A Coupling Diagnosis Method for Sensor Faults Detection, Isolation and Estimation of Gas Turbine Engines


Abstract
:1. Introduction
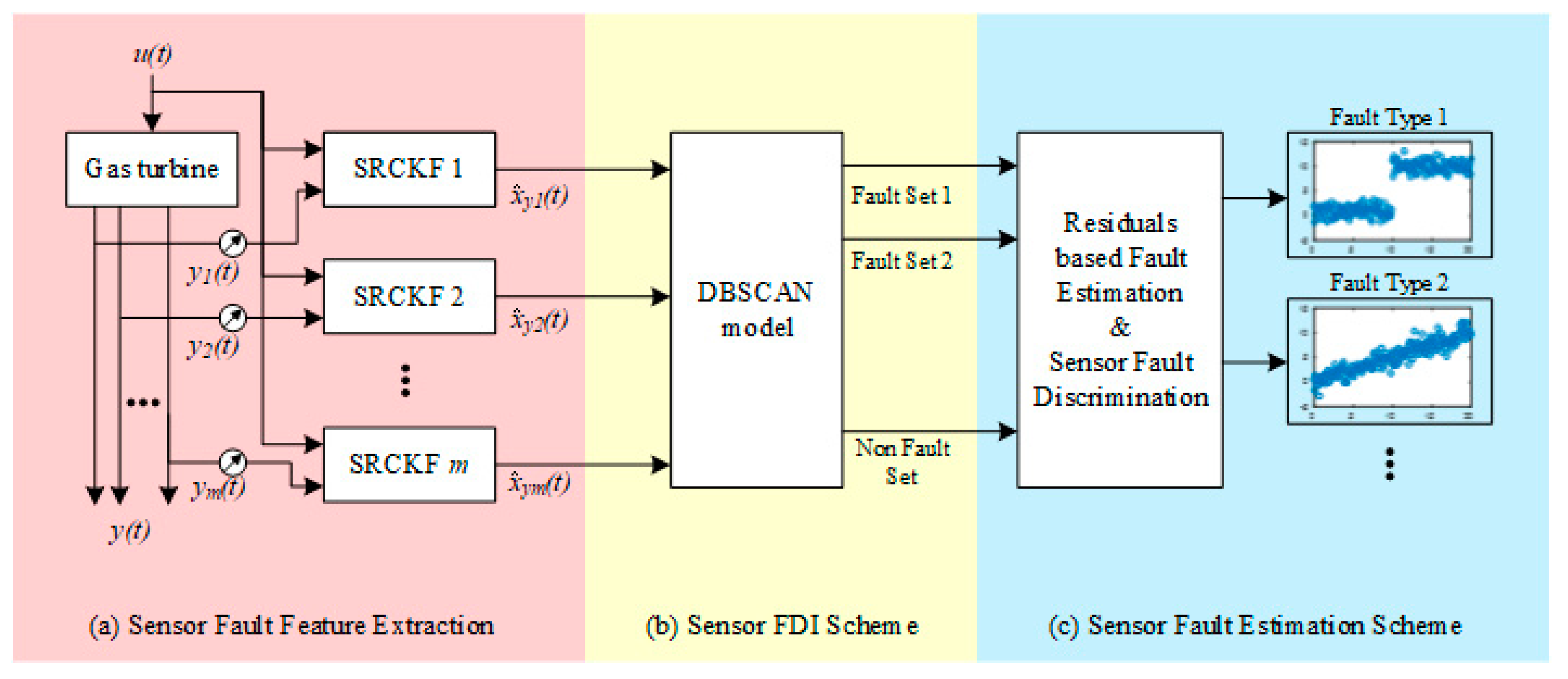
2. Sensor Fault Detection, Isolation and Estimation (FDI&E) Methodology
2.1. Square Root Cubature Kalman Filter Based Sensor Fault Feature Extraction
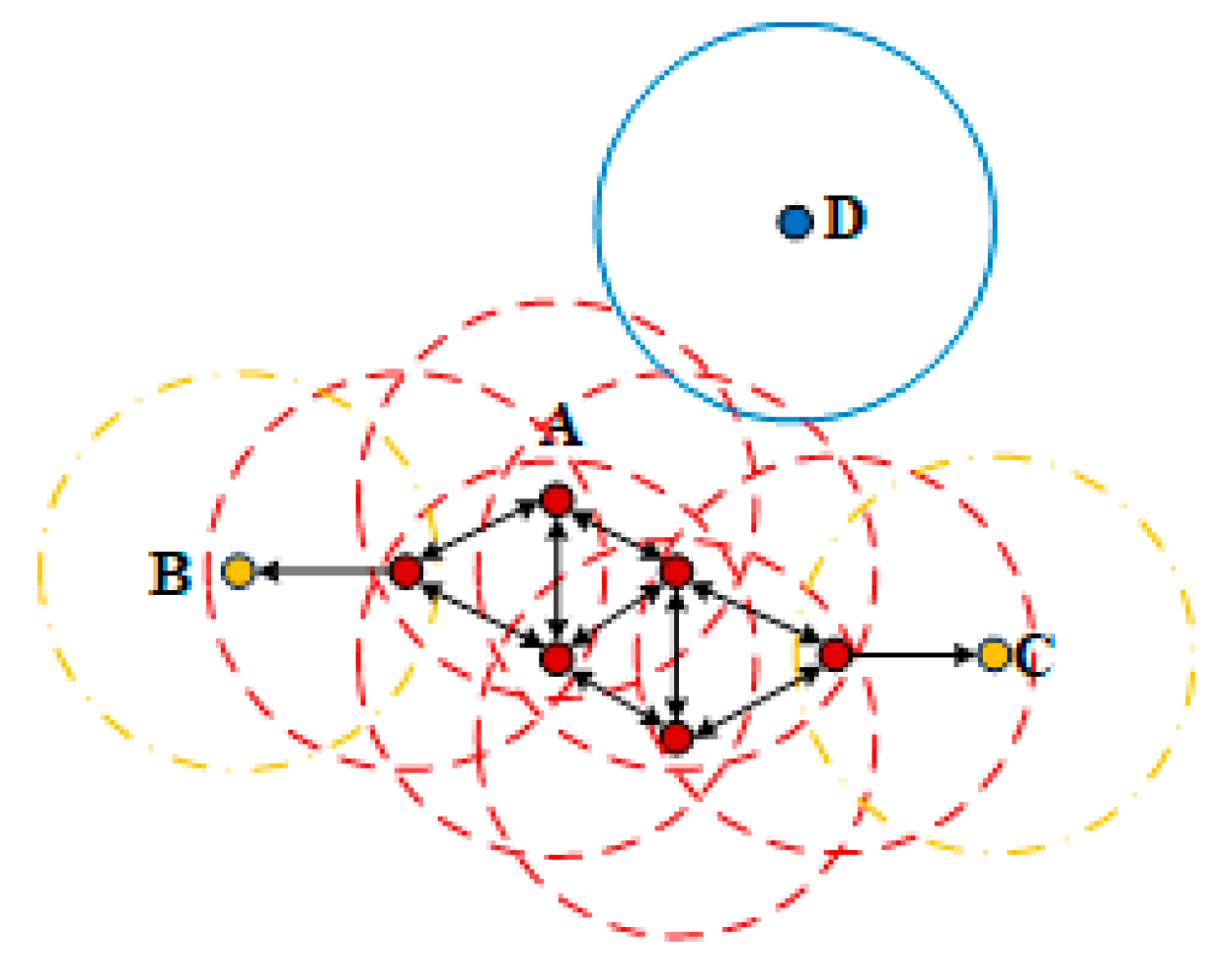
2.2. Density-Based Spatial Clustering of Application with Noise Based Sensors FDI Scheme
- Calculate the distance between any that is denoted as :
- The -neighborhood of , denoted by , is a subset of that . The radius is the key to ensure correct clustering. If the radius is too small, the false alarm rate (FAR) will increase. Conversely, missing alarm rate (MAR) will increase. In this paper, the radius is considered as the maximum in the training data set where there is no sensor fault.
