PLC Automation and Control Strategy in a Stirling Solar Power System


 , , and
, , and
Abstract
:1. Introduction
- -
- real-time monitoring of the parameters given by temperature, pressure, and rotation sensors;
- -
- recording of the operation results—electrical and thermal energy produced by the Stirling engine with solar concentrator, operating times, and various reports;
- -
- automation of start and stop sequences of the Stirling engine with an integrated protection system;
- -
- optimization of energy production according to the solar irradiation;
- -
- alarm management and security procedures (depending on various weather factors, on a working gas pressure drop, or on a rise in temperature outside the working domain);
- -
- remote transmission of the generated and acquired signals;
- -
- integration of the installation in complex cogeneration systems, as well as in energy optimization systems.
- implementation of the start and stop sequences of the test stand in safe conditions;
- development of a human–machine interface (HMI) and an application for monitoring and data acquisition for the purpose of reporting safe operation;
- automatization of the maximum solar radiation tracking system.
- ➢
- photovoltaic panels;
- ➢
- tower solar concentrators;
- ➢
- thermal power stations, having solar collectors with parabolic trough or Fresnel systems (parabolic trough collectors (PTC) or linear Fresnel reflectors (LFR));
- ➢
- solar concentrators with a Stirling engine.
2. Structure of the Automation and Control System
2.1. Proposed Automation Systems: National Instruments and Schneider Electric
2.2. Equipment Monitored/Controlled by the Automation System
3. Operating Principle
- -
- main circuit of the Stirling engine (working fluid—Helium);
- -
- secondary circuit of the Stirling engine—cooling circuit (working fluid—water).
- ➢
- burner Gulliver BS2D, made by Riello, Italy, having the following characteristics: thermal power, 35/40 ÷ 91 kW; propane tank, 1.3/1.6 ÷ 3.5 Nm3/h; volume 26 L; burner control MG569; electrical power: 0.180 kW;
- ➢
- fan CA/line—10, made by SODECA, Spain, having the following characteristics: power 0.095 kW; speed 2460 ÷ 2720 s−1;
- ➢
- thermocouple type K, made by CAOM, Pascani, Romania;
- ➢
- mixing tube, Ø300 mm, length 800 mm, material 304 L;
- ➢
- gas exhaust pipe.
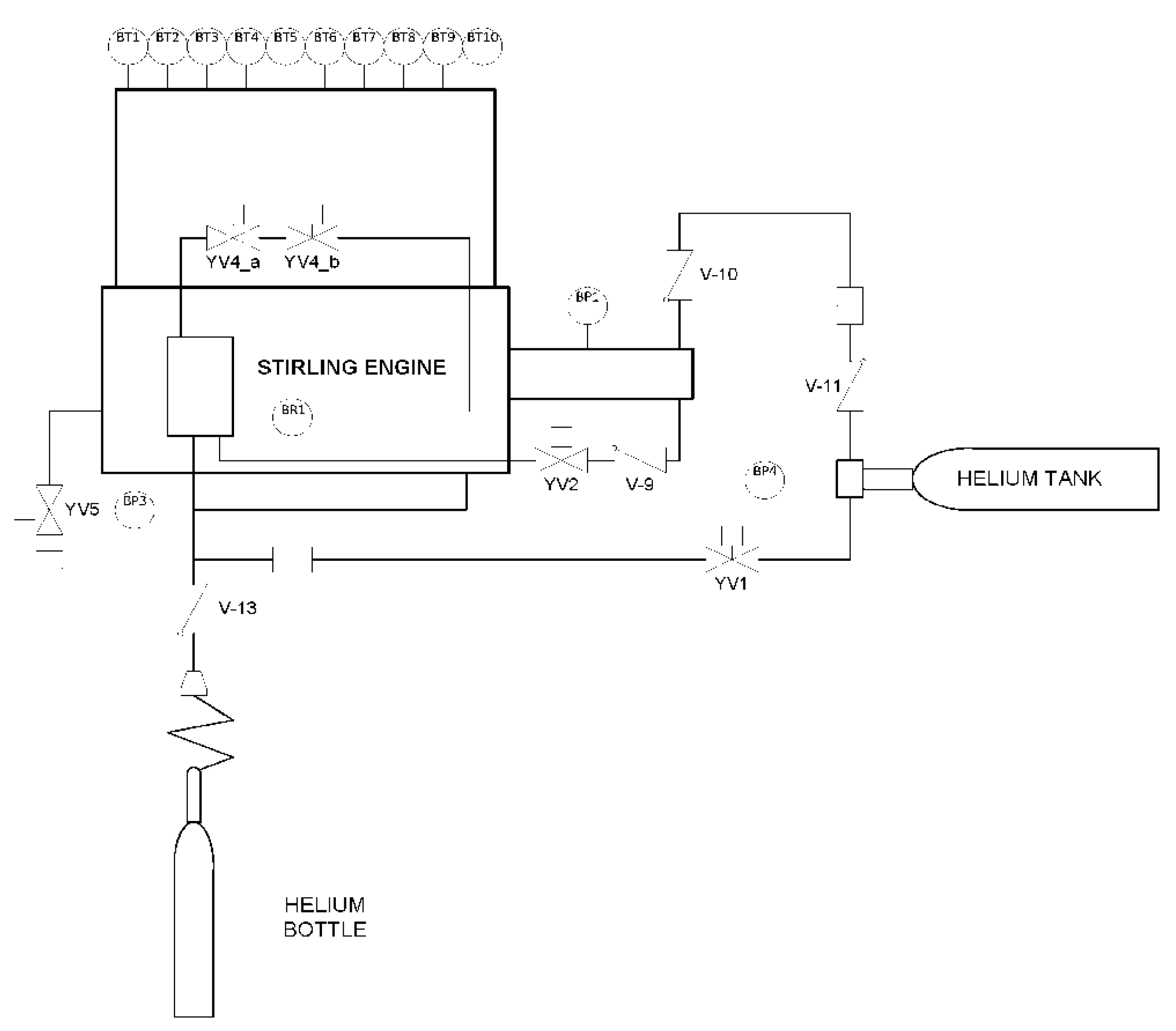
