Research on Synchronverter-Based Regenerative Braking Energy Feedback System of Urban Rail Transit



 and
and 
Abstract
:
1. Introduction
2. Overall Design of Synchronverter-Based Regenerative Braking Energy Feedback System
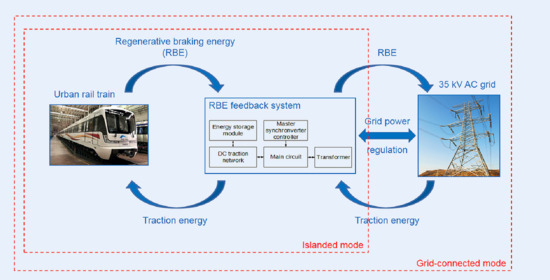
2.1. Structure of the System
2.2. Control Strategy of the System
2.2.1. Overall Control Strategy
2.2.2. Rectifier Control
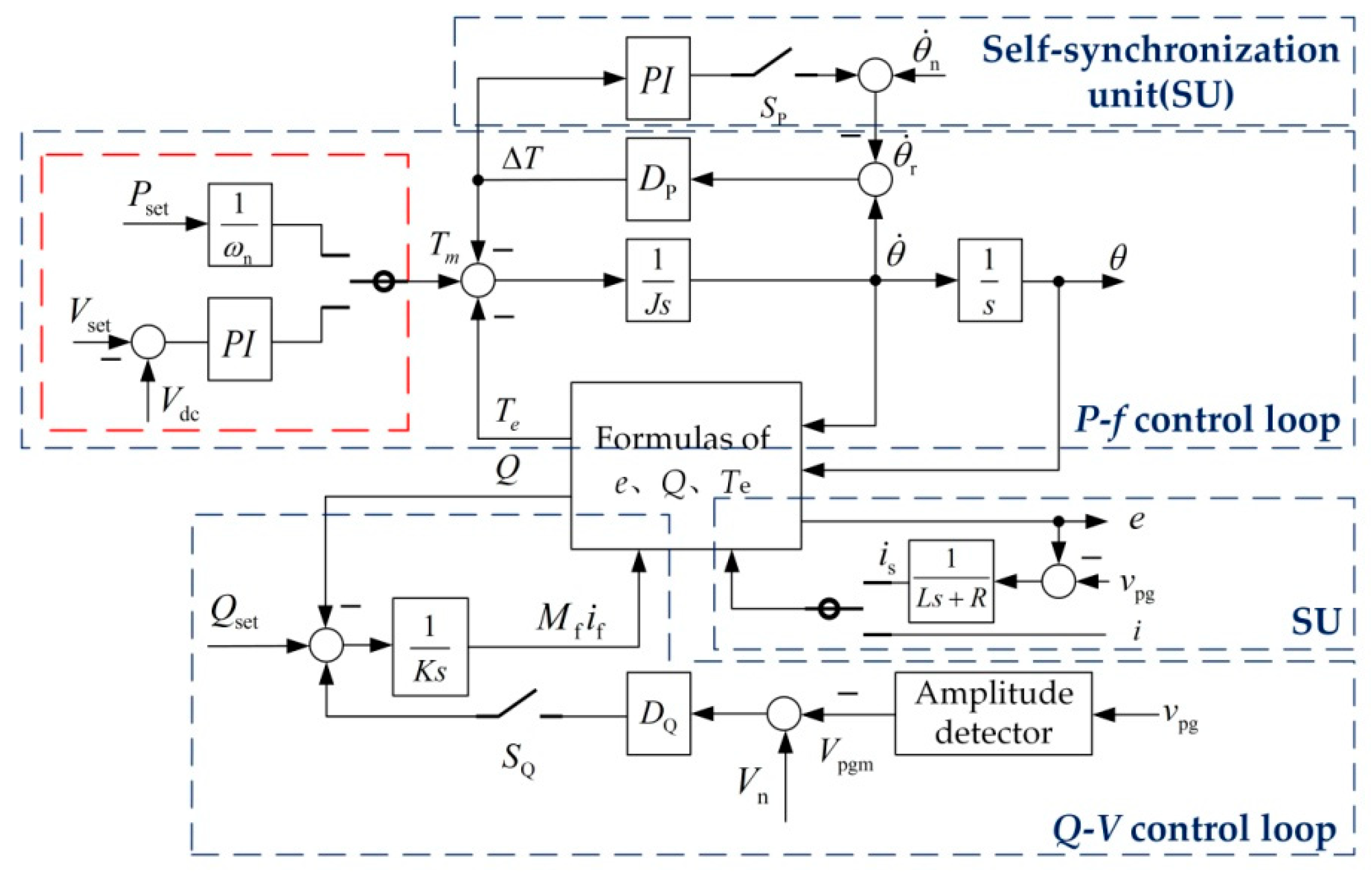
2.2.3. Inverter Control
3. Parameter Design of the System
3.1. System Capacity Design
3.2. Parameter Design of the Master Controller
3.2.1. Parameter Design of the P-f Control Loop
3.2.2. Parameter Design of the DC Bus Voltage Control Loop
3.2.3. Parameter Design of the Q-V Control Loop
4. Results and Discussion
4.1. Simulation Results
4.1.1. Simulation under Grid Normal Condition
- Self-synchronization: The system starts to make self-synchronization with the grid at 0 s.
