
Electric Vehicle Routing, Arc Routing, and Team Orienteering Problems in Sustainable Transportation

 ,
,  , ,
, ,  and
and 
Abstract
: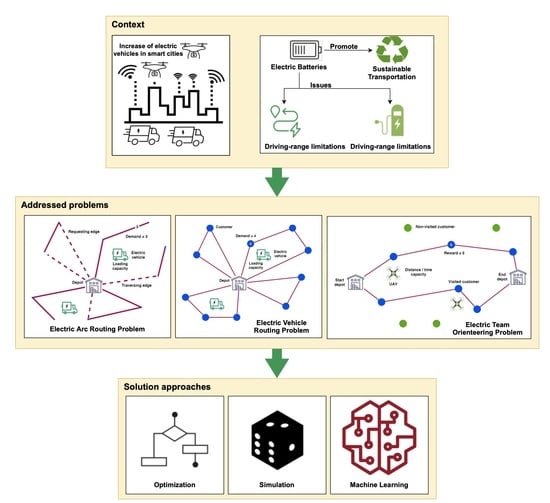
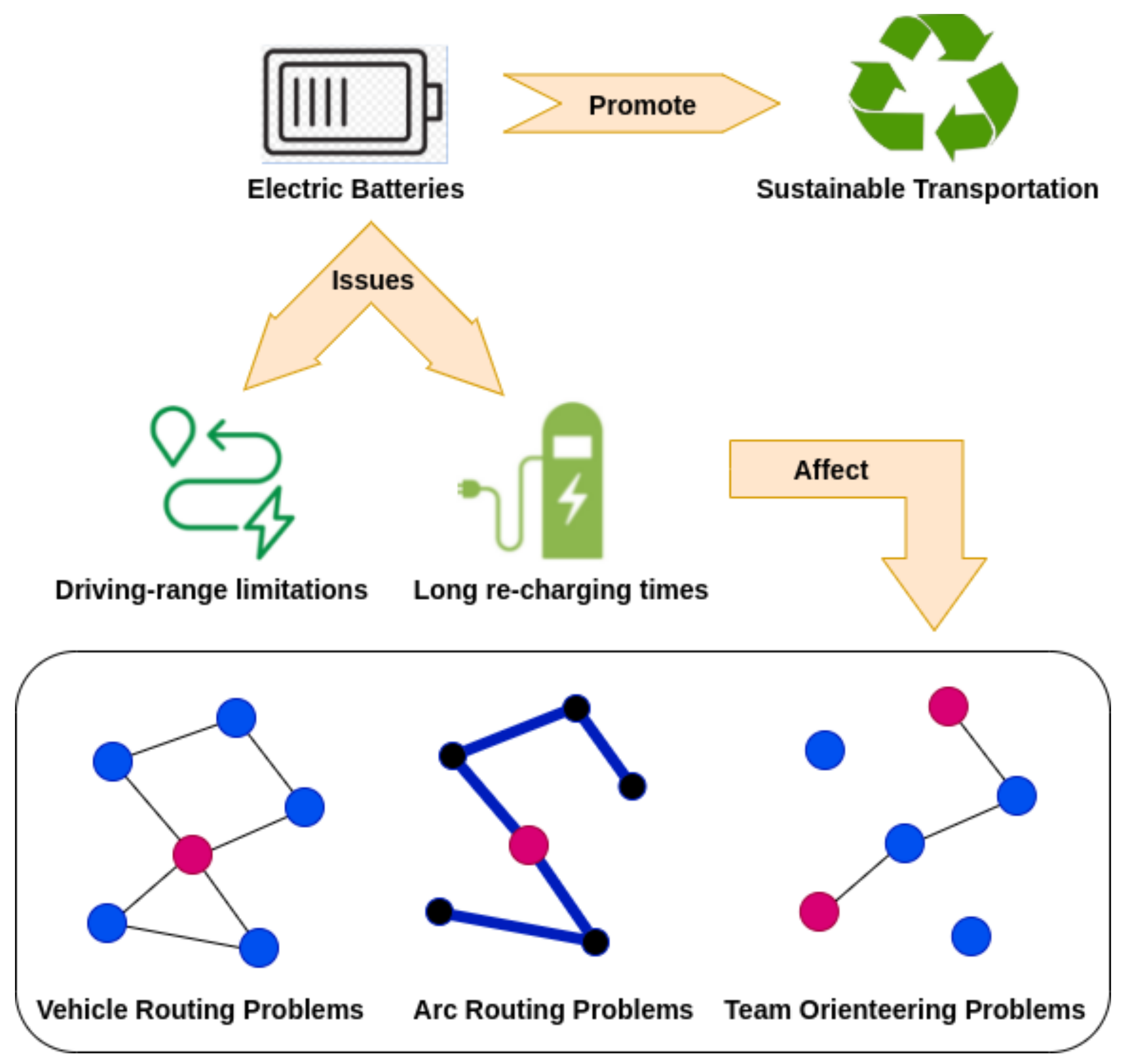
1. Introduction
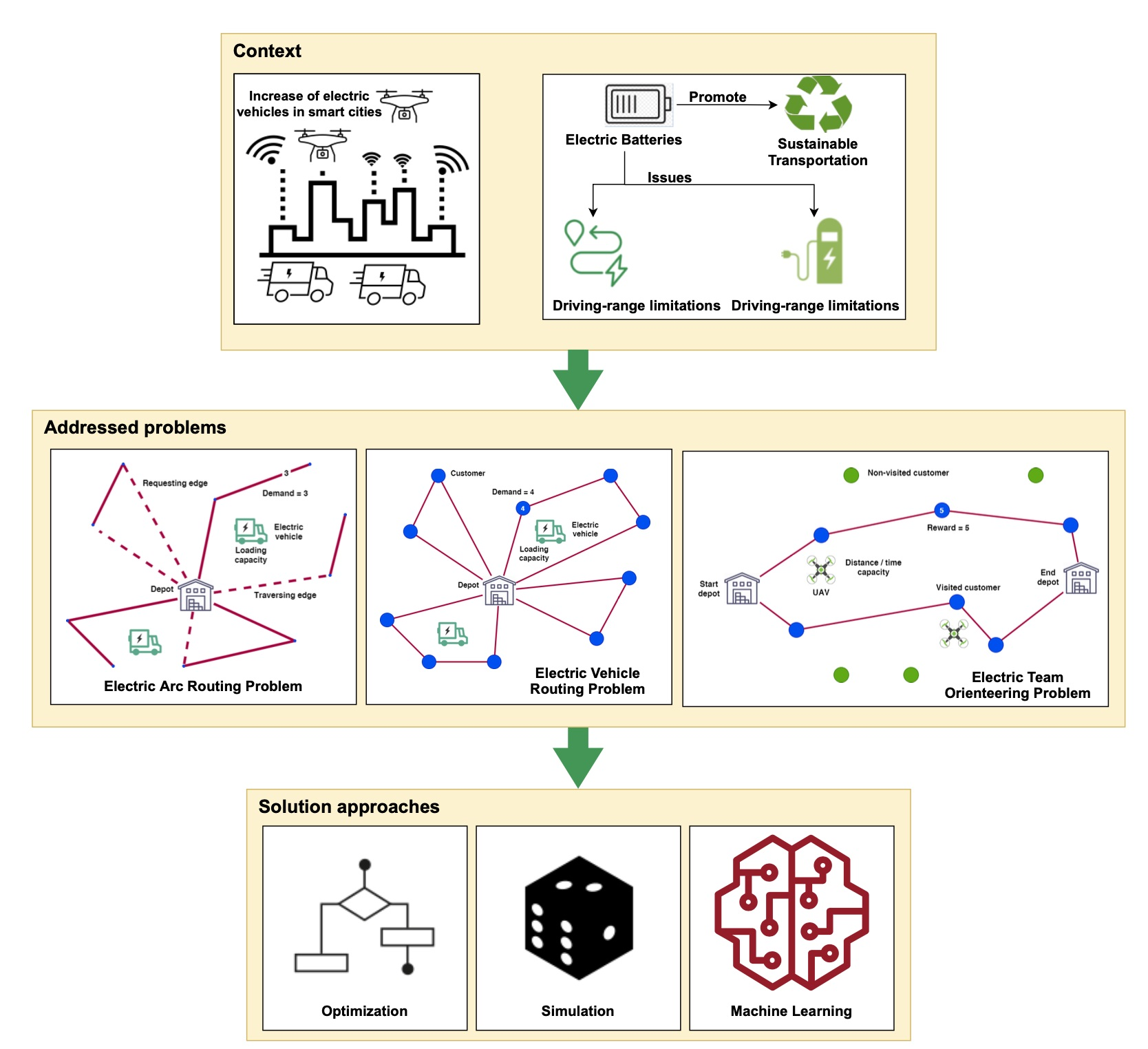
2. Promoting Sustainable Transportation Practices
3. Estimating Remaining Driving Ranges in EVs
4. Electric Vehicle Routing Problems
4.1. E-VRPs Focusing on Battery Recharge
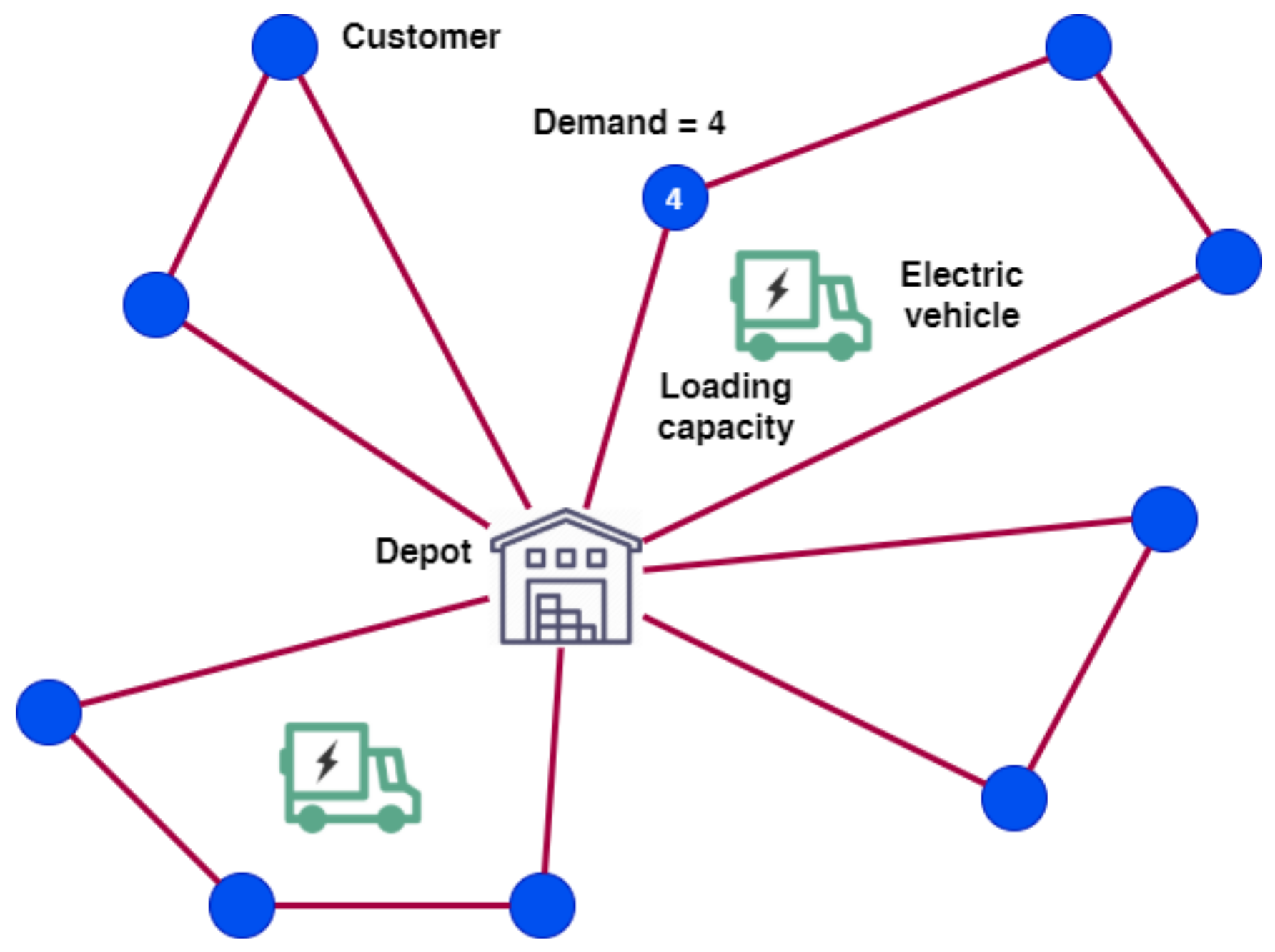
4.2. E-VRPs Focusing on Customers’ Demands
4.3. E-VRPs Focusing on Carbon Emissions and Hybrid Fleets
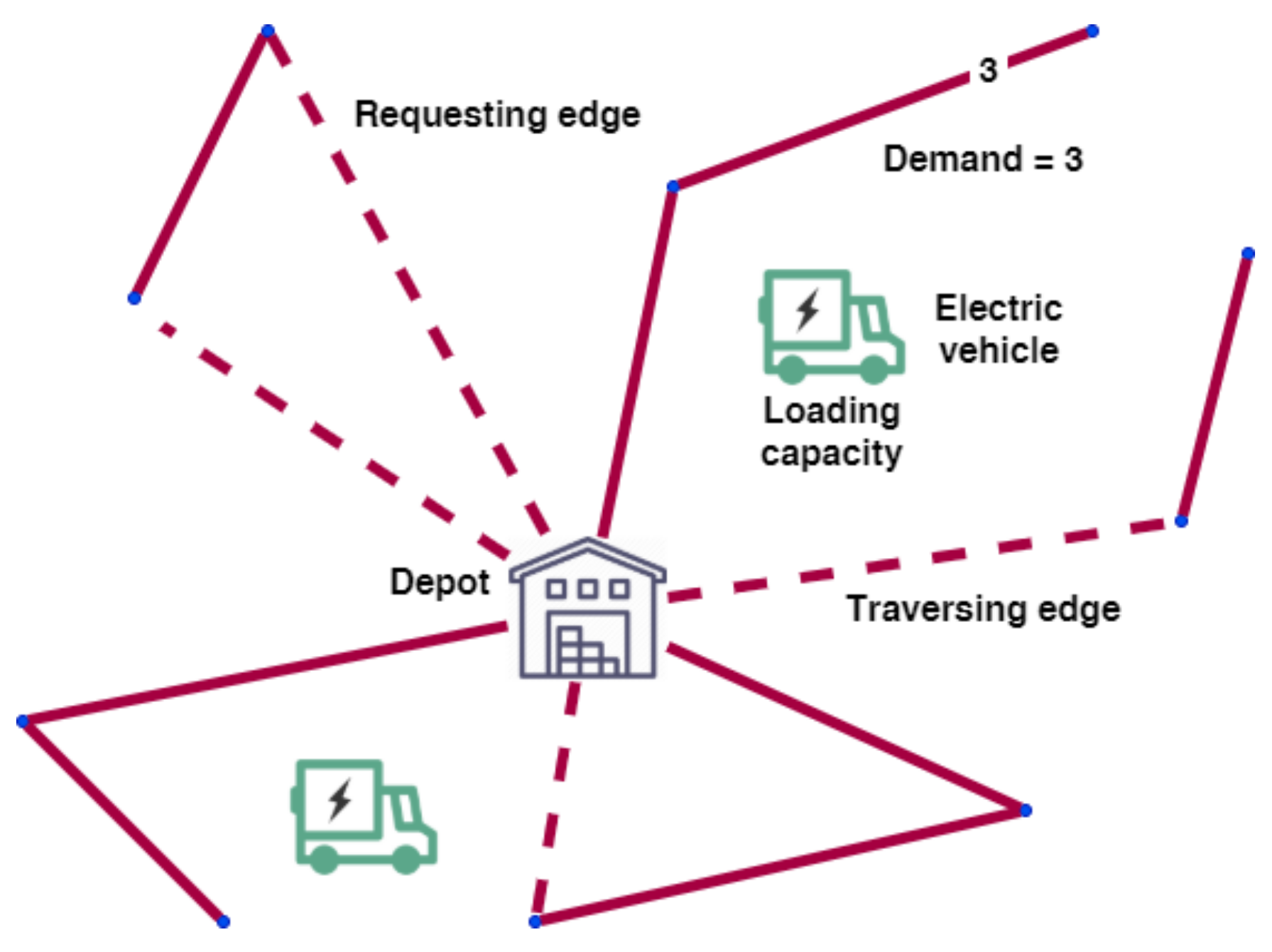
5. Electric Arc Routing Problems
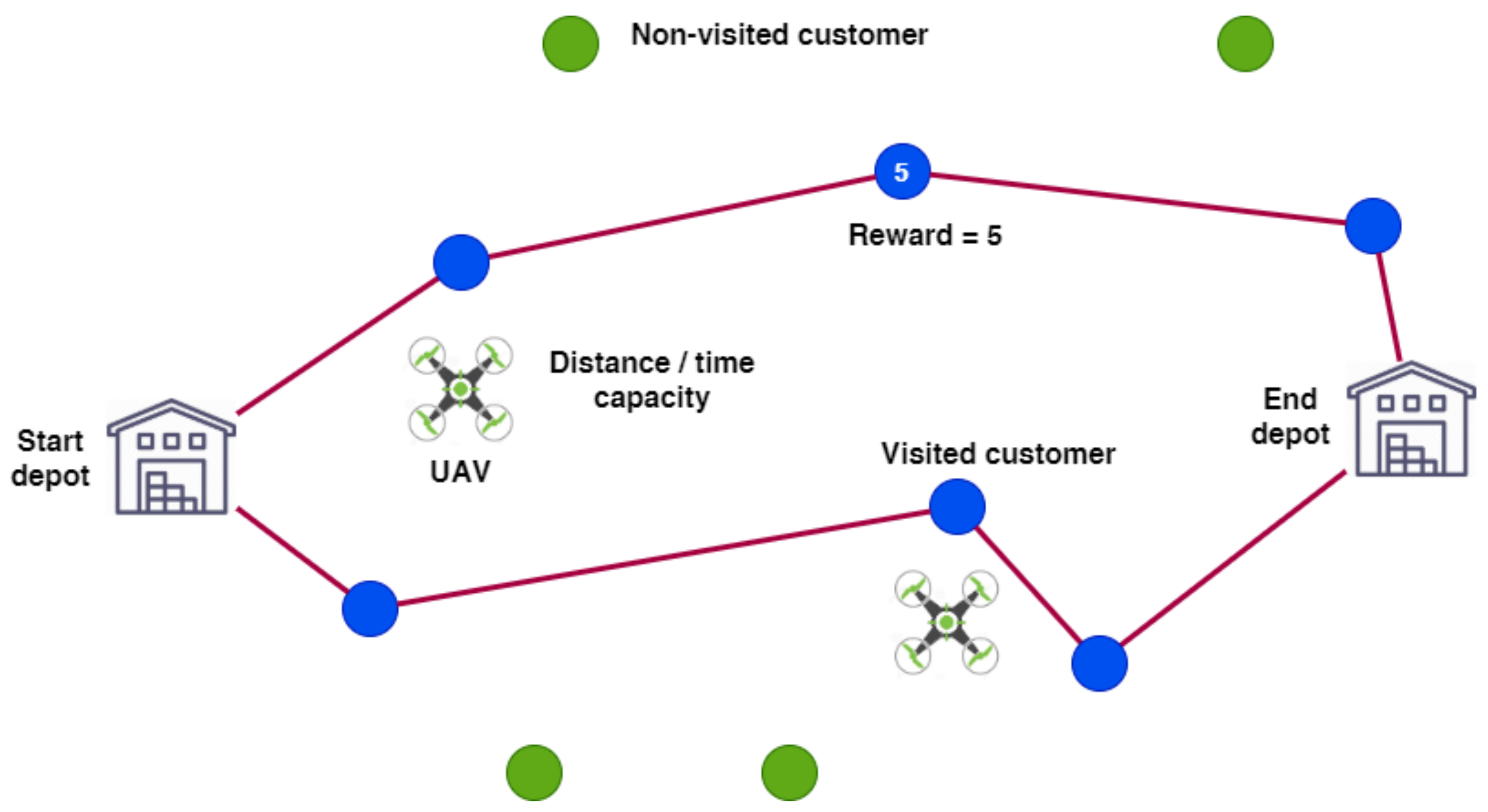
6. Electric Team Orienteering Problems
6.1. Orienteering Problems with Multiple Vehicles
6.2. Orienteering Problems with a Single Vehicle
7. Some Numerical Examples
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ruggieri, R.; Ruggeri, M.; Vinci, G.; Poponi, S. Electric Mobility in a Smart City: European Overview. Energies 2021, 14, 315. [Google Scholar] [CrossRef]
- Patella, S.M.; Grazieschi, G.; Gatta, V.; Marcucci, E.; Carrese, S. The Adoption of Green Vehicles in Last Mile Logistics: A Systematic Review. Sustainability 2021, 13, 6. [Google Scholar] [CrossRef]
- Hooftman, N.; Messagie, M.; Van Mierlo, J.; Coosemans, T. The Paris Agreement and Zero-Emission Vehicles in Europe: Scenarios for the Road Towards a Decarbonised Passenger Car Fleet. In Towards User-Centric Transport in Europe 2; Springer: Berlin/Heidelberg, Germany, 2020; pp. 151–168. [Google Scholar]
- Greene, D.L.; Park, S.; Liu, C. Public policy and the transition to electric drive vehicles in the US: The role of the zero emission vehicles mandates. Energy Strategy Rev. 2014, 5, 66–77. [Google Scholar] [CrossRef]
- Masiero, G.; Ogasavara, M.H.; Jussani, A.C.; Risso, M.L. Electric vehicles in China: BYD strategies and government subsidies. Rai Rev. Adm. Inovação 2016, 13, 3–11. [Google Scholar] [CrossRef] [Green Version]
- Kapustin, N.O.; Grushevenko, D.A. Long-term electric vehicles outlook and their potential impact on electric grid. Energy Policy 2020, 137, 111103. [Google Scholar] [CrossRef]
- Juan, A.A.; Mendez, C.A.; Faulin, J.; De Armas, J.; Grasman, S.E. Electric vehicles in logistics and transportation: A survey on emerging environmental, strategic, and operational challenges. Energies 2016, 9, 86. [Google Scholar] [CrossRef] [Green Version]
- Mukherjee, S.C.; Ryan, L. Factors influencing early battery electric vehicle adoption in Ireland. Renew. Sustain. Energy Rev. 2020, 118, 109504. [Google Scholar] [CrossRef]
- O’Neill, E.; Moore, D.; Kelleher, L.; Brereton, F. Barriers to electric vehicle uptake in Ireland: Perspectives of car-dealers and policy-makers. Case Stud. Transp. Policy 2019, 7, 118–127. [Google Scholar] [CrossRef]
- Beneicke, J.; Juan, A.A.; Xhafa, F.; Lopez-Lopez, D.; Freixes, A. Empowering citizens’ cognition and decision making in smart sustainable cities. IEEE Consum. Electron. Mag. 2019, 9, 102–108. [Google Scholar] [CrossRef]
- Mor, A.; Speranza, M.G. Vehicle routing problems over time: A survey. 4OR 2020, 1–21. [Google Scholar] [CrossRef]
- Simeonova, L.; Wassan, N.; Wassan, N.; Salhi, S. Recent Developments in Real Life Vehicle Routing Problem Applications. In Green Transportation and New Advances in Vehicle Routing Problems; Springer: Berlin/Heidelberg, Germany, 2020; pp. 213–228. [Google Scholar]
- Caceres-Cruz, J.; Arias, P.; Guimarans, D.; Riera, D.; Juan, A.A. Rich vehicle routing problem: Survey. ACM Comput. Surv. CSUR 2014, 47, 1–28. [Google Scholar] [CrossRef]
- Mourao, M.C.; Pinto, L.S. An updated annotated bibliography on arc routing problems. Networks 2017, 70, 144–194. [Google Scholar] [CrossRef]
- Corberan, A.; Eglese, R.; Hasle, G.; Plana, I.; Sanchis, J.M. Arc routing problems: A review of the past, present, and future. Networks 2021, 77, 88–115. [Google Scholar] [CrossRef]
- Bayliss, C.; Juan, A.A.; Currie, C.S.; Panadero, J. A learnheuristic approach for the team orienteering problem with aerial drone motion constraints. Appl. Soft Comput. 2020, 92, 106280. [Google Scholar] [CrossRef]
- Estrada-Moreno, A.; Ferrer, A.; Juan, A.A.; Panadero, J.; Bagirov, A. The non-smooth and bi-objective team orienteering problem with soft constraints. Mathematics 2020, 8, 1461. [Google Scholar] [CrossRef]
- Maier, H.R.; Razavi, S.; Kapelan, Z.; Matott, L.S.; Kasprzyk, J.; Tolson, B.A. Introductory overview: Optimization using evolutionary algorithms and other metaheuristics. Environ. Model. Softw. 2019, 114, 195–213. [Google Scholar] [CrossRef]
- Chica, M.; Juan, A.A.; Bayliss, C.; Cordon, O.; Kelton, W.D. Why simheuristics? Benefits, limitations, and best practices when combining metaheuristics with simulation. SORT Stat. Oper. Res. Trans. 2020, 44, 1–24. [Google Scholar] [CrossRef] [Green Version]
- Talbi, E.G. Metaheuristics: From Design to Implementation; John Wiley & Sons: Hoboken, NJ, USA, 2009; Volume 74. [Google Scholar]
- Elshaer, R.; Awad, H. A taxonomic review of metaheuristic algorithms for solving the vehicle routing problem and its variants. Comput. Ind. Eng. 2020, 140, 106242. [Google Scholar] [CrossRef]
- Yu, X.; Gen, M. Introduction to Evolutionary Algorithms; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant colony optimization. IEEE Comput. Intell. Mag. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- MirHassani, S.; Abolghasemi, N. A particle swarm optimization algorithm for open vehicle routing problem. Expert Syst. Appl. 2011, 38, 11547–11551. [Google Scholar] [CrossRef]