- If , then is defined as a core point. is defined as 1 with the consideration that when only a single sensor fails it also should be in a single cluster. In other words, the concepts of border points and noise points are abandoned in our proposed DBSCAN algorithm.
2.3. Residual-Based Sensor Fault Estimation Scheme
3. Observability of Corrected Equilibrium Manifold Expansion Model
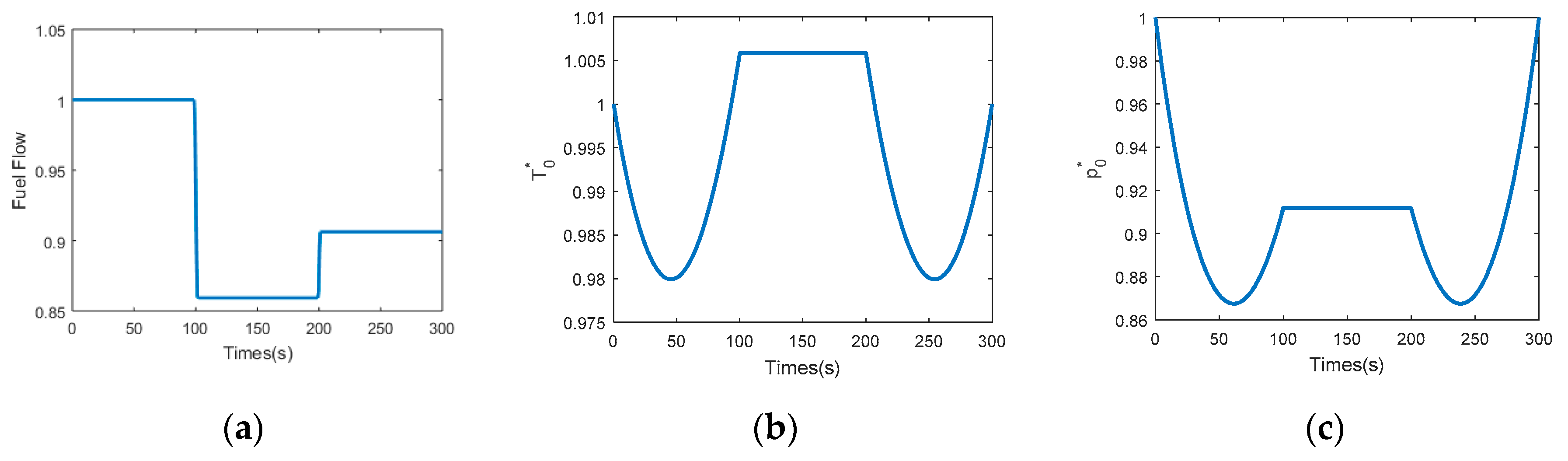
4. Simulation Experiment Preparation and Description
4.1. Experimental Data and Model
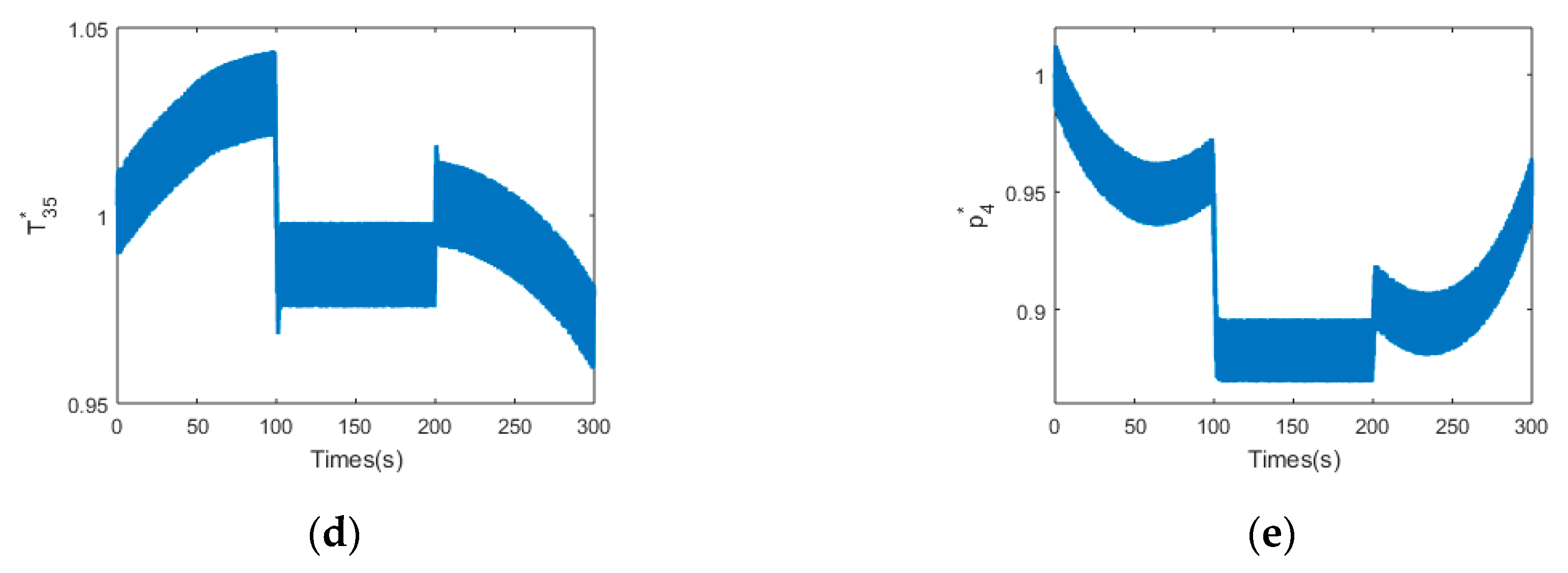
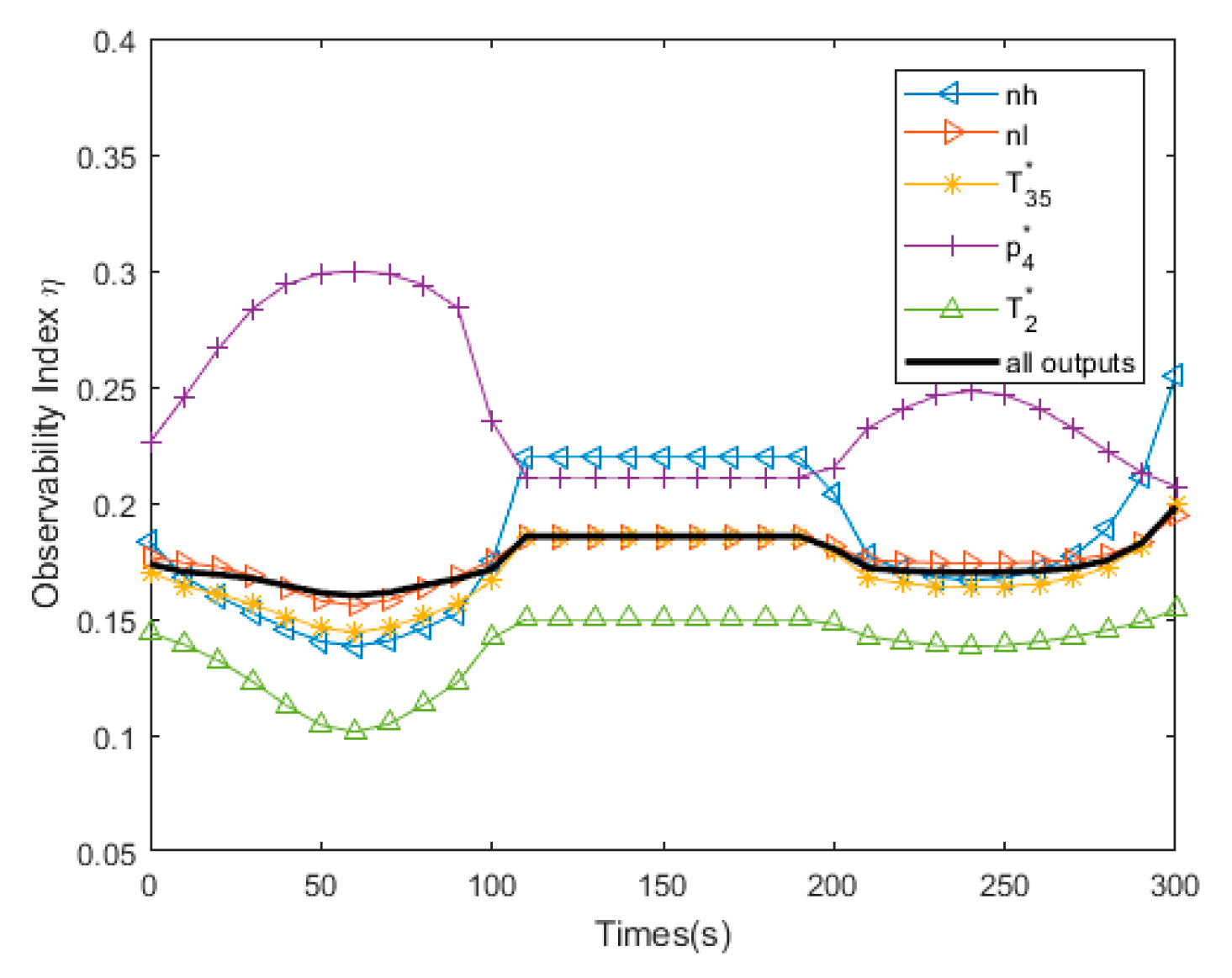
4.2. Observability Analysis of CEME Model
4.3. Determination of Alarm Threshold
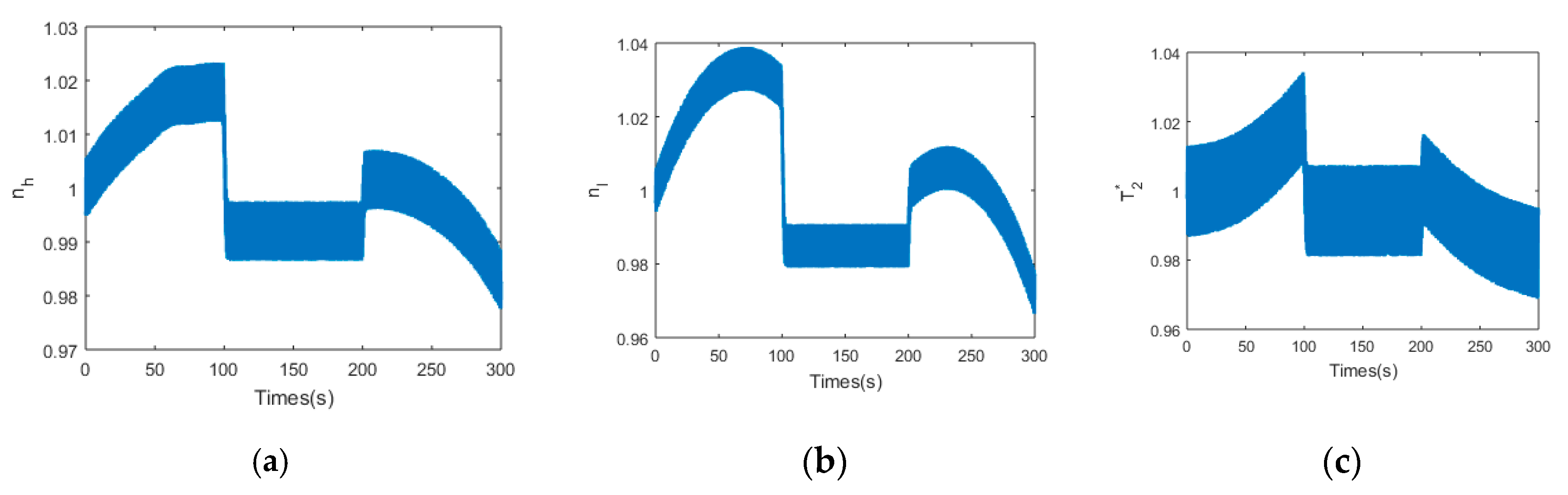
5. Simulation Results
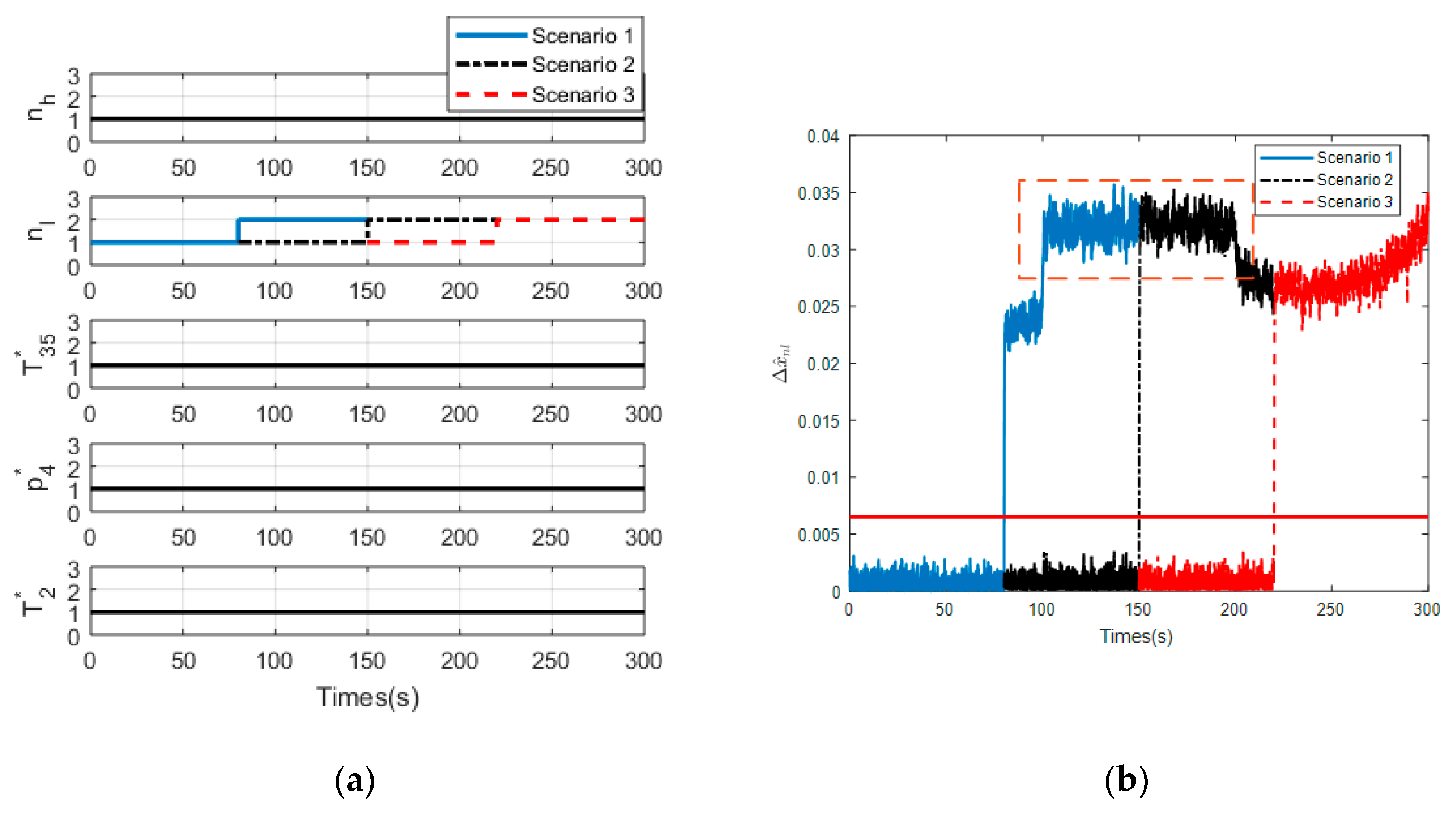
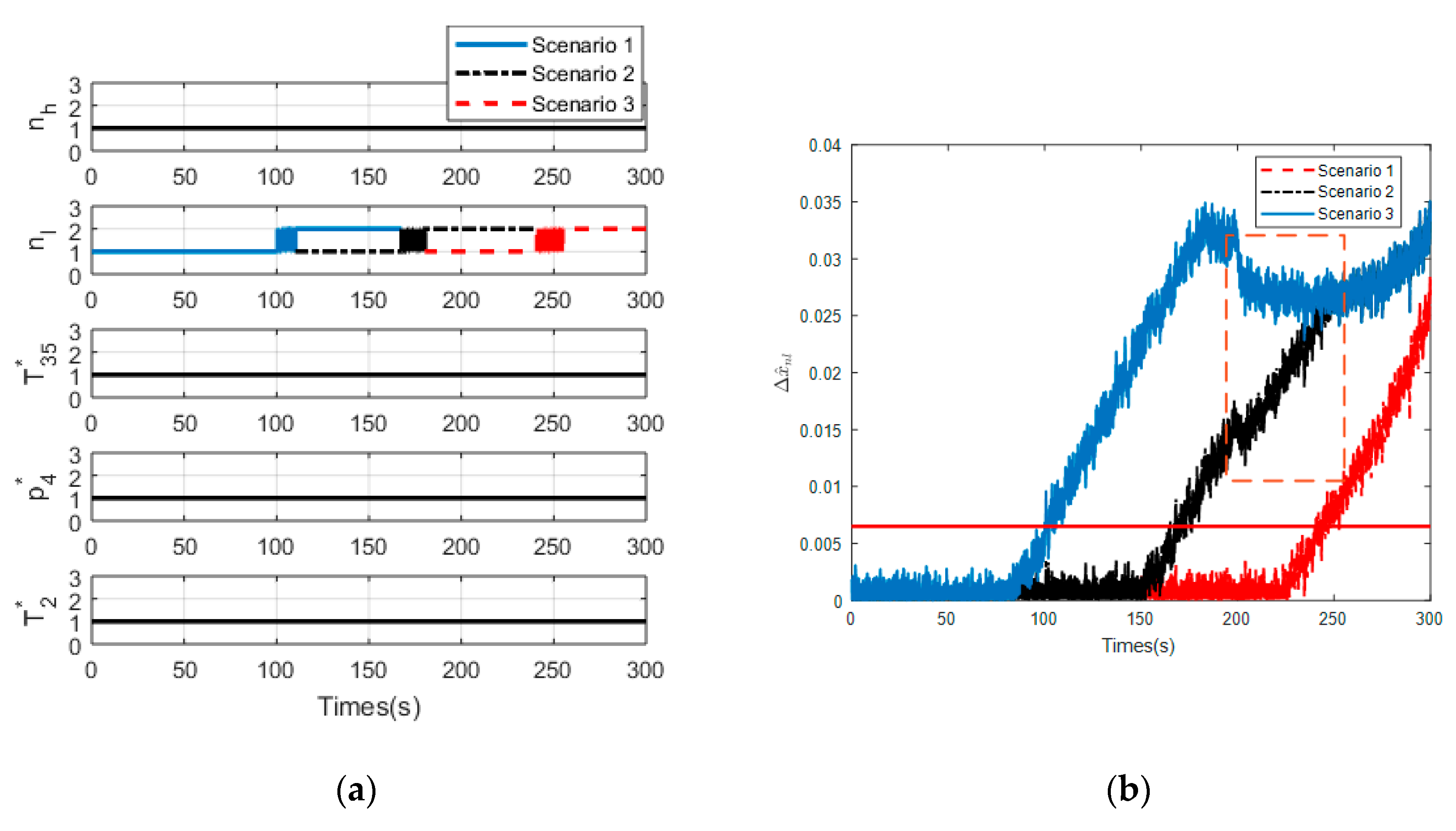
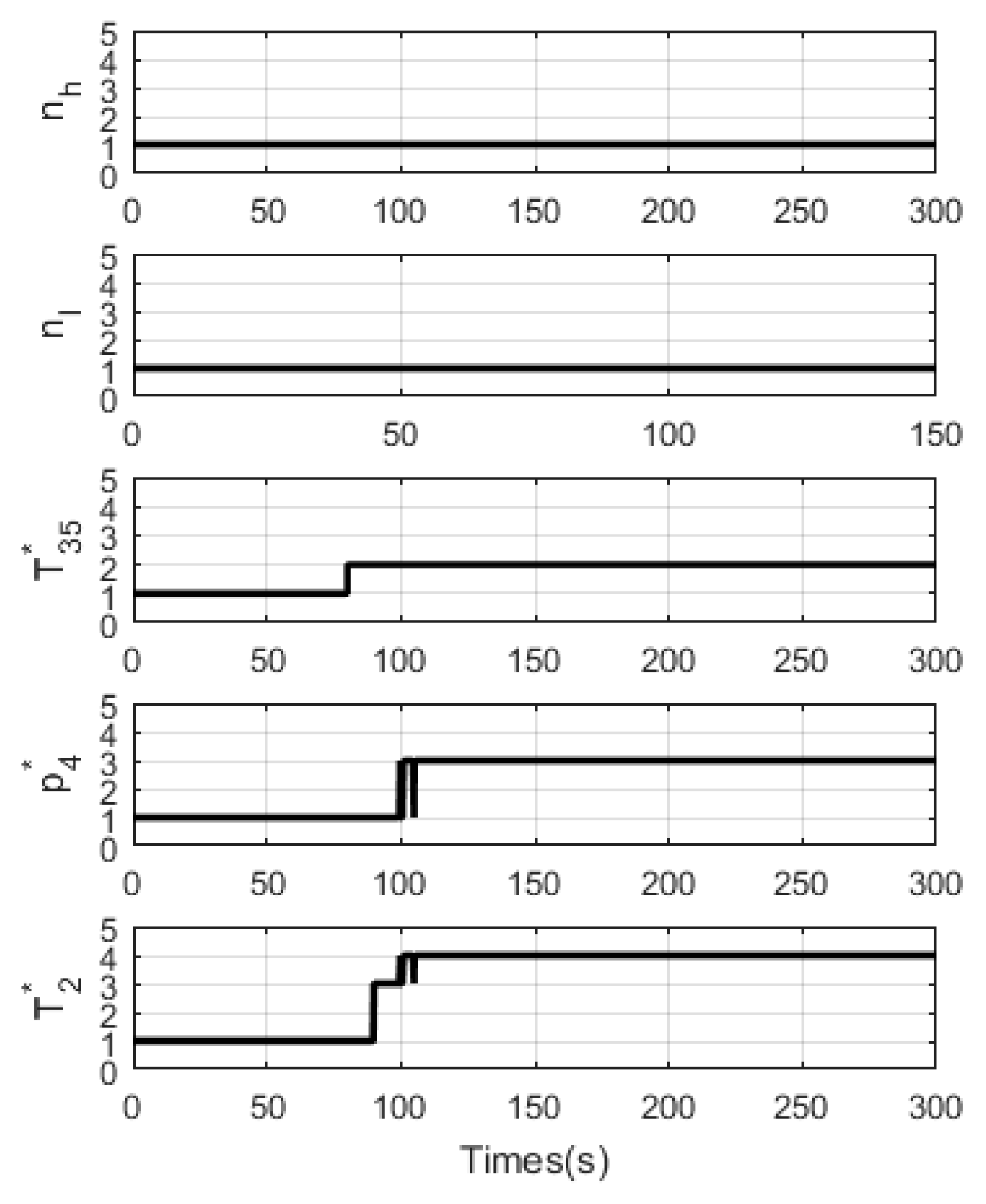
5.1. Single Sensor FDI&E Results
5.2. Concurrent Sensors FDI&E Results
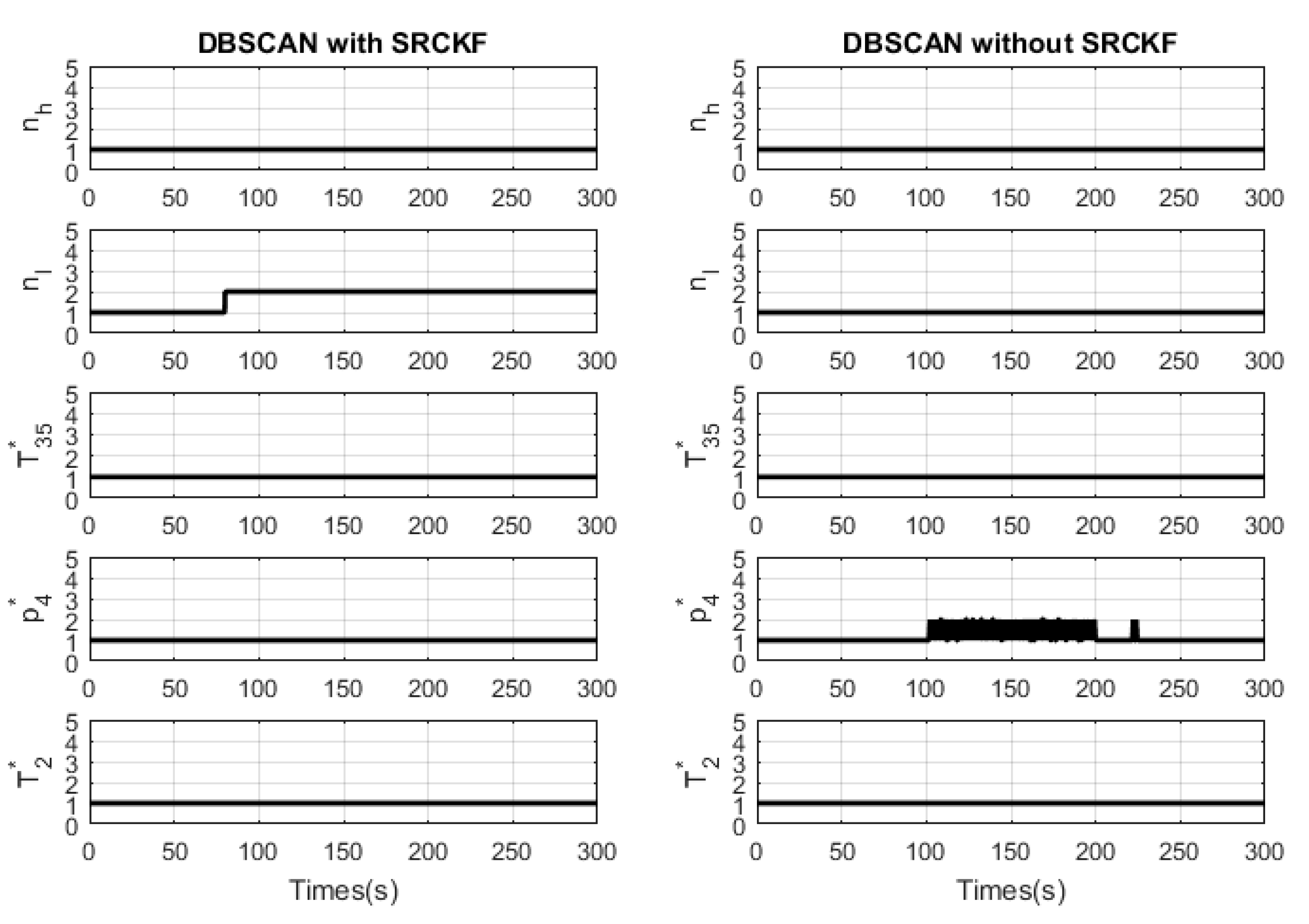
5.3. Comparison Experiments
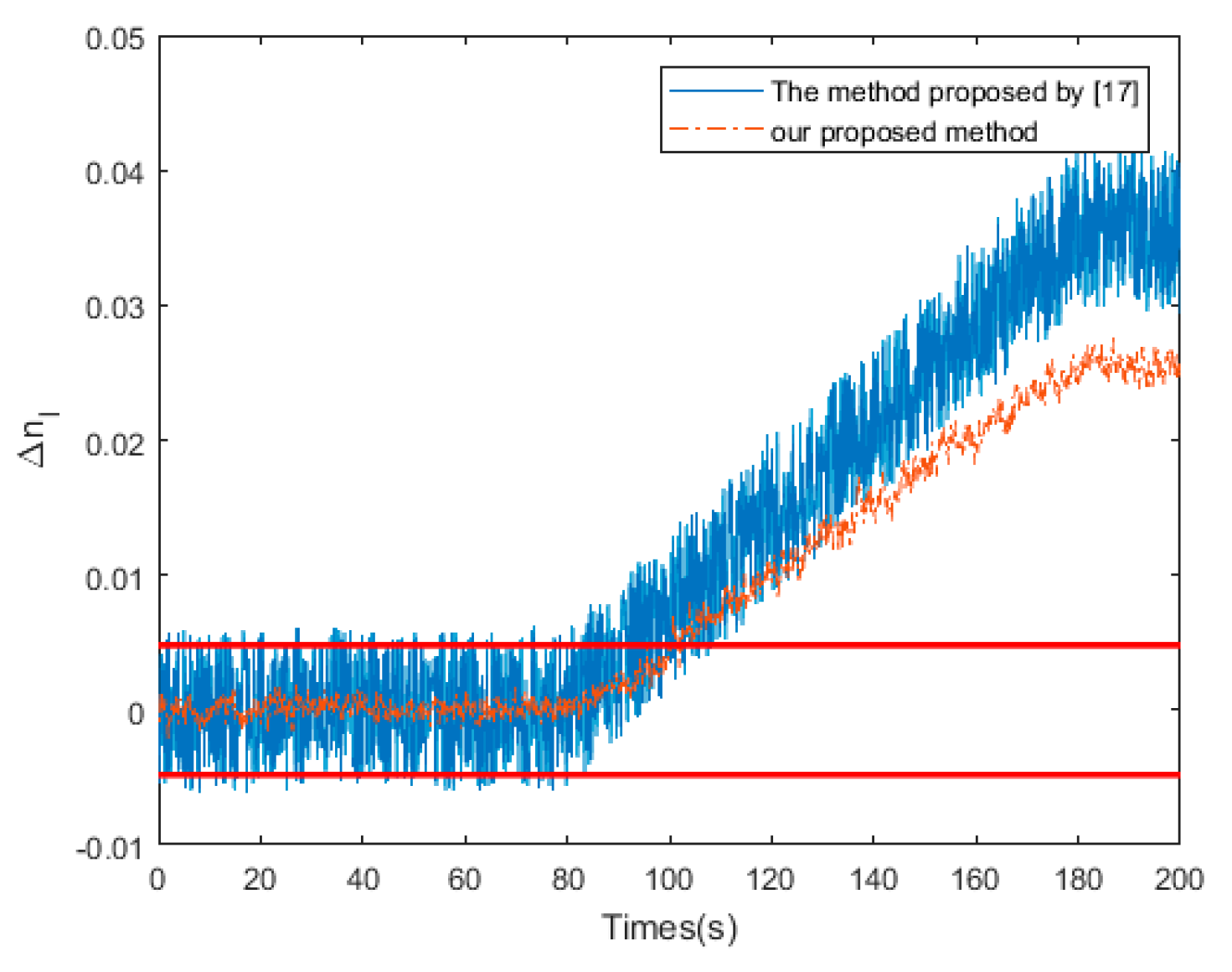
5.3.1. Robustness Analysis Experiment 1
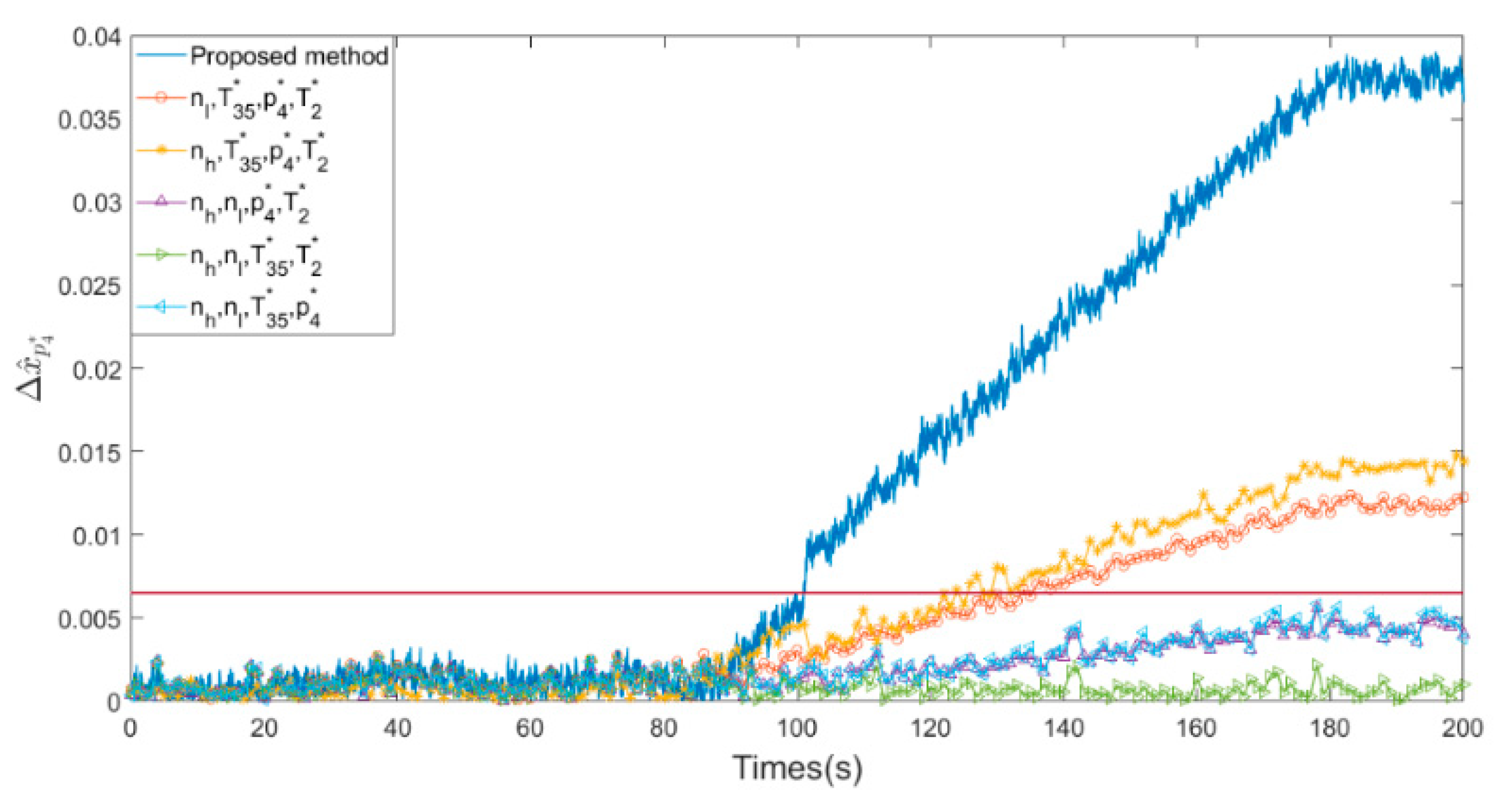
5.3.2. Robustness Analysis Experiment 2
5.3.3. Sensitivity Analysis Experiment
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix A.1. Square Root Cubature Kalman Filter Algorithm

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Initialize with: | |
| where is the Cholesky decomposition of matrix , , is an upper triangular matrix, and represents the expectation. | |
| Evaluate the cubature points and time update : | |
| where , , , is the column of the set [1] that represents | |