- Traction: The train accelerates at 3 s, and the traction network voltage drops to 1380 V.
- RBE feedback: The train starts to brake at 9 s, and the traction network rises to 1620 V.
- Q-V control: Grid line voltage rms value drops to 33.25 kV at 15 s and rises to 35 kV at 18 s.
- P-f control: The grid frequency rises to 50.05 Hz at 21 s.
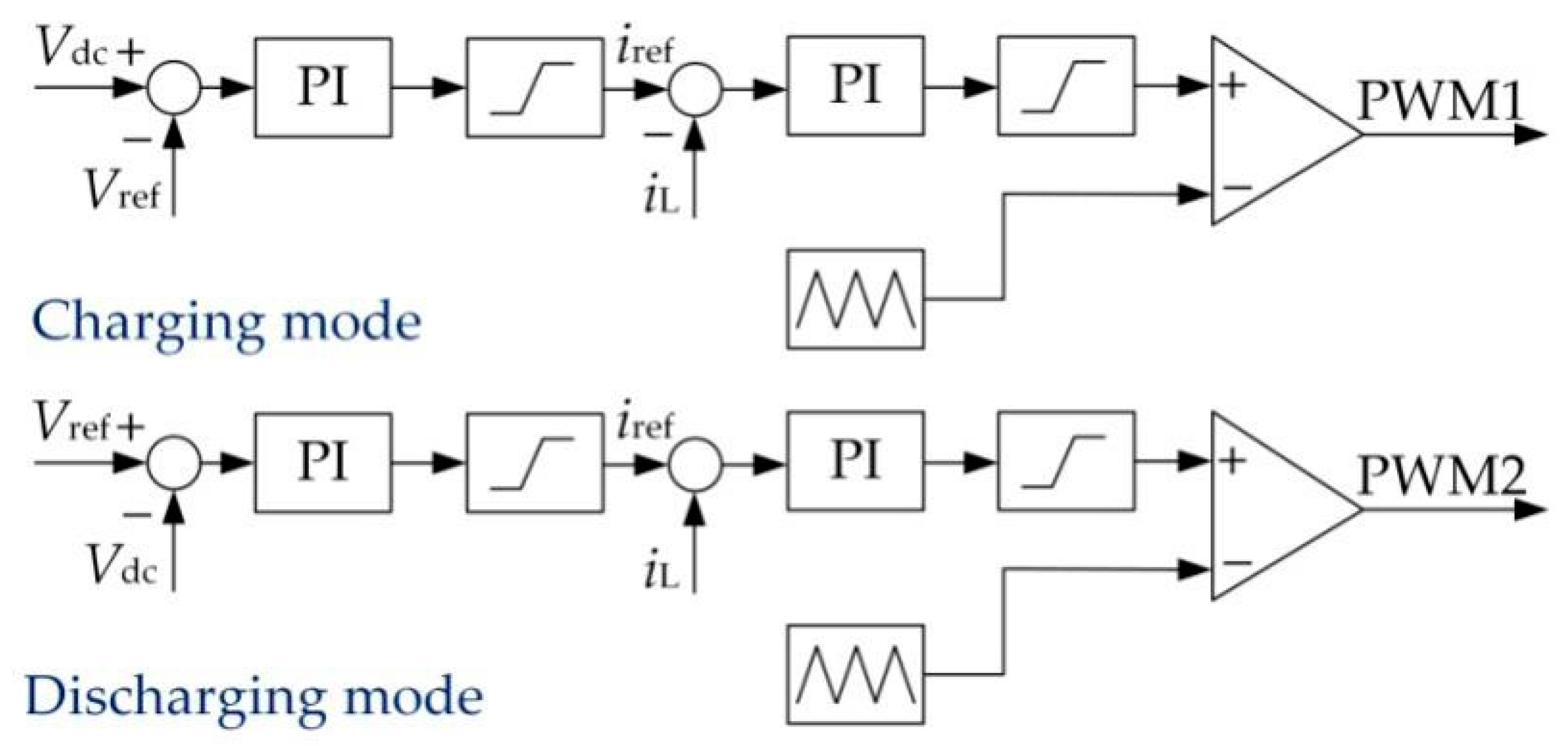
- Charging mode: The traction network voltage rises to 1620 V at 1 s.