3.1. Main Circuit of the Stirling Engine (Working Fluid—Helium)
- temperature sensors positioned on the main exchanger (hot bulb). Physically, there are 20 sensors, of which only 10, BT1–BT10, are used for temperature monitoring on the main exchanger and are placed in the connector in the local connection box, from where they are interconnected in the input/output connectors from the automation cabinet. The other 10 sensors are kept as back-up in case the used ones fail;
- two pressure switches, one on the oil circuit, BP1, and the other on the water circuit, BP2;
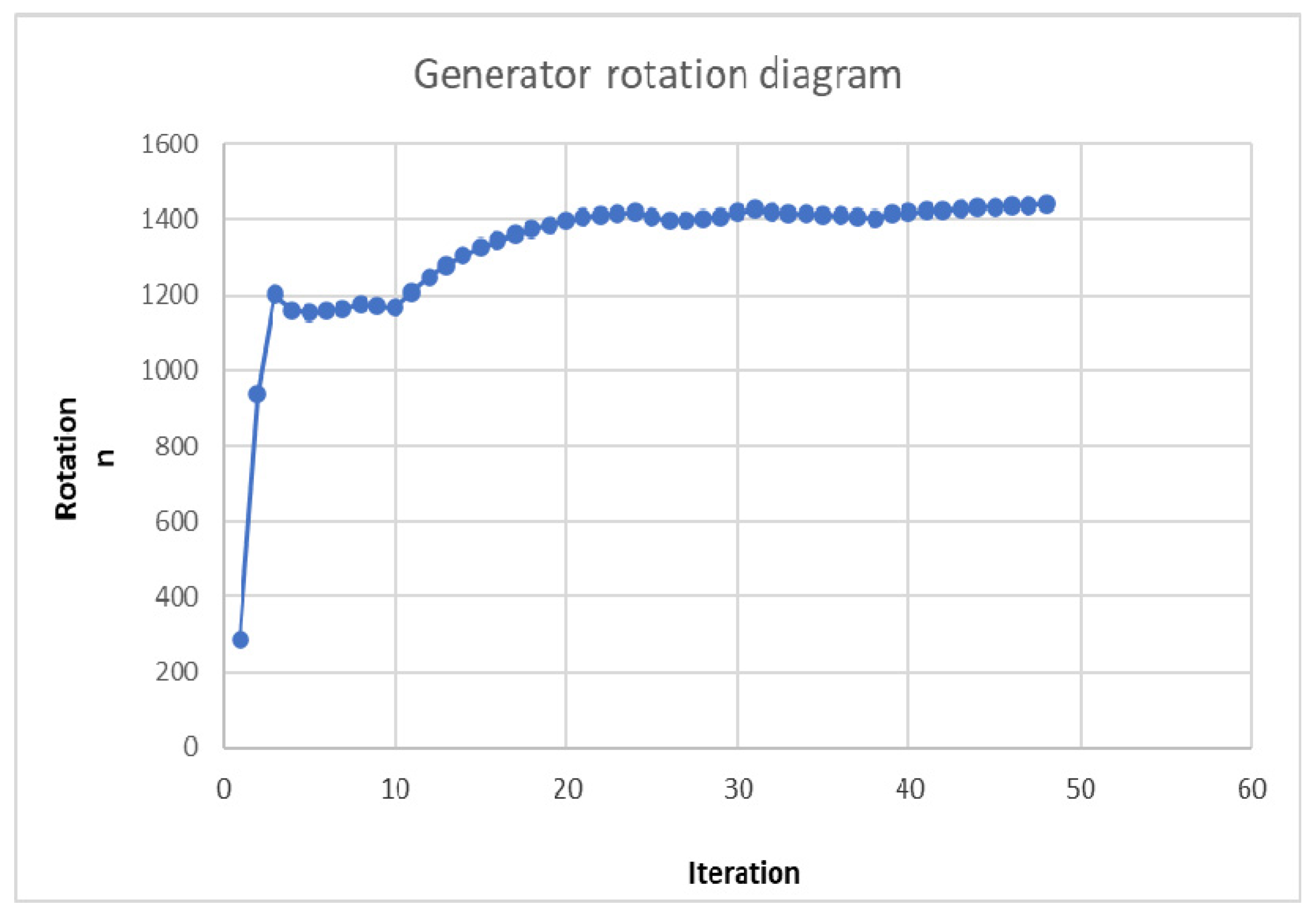
- generator speed sensor BR1;
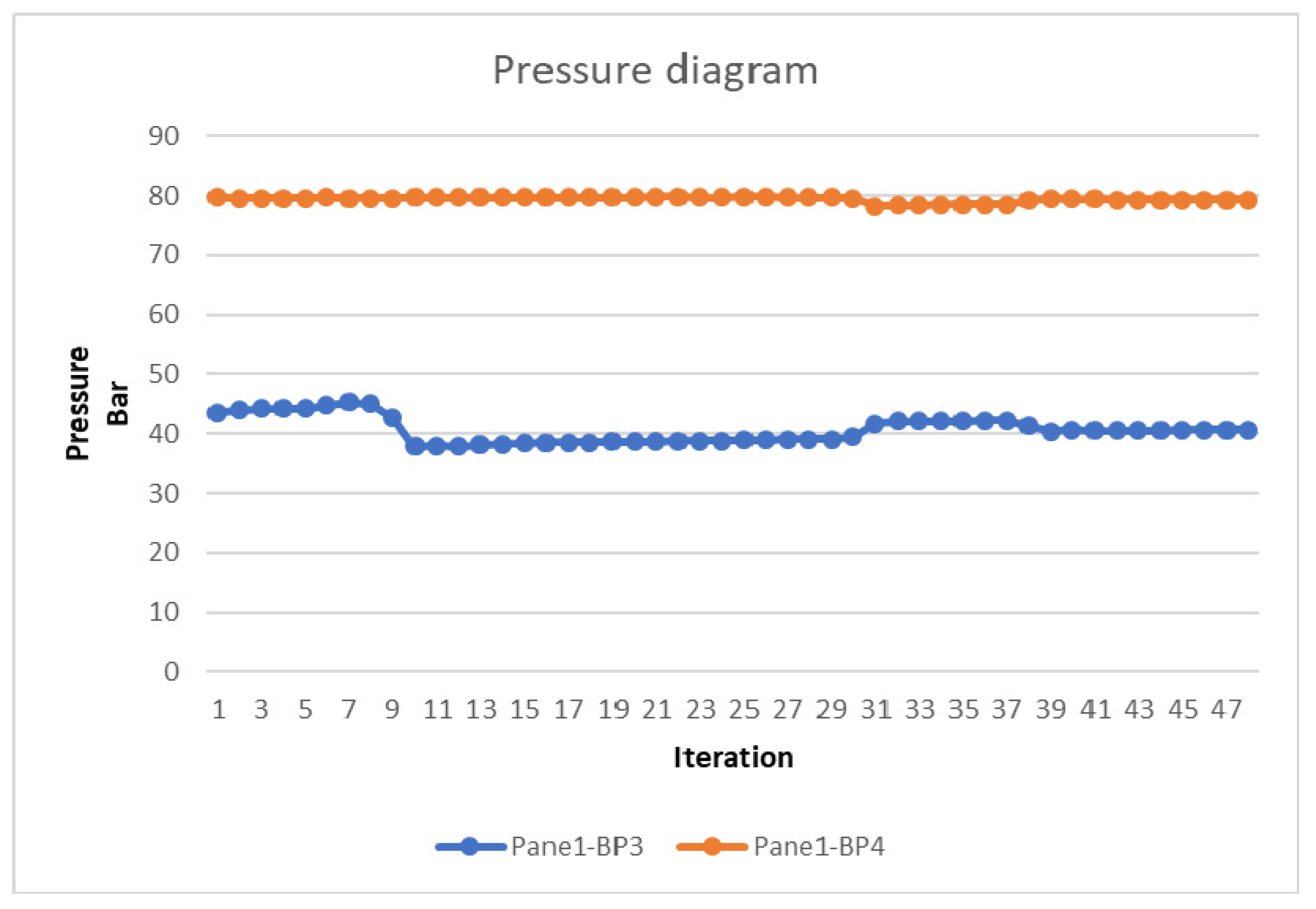
- two pressure transmitters, one on the water heat-exchanger and the other on the oil circuit BP3, BP4;
- the rotation sensor, BR1, which reads the rotations on the Stirling engine flywheel;
- solenoid actuators, motors, etc.
3.2. Secondary Circuit of the Stirling Engine: Cooling Circuit (Working Fluid—Water)
- -
- temperature sensors mounted on the cooling water circuit, BT11 and BT12;
- -
- pressure switch BP2 on the water circuit;
- -
- actuators, valves, motors, pulse compensator, etc.