| Measurement update: | |
Appendix A.2. Corrected Equilibrium Manifold Expansion Model
References
- Liu, J. A dynamic modelling method of a rotor-roller bearing-housing system with a localized fault including the additional excitation zone. J. Sound Vib. 2020, 469, 115144. [Google Scholar] [CrossRef]
- Volponi, A.J. Gas turbine engine health management: Past, present, and future trends. J. Eng. Gas Turb. Power 2014, 136, 051201. [Google Scholar] [CrossRef]
- Holcomb, C.M.; de Callafon, R.A.; Bitmead, R.E. Closed Loop Nonlinear System Identification Applied to Gas Turbine Analytics. Turbo Expo Power Land Sea Air 2014, 45752, V006T06A013. [Google Scholar]
- Frank, P.M. Fault diagnosis in dynamic systems using analytical and knowledge-based redundancy: A survey and some new results. Automatica 1990, 26, 459–474. [Google Scholar] [CrossRef]
- Isermann, R.; Balle, P. Trends in the application of model-based fault detection and diagnosis of technical processes. Control Eng. Pr. 1997, 5, 709–719. [Google Scholar] [CrossRef]
- Hwang, I.; Kim, S.; Kim, Y.; Seah, C.E. A survey of fault detection, isolation, and reconfiguration methods. IEEE Trans. Control Syst. Technol. 2010, 18, 636–653. [Google Scholar] [CrossRef]
- da Silva, J.C.; Saxena, A.; Balaban, E. A knowledge-based system approach for sensor fault modeling, detection and mitigation. Expert Syst. Appl. 2012, 39, 10977–10989. [Google Scholar] [CrossRef]
- Gao, Z.; Cecati, C.; Ding, S.X. A survey of fault diagnosis and fault-tolerant techniques—Part I: Fault diagnosis with model-based and signal-based approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef] [Green Version]