- Martí, R.; Resende, M.G.; Ribeiro, C.C. Multi-start methods for combinatorial optimization. Eur. J. Oper. Res. 2013, 226, 1–8. [Google Scholar] [CrossRef]
- Lourenço, H.R.; Martin, O.C.; Stützle, T. Iterated local search: Framework and applications. In Handbook of Metaheuristics; Springer: Berlin/Heidelberg, Germany, 2010; pp. 363–397. [Google Scholar]
- Hansen, P.; Mladenović, N. Variable neighborhood search. In Search Methodologies; Springer: Berlin/Heidelberg, Germany, 2014; pp. 313–337. [Google Scholar]
- Williamson, D.P.; Shmoys, D.B. The Design of Approximation Algorithms; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]
- Petersen, P.; Thorgeirsson, A.T.; Scheubner, S.; Otten, S.; Gauterin, F.; Sax, E. Training and Validation Methodology for Range Estimation Algorithms; VEHITS; SciTePress: Crete, Greece, 2019; pp. 434–443. [Google Scholar]
- Faulin, J.; Grasman, S.E.; Juan, A.A.; Hirsch, P. Sustainable Transportation: Concepts and Current Practices. In Sustainable Transportation and Smart Logistics; Elsevier: Amsterdam, The Netherlands, 2019; pp. 3–23. [Google Scholar]
- McKinnon, A.; Browne, M.; Whiteing, A.; Piecyk, M. Green Logistics: Improving the Environmental Sustainability of Logistics; Kogan Page Publishers: London, UK, 2015. [Google Scholar]
- Hensher, D.A.; Button, K.J. Handbook of Transport and the Environment; Elsevier: Amsterdam, The Netherlands, 2003; Volume 4. [Google Scholar]
- Sánchez, M.; López-Mosquera, N.; Lera-López, F.; Faulin, J. An extended planned behavior model to explain the willingness to pay to reduce noise pollution in road transportation. J. Clean. Prod. 2018, 177, 144–154. [Google Scholar] [CrossRef]
- Lera-López, F.; Faulin, J.; Sánchez, M. Determinants of the willingness-to-pay for reducing the environmental impacts of road transportation. Transp. Res. Part D Transp. Environ. 2012, 17, 215–220. [Google Scholar] [CrossRef]
- Denant-Boèmont, L.; Faulin, J.; Hammiche, S.; Serrano-Hernandez, A. Managing transportation externalities in the Pyrenees region: Measuring the willingness-to-pay for road freight noise reduction using an experimental auction mechanism. J. Clean. Prod. 2018, 202, 631–641. [Google Scholar] [CrossRef]
- Serrano-Hernández, A.; Faulin, J. Internalizing negative externalities in vehicle routing problems through green taxes and green tolls. SORT 2019, 1, 75–94. [Google Scholar]
- Lera-López, F.; Sánchez, M.; Faulin, J.; Cacciolatti, L. Rural environment stakeholders and policy making: Willingness to pay to reduce road transportation pollution impact in the Western Pyrenees. Transp. Res. Part D Transp. Environ. 2014, 32, 129–142. [Google Scholar] [CrossRef]
- Dekker, R.; Bloemhof, J.; Mallidis, I. Operations Research for green logistics—An overview of aspects, issues, contributions and challenges. Eur. J. Oper. Res. 2012, 219, 671–679. [Google Scholar] [CrossRef] [Green Version]
- Bektaş, T.; Ehmke, J.F.; Psaraftis, H.N.; Puchinger, J. The role of operational research in green freight transportation. Eur. J. Oper. Res. 2019, 274, 807–823. [Google Scholar] [CrossRef] [Green Version]
- Panagakos, G. Green corridors basics. In Green Transportation Logistics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 81–121. [Google Scholar]
- Erdoğan, S.; Miller-Hooks, E. A green vehicle routing problem. Transp. Res. Part E Logist. Transp. Rev. 2012, 48, 100–114. [Google Scholar] [CrossRef]
- Ubeda, S.; Arcelus, F.J.; Faulin, J. Green logistics at Eroski: A case study. Int. J. Prod. Econ. 2011, 131, 44–51. [Google Scholar] [CrossRef]
- Lin, C.; Choy, K.L.; Ho, G.T.; Chung, S.H.; Lam, H. Survey of green vehicle routing problem: Past and future trends. Expert Syst. Appl. 2014, 41, 1118–1138. [Google Scholar] [CrossRef]
- Ren, R.; Hu, W.; Dong, J.; Sun, B.; Chen, Y.; Chen, Z. A systematic literature review of green and sustainable logistics: Bibliometric analysis, research trend and knowledge taxonomy. Int. J. Environ. Res. Public Health 2020, 17, 261. [Google Scholar] [CrossRef] [Green Version]
- Moghdani, R.; Salimifard, K.; Demir, E.; Benyettou, A. The green vehicle routing problem: A systematic literature review. J. Clean. Prod. 2020, 279, 123691. [Google Scholar] [CrossRef]
- Asghari, M.; Mirzapour Al-e-hashem, S.M.J. Green vehicle routing problem: A state-of-the-art review. Int. J. Prod. Econ. 2020, 231, 107899. [Google Scholar] [CrossRef]
- Sawik, B.; Faulin, J.; Pérez-Bernabeu, E. Multi-criteria optimization for fleet size with environmental aspects. Transp. Res. Procedia 2017, 27, 61–68. [Google Scholar] [CrossRef]
- Serrano-Hernández, A.; Juan, A.A.; Faulin, J.; Perez-Bernabeu, E. Horizontal collaboration in freight transport: Concepts, benefits and environmental challenges. SORT 2017, 1, 393–414. [Google Scholar]
- Serrano-Hernandez, A.; Faulin, J.; Hirsch, P.; Fikar, C. Agent-based simulation for horizontal cooperation in logistics and transportation: From the individual to the grand coalition. Simul. Model. Pract. Theory 2018, 85, 47–59. [Google Scholar] [CrossRef]
- Quintero-Araujo, C.L.; Gruler, A.; Juan, A.A.; Faulin, J. Using horizontal cooperation concepts in integrated routing and facility-location decisions. Int. Trans. Oper. Res. 2019, 26, 551–576. [Google Scholar] [CrossRef]
- Santos, M.J.; Amorim, P.; Marques, A.; Carvalho, A.; Póvoa, A. The vehicle routing problem with backhauls towards a sustainability perspective: A review. TOP 2019, 28, 358–401. [Google Scholar] [CrossRef]