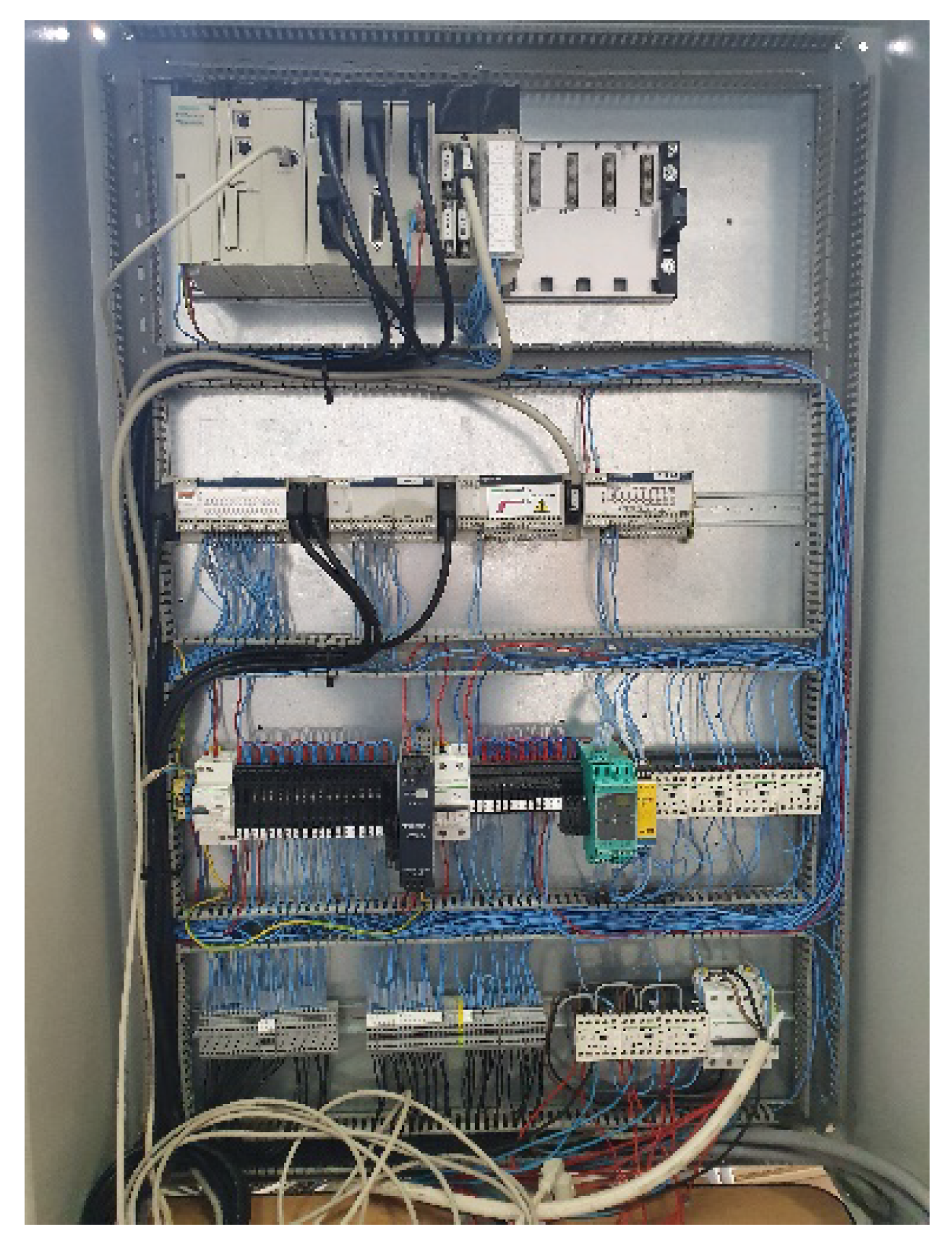
3.3. Electrical Automation Schemes
- connection diagrams of the temperature sensors from the primary exchanger BT1–BT10, from the cooling circuit BT12, rotation sensors BR1, pressure sensors BP3 and BP4, and the temperature sensor BT11, made in the rack modules two and three;
- connection diagram of the actuation of the motors M1 – M4, realized in rack modules 4, 5, and 6;
- power supply diagram for 24 VDC and 230 VAC;
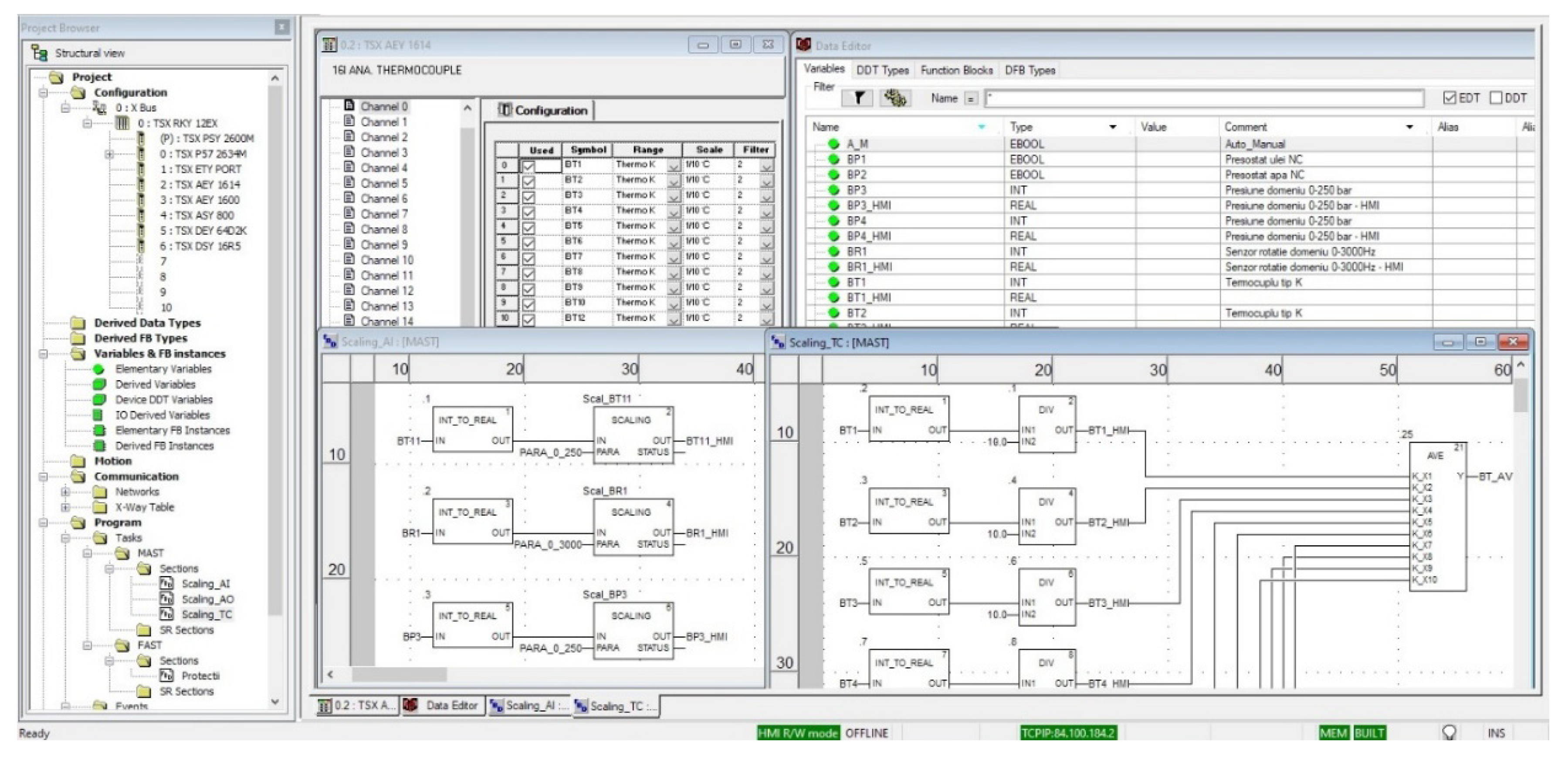
- automation loops of temperature sensors BT1–BT10, and BT12, rack module two (Figure 9);
- automation loops of the pressure sensors BP3, BP4, the rotation sensor BR1, and the temperature sensor on the housing of the motor crankcase BT11, rack module three (Figure 10);
- automation loops of pressure sensors BP1, BP2, and actuator M2, rack modules four and five;
- automation loops for actuating the solenoid valves YV1, YV2, YV4_a, YV4_b, YV5, and YV6, rack module six;
- automation loops for actuating the motors M1, M2, M3, and M4, rack module six.