- Salahshoor, K.; Mosallaei, M.; Bayat, M. Centralized and decentralized process and sensor fault monitoring using data fusion based on adaptive extended Kalman filter algorithm. Measurement 2008, 41, 1059–1076. [Google Scholar] [CrossRef]
- Pourbabaee, B.; Meskin, N.; Khorasani, K. Sensor fault detection, isolation, and identification using multiple-model-based hybrid Kalman filter for gas turbine engines. IEEE Trans. Control Syst. Technol. 2015, 24, 1184–1200. [Google Scholar] [CrossRef] [Green Version]
- Zarei, J.; Shokri, E. Robust sensor fault detection based on nonlinear unknown input observer. Measurement 2014, 48, 355–367. [Google Scholar] [CrossRef]
- Lu, F.; Lv, Y.; Huang, J. A model-based approach for gas turbine engine performance optimal estimation. Asian J. Control 2013, 15, 1794–1808. [Google Scholar] [CrossRef]
- Li, L.L.; Zhou, D.H.; Wang, Y.Q. Unknown input extended Kalman filter and applications in nonlinear fault diagnosis. Chin. J. Chem. Eng. 2005, 13, 783–790. [Google Scholar]
- Cao, M.; Qiu, Y.; Feng, Y. Study of wind turbine fault diagnosis based on unscented Kalman filter and SCADA data. Energies 2016, 9, 847. [Google Scholar] [CrossRef]
- Simani, S.; Spina, P.R. Kalman filtering to enhance the gas turbine control sensor fault detection. Theory Pract. Control Syst. 1998, 443–450. [Google Scholar] [CrossRef]
- Kobayashi, T.; Simon, D.L. Evaluation of an enhanced bank of Kalman filters for in-flight aircraft engine sensor fault diagnostics. J. Eng. Gas Turb. Power 2005, 127, 497–504. [Google Scholar] [CrossRef] [Green Version]