- Belloso, J.; Juan, A.A.; Faulin, J. An iterative biased-randomized heuristic for the fleet size and mix vehicle-routing problem with backhauls. Int. Trans. Oper. Res. 2019, 26, 289–301. [Google Scholar] [CrossRef] [Green Version]
- Serrano-Hernandez, A.; de la Torre, R.; Cadarso, L.; Faulin, J. Urban e-Grocery Distribution Design in Pamplona (Spain) Applying an Agent-Based Simulation Model with Horizontal Cooperation Scenarios. Algorithms 2021, 14, 20. [Google Scholar] [CrossRef]
- Archetti, C.; Savelsbergh, M.; Speranza, M.G. The vehicle routing problem with occasional drivers. Eur. J. Oper. Res. 2016, 254, 472–480. [Google Scholar] [CrossRef]
- Sampaio, A.; Savelsbergh, M.; Veelenturf, L.; Van Woensel, T. Crowd-based city logistics. In Sustainable Transportation and Smart Logistics; Elsevier: Amsterdam, The Netherlands, 2019; pp. 381–400. [Google Scholar]
- McKinnon, A. Crowdshipping: A Communal Approach to Reducing Urban Traffic Levels? Kühne Logistics University: Hamburg, Germany, 2016. [Google Scholar]
- Lloyd, J.; McCarney, S.; Ouhichi, R.; Lydon, P.; Zaffran, M. Optimizing energy for a ‘green’ vaccine supply chain. Vaccine 2015, 33, 908–913. [Google Scholar] [CrossRef] [Green Version]
- Kuo, J.C.; Chen, M.C. Developing an advanced multi-temperature joint distribution system for the food cold chain. Food Control 2010, 21, 559–566. [Google Scholar] [CrossRef]
- Mercier, S.; Villeneuve, S.; Mondor, M.; Uysal, I. Time–temperature management along the food cold chain: A review of recent developments. Compr. Rev. Food Sci. Food Saf. 2017, 16, 647–667. [Google Scholar] [CrossRef] [PubMed]
- Deloison, T.; Hannon, E.; Huber, A.; Heid, B.; Klink, C.; Sahay, R.; Wolff, C. The Future of the Last-Mile Ecosystem; World Economic Forum: Geneva, Switzerland, 2020. [Google Scholar]
- Ostermeier, M.; Heimfarth, A.; Hübner, A. Cost-optimal truck-and-robot routing for last-mile delivery. Networks 2021, 1–26. [Google Scholar] [CrossRef]
- Del Vecchio, P.; Secundo, G.; Maruccia, Y.; Passiante, G. A system dynamic approach for the smart mobility of people: Implications in the age of big data. Technol. Forecast. Soc. Chang. 2019, 149, 119771. [Google Scholar] [CrossRef]
- Roumboutsos, A.; Kapros, S.; Vanelslander, T. Green city logistics: Systems of Innovation to assess the potential of E-vehicles. Res. Transp. Bus. Manag. 2014, 11, 43–52. [Google Scholar] [CrossRef]
- Demir, E.; Bektaş, T.; Laporte, G. A review of recent research on green road freight transportation. Eur. J. Oper. Res. 2014, 237, 775–793. [Google Scholar] [CrossRef] [Green Version]
- Meyer, T. Decarbonizing road freight transportation—A bibliometric and network analysis. Transp. Res. Part D Transp. Environ. 2020, 89, 102619. [Google Scholar] [CrossRef]
- Ehrler, V.C.; Schöder, D.; Seidel, S. Challenges and perspectives for the use of electric vehicles for last mile logistics of grocery e-commerce–Findings from case studies in Germany. Res. Transp. Econ. 2019, 87, 100757. [Google Scholar] [CrossRef]
- Muñoz-Villamizar, A.; Montoya-Torres, J.R.; Faulin, J. Impact of the use of electric vehicles in collaborative urban transport networks: A case study. Transp. Res. Part D Transp. Environ. 2017, 50, 40–54. [Google Scholar] [CrossRef]
- Catenacci, M.; Fiorese, G.; Verdolini, E.; Bosetti, V. Going electric: Expert survey on the future of battery technologies for electric vehicles. In Innovation under Uncertainty; Edward Elgar Publishing: Cheltenham, UK, 2015. [Google Scholar]
- Vaz, W.; Nandi, A.K.; Landers, R.G.; Koylu, U.O. Electric vehicle range prediction for constant speed trip using multi-objective optimization. J. Power Sources 2015, 275, 435–446. [Google Scholar] [CrossRef]
- Zhou, Y.; Wen, R.; Wang, H.; Cai, H. Optimal battery electric vehicles range: A study considering heterogeneous travel patterns, charging behaviors, and access to charging infrastructure. Energy 2020, 197, 116945. [Google Scholar] [CrossRef]
- Funke, S.Á.; Sprei, F.; Gnann, T.; Plötz, P. How much charging infrastructure do electric vehicles need? A review of the evidence and international comparison. Transp. Res. Part D Transp. Environ. 2019, 77, 224–242. [Google Scholar] [CrossRef]
- Baek, D.; Chen, Y.; Bocca, A.; Bottaccioli, L.; Di Cataldo, S.; Gatteschi, V.; Pagliari, D.J.; Patti, E.; Urgese, G.; Chang, N.; et al. Battery-aware operation range estimation for terrestrial and aerial electric vehicles. IEEE Trans. Veh. Technol. 2019, 68, 5471–5482. [Google Scholar] [CrossRef]
- Kim, S.; Lee, J.; Lee, C. Does driving range of electric vehicles influence electric vehicle adoption? Sustainability 2017, 9, 1783. [Google Scholar] [CrossRef] [Green Version]
- Malik, M.; Dincer, I.; Rosen, M.A. Review on use of phase change materials in battery thermal management for electric and hybrid electric vehicles. Int. J. Energy Res. 2016, 40, 1011–1031. [Google Scholar] [CrossRef]
- Liu, K.; Li, K.; Peng, Q.; Zhang, C. A brief review on key technologies in the battery management system of electric vehicles. Front. Mech. Eng. 2019, 14, 47–64. [Google Scholar] [CrossRef] [Green Version]
- Lipu, M.H.; Hannan, M.; Karim, T.F.; Hussain, A.; Saad, M.H.; Ayob, A.; Miah, M.S.; Mahlia, T. Intelligent algorithms and control strategies for battery management system in electric vehicles: Progress, challenges and future outlook. J. Clean. Prod. 2021, 292, 126044. [Google Scholar] [CrossRef]
- Shi, X.; Pan, J.; Wang, H.; Cai, H. Battery electric vehicles: What is the minimum range required? Energy 2019, 166, 352–358. [Google Scholar] [CrossRef]