- Discharging mode: The traction network voltage drops to 1380 V at 3 s.
- Self-synchronization mode: The system starts to make self-synchronization at 0 s.
- Grid-connection mode: The system is connected to the grid at 2 s.
- P-f control: The grid frequency rises to 50.05 Hz at 3 s.
4.1.2. Simulation under Grid Faults
- The converter is connected to the power grid at 1 s.
- The grid line voltage drops by 50% at 2 s and restores at 2.1 s.
- The grid frequency drops by 1% at 3 s and restores at 3.1 s.
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Charalambous, C.A.; Cotton, I. A holistic stray current assessment of bored tunnel sections of DC transit systems. IEEE Trans. Power Deliv. 2013, 28, 1048–1056. [Google Scholar] [CrossRef]
- Wang, Y.F.; Zhao, Y.; Pang, J. Statistical analysis of urban rail transit lines in 2017 chinal express delivery of annual report on urban rail transit. Urban Mass Transit 2018, 21, 1–6. [Google Scholar]
- Liu, J.; Guo, H.; Yu, Y. Research on the cooperative train control strategy to reduce energy consumption. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1134–1142. [Google Scholar] [CrossRef]
- Bae, C.-H.; Jang, D.-U.; Kim, Y.-G.; Chang, S.-K.; Mok, J.-K. Calculation of regenerative energy in DC 1500V electric railway substations. In Proceedings of the 2007 7th International Conference on Power Electronics, Daegu, Korea, 22–26 October 2007; pp. 801–805. [Google Scholar]
- Yang, Z.; Xia, H.; Wang, B. An overview on braking energy regeneration technologies in Chinese urban railway transportation. In Proceedings of the 2014 International Power Electronics Conference, ASIA, Hiroshima, Japan, 18–21 May 2014; pp. 2133–2139. [Google Scholar]
- Foiadelli, F.; Roscia, M.; Zaninelli, D. Optimization of storage devices for regenerative braking energy in subway systems. In Proceedings of the IEEE Power Engineering Society General Meeting, Montreal, QC, Canada, 18–22 June 2006; pp. 1–6. [Google Scholar]
- Chen, J.F.; Lin, R.; Liu, Y.C. Optimization of an MRT train schedule: Reducing maximum traction power by using genetic algorithms. IEEE Trans. Power Syst. 2005, 20, 1366–1372. [Google Scholar] [CrossRef]
- Yang, X.; Li, X.; Gao, Z.H.; Wang, H.; Tang, T. A cooperative scheduling model for timetable optimization in subway systems. IEEE Trans. Intell. Transp. Syst. 2013, 14, 438–447. [Google Scholar] [CrossRef]
- Su, S.; Li, X.; Tang, T.; Gao, Z. A subway train timetable optimization approach based on energy-efficient operation strategy. IEEE Trans. Intell. Transp. Syst. 2013, 14, 883–893. [Google Scholar] [CrossRef]
- Dominguez, M.; Fernández-Cardador, A.; Cucala, A.P.; Pecharromán, R.R. Energy savings in metropolitan railway substations through regenerative energy recovery and optimal design of ATO speed profiles. IEEE Trans. Autom. Sci. Eng. 2012, 9, 496–504. [Google Scholar] [CrossRef]
- González-Gil, A.; Palacin, R.; Batty, P. Sustainable urban rail systems: Strategies and technologies for optimal management of regenerative braking energy. Energy Convers. Manag. 2013, 5, 374–388. [Google Scholar] [CrossRef]
- Rufer, A.; Hotellier, D. A supercapacitor-based energy storage substation for voltage compensation in weak transportation networks. IEEE Trans. Power Deliv. 2004, 19, 629–636. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; De Vicuna, L.G.; Castilla, M. Hierarchical control of droop-controlled AC and DC microgrids—A general approach toward standardization. IEEE Trans. Ind. Electron. 2010, 58, 158–172. [Google Scholar] [CrossRef]
- Frilli, A.; Meli, E.; Nocciolini, D.; Pugi, L.; Rindi, A. Energetic optimization of regenerative braking for high speed railway systems. Energy Convers. Manag. 2016, 129, 200–215. [Google Scholar] [CrossRef]