- Xue, W.; Guo, Y.; Zhang, X. A bank of kalman filters and a robust kalman filter applied in fault diagnosis of aircraft engine sensor/actuator. In Proceedings of the Second International Conference on Innovative Computing, Informatio and Control (ICICIC 2007), Kumamoto, Japan, 5–7 September 2007. [Google Scholar]
- Yang, Q.; Li, S.; Cao, Y. Multiple model-based detection and estimation scheme for gas turbine sensor and gas path fault simultaneous diagnosis. J. Mech. Sci. Technol. 2019, 33, 1959–1972. [Google Scholar] [CrossRef]
- Kobayashi, T.; Simon, D.L. Hybrid Kalman filter approach for aircraft engine in-flight diagnostics: Sensor fault detection case. Turbo Expo Power Land Sea Air 2006, 42371, 745–755. [Google Scholar]
- Pourbabaee, B.; Meskin, N.; Khorasani, K. Robust sensor fault detection and isolation of gas turbine engines subjected to time-varying parameter uncertainties. Mech. Syst. Signal Pr. 2016, 76, 136–156. [Google Scholar] [CrossRef]
- Sun, R.Z.; Shi, L.C.; Yang, X.L. A coupling diagnosis method of sensors faults in gas turbine control system. Energy 2020, 205, 117999. [Google Scholar] [CrossRef]
- Liu, J.; Liu, J.; Yu, D. Fault detection for gas turbine hot components based on a convolutional neural network. Energies 2018, 11, 2149. [Google Scholar] [CrossRef] [Green Version]
- Sun, X.L.; Wang, N. Gas turbine fault diagnosis using intuitionistic fuzzy fault Petri nets. J. Intell. Fuzzy Syst. 2018, 34, 1–9. [Google Scholar] [CrossRef]