- Bi, J.; Wang, Y.; Shao, S.; Cheng, Y. Residual range estimation for battery electric vehicle based on radial basis function neural network. Measurement 2018, 128, 197–203. [Google Scholar] [CrossRef]
- Bi, J.; Wang, Y.; Sai, Q.; Ding, C. Estimating remaining driving range of battery electric vehicles based on real-world data: A case study of Beijing, China. Energy 2019, 169, 833–843. [Google Scholar] [CrossRef]
- Fetene, G.M.; Kaplan, S.; Mabit, S.L.; Jensen, A.F.; Prato, C.G. Harnessing big data for estimating the energy consumption and driving range of electric vehicles. Transp. Res. Part D Transp. Environ. 2017, 54, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Fiori, C.; Ahn, K.; Rakha, H.A. Optimum routing of battery electric vehicles: Insights using empirical data and microsimulation. Transp. Res. Part D Transp. Environ. 2018, 64, 262–272. [Google Scholar] [CrossRef]
- Kempton, W. Electric vehicles: Driving range. Nat. Energy 2016, 1, 1–2. [Google Scholar] [CrossRef]
- Neaimeh, M.; Hill, G.A.; Hübner, Y.; Blythe, P.T. Routing systems to extend the driving range of electric vehicles. IET Intell. Transp. Syst. 2013, 7, 327–336. [Google Scholar] [CrossRef] [Green Version]
- Sautermeister, S.; Ott, F.; Vaillant, M.; Gauterin, F. Reducing range estimation uncertainty with a hybrid powertrain model and online parameter estimation. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; IEEE: New York, NY, USA, 2017; pp. 1–6. [Google Scholar]
- Zhao, L.; Yao, W.; Wang, Y.; Hu, J. Machine Learning-Based Method for Remaining Range Prediction of Electric Vehicles. IEEE Access 2020, 8, 212423–212441. [Google Scholar] [CrossRef]
- Zheng, B.; He, P.; Zhao, L.; Li, H. A hybrid machine learning model for range estimation of electric vehicles. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; IEEE: New York, NY, USA, 2016; pp. 1–6. [Google Scholar]
- Thorgeirsson, A.T.; Vaillant, M.; Scheubner, S.; Gauterin, F. Evaluating system architectures for driving range estimation and charge planning for electric vehicles. Softw. Pract. Exp. 2021, 51, 72–90. [Google Scholar] [CrossRef]
- Ghorbani, E.; Alinaghian, M.; Gharehpetian, G.; Mohammadi, S.; Perboli, G. A Survey on Environmentally Friendly Vehicle Routing Problem and a Proposal of Its Classification. Sustainability 2020, 12, 9079. [Google Scholar] [CrossRef]
- Lin, J.; Zhou, W.; Wolfson, O. Electric vehicle routing problem. Transp. Res. Procedia 2016, 12, 508–521. [Google Scholar] [CrossRef] [Green Version]
- Conrad, R.G.; Figliozzi, M.A. The recharging vehicle routing problem. In Proceedings of the 2011 Industrial Engineering Research Conference, IISE, Reno, NV, USA, 21–25 May 2011; p. 8. [Google Scholar]
- Juan, A.A.; Goentzel, J.; Bektaş, T. Routing fleets with multiple driving ranges: Is it possible to use greener fleet configurations? Appl. Soft Comput. 2014, 21, 84–94. [Google Scholar] [CrossRef]
- Dominguez, O.; Juan, A.A.; Faulin, J. A biased-randomized algorithm for the two-dimensional vehicle routing problem with and without item rotations. Int. Trans. Oper. Res. 2014, 21, 375–398. [Google Scholar] [CrossRef]
- Quintero-Araujo, C.L.; Caballero-Villalobos, J.P.; Juan, A.A.; Montoya-Torres, J.R. A biased-randomized metaheuristic for the capacitated location routing problem. Int. Trans. Oper. Res. 2017, 24, 1079–1098. [Google Scholar] [CrossRef]
- Afroditi, A.; Boile, M.; Theofanis, S.; Sdoukopoulos, E.; Margaritis, D. Electric vehicle routing problem with industry constraints: Trends and insights for future research. Transp. Res. Procedia 2014, 3, 452–459. [Google Scholar] [CrossRef] [Green Version]
- Schneider, M.; Stenger, A.; Goeke, D. The electric vehicle-routing problem with time windows and recharging stations. Transp. Sci. 2014, 48, 500–520. [Google Scholar] [CrossRef]
- Schiffer, M.; Walther, G. The electric location routing problem with time windows and partial recharging. Eur. J. Oper. Res. 2017, 260, 995–1013. [Google Scholar] [CrossRef]
- Zhou, Y.; Chen, L.; Yang, Y.; Li, Y.; Cheng, G.; Fu, Y.; Zhu, C.; Liu, Y.; Mao, H. Electric vehicle routing problem: Model and algorithm. In Proceedings of the 2020 12th International Conference on Measuring Technology and Mechatronics Automation (ICMTMA), Phuket, Thailand, 28–29 February 2020; IEEE: New York, NY, USA, 2020; pp. 1049–1054. [Google Scholar]
- Erdelić, T.; Carić, T. A survey on the electric vehicle routing problem: Variants and solution approaches. J. Adv. Transp. 2019, 2019, 5075671. [Google Scholar] [CrossRef]
- Li, H.; Li, Z.; Cao, L.; Wang, R.; Ren, M. Research on Optimization of Electric Vehicle Routing Problem with Time Window. IEEE Access 2020, 8, 146707–146718. [Google Scholar] [CrossRef]
- Zhao, C.; Shi, H. Large-Scale Electric Vehicle Route Optimization Based on Adaptive Variable Neighborhood Search. Huadong Ligong Daxue Xuebao J. East China Univ. Sci. Technol. 2020, 46, 694–701. [Google Scholar]
- Zhu, Y.; Lee, K.; Wang, Y. Adaptive Elitist Genetic Algorithm with Improved Neighbor Routing Initialization for Electric Vehicle Routing Problems. IEEE Access 2021, 9, 16661–16671. [Google Scholar] [CrossRef]
- Outalha, A.; Lakhal, Y.; Baghli, F.; Kzaiber, F. Electric vehicle routing problem using timed Petri nets and optimization algorithm. J. Adv. Res. Dyn. Control Syst. 2020, 12, 1109–1115. [Google Scholar] [CrossRef]
- Li, Y.; Lim, M.; Tan, Y.; Lee, S.; Tseng, M.L. Sharing economy to improve routing for urban logistics distribution using electric vehicles. Resour. Conserv. Recycl. 2020, 153, 104585. [Google Scholar] [CrossRef]