- Zhong, Q.C. Virtual synchronous machines—A unified interface for smart grid integration. IEEE Power Electron. Mag. 2016, 3, 18–27. [Google Scholar] [CrossRef]
- Beck, H.P.; Hesse, R. Virtual synchronous machine. In Proceedings of the 9th International Conference on Electrical Power Quality and Utilization, Barcelona, Spain, 9–11 October 2007; pp. 1–6. [Google Scholar]
- Chen, Y.; Hesse, R.; Turschner, D.; Beck, H.-P. Comparison of methods for implementing virtual synchronous machine on inverters. In Proceedings of the International Conference on Renewable Energies and Power Quality, Santiago de Compostela, Spain, 28–30 March 2012; pp. 414–424. [Google Scholar]
- Gao, F.; Iravani, M.R. A control strategy for a distributed generation unit in grid-connected and autonomous modes of operation. IEEE Trans. Power Deliv. 2008, 4, 850–859. [Google Scholar]
- Zhong, Q.C.; Weiss, G. Synchronverters: Inverters that mimic synchronous generators. IEEE Trans. Ind. Electron. 2010, 58, 1259–1267. [Google Scholar] [CrossRef]
- Zhong, Q.C.; Nguyen, P.L.; Ma, Z. Self-synchronized synchronverters: Inverters without a dedicated synchronization unit. IEEE Trans. Power Electron. 2014, 29, 617–630. [Google Scholar] [CrossRef]
- Zhong, Q.-C.; Ma, Z.; Ming, W.-L.; Konstantopoulos, G. Grid-friendly wind power systems based on the synchronverter technology. Energy Convers. Manag. 2015, 8, 719–726. [Google Scholar] [CrossRef]
- Ming, W.L.; Zhong, Q.C. Synchronverter-based transformerless PV inverters. In Proceedings of the IECON 2014 40th Annual Conference of the IEEE Industrial Electronics Society, Dallas, TX, USA, 29 October–1 November 2014; pp. 4396–4401. [Google Scholar]
- Nguyen, P.L.; Zhong, Q.C.; Blaabjerg, F. Synchronverter-based operation of STATCOM to mimic synchronous condensers. In Proceedings of the 2012 7th IEEE Conference on Industrial Electronics and Applications (ICIEA), Singapore, 18–20 July 2012; pp. 942–947. [Google Scholar]
- Boldea, I. Control issues in adjustable speed drives. IEEE Ind. Electron. Mag. 2008, 2, 32–50. [Google Scholar] [CrossRef]
- Lu, Y.; Zhao, Y.; Zhao, X.; Li, G.; Zhang, C. Status analysis of regenerative braking energy utilization equipment in urban rail transit. In Proceedings of the 2017 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Harbin, China, 7–10 August 2017; pp. 1–6. [Google Scholar]
- Liserre, M.; Teodorescu, R.; Blaabjerg, F. Stability of photovoltaic and wind turbine grid-connected inverters for a large set of grid impedance values. IEEE Trans. Power Electron. 2006, 21, 263–272. [Google Scholar] [CrossRef]
- Dannehl, J.; Wessels, C.; Fuchs, F.W. Limitations of voltage oriented PI current control of grid-connected PWM rectifiers with LCL filters. IEEE Trans. Ind. Electron. 2009, 56, 380–388. [Google Scholar] [CrossRef]
- Wang, J.; Yan, J.D.; Jiang, L.P. Seudo-derivative-feedback current control for three-phase grid-connected inverters with LCL filters. IEEE Trans. Power Electron. 2016, 31, 3898–3912. [Google Scholar] [CrossRef] [Green Version]
- Loh, P.C.; Holmes, D.G. Analysis of multiloop control strategies for LC/CL/LCL-filtered voltage-source and current-source inverters. IEEE Trans. Ind. Appl. 2005, 41, 644–654. [Google Scholar] [CrossRef]
- Zhong, Q.C.; Ma, Z.; Nguyen, P.L. PWM-controlled rectifiers without the need of an extra synchronization unit. In Proceedings of the IECON 2012–38th Annual Conference IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 691–695. [Google Scholar]
- Zheng, T.C. Urban Rail Transit Traction Power Supply System; China Railway Publishing House: Beijing, China, 2004. [Google Scholar]