- Hu, J.; Zhang, L.; Liang, W. Dynamic degradation observer for bearing fault by mts-som system. Mech. Syst. Signal Pr. 2013, 36, 385–400. [Google Scholar] [CrossRef]
- Shen, Y.; Khorasani, K. Hybrid multi-mode machine learning-based fault diagnosis strategies with application to aircraft gas turbine engines. Neural Netw. 2020, 130, 126–142. [Google Scholar] [CrossRef] [PubMed]
- Arasaratnam, I.; Haykin, S. Cubature kalman filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef] [Green Version]
- Likas, A.; Vlassis, N.; Verbeek, J.J. The global k-means clustering algorithm. Pattern Recogn. 2003, 36, 451–461. [Google Scholar] [CrossRef] [Green Version]
- Cleophas, T.J. Machine learning in therapeutic research: The hard work of outlier detection in large data. Am. J. Ther. 2016, 23, e837–e843. [Google Scholar] [CrossRef]
- Sharma, A.; Kamola, P.J.; Tsunoda, T. 2D–EM clustering approach for high-dimensional data through folding feature vectors. BMC Bioinform. 2017, 18, 547. [Google Scholar] [CrossRef]
- Schubert, E.; Sander, J.; Ester, M. DBSCAN revisited, revisited: Why and how you should (still) use DBSCAN. ACM T Database Syst. 2017, 42, 1–21. [Google Scholar] [CrossRef]
- Bartosiewicz, Z. Local observability of nonlinear systems. Syst. Control Lett. 1995, 25, 295–298. [Google Scholar] [CrossRef]
- Lee, E.B.; Markus, L. Foundations of Optimal Control Theory; Minnesota University Minneapolis Center for Control Sciences: Minneapolis, MN, USA, 1967. [Google Scholar]
- Zhu, L.; Liu, J.; Zhou, W. An improvement method based on similarity theory for equilibrium manifold expansion model. In Proceedings of the 2019 IEEE International Conference on Power Data Science (ICPDS), Taizhou, China, 12–15 December 2019; pp. 105–108. [Google Scholar]