- Zhang, S.; Chen, M.; Zhang, W.; Zhuang, X. Fuzzy optimization model for electric vehicle routing problem with time windows and recharging stations. Expert Syst. Appl. 2020, 145, 113123. [Google Scholar] [CrossRef]
- Zhen, L.; Xu, Z.; Ma, C.; Xiao, L. Hybrid electric vehicle routing problem with mode selection. Int. J. Prod. Res. 2020, 58, 562–576. [Google Scholar] [CrossRef]
- Keskin, M.; Çatay, B.; Laporte, G. A simulation-based heuristic for the electric vehicle routing problem with time windows and stochastic waiting times at recharging stations. Comput. Oper. Res. 2021, 125, 105060. [Google Scholar] [CrossRef]
- Bahrami, S.; Nourinejad, M.; Amirjamshidi, G.; Roorda, M. The Plugin Hybrid Electric Vehicle routing problem: A power-management strategy model. Transp. Res. Part C: Emerg. Technol. 2020, 111, 318–333. [Google Scholar] [CrossRef]
- Zhu, X.; Yan, R.; Huang, Z.; Wei, W.; Yang, J.; Kudratova, S. Logistic Optimization for Multi Depots Loading Capacitated Electric Vehicle Routing Problem from Low Carbon Perspective. IEEE Access 2020, 8, 31934–31947. [Google Scholar] [CrossRef]
- Kancharla, S.R.; Ramadurai, G. Electric vehicle routing problem with non-linear charging and load-dependent discharging. Expert Syst. Appl. 2020, 160, 113714. [Google Scholar] [CrossRef]
- Mao, H.; Shi, J.; Zhou, Y.; Zhang, G. The Electric Vehicle Routing Problem With Time Windows and Multiple Recharging Options. IEEE Access 2020, 8, 114864–114875. [Google Scholar] [CrossRef]
- Lu, J.; Chen, Y.; Hao, J.K.; He, R. The Time-dependent Electric Vehicle Routing Problem: Model and solution. Expert Syst. Appl. 2020, 161, 113593. [Google Scholar] [CrossRef]
- Raeesi, R.; Zografos, K.G. The electric vehicle routing problem with time windows and synchronised mobile battery swapping. Transp. Res. Part B Methodol. 2020, 140, 101–129. [Google Scholar] [CrossRef]
- Li, X.; Shi, X.; Zhao, Y.; Liang, H.; Dong, Y. SVND enhanced metaheuristic for plug-in hybrid electric vehicle routing problem. Appl. Sci. 2020, 10, 441. [Google Scholar] [CrossRef] [Green Version]
- Karakatič, S. Optimizing nonlinear charging times of electric vehicle routing with genetic algorithm. Expert Syst. Appl. 2021, 164, 114039. [Google Scholar] [CrossRef]
- Li, J.; Wang, F.; He, Y. Electric vehicle routing problem with battery swapping considering energy consumption and carbon emissions. Sustainability 2020, 12, 10537. [Google Scholar] [CrossRef]
- Granada-Echeverri, M.; Cubides, L.; Bustamante, J. The electric vehicle routing problem with backuals. Int. J. Ind. Eng. Comput. 2020, 11, 131–152. [Google Scholar]
- Löffler, M.; Desaulniers, G.; Irnich, S.; Schneider, M. Routing electric vehicles with a single recharge per route. Networks 2020, 76, 187–205. [Google Scholar] [CrossRef]
- Lee, C. An exact algorithm for the electric-vehicle routing problem with nonlinear charging time. J. Oper. Res. Soc. 2020, 72, 1461–1485. [Google Scholar] [CrossRef]
- Al Theeb, N.; Hayajneh, M.; AL Qubelat, N. Optimization of logistic plans with adopting the green technology considerations by utilizing electric vehicle routing problem. Ind. Eng. Manag. Syst. 2021, 19, 774–789. [Google Scholar]
- Lin, J.; Zhou, W. Important factors to daily vehicle routing cost of battery electric delivery trucks. Int. J. Sustain. Transp. 2021, 15, 541–558. [Google Scholar] [CrossRef]
- Taş, D. Electric vehicle routing with flexible time windows: A column generation solution approach. Transp. Lett. 2021, 13, 97–103. [Google Scholar] [CrossRef]
- Zhao, Z.X.; Li, X.M. Electric Vehicle Route Optimization for Fresh Logistics Distribution Based on Time-varying Traffic Congestion. Jiaotong Yunshu Xitong Gongcheng Yu Xinxi J. Transp. Syst. Eng. Inf. Technol. 2020, 20, 218–225. [Google Scholar]
- Hulagu, S.; Celikoglu, H. An electric vehicle routing problem with intermediate nodes for shuttle fleets. IEEE Trans. Intell. Transp. Syst. 2020, 1–13. [Google Scholar] [CrossRef]
- Zhao, Z.; Li, X.; Zhou, X. Distribution route optimization for electric vehicles in urban cold chain logistics for fresh products under time-varying traffic conditions. Math. Probl. Eng. 2020, 2020, 9864935. [Google Scholar] [CrossRef]
- Yang, S.; Ning, L.; Tong, L.; Shang, P. Optimizing electric vehicle routing problems with mixed backhauls and recharging strategies in multi-dimensional representation network. Expert Syst. Appl. 2021, 176, 114804. [Google Scholar] [CrossRef]
- Bac, U.; Erdem, M. Optimization of electric vehicle recharge schedule and routing problem with time windows and partial recharge: A comparative study for an urban logistics fleet. Sustain. Cities Soc. 2021, 70, 102883. [Google Scholar] [CrossRef]
- Yu, V.; Jodiawan, P.; Gunawan, A. An Adaptive Large Neighborhood Search for the green mixed fleet vehicle routing problem with realistic energy consumption and partial recharges. Appl. Soft Comput. 2021, 105, 107251. [Google Scholar] [CrossRef]
- Li, D.; Chen, Y.; Zhang, Z. A branch-and-price algorithm for electric vehicle routing problem with time windows and mixed fleet. Xitong Gongcheng Lilun Yu Shijian Syst. Eng. Theory Pract. 2021, 41, 995–1009. [Google Scholar]
- Yindong, S.; Liwen, P.; Jingpeng, L. An improved estimation of distribution algorithm for multi-compartment electric vehicle routing problem. J. Syst. Eng. Electron. 2021, 32, 365–379. [Google Scholar] [CrossRef]
- Basso, R.; Kulcsár, B.; Sanchez-Diaz, I. Electric vehicle routing problem with machine learning for energy prediction. Transp. Res. Part B Methodol. 2021, 145, 24–55. [Google Scholar] [CrossRef]
- Jia, Y.; Mei, Y.; Zhang, M. A Bilevel Ant Colony Optimization Algorithm for Capacitated Electric Vehicle Routing Problem. IEEE Trans. Cybern. 2021, 1–14. [Google Scholar] [CrossRef]
