google Scholar]
- Marwanto, A.; Sunriyadi, K.; Alifah, S. Fuzzy Logic Implementation For Incubator Prototype With Temperature And Humidity Control. In Proceedings of the 2019 6th International Conference on Electrical Engineering, Computer Science and Informatics (EECSI), Bandung, Indonesia, 18–20 September 2019; pp. 71–74. [Google Scholar]
- Zermani, M.A.; Feki, E.; Mami, A. Multivariable control applied to temperature and humidity case study: Neonate incubator. In Proceedings of the 2012 20th Mediterranean Conference on Control & Automation (MED), Barcelona, Spain, 3–6 July 2012; pp. 1440–1445. [Google Scholar]
- Theopaga, A.K.; Rizal, A.; Susanto, E. Design and implementation of PID control based baby incubator. J. Theor. Appl. Inf. Technol. 2014, 70, 19–24. [Google Scholar]
- Widhiada, W.; Antara, I.N.G.; Budiarsa, I.N.; Karohika, I.M.G. The Robust PID Control System of Temperature Stability and Humidity on Infant Incubator Based on Arduino AT Mega 2560. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Jeju Island, Korea, 2019; Volume 248, p. 012046. [Google Scholar]














| Error | Delta Error | Defuzzification | Average | ||||
|---|---|---|---|---|---|---|---|
| Centroid | Bisector | MOM | LOM | SOM | |||
| −15 | −1.5 | 3.62 | 3.64 | 3.76 | 0 | 3.52 | 2.908 |
| −12 | −1.2 | 3.62 | 3.64 | 3.76 | 0 | 3.52 | 2.908 |
| −9 | −0.9 | 3.5 | 3.56 | 3.72 | 0 | 3.44 | 2.844 |
| −6 | −0.6 | 3.14 | 3.08 | 3 | 0 | 2.92 | 2.428 |
| −3 | −0.3 | 2.56 | 2.64 | 2.98 | 0 | 2.6 | 2.156 |
| 0 | 0 | 2 | 2 | 2 | 0 | 2 | 1.6 |
| 3 | 0.3 | 1.02 | 0.68 | 0.34 | 0 | 0 | 0.408 |
| 6 | 0.6 | 0.643 | 0.52 | 0.3 | 0 | 0 | 0.2926 |
| 9 | 0.9 | 1.2 | 1.36 | 1.48 | 0 | 1.4 | 1.088 |
| 12 | 1.2 | 1.5 | 1.48 | 1.5 | 0 | 1.48 | 1.192 |
| SETPOINT. | Sensor Reading Result | ||||||
|---|---|---|---|---|---|---|---|
| SHT11 | SHT75 | ANALOG | |||||
| (°C) | (%RH) | Temp (°C) | Hum (%RH) | Temp (°C) | Hum (%RH) | Temp (°C) | Hum (%RH) |
| 30 | 55 | 30.23 | 57 | 30.09 | 56.78 | 31.7 | 60 |
| 32 | 60 | 31.99 | 61.7 | 32.08 | 60.8 | 33.5 | 64.4 |
| 34 | 70 | 34 | 70.8 | 34 | 70.5 | 34.5 | 74.1 |
| 36 | 80 | 36.01 | 81 | 36.02 | 81 | 36.2 | 76 |
| Parameter | Temperature = 34 °C | Relative Humidity = 60% RH |
|---|---|---|
| Rise Time (Tr) | 65.8 s | 4.4773 s |
| Settling Time (ts) | 111.38 | 12 s |
| Max. Overshoot | - | 7.41% |
| Peak Time (tp) | 116 s | 16 s |
| Parameter | T = 34 °C | Relative Humidity = 70% RH |
|---|---|---|
| Rise Time (Tr) | 82.02 s | 13.158 s |
| Settling Time (ts) | - | 142 s |
| Max. Overshoot | 0.26% | 5.73% |
| Peak Time (tp) | 176 s | 66 s |
| Parameter | Temperature = 34 °C | Relative Humidity = 75% RH |
|---|---|---|
| Rise Time (Tr) | 212.25 s | 19.677 s |
| Settling Time (ts) | 261 s | 186 s |
| Max. Overshoot | 0.44% | 5.42% |
| Peak Time (tp) | 255 s | 93 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alimuddin, A.; Arafiyah, R.; Saraswati, I.; Alfanz, R.; Hasudungan, P.; Taufik, T. Development and Performance Study of Temperature and Humidity Regulator in Baby Incubator Using Fuzzy-PID Hybrid Controller. Energies 2021, 14, 6505. https://doi.org/10.3390/en14206505
Alimuddin A, Arafiyah R, Saraswati I, Alfanz R, Hasudungan P, Taufik T. Development and Performance Study of Temperature and Humidity Regulator in Baby Incubator Using Fuzzy-PID Hybrid Controller. Energies. 2021; 14(20):6505. https://doi.org/10.3390/en14206505
Chicago/Turabian StyleAlimuddin, Alimuddin, Ria Arafiyah, Irma Saraswati, Rocky Alfanz, Partogi Hasudungan, and Taufik Taufik. 2021. "Development and Performance Study of Temperature and Humidity Regulator in Baby Incubator Using Fuzzy-PID Hybrid Controller" Energies 14, no. 20: 6505. https://doi.org/10.3390/en14206505