4. Case Study
- for continuous measurements—analogic signal 4–20 mA;
- for discrete signals—zero potential contact.
- for continuous signal—analogic signal 0–10 V;
- for discrete signal—digital signal 24 VDC.
- temperature measurement.
- Pressure measurement.
- Engine rotation measurement.
- Pump/fan control.
- Control of automatic valves.
4.1. Acquisition, Control, and Monitoring of the Process Parameters
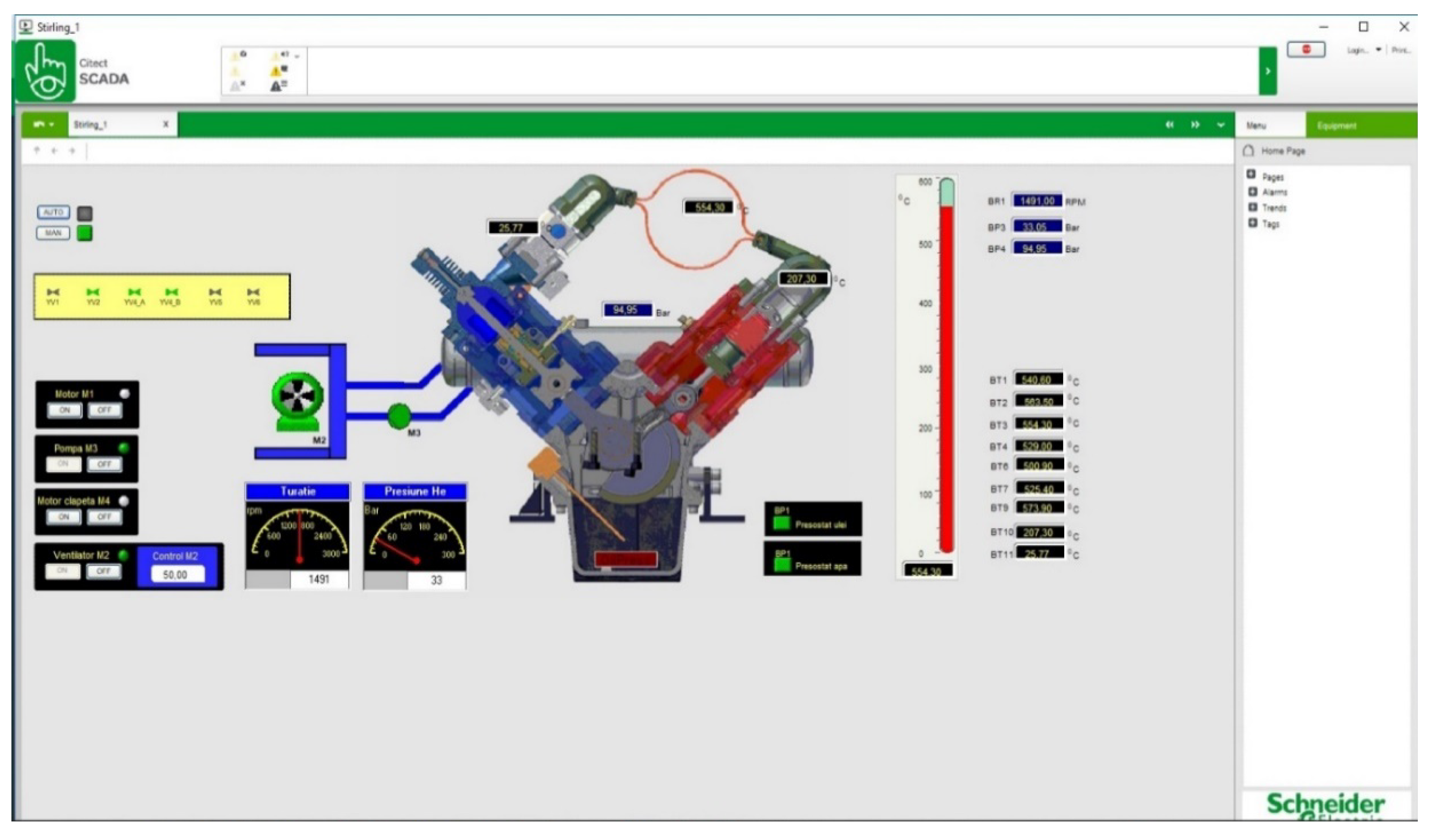
4.2. Human-Machine Interface HMI
5. Results and Discussions
- ➢
- powering the automation installation;
- ➢
- operation of the YV1 valve for charging the He circuit of the Stirling engine at 80 bar;
- ➢
- starting the supply of thermal energy with a propane thermal burner, with the following steps:
- ○
- setting the temperature to 450–500 °C;
- ○
- positioning of the type-K thermocouple for the primary exchanger of the Stirling engine;
- ○
- propane supply by opening the 26 L cylinder tap;
- ○
- ignition of the burner;
- ○
- adjustment of air flow through the mixing chamber;
- ○
- reading of the temperature transmitted by the type-K thermocouple.
