1. Introduction
Wave energy is a promising sector for sustainable low-carbon energy production. However, despite the efforts made in the last decade, uncertainties in wave energy performance and cost remain. In 2016, survivability assessment has been identified as the main WEC concern in the five years to come by the Collaborative Computational Project in Wave Structure Interaction (CCP-WSI) Working Group [
1]. Numerical modelling can play a key role in the assessment of extreme responses that are necessary to the understanding of WEC capacity to survive extreme conditions.
WECs are subjected to complex hydrodynamics phenomena, such as slamming waves or green water effect. Numerical models that are based on the weakly simplified Navier–Stokes equations, assumed of ‘high-fidelity’ (
Figure 1), are necessary to model such hydrodynamics and the interaction with the device, whereas numerical models of ‘lower fidelity’ (
Figure 1) are restricted by the assumptions made on the fluid properties (e.g., inviscid, or small displacement) or the equations solving procedure (e.g., linear potential flow). Therefore, their use is debatable for survivability assessment of WEC, which, in the meantime, justifies the use of CFD models ([
2,
3,
4], among others).
However, assumed high-fidelity codes like CFD are too time-consuming for routine design use in industry [
1]. Codes of lower fidelity are used instead, although being based on major physical assumptions inducing concerning uncertainties, especially in surge and pitch [
5]. Inaccurate estimations of extreme response often lead to conservative design decisions that lower the commercial viability of a device [
6]. In addition, lower fidelity models were developed by the Oil and Gas and shipping industries. WECs differ to ships and platforms by their size (i.e., WECs are typically smaller) and their motion, which should be accentuated to generate power. Viscous effects tend to become more important for WECs, whereas diffraction and radiation effects tend to decrease. Hence, when radiation diffraction effects dominate viscous effects, Oil&Gas low-fidelity numerical models that are based on simplified physics remain reliable; whereas, when viscous effects dominate, high-fidelity numerical models, like CFD, are justified. During a given simulation—especially for a long irregular sea-state—the regime is likely to change from one to the other.
Uncertainties remain regarding which numerical model to use for a given application. At best, numerical models are classified, depending on the physical processes represented (i.e., wave-breaking, wave non-linearity) [
7]. The absence of a parametric study function of a wave-parameter makes the choice of the selected model for survivability vague. For long extreme irregular sea-states—as recommended by WEC standards (IEC TS 62600-2 [
8])—CFD only simulations remain unaffordable, and so the use of CFD is restricted to single short extreme events [
1]. However, in large waves up to the breaking point, Coe et al. [
9] argue that lower fidelity models are the most efficient, since they give good agreement for a fraction of the computational cost. On the other hand, the accuracy of Degree of Freedoms (DoFs) other than heave is lower due to viscous effects [
5] that have a greater impact on pitch and surge than on heave, hence requiring CFD for their modelisation. Due to this lack of consensus on code selection between low and high fidelity models and where each should be applied, a wave parametric definition for the range of use of each code category [
10] is needed—this is an intrinsic objective of the present study.
Besides, the requirement for long extreme irregular sea-state simulations demonstrates that no numerical model is capable of accurately modelling extreme WSI of WEC at an affordable computational cost. Hybrid models (or coupled models) have emerged to deal with the issue.
Figure 1.
Assumed fidelity of numerical models from the simplifications of Navier–Stokes Equations. Inspired from [
11,
12].
Figure 1.
Assumed fidelity of numerical models from the simplifications of Navier–Stokes Equations. Inspired from [
11,
12].
Coupling between models may be classified as weak compared to strong, and loose compared to tight. When one model runs before the other in a unidirectional exchange of information, the coupling is weak [
13]. This strategy initialises one model by outputs from the other. When the exchange of information is two-way, the coupling is strong, and each model is run simultaneously, thus exchanging information and benefiting from each model’s feature during the entire simulation. Tight-coupling is a strongly coupled model, where the two models converge to the same time-step before advancing to next [
14]. In loose coupling, the time-step of a model is not imposed on the other.