- Friedland, B. Controllability Index Based on Conditioning Number. J. Dyn. Syst. Meas. Control 1975, 97, 444. [Google Scholar] [CrossRef]
- Yu, D.; Zhao, H.; Xu, Z. An approximate non-linear model for aeroengine control. Proc. Inst. Mech. Eng. Part G 2011, 225, 1366–1381. [Google Scholar] [CrossRef]
- Zhao, H.; Liu, J.; Yu, D. Approximate nonlinear modeling and feedback linearization control for aeroengines. J. Eng. Gas Turb. Power 2011, 133, 111601. [Google Scholar] [CrossRef]
- Li, F.; Zhou, G.; Li, X. A symbolic reasoning based anomaly detection for gas turbine subsystems. In Proceedings of the 2017 Prognostics and System Health Management Conference (PHM-Harbin), Harbin, China, 9–12 July 2017; pp. 1–8. [Google Scholar]
- Foo, G.H.B.; Zhang, X.; Vilathgamuwa, D.M. A sensor fault detection and isolation method in interior permanent-magnet synchronous motor drives based on an extended Kalman filter. IEEE Trans. Ind. Electron. 2013, 60, 3485–3495. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Jia, Y. Location of mobile station with maneuvers using an IMM-based cubature Kalman filter. IEEE Trans. Ind. Electron. 2011, 59, 4338–4348. [Google Scholar] [CrossRef]
- Yan, L.; Zhang, Y.; Xiao, B. Fault detection for nonlinear systems with unreliable measurements based on hierarchy cubature Kalman filter. Can. J. Chem. Eng. 2018, 96, 497–506. [Google Scholar] [CrossRef]