- ➢
- When the minimum operating temperature exceeds 450 °C, start the Stirling engine using the Siemens electric generator connected to the engine, in order to start the rotation.
- ➢
- At this moment, the Stirling engine quickly enters the operating mode. The data monitored by the automation which are presented in this section confirm the stability of its operation. The small variations are due to the variation of the heat source over time—repeated tests were performed, the values collected were maintained in the same ranges.
- ➢
- For the shut-down sequence, the Riello burner heat source is reduced and, when the temperature drops to 350 °C, the engine diminishes its speed and stops.
- ➢
- the previously presented test which used a thermal energy source represented by a Riello gas burner;
- ➢
- another test which used a battery of electrical resistors with a nominal power of 12 kW, which ensured the operation at a lower, but stable level.
6. Conclusions
- -
- creation of start and stop sequences of the test stand in safe conditions;
- -
- improved security protocols;
- -
- development of a monitoring application and data acquisition for reporting purposes;
- -
- positioning of the solar concentrator in the direction of the sun in order to obtain the maximum radiation.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kuban, L.; Stempka, J.; Tyliszczak, A. A 3D-CFD study of a g-type Stirling engine. Energy 2019, 169, 142–159. [Google Scholar] [CrossRef]
- Burke, M.J.; Stephens, J.C. Political power and renewable energy futures: A critical review. Energy Res. Soc. Sci. 2018, 35, 78–93. [Google Scholar] [CrossRef]
- Mancini, T.; Heller, P.; Butler, B.; Osborn, B.; Schiel, W.; Goldberg, V.; Buck, R.; Diver, R.; Andraka, C.; Moreno, J. Dish-Stirling systems: An overview of development and status. J. Sol. Energy Eng. 2003, 125, 135–151. [Google Scholar] [CrossRef]
- Stirling engine. Available online: https://en.wikipedia.org/wiki/Stirling_engine (accessed on 17 January 2020).
- Kongtragool, B.; Wongwises, S. A review of solar-powered stirling engines and low temperature differential stirling engine. Renew. Sustain. Energy Rev. 2003, 7, 131–154. [Google Scholar] [CrossRef]
- CSP World Website. Available online: http://www.cspworld.org/cspworldmap (accessed on 17 January 2020).
- Zabalaga, P.J.; Cardozo, E.; Campero, L.C.; Ramos, J.A. Performance Analysis of a Stirling Engine Hybrid Power System. Energies 2020, 13, 980. [Google Scholar] [CrossRef] [Green Version]
- Toro, C.; Rocco, M.V.; Colombo, E. Exergy and Thermoeconomic Analyses of Central Receiver Concentrated Solar Plants Using Air as Heat Transfer Fluid. Energies 2016, 9, 885. [Google Scholar] [CrossRef] [Green Version]
- Badea, G.; Felseghi, R.-A.; Varlam, M.; Filote, C.; Culcer, M.; Iliescu, M.; Răboacă, M.S. Design and Simulation of Romanian Solar Energy Charging Station for Electric Vehicles. Energies 2019, 12, 74. [Google Scholar] [CrossRef] [Green Version]
- Raboaca, M.S. Sustaining the passive house with hybrid energy photovoltaic panels—Fuel cell. Prog. Cryog. Isot. Sep. 2015, 18, 65–72. [Google Scholar]
- Cannistraro, M.; Mainardi, E.; Bottarelli, M. Testing a Dual-Source Heat Pump. Math. Modeling Eng. Probl. 2018, 5, 205–221. [Google Scholar] [CrossRef] [Green Version]
- González-Roubaud, E.; Pérez-Osorio, D.; Prieto, C. Review of commercial thermal energy storage in concentrated solar power plants: Steam vs. molten salts. Renew. Sustain. Energy Rev. 2017, 80, 133–148. [Google Scholar] [CrossRef]
- Dowling, A.W.; Zheng, T.; Zavala, V.M. Economic assessment of concentrated solar power technologies: A review. Renew. Sustain. Energy Rev. 2017, 72, 1019–1032. [Google Scholar] [CrossRef]
- Felseghi, R.A.; Carcadea, E.; Raboaca, M.S.; Trufin, C.N.; Filote, C. Hydrogen Fuel Cell Technology for the Sustainable Future of Stationary Applications. Energies 2019, 12, 4593. [Google Scholar] [CrossRef] [Green Version]
- Islas, S.; Beltran-Chacon, R.; Velazquez, N.; Leal-Chavez, D.; Lopez-Zavala, R.; Aguilar-Jimenez, J.A. A numerical study of the influence of design variable interactions on the performance of a Stirling engine System. Appl. Therm. Eng. 2020, 170, 115039. [Google Scholar] [CrossRef]