- Wang, N.; Sun, Y.; Wang, H. An Adaptive Memetic Algorithm for Dynamic Electric Vehicle Routing Problem with Time-Varying Demands. Math. Probl. Eng. 2021, 2021, 6635749. [Google Scholar]
- Deng, J.; Li, J.; Li, C.; Han, Y.; Liu, Q.; Niu, B.; Liu, L.; Zhang, B. A hybrid algorithm for electric vehicle routing problem with nonlinear charging. J. Intell. Fuzzy Syst. 2021, 40, 5383–5402. [Google Scholar] [CrossRef]
- Ham, A.; Park, M.J. Electric vehicle route optimization under time-of-use electricity pricing. IEEE Access 2021, 9, 37220–37228. [Google Scholar] [CrossRef]
- Florio, A.; Absi, N.; Feillet, D. Routing electric vehicles on congested street networks. Transp. Sci. 2021, 55, 238–256. [Google Scholar] [CrossRef]
- Park, H.; Jin, S. Electric Vehicle Routing Problem with Heterogeneous Vehicles and Partial Charge. Int. J. Ind. Eng. Manag. 2020, 11, 215–225. [Google Scholar] [CrossRef]
- Ferro, G.; Paolucci, M.; Robba, M. Optimal Charging and Routing of Electric Vehicles with Power Constraints and Time-of-Use Energy Prices. IEEE Trans. Veh. Technol. 2020, 69, 14436–14447. [Google Scholar] [CrossRef]
- Ge, X.; Zhu, Z.; Jin, Y. Electric Vehicle Routing Problems with Stochastic Demands and Dynamic Remedial Measures. Math. Probl. Eng. 2020, 2020, 1–15. [Google Scholar]
- Wang, L.; Gao, S.; Wang, K.; Li, T.; Li, L.; Chen, Z. Time-Dependent Electric Vehicle Routing Problem with Time Windows and Path Flexibility. J. Adv. Transp. 2020, 2020, 3030197. [Google Scholar] [CrossRef]
- Keskin, M.; Çatay, B. Partial recharge strategies for the electric vehicle routing problem with time windows. Transp. Res. Part C Emerg. Technol. 2016, 65, 111–127. [Google Scholar] [CrossRef]
- Verma, A. Electric vehicle routing problem with time windows, recharging stations and battery swapping stations. EURO J. Transp. Logist. 2018, 7, 415–451. [Google Scholar] [CrossRef]
- Zhao, M.; Lu, Y. A heuristic approach for a real-world electric vehicle routing problem. Algorithms 2019, 12, 45. [Google Scholar] [CrossRef] [Green Version]
- Eskandarpour, M.; Ouelhadj, D.; Hatami, S.; Juan, A.A.; Khosravi, B. Enhanced multi-directional local search for the bi-objective heterogeneous vehicle routing problem with multiple driving ranges. Eur. J. Oper. Res. 2019, 277, 479–491. [Google Scholar] [CrossRef]
- Hatami, S.; Eskandarpour, M.; Chica, M.; Juan, A.A.; Ouelhadj, D. Green hybrid fleets using electric vehicles: Solving the heterogeneous vehicle routing problem with multiple driving ranges and loading capacities. SORT Stat. Oper. Res. Trans. 2020, 44, 141–170. [Google Scholar]
- Hiermann, G.; Puchinger, J.; Ropke, S.; Hartl, R.F. The electric fleet size and mix vehicle routing problem with time windows and recharging stations. Eur. J. Oper. Res. 2016, 252, 995–1018. [Google Scholar] [CrossRef] [Green Version]
- Cussigh, M.; Löchel, C.; Straub, T.; Hamacher, T. Assessing Time-Optimal Journeys: Combined Routing, Charging and Velocity Strategies for Electric Vehicles. In Proceedings of the 2020 Forum on Integrated and Sustainable Transportation Systems (FISTS), Delft, The Netherlands, 3–5 November 2020; IEEE: New York, NY, USA, 2020; pp. 51–57. [Google Scholar]
- Desaulniers, G.; Errico, F.; Irnich, S.; Schneider, M. Exact algorithms for electric vehicle-routing problems with time windows. Oper. Res. 2016, 64, 1388–1405. [Google Scholar] [CrossRef]
- Sweda, T.M.; Dolinskaya, I.S.; Klabjan, D. Adaptive routing and recharging policies for electric vehicles. Transp. Sci. 2017, 51, 1326–1348. [Google Scholar] [CrossRef]
- Froger, A.; Mendoza, J.E.; Jabali, O.; Laporte, G. A Matheuristic for the Electric Vehicle Routing Problem with Capacitated Charging Stations. Ph.D. Thesis, Centre Interuniversitaire de Recherche Sur Les Reseaux D’entreprise, Montreal, QC, Canada, 2017. [Google Scholar]
- Montoya, A.; Guéret, C.; Mendoza, J.E.; Villegas, J.G. The electric vehicle routing problem with nonlinear charging function. Transp. Res. Part B Methodol. 2017, 103, 87–110. [Google Scholar] [CrossRef] [Green Version]
- Caggiani, L.; Colovic, A.; Prencipe, L.P.; Ottomanelli, M. A green logistics solution for last-mile deliveries considering e-vans and e-cargo bikes. Transp. Res. Procedia 2021, 52, 75–82. [Google Scholar] [CrossRef]
- Yurtseven, C.; Gökçe, M.A. A Novel Arc-routing Problem of Electric Powered Street Sweepers with Time Windows and Intermediate Stops. IFAC-PapersOnLine 2019, 52, 2308–2313. [Google Scholar] [CrossRef]
- Campbell, J.F.; Corberán, Á.; Plana, I.; Sanchis, J.M.; Segura, P. Solving the length constrained K-drones rural postman problem. Eur. J. Oper. Res. 2020, 292, 60–72. [Google Scholar] [CrossRef]
- Campbell, J.F.; Corberán, Á.; Plana, I.; Sanchis, J.M. Drone arc routing problems. Networks 2018, 72, 543–559. [Google Scholar] [CrossRef] [Green Version]
- Chow, J.Y. Dynamic UAV-based traffic monitoring under uncertainty as a stochastic arc-inventory routing policy. Int. J. Transp. Sci. Technol. 2016, 5, 167–185. [Google Scholar] [CrossRef]
- Li, M.; Zhen, L.; Wang, S.; Lv, W.; Qu, X. Unmanned aerial vehicle scheduling problem for traffic monitoring. Comput. Ind. Eng. 2018, 122, 15–23. [Google Scholar] [CrossRef]
- Liu, Y.; Shi, J.; Liu, Z.; Huang, J.; Zhou, T. Two-layer routing for high-voltage powerline inspection by cooperated ground vehicle and drone. Energies 2019, 12, 1385. [Google Scholar] [CrossRef] [Green Version]
