Virtual Simulation of Electric Bus Fleets for City Bus Transport Electrification Planning


Abstract
:
1. Introduction
2. Pilot Data and Simulation Tool Structure
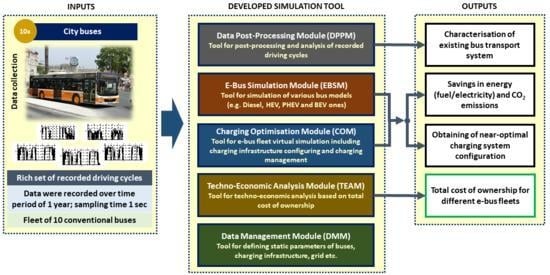
2.1. Recording of Driving Cycle Data
2.2. Organisational Structure of Simulation Tool
3. Data Post-Processing Module (DPPM)
3.1. General Description
3.2. Extraction of Driving Cycles
3.3. Calculation of Vehicle Fleet Statistics
4. E-Bus Simulation Module (EBSM)
4.1. General Description
4.2. Vehicle Modelling
4.2.1. Considered City Buses
4.2.2. Modelling
4.3. Control Strategy
4.4. Simulation Results
5. Charging Optimisation Module (COM)
5.1. General Description
5.2. Charging Management Algorithm
5.3. Obtaining of Near-Optimal Charging System Configurations
5.3.1. PHEV Fleet Case
5.3.2. Case of BEV Fleet
5.4. Comparative Energy Consumption Results
6. Techno-Economic Analysis Module (TEAM)
6.1. General Description and TCO Model
6.2. Simulation Results
7. Conclusions
- (1)
- The considered city bus transport system is such that the city buses are resting in the depot during a relatively short period over the night (typically 3 h), while they are dwelling at end stations for rather significant time (from 10 to 20 min per stay). Therefore, fast charging at end stations (and also in depot for BEV-type buses) relying on stationary chargers equipped with pantograph has been found to be a favourable solution.
- (2)
- The use of a specific, map-based structure of the e-bus model allowed for simulating the bus fleets 20,000 times faster than real time, thus, reducing the full-year 10-bus fleet simulation to a couple of hours on a standard computer workstation.
- (3)
- The comparative virtual simulation results have shown that the use of HEV- and PHEV-type city buses results in reduction of fuel consumption of up to 50% and 70%, respectively, when compared to CONV buses, while BEV buses do not consume fuel at all. The charging system optimisation has shown that the optimal number of end stations equipped with fast chargers is seven (out of 10), where a single reserve bus is marginally needed in the BEV case. The BEV battery capacity can be relatively small (76 kWh) due to the effective opportunity charging and relatively short routes.
- (4)
- The TCO analysis has pointed out that the BEV fleet cannot be competitive to CONV fleet (8.6% higher TCO for BEV vs. CONV), while the HEV fleet is competitive (12.8% lower TCO vs. CONV) and the PHEV fleet is marginally competitive (3.8% lower TCO vs. CONV) in a realistic scenario involving the battery replacement and single reserve bus in the BEV case (Scenario 4). Although the HEV fleet is competitive to the CONV fleet and can reduce the fuel consumption and emissions by up to 50%, it still shares the basic disadvantages of CONV fleet (noisy, no e-drive option in low emission zones, significant emissions).
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AMT | Automated Manual Transmission | ECMS | Equivalent Consumption Minimisation Strategy |
| AT | Automatic Transmission | EV | Electric Vehicle |
| BEV | Battery Electric Vehicle | GPRS | General Packet Radio Service |
| CAN | Controller Area Network | GPS | Global Positioning System |
| COM | Charging Optimisation Module | M/G | Motor/Generator |
| CONV | Conventional (Diesel) Vehicle | PHEV | Plug-In Hybrid Electric Vehicle |
| CS | Charge Sustaining (mode) | RB | Rule-Based (controller) |
| CD | Charge Depleting (mode) | RMI | Registration, Maintenance and Insurance |
| DMM | Data Management Module | SoC | State of Charge |
| DPPM | Data Post-Processing Module | TCO | Total Cost of Ownership |
| EBSM | E-Bus Simulation Module | TEAM | Techno-Economic Analysis Module |
References
- Kumar, R.R.; Alok, K. Adoption of electric vehicle: A literature review and prospects for sustainability. J. Clean. Prod. 2020, 253. [Google Scholar] [CrossRef]
- Das, H.S.; Rahman, M.M.; Li, S.; Tan, C.W. Electric vehicles standards, charging infrastructure, and impact on grid integration: A technological review. Renew. Sustain. Energy Rev. 2020, 120. [Google Scholar] [CrossRef]
- Safoutin, M.J. Predicting the Future Manufacturing Cost of Batteries for Plug-In Vehicles for the U.S. Environmental Protection Agency (EPA) 2017–2025 Light-Duty Greenhouse Gas Standards. World Electr. Veh. J. 2018, 9, 42. [Google Scholar] [CrossRef] [Green Version]