- Lee, C.H.; Lu, C.J. Assessment of grounding schemes on rail potential and stray currents in a DC transit system. IEEE Trans. Power Deliv. 2006, 21, 1941–1947. [Google Scholar] [CrossRef]
- Zaboli, A.; Vahidi, B.; Yousefifi, S.; Hosseini-Biyouki, M.M. Evaluation and control of stray current in dc-electrified railway systems. IEEE Trans. Veh. Technol. 2017, 66, 974–980. [Google Scholar] [CrossRef]
- Chen, S.-L.; Hsu, S.-C.; Tseng, C.-T.; Yan, K.-H.; Chou, H.-Y.; Too, T.-M. Analysis of rail potential and stray current for taipei metro. IEEE Trans. Veh. Technol. 2006, 55, 67–75. [Google Scholar] [CrossRef]
- Xu, S.; Li, W.; Wang, Y. Effects of vehicle running mode on rail potential and stray current in DC mass transit systems. IEEE Trans. Veh. Technol. 2013, 62, 3569–3580. [Google Scholar]
- Chen, Y.; Chen, Y. Electric propulsion system of metro vehicle for Chengdu metro line 1. Railw. Locomot. Car 2009, 29, 52–55. [Google Scholar]
- Davis, W.J. The Tractive Resistance of Electric Locomotives and Cars; General Electric: Boston, MA, USA, 1926. [Google Scholar]
- Li, S.T.; Wu, S.R.; Yang, P.; He, S. Research on sychronverter-based regenerative braking energy feedback system of urban rail trains. In Proceedings of the 2019 14th IEEE Conference on Industrial Electronics and Applications (ICIEA), Xi’an, China, 19–21 June 2019. [Google Scholar]
- Trinh, Q.; Choo, F.H.; Wang, P. Control strategy to eliminate impact of voltage measurement errors on grid current performance of three-phase grid-connected inverters. IEEE Trans. Ind. Electron. 2017, 64, 7508–7519. [Google Scholar] [CrossRef]
- Yao, Z.; Xiao, L.; Guerrero, J.M. Improved control strategy for the three-phase grid-connected inverter. IET Renew. Power Gener. 2015, 9, 587–592. [Google Scholar] [CrossRef] [Green Version]
- Gao, B.T.; Xia, C.P.; Zhang, L.; Chen, N. Modeling and parameters design for rectifier side of VSC-HVDC based on virtual synchronous machine technology. Proc. CSEE 2017, 37, 534–544. [Google Scholar]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Rated DC bus voltage Vdc | 1500 V |
| Distance between stations s | 3800 m |
| Maximum speed of the train v | 80 km/h |
| Maximum braking force of the train Z | 320 kN |
| Weight of the train M | 300 t |
| Alex number of the train n | 24 |
| Carriage number of the train N (4M2T) | 6 |
| Front area of the train A | 10 m2 |
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| Cdc | 40 μF | Rdc | 0.03 Ω | Ls | 0.02 mH |
| Lg | 0.015mH | Rs | 0.005 Ω | Rg | 0.004 Ω |
| C | 127 μF | Rc | 1000 Ω | R | 0.002 Ω |
| L | 0.002mH | DP | 1.62 × 104 | DQ | 9.8 × 104 |
| J | 16.21 | K | 6.16 × 106 | kpf | 5 × 10−6 |
| kif | 5 × 10−5 | kpv | 50 | kiv | 650 |
| Vut | 1550 V | fut | 50.05 Hz | flt | 49.95 Hz |
| vut | 36 kV | vlt | 34 kV | Vb | 1200 V |
| Rb | 0.03 Ω | Lg | 0.015 mH | Rg | 0.004 Ω |
| Lb | 0.1 mH | Cb | 68 μF | kpv | 100 |
| Kiv | 1200 | kpi | 1 | Kii | 120 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Wu, S.; Xiang, S.; Zhang, Y.; Guerrero, J.M.; Vasquez, J.C. Research on Synchronverter-Based Regenerative Braking Energy Feedback System of Urban Rail Transit. Energies 2020, 13, 4418. https://doi.org/10.3390/en13174418
Li S, Wu S, Xiang S, Zhang Y, Guerrero JM, Vasquez JC. Research on Synchronverter-Based Regenerative Braking Energy Feedback System of Urban Rail Transit. Energies. 2020; 13(17):4418. https://doi.org/10.3390/en13174418
Chicago/Turabian StyleLi, Shuting, Songrong Wu, Shiqiang Xiang, Yabo Zhang, Josep M. Guerrero, and Juan C. Vasquez. 2020. "Research on Synchronverter-Based Regenerative Braking Energy Feedback System of Urban Rail Transit" Energies 13, no. 17: 4418. https://doi.org/10.3390/en13174418