Three mains coupling strategies exist: toolbox, zonal-splitting, and time-splitting. The toolbox technique (or function-splitting) uses an external model to simulate a specific component, for example, the mooring line. Palm et al. [
15] use the mooring software MooDy (in-house) to describe catenary lines, where the modelling of the Rigid Body Motion (RBM) and flow are performed using CFD in OpenFOAM. A similar development is done by de Lataillade et al. [
16] between the CFD solver PROTEUS [
17] and the multi-body dynamics ProjectCHRONO [
18]. However, although it improves solution accuracy, this strategy increases computational power due to communication between solvers.
A second strategy is a zonal or space-splitting approach. It has been given much attention recently, since it specifically aims to reduce computational cost. Li et al. [
19], Hildebrandt et al. [
20], Lachaume et al. [
21], Paulsen et al. [
22], and Biausser et al. [
23] weakly coupled a two-phase Navier-Stokes (NS)-Volume of Fluid (VoF) model with a Fully Nonlinear Potential Theory (FNPT) based model solved using the Finite Element Method (FEM) (QALE-FEM) and the Boundary Element Method (BEM), respectively. In these studies, the NS model uses the inputs from the FNPT based model. Hildebrandt et al. [
20] justify the use of the weak coupling since no wave reflection comes from the structure located in the NS sub-domain before the extreme event of interest reaches it. Hence, the 3-dimensions (
) simulation made using the NS solver is limited to immediately before the impact and the impact itself. Strong coupling is often required for long simulations, since sub-domains will affect one other [
24]. A relaxation-zone (or sponge layer) or an interface provides the connection between sub-domains. Lachaume et al. [
21] further develop the weakly coupled into a strongly coupled model by creating a region where both FNPT and NS-VoF sub-domains overlap. Kim et al. [
25] use the relaxation-zone technique between a BEM-FNPT sub-domain and a NS-VoF originally developed by Yan et al. [
26] for a similar two-way coupling. A drawback of the strongly coupled zonal strategy is that the time-consuming model (i.e., CFD) is used during the whole simulation regardless of the complexity of the event, even in cases where such fidelity is not required. Therefore, there is a period in time and a region on space, where WSI requires such a level of accuracy and, outside this period, lower fidelity models are accurate enough and should be used.
Therefore, the present study develops a coupling based on the time-splitting strategy: a hybrid method that swaps between models for specific periods, depending on an indicator function of the model validity. It is similar to the strategy developed by Wang et al. [
27], where three wave models (QSBI, ESBI, ENLSE-5F) for large temporal and spatial scale simulations are ranked by order of validity assumed from underlying equations in order to use the most efficient model (i.e., accurate while minimising computational cost) as a function of the instantaneous wave information. The present hybrid model uses the computationally efficient WaveDyn [
28] model (time-domain linear potential flow, i.e., Cummins Equation) to rule the simulation until the WSI requires CFD to maintain solution fidelity. The most appropriate model is always used, which results in a reduction of the overall computational power that is required for the simulation.
The aim of this work is, therefore, to develop a computational tool that is both capable of simulating accurate extreme WSI and is at an affordable computational cost. The strategy employed is the coupling of WaveDyn with OpenFOAM [
29]. The original contribution of the present coupling is the assessment and definition of WaveDyn validity limit as a function of a wave-parameter that rules the coupling (i.e., choose the solver).
Present work is presented first with the overall method, including the coupling strategy, the experimental set-up, and the numerical models. The result section quantifies the fidelity of the linear potential flow model WaveDyn when compared with OpenFOAM, demonstrating the existence of a validity limit and motivating the present coupling strategy. Once the validity limit is identified and parametrically characterised, the coupling strategy is developed. Fully detailed development is available in [
30].
4. Conclusions
In this study, the mid-fidelity time domain potential flow solver WaveDyn is weakly coupled while using a time-splitting strategy to the CFD-NWT validated for extreme WSI developed in OpenFOAM-4.1. A new time-splitting strategy is introduced, which switches between models at times, depending on WaveDyn’s validity limit, caused by inviscid and small rigid-body displacement assumptions. During the coupling, WaveDyn receives the OpenFOAM RBM solution via an additional load output. The coupled model uses the computationally expensive but more accurate OpenFOAM model when necessary and the less expensive WaveDyn model when this one is valid. This coupling strategy overcomes WaveDyn’s validity limit while reduces computational effort in comparison with CFD only and maintains accuracy.