- Tiechert, O.; Chang, F.; Ongel, A.; Lienkamp, M. Joint Optimization of Vehicle Battery Pack Capacity and Charging Infrastructure for Electrified Public Bus Systems. IEEE Trans. Transp. Electrif. 2019, 5, 672–682. [Google Scholar] [CrossRef]
- Zhang, A.; Kang, J.E.; Kwon, C. Multi-day scenario analysis for battery electric vehicle feasibility assessment and charging infrastructure planning. Transp. Res. Part C 2020, 111, 439–457. [Google Scholar] [CrossRef]
- Davidov, S. Optimal charging infrastructure planning based on a charging convenience buffer. Energy 2020, 192. [Google Scholar] [CrossRef]
- Gjelaj, M.; Hashemi, S.; Andersen, P.B.; Traehold, C. Optimal infrastructure planning for EV fast-charging stations based on prediction of user behaviour. IET Electr. Syst. Transp. 2020, 10, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Perera, P.; Hewage, K.; Sadiq, R. Electric vehicle recharging infrastructure planning and management in urban communities. J. Clean. Prod. 2020, 250. [Google Scholar] [CrossRef]
- Cavadas, J.; Homem de Almeida Correia, G.; Gouveia, J. A MIP model for locating slow-charging stations for electric vehicles in urban areas accounting for driver tours. Transp. Res. Part E 2015, 75, 188–201. [Google Scholar] [CrossRef]
- Xiao, D.; An, S.; Cai, H.; Wang, J.; Cai, H. An optimization model for electric vehicle charging infrastructure planning considering queuing behaviour with finite queue length. J. Energy Storage 2020, 29. [Google Scholar]
- Baouche, F.; Billot, R.; Trigui, R.; El Faouzi. Efficient Allocation of Electric Vehicles Charging Stations: Optimization Model and Application to a Dense Urban Network. IEEE Trans. Intell. Transp. Syst. 2014, 6, 33–43. [Google Scholar] [CrossRef]
- Nyman, J.; Olsson, O.; Grauers, A.; Östling, J.; Ohlin, G.; Pettersson, S. A user-friendly method to analyze cost effectiveness of different electric bus systems. In Proceedings of the 30th International Electric Vehicle Symposium & Exhibition, Stuttgart, Germany, 9−11 October 2017. [Google Scholar]
- An, K. Battery electric bus infrastructure planning under demand uncertainty. Transp. Res. Part C 2020, 111, 572–587. [Google Scholar] [CrossRef]
- Xylia, M.; Leduc, S.; Patrizio, P.; Kraxner, F.; Silveira, S. Locating charging infrastructure for electric buses in Stockholm. Transp. Res. Part C 2017, 78, 183–200. [Google Scholar] [CrossRef]
- Hoekstra, A.; Vijayashankar, A.; Sundrani, V.L. Modelling the Total Cost of Ownership of Electric Vehicles in the Netherlands. In Proceedings of the 30th International Electric Vehicle Symposium & Exhibition, Stuttgart, Germany, 9−11 October 2017. [Google Scholar]
- Škugor, B.; Hrgetić, M.; Deur, J. GPS Measurement-based Road Grade Reconstruction with Application to Electric Vehicle Simulation and Analysis. In Proceedings of the 10th Conference on Sustainable Development of Energy, Water and Environment Systems, Dubrovnik, Croatia, 27 September–2 October 2015. [Google Scholar]
- Soldo, J.; Škugor, B.; Deur, J. Optimal Energy Management and Shift Scheduling Control of a Parallel Plug-in Hybrid Electric Vehicle. In Proceedings of the Powertrain Modelling and Control Conference, Loughborough, UK, 10−11 September 2018. [Google Scholar]
- Škugor, B.; Cipek, M.; Deur, J. Control Variables Optimization and Feedback Control Strategy Design for the Blended Operating Mode of an Extended Range Electric Vehicle. SAE Int. J. Altern. Powertrains 2014, 3, 152–162. [Google Scholar] [CrossRef]
- Volvo. Available online: https://www.volvobuses.co.uk/ (accessed on 14 May 2020).
- Guzzella, L.; Sciaretta, A. Vehicle Propulsion Systems, 2nd ed.; Springer: Berlin, Germany, 2007. [Google Scholar]
- Bin, Y.; Li, Y.; Feng, N. Nonlinear dynamic battery model with boundary and scanning hysteresis. In Proceedings of the ASME 2009 dynamic systems and control conference, Hollywood, CA, USA, 12–14 October 2009; pp. 245–251. [Google Scholar]
- Deur, J.; Asgari, J.; Hrovat, D.; Kovač, P. Modeling and Analysis of Automatic Transmission Engagement Dynamics-Linear Case. J. Dyn. Syst. Meas. Control. 2006, 128, 263–277. [Google Scholar] [CrossRef]
- Andersson, C. On Auxiliary Systems in Commercial Vehicles. Doctoral Dissertation, Lund University, Lund, Sweden, November 2004. [Google Scholar]
- Škugor, B.; Deur, J.; Cipek, M.; Pavković, D. Design of a Power-split Hybrid Electric Vehicle Control System Utilizing a Rule-based Controller and an Equivalent Consumption