- Luo, H.; Zhang, P.; Wang, J.; Wang, G.; Meng, F. Traffic patrolling routing problem with drones in an urban road system. Sensors 2019, 19, 5164. [Google Scholar] [CrossRef] [Green Version]
- Poikonen, S.; Campbell, J.F. Future directions in drone routing research. Networks 2021, 77, 116–126. [Google Scholar] [CrossRef]
- Donateo, T.; Ficarella, A.; Spedicato, L.; Arista, A.; Ferraro, M. A new approach to calculating endurance in electric flight and comparing fuel cells and batteries. Appl. Energy 2017, 187, 807–819. [Google Scholar] [CrossRef]
- Fotouhi, A.; Qiang, H.; Ding, M.; Hassan, M.; Giordano, L.G.; Garcia-Rodriguez, A.; Yuan, J. Survey on UAV cellular communications: Practical aspects, standardization advancements, regulation, and security challenges. IEEE Commun. Surv. Tutor. 2019, 21, 3417–3442. [Google Scholar] [CrossRef] [Green Version]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.H.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef] [Green Version]
- De Armas, J.; Keenan, P.; Juan, A.A.; McGarraghy, S. Solving large-scale time capacitated arc routing problems: From real-time heuristics to metaheuristics. Ann. Oper. Res. 2019, 273, 135–162. [Google Scholar] [CrossRef]
- Gonzalez-Martin, S.; Juan, A.A.; Riera, D.; Elizondo, M.G.; Ramos, J.J. A simheuristic algorithm for solving the arc routing problem with stochastic demands. J. Simul. 2018, 12, 53–66. [Google Scholar] [CrossRef]
- Chao, I.M.; Golden, B.L.; Wasil, E.A. The team orienteering problem. Eur. J. Oper. Res. 1996, 88, 464–474. [Google Scholar] [CrossRef]
- Reyes-Rubiano, L.S.; Ospina-Trujillo, C.F.; Faulin, J.; Mozos, J.M.; Panadero, J.; Juan, A.A. The team orienteering problem with stochastic service times and driving-range limitations: A simheuristic approach. In Proceedings of the 2018 Winter Simulation Conference (WSC), Gothenburg, Sweden, 9–12 December 2018; IEEE: New York, NY, USA, 2018; pp. 3025–3035. [Google Scholar]
- Liao, C.S.; Lu, S.H.; Shen, Z.J.M. The electric vehicle touring problem. Transp. Res. Part B Methodol. 2016, 86, 163–180. [Google Scholar] [CrossRef] [Green Version]
- Mufalli, F.; Batta, R.; Nagi, R. Simultaneous sensor selection and routing of unmanned aerial vehicles for complex mission plans. Comput. Oper. Res. 2012, 39, 2787–2799. [Google Scholar] [CrossRef]
- Panadero, J.; Juan, A.A.; Bayliss, C.; Currie, C. Maximising reward from a team of surveillance drones: A simheuristic approach to the stochastic team orienteering problem. Eur. J. Ind. Eng. 2020, 14, 485–516. [Google Scholar] [CrossRef]
- Juan, A.A.; Freixes, A.; Panadero, J.; Serrat, C.; Estrada-Moreno, A. Routing Drones in Smart Cities: A Biased-Randomized Algorithm for Solving the Team Orienteering Problem in Real Time. Transp. Res. Procedia 2020, 47, 243–250. [Google Scholar] [CrossRef]
- Martins, L.d.C.; Hirsch, P.; Juan, A.A. Agile optimization of a two-echelon vehicle routing problem with pickup and delivery. Int. Trans. Oper. Res. 2021, 28, 201–221. [Google Scholar] [CrossRef]
- Martins, L.d.C.; de la Torre, R.; Corlu, C.G.; Juan, A.A.; Masmoudi, M.A. Optimizing ride-sharing operations in smart sustainable cities: Challenges and the need for agile algorithms. Comput. Ind. Eng. 2021, 153, 107080. [Google Scholar] [CrossRef]
- Arnau, Q.; Juan, A.A.; Serra, I. On the use of learnheuristics in vehicle routing optimization problems with dynamic inputs. Algorithms 2018, 11, 208. [Google Scholar] [CrossRef] [Green Version]
- Saeedvand, S.; Aghdasi, H.S.; Baltes, J. Novel hybrid algorithm for Team Orienteering Problem with Time Windows for rescue applications. Appl. Soft Comput. 2020, 96, 106700. [Google Scholar] [CrossRef]
- Xu, W.; Xu, Z.; Peng, J.; Liang, W.; Liu, T.; Jia, X.; Das, S.K. Approximation algorithms for the team orienteering problem. In Proceedings of the IEEE INFOCOM 2020—IEEE Conference on Computer Communications, Toronto, ON, Canada, 6–9 July 2020; IEEE: New York, NY, USA, 2020; pp. 1389–1398. [Google Scholar]
- Sundar, K.; Sanjeevi, S. A Branch-and-Price Algorithm for a Team Orienteering Problem for Fixed-Wing Drones. arXiv 2021, arXiv:1912.04353. [Google Scholar]
- Gavalas, D.; Konstantopoulos, C.; Mastakas, K.; Pantziou, G. A survey on algorithmic approaches for solving tourist trip design problems. J. Heuristics 2014, 20, 291–328. [Google Scholar] [CrossRef]
- Karbowska-Chilinska, J.; Chociej, K. Genetic Algorithm for Generation Multistage Tourist Route of Electrical Vehicle. In Proceedings of the International Conference on Computer Information Systems and Industrial Management, Bialystok, Poland, 16–18 October 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 366–376. [Google Scholar]
- Lee, J.; Park, G.L. Orienteering problem modeling for electric vehicle-based tour. In Proceedings of the Asian Conference on Intelligent Information and Database Systems, Kuala Lumpur, Malaysia, 18–20 March 2013; Springer: Berlin/Heidelberg, Germany, 2013; pp. 100–108. [Google Scholar]
- Lee, J.; Kim, S.W.; Park, G.L. A tour recommendation service for electric vehicles based on a hybrid orienteering model. In Proceedings of the 28th Annual ACM Symposium on Applied Computing, Coimbra, Portugal, 18–22 March 2013; pp. 1652–1654. [Google Scholar]
- Wang, Y.W.; Lin, C.C.; Lee, T.J. Electric vehicle tour planning. Transp. Res. Part D Transp. Environ. 2018, 63, 121–136. [Google Scholar] [CrossRef]
- Chen, R.; Liu, X.; Miao, L.; Yang, P. Electric Vehicle Tour Planning Considering Range Anxiety. Sustainability 2020, 12, 3685. [Google Scholar] [CrossRef]
- Pěnička, R.; Faigl, J.; Saska, M.; Váňa, P. Data collection planning with non-zero sensing distance for a budget and curvature constrained unmanned aerial vehicle. Auton. Robot. 2019, 43, 1937–1956. [Google Scholar] [CrossRef]