- Chen, X.; Shen, W.; Dai, M. Robust adaptive sliding-mode observer using RBF neural network for lithium-ion battery state of charge estimation in electric vehicles. IEEE Trans. Veh. Technol. 2015, 65, 1936–1947. [Google Scholar] [CrossRef]
- Kim, T.S. Model-based performance diagnostics of heavy-duty gas turbines using compressor map adaptation. Appl. Energy 2018, 212, 1345–1359. [Google Scholar]












| Input: , , Output: Each is associated with a label (faulty sensor or healthy sensor) |
| BEGIN clusterID = 0; for unvisited point in do { mark as visited; = GetNeighborhood(, ); clusterID. = clusterID; // create a cluster containing flag. = core; for in do { if is unvisited then { mark as visited; clusterID.= clusterID; = GetNeighborhood(, ); if then { flag.=core; =Union ; } } } clusterID = clusterID + 1; } Select the biggest cluster and mark points within it as healthy sensors; Select the other clusters and mark points within them as faulty sensors; END |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, L.; Liu, J.; Ma, Y.; Zhou, W.; Yu, D. A Coupling Diagnosis Method for Sensor Faults Detection, Isolation and Estimation of Gas Turbine Engines. Energies 2020, 13, 4976. https://doi.org/10.3390/en13184976
Zhu L, Liu J, Ma Y, Zhou W, Yu D. A Coupling Diagnosis Method for Sensor Faults Detection, Isolation and Estimation of Gas Turbine Engines. Energies. 2020; 13(18):4976. https://doi.org/10.3390/en13184976
Chicago/Turabian StyleZhu, Linhai, Jinfu Liu, Yujia Ma, Weixing Zhou, and Daren Yu. 2020. "A Coupling Diagnosis Method for Sensor Faults Detection, Isolation and Estimation of Gas Turbine Engines" Energies 13, no. 18: 4976. https://doi.org/10.3390/en13184976