Both numerical models are first assessed against experiment data for a PA-like buoy motion responses under NewWave extreme events of increasing steepness, and of various shapes. OpenFOAM is validated for all events and all DoFs; hence, for . WaveDyn deviates from experiment in surge since it does not capture low frequency large responses due to linear potential flow assumptions. Even so, heave and pitch responses are well captured, WaveDyn is not validated for extreme WSI because of the importance of rigid-body surge position on following responses for dynamics structures.
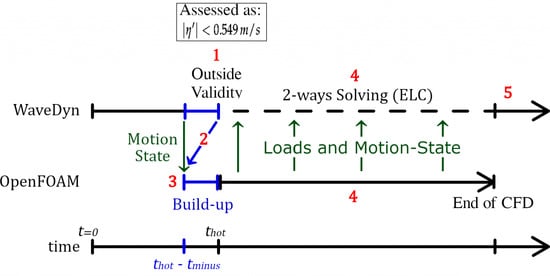
Times where WaveDyn surge response deviates from experiment—due to a large low frequency response not captured—are used to identify WaveDyn’s validity limit. The vertical velocity of the surface elevation (i.e., derivative with respect to time, ) is introduced as the wave parameter relating to instantaneous steepness and inertia forces since WaveDyn ignores viscous effects. Large instantaneous steepness values demonstrate a relation with large low frequency response. Therfore, WaveDyn’s validity limit is assessed at . Above the limit, WaveDyn surge response is expected to deviate, meaning that CFD is required to accurately capture all DoF.
Finally, the proof of concept of the coupling is demonstrated. OpenFOAM starts when WaveDyn validity limit is estimated as attained, from WaveDyn RBM solution (i.e., position, velocity, and acceleration) and the imposed linear superposition for the wave-field (developed in [
31]). Coupling demonstrates interest using the least steep event by reducing the computational effort by
while maintaining accuracy to the level of CFD-only. A result considered to be applicable to the other events. A long irregular sea-state is used to indicate the coupling potential for long simulations that would be prohibitively expensive for CFD alone.

 ,
, 

 ) is set separately to highlight the difference with other DoF.
) is set separately to highlight the difference with other DoF. ) when compared to OpenFOAM (----□----), as shown by Figure 8a. Below the breaking limit, the heave motion responses are mainly dictated by the surface-elevation. WaveDyn uses the linear superposition of a WG measurement aligned with the buoy centre at the initial position, while OpenFOAM tries to reproduce the propagation of a non-linear wave-group from a linear superposition at the position of the most upstream WG imposed at the inlet, which inevitably introduces inaccuracies, compared to the physical measurements, as the linear description does not properly account for nonlinearities that are present in the wave-group. It also means that OpenFOAM’s surface elevation solution at the position of the buoy appears to be weaker when compared to WaveDyn, as the simulation of the wave propagation is imperfect. Figure 8a shows that the difference in the accuracy of the surface-elevation between OpenFOAM (– –∇– –) and WaveDyn (
) when compared to OpenFOAM (----□----), as shown by Figure 8a. Below the breaking limit, the heave motion responses are mainly dictated by the surface-elevation. WaveDyn uses the linear superposition of a WG measurement aligned with the buoy centre at the initial position, while OpenFOAM tries to reproduce the propagation of a non-linear wave-group from a linear superposition at the position of the most upstream WG imposed at the inlet, which inevitably introduces inaccuracies, compared to the physical measurements, as the linear description does not properly account for nonlinearities that are present in the wave-group. It also means that OpenFOAM’s surface elevation solution at the position of the buoy appears to be weaker when compared to WaveDyn, as the simulation of the wave propagation is imperfect. Figure 8a shows that the difference in the accuracy of the surface-elevation between OpenFOAM (– –∇– –) and WaveDyn (  ) explains WaveDyn’s success in predicting heave motions well.
) explains WaveDyn’s success in predicting heave motions well. )).
)).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}