- Tordecilla, R.D.; Martins, L.d.C.; Saiz, M.; Copado-Mendez, P.J.; Panadero, J.; Juan, A.A. Agile Computational Intelligence for Supporting Hospital Logistics During the COVID-19 Crisis. In Computational Management; Springer: Berlin/Heidelberg, Germany, 2021; pp. 383–407. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Problem Characteristics | Solution Approach | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Single Vehicle | Multiple Vehicles | Time Windows | Homog. Fleet | Heterog. Fleet | Det. | Stoch. | Exact | Heuristic | Metaheuristic | Approximation | Machine Learning | Simulation | Hybrid | |
| Li et al. [103] | • | • | • | ACO | • | |||||||||
| Zhang et al. [104] | • | • | • | • | ALNS, VND | • | ||||||||
| Zhen et al. [105] | • | • | • | • | • | PSO | ||||||||
| Keskin et al. [106] | • | • | • | • | ALNS | • | • | |||||||
| Bahrami et al. [107] | • | • | • | • | • | • | ||||||||
| Zhu et al. [108] | • | • | • | SSH-VNS | ||||||||||
| Kancharla and Ramadurai [109] | • | • | • | ALNS | ||||||||||
| Mao et al. [110] | • | • | • | • | ACO | • | ||||||||
| Lu et al. [111] | • | • | • | IVNS | ||||||||||
| Raeesi and Zografos [112] | • | • | • | • | LNS | |||||||||
| Li et al. [113] | • | • | • | MA, SVND | • | |||||||||
| Karakatič [114] | • | • | • | GA | ||||||||||
| Li et al. [115] | • | • | • | • | GA | |||||||||
| Granada-Echeverri et al. [116] | • | • | • | ILS | ||||||||||
| Löffler et al. [117] | • | • | • | • | LNS, GTS | • | ||||||||
| Lee [118] | • | • | • | |||||||||||
| Al Theeb et al. [119] | • | • | • | • | ||||||||||
| Zhu et al. [101] | • | • | • | • | GA | |||||||||
| Lin and Zhou [120] | • | • | • | • | ||||||||||
| Taş [121] | • | • | • | • | ||||||||||
| Zhao and Li [122] | • | • | • | ACO | • | |||||||||
| Hulagu and Celikoglu [123] | • | • | • | • | ||||||||||
| Zhao et al. [124] | • | • | • | • | ACO | • | ||||||||
| Outalha et al. [102] | • | • | • | |||||||||||
| Yang et al. [125] | • | • | • | • | • | |||||||||
| Bac and Erdem [126] | • | • | • | • | VNS, VND | |||||||||
| Yu et al. [127] | • | • | • | ALNS | ||||||||||
| Li et al. [128] | • | • | • | • | • | • | ||||||||
| Yindong et al. [129] | • | • | • | • | EDA-LF | |||||||||
| Basso et al. [130] | • | • | • | • | • | |||||||||
| Jia et al. [131] | • | • | • | BACO | ||||||||||
| Wang et al. [132] | • | • | • | MA | ||||||||||
| Deng et al. [133] | • | • | • | • | • | IDE | • | |||||||
| Ham and Park [134] | • | • | • | • | • | • | ||||||||
| Florio et al. [135] | • | • | • | • | • | |||||||||
| Park and Jin [136] | • | • | • | • | ||||||||||
| Ferro et al. [137] | • | • | • | • | • | • | ||||||||
| Zhao and Shi [100] | • | • | • | • | ALNS | • | ||||||||
| Ge et al. [138] | • | • | • | • | TS | • | ||||||||
| Wang et al. [139] | • | • | • | • | VNS | |||||||||
| Li et al. [99] | • | • | • | ACO, GA | • | |||||||||
| Keskin and Çatay [140] | • | • | • | • | • | ALNS | ||||||||
| Verma [141] | • | • | • | • | • | • | GA | |||||||
| Authors | Problem Characteristics | Solution Approach | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Single Period | Multiple Periods | Time Windows | Homog. Fleet | Heterog. Fleet | Det. | Stoch. | Exact Method | Heuristic | Matheuristic | |
| Yurtseven and Gökçe [152] | • | • | • | • | • | |||||
| Campbell et al. [153] | • | • | • | • | • | |||||
| Campbell et al. [154] | • | • | • | • | ||||||
| Chow [155] | • | • | • | • | ||||||
| Li et al. [156] | • | • | • | • | • | |||||
| Liu et al. [157] | • | • | • | • | ||||||
| Luo et al. [158] | • | • | • | • | ||||||
| Authors | Problem Characteristics | Solution Approach | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Single Vehicle | Multiple Vehicles | Time Windows | Homog. Fleet | Heterog. Fleet | Det. | Stoch. | Exact | Heuristic | Metaheuristic | Approximation | Machine Learning | Simulation | Hybrid | |
| Mufalli et al. [168] | • | • | • | • | • | • | ||||||||
| Reyes-Rubiano et al. [166] | • | • | • | BRMS | • | • | ||||||||
| Panadero et al. [169] | • | • | • | VNS | • | • | ||||||||
| Xu et al. [175] | • | • | • | • | ||||||||||
| Juan et al. [170] | • | • | • | • | ||||||||||
| Bayliss et al. [16] | • | • | • | BRMS | • | • | ||||||||
| Saeedvand et al. [174] | • | • | • | • | NSGA | • | • | |||||||
| Sundar and Sanjeevi [176] | • | • | • | • | ||||||||||
| Lee and Park [179] | • | • | • | GA | ||||||||||
| Lee et al. [180] | • | • | • | GA | ||||||||||
| Wang et al. [181] | • | • | • | • | • | • | • | |||||||
| Pěnička et al. [183] | • | • | • | VNS | ||||||||||
| Chen et al. [182] | • | • | • | • | • | |||||||||
| Karbowska-Chilinska and Chociej [178] | • | • | • | GA | ||||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martins, L.d.C.; Tordecilla, R.D.; Castaneda, J.; Juan, A.A.; Faulin, J. Electric Vehicle Routing, Arc Routing, and Team Orienteering Problems in Sustainable Transportation. Energies 2021, 14, 5131. https://doi.org/10.3390/en14165131
Martins LdC, Tordecilla RD, Castaneda J, Juan AA, Faulin J. Electric Vehicle Routing, Arc Routing, and Team Orienteering Problems in Sustainable Transportation. Energies. 2021; 14(16):5131. https://doi.org/10.3390/en14165131
Chicago/Turabian StyleMartins, Leandro do C., Rafael D. Tordecilla, Juliana Castaneda, Angel A. Juan, and Javier Faulin. 2021. "Electric Vehicle Routing, Arc Routing, and Team Orienteering Problems in Sustainable Transportation" Energies 14, no. 16: 5131. https://doi.org/10.3390/en14165131