- Malali, P.; Chaturvedi, S.; Agarwala, R. Effects of circumsolar radiation on the optimal performance of a Stirling heat engine coupled with a parabolic dish solar collector. Appl. Therm. Eng. 2019, 159, 113961. [Google Scholar] [CrossRef]
- Zare, S.; Tavakolpur-Saleh, A.R. Predicting onset conditions of a free piston Stirling engine. Appl. Energy 2020, 262, 114488. [Google Scholar] [CrossRef]
- Vieira de Souza, L.E.; Gilmanova Cavalcante, A.M. Concentrated Solar Power deployment in emerging economies: The cases of China and Brazil. Renew. Sustain. Energy Rev. 2017, 72, 1094–1103. [Google Scholar] [CrossRef]
- Mohammadnia, A.; Ziapour, B.; Sedaghati, F.; Rosendhal, L.; Rezania, A. Utilizing thermoelectric generator as cavity temperature controller for temperature management in dish-Stirling engine. Applied Thermal Engineering 2020, 165, 114568. [Google Scholar] [CrossRef]
- Buscemi, A.; Lo Brano, V.; Chiaruzzi, C.; Ciulla, G.; Kalogeri, C. A validated energy model of a solar dish-Stirling system considering the cleanliness of mirrors. Appl. Energy 2020, 260, 114378. [Google Scholar] [CrossRef] [Green Version]
- Pelay, U.; Luo, L.; Fan, Y.; Stitou, D.; Rood, M. Thermal energy storage systems for concentrated solar power plants. Renew. Sustain. Energy Rev. 2017, 79, 82–100. [Google Scholar] [CrossRef]
- Liu, M.; Tay, N.H.S.; Bell, S.; Belusko, M.; Jacob, R.; Will, G.; Saman, W.; Bruno, F. Review on concentrating solar power plants and new developments in high temperature thermal energy storage technologies. Renew. Sustain. Energy Rev. 2016, 53, 1411–1432. [Google Scholar] [CrossRef]
- Arora, R.; Kaushik, S.C.; Kumar, R.; Arora, R. Multi-objective thermo-economic optimization of solar parabolic dish Stirling heat engine with regenerative losses using NSGA-II and decision making. Electr. Power Energy Syst. 2016, 74, 25–35. [Google Scholar] [CrossRef]
- Kannan, N.; Vakeesan, D. Solar energy for future world: A review. Renew. Sustain. Energy Rev. 2016, 62, 1092–1105. [Google Scholar] [CrossRef]
- Lovegrove, K.; Wyder, J.; Agrawal, A.; Borhuah, D.; McDonald, J.; Urkalan, K. Concentrating Solar Power in India; Report Commissioned by the Australian Government and Prepared by ITP Power; ITP Power: Bangkok, Thailand, 2011; ISBN 978-1-921299-52-0. [Google Scholar]
- Răboacă, M.S.; Badea, G.; Enache, A.; Filote, C.; Răsoi, G.; Rata, M.; Lavric, A.; Felseghi, R.A. Concentrating Solar Power Technologies. Energies 2019, 12, 1048. [Google Scholar] [CrossRef] [Green Version]
- Manual Instruction—V1.0—Sunflower 35 CONCENTRATION SOLAR PLANT—STROJÍRNY BOHDALICE. Available online: http://www.concentrating.eu/index.php/power-conversion-unit (accessed on 30 November 2014).
- Raboaca, M.S.; Dumitrescu, C.; Manta, I. Aircraft Trajectory Tracking Using Radar Equipment with Fuzzy Logic Algorithm. Mathematics 2020, 8, 207. [Google Scholar] [CrossRef] [Green Version]
- Aschilean, I.; Rasoi, G.; Raboaca, M.S.; Filote, C.; Culcer, M. Design and Concept of an Energy System Based on Renewable Sources for Greenhouse Sustainable Agriculture. Energies 2018, 11, 1201. [Google Scholar] [CrossRef] [Green Version]
- Alphonsus, E.R.; Abdullah, M.O. Mohammad Omar Abdullah. A review on the applications of programmable logic controllers (PLCs). Renew. Sustain. Energy Rev. 2016, 60, 1185–1205. [Google Scholar] [CrossRef]
- Punnathanam, V.; Koetcha, P. Effective multi-objective optimization of Stirling engine systems. Appl. Therm. Eng. 2016, 108, 261–276. [Google Scholar] [CrossRef]
- Pitz-Paal, P. Parabolic Trough—Linear Fresnel—Power Tower: A Technology Comparison. Available online: http://www.iass-potsdam.de/sites/default/files/files/12.5-iass_pitz-paal.pdf (accessed on 6 April 2020).
- Zayeda, M.; Zhaoa, J.; Lia, W.; Elsheik, A.; Zhaoa, Z.; Lia, K. Performance prediction and techno-economic analysis of solar dish/stirling system for electricity generation. Appl. Therm. Eng. 2020, 164, 114427. [Google Scholar] [CrossRef]
- Awana, A.; Zubaira, M.; Praveena, R.P.; Bhattib, A. Design and comparative analysis of photovoltaic and parabolic trough based CSP plants. Sol. Energy 2019, 183, 551–565. [Google Scholar] [CrossRef]
- CompactRIO. Available online: http://www.ni.com/ro-ro/shop/compactrio.html (accessed on 17 January 2020).
- Where is an Example MODICON RTU Unity Pro Project using DNP3 Protocol. Available online: https://www.schneider-electric.com/en/faqs/FA339010/ (accessed on 17 January 2020).
- Kabir, E.; Kumar, P.; Kumar, S.; Adelodun, A.A.; Kim, K.H. Solar energy: Potential and future prospects. Renew. Sustain. Energy Rev. 2018, 82, 894–900. [Google Scholar] [CrossRef]
- Law, E.W.; Kay, M.; Taylor, R.A. Calculating the financial value of a concentrated solar thermal plant operated using direct normal irradiance forecasts. Sol. Energy 2016, 125, 267–281. [Google Scholar] [CrossRef] [Green Version]
- Ehtiwesh, I.A.S.; Coelho, M.C.; Sousa, A.C.M. Exergetic and environmental life cycle assessment analysis of concentrated solar power plants. Renew. Sustain. Energy Rev. 2016, 56, 145–155. [Google Scholar] [CrossRef]
- Mocanu, D.A.; Badescu, V.; Carcadea, E.; Armeanu, A. Computational analysis of the tubular heat exchanger of an integrated energy generation system using a solar Stirling engine. U.P.B. Sci. Bull. 2020, 82, 139–150. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equipment | Model |
|---|---|
| Pressure sensors | Drucksensor BA 520, Huba Control AG I = 4....20 mA; U1 ≤ 30 V; I1 ≤ 100 mA; P1 ≤ 750 mW T = −30 ÷ 120 °C |
| Fan | Ebm-papst Mulfingen GmbH&Co, W3G630GQ;3721-BA-ENU Single phase; 230V; Speed: 1000 rot/min; P = 720 W; 140 Pa; T = −250 ÷ 60 °C |
| Rotation sensor | BESM08EH-PSC15B-S04G, BALLUF Ue = 24 Vcc; Ie = 200 mA; H = 15%; Ir = 20 µA; f = 3000 Hz; IP68; T = −25 ÷ 70 °C |
| Frequency signal adapter | ZKFD2-UFC-11.D produced by PEPPER+FUCHS which converts the frequency into proportional current 4 ÷ 20 mA 24 V DC supply (Power Rail); 1 mHz … 10 kHz; Ie 0/4 mA … 20 mA |
| Slot extension rack | Modicon Premium TSXRKY12EX |
| Communication module processor | TSXP573634M |
| Power supply module | TSXPSY2600M |
| ETHERNET | TSX ETY 110 module |
| One analog input module | TSX AEY 1600—16 voltage/current inputs |
| One analog input module | TSX AEY 1614–16 thermocouple inputs |
| One analog output module | TSX ASY 800—8 voltage/current outputs |
| One discrete output module | TSX DSY 16R5—16 discrete relay outputs |
| One discrete input module | TSX DEY 64D2K—64 discrete inputs |
| No. | TAG | Type | Domain | Measured Parameter |
|---|---|---|---|---|
| 1 | BT1 | Type K temperature sensor | 0–1000 °C | Helium |
| 2 | BT2 | Type K temperature sensor | 0–1000 °C | Helium |
| 3 | BT3 | Type K temperature sensor | 0–1000 °C | Helium |
| 4 | BT4 | Type K temperature sensor | 0–1000 °C | Helium |
| 5 | BT5 | Type K temperature sensor | 0–1000 °C | Helium |
| 6 | BT6 | Type K temperature sensor | 0–1000 °C | Helium |
| 7 | BT7 | Type K temperature sensor | 0–1000 °C | Helium |
| 8 | BT8 | Type K temperature sensor | 0–1000 °C | Helium |
| 9 | BT9 | Type K temperature sensor | 0–1000 °C | Helium |
| 10 | BT10 | Type K temperature sensor | 0–1000 °C | Helium |
| 11 | BT11 | Type PT100 temperature sensor | 0–250 °C | Cooling water |
| 12 | BT12 | Type K temperature sensor | 0–1000 °C | Helium |
| 13 | BP3 | Pressure transmitter | 0–250 bar (g) | Helium |
| 14 | BP4 | Pressure transmitter | 0–250 bar (g) | Helium |
| 15 | BR1 | Rotation sensor | 0–3000 Hz | Rotation |
| Valves | Dynamic Equipment (Pumps, Compressors) | Electric Heaters | |||
|---|---|---|---|---|---|
| Color | State | Color | State | Color | State |
| Gray | Closed | Gray | On | Gray | Unpowered |
| Green | Open | Green | Off | Green | Powered |
| Red | Discrepancy/missing | Red | No voltage | ||
| Orange | In motion/partially open | ||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mocanu, D.-A.; Bădescu, V.; Bucur, C.; Ștefan, I.; Carcadea, E.; Răboacă, M.S.; Manta, I. PLC Automation and Control Strategy in a Stirling Solar Power System. Energies 2020, 13, 1917. https://doi.org/10.3390/en13081917
Mocanu D-A, Bădescu V, Bucur C, Ștefan I, Carcadea E, Răboacă MS, Manta I. PLC Automation and Control Strategy in a Stirling Solar Power System. Energies. 2020; 13(8):1917. https://doi.org/10.3390/en13081917
Chicago/Turabian StyleMocanu, Dan-Adrian, Viorel Bădescu, Ciprian Bucur, Iuliana Ștefan, Elena Carcadea, Maria Simona Răboacă, and Ioana Manta. 2020. "PLC Automation and Control Strategy in a Stirling Solar Power System" Energies 13, no. 8: 1917. https://doi.org/10.3390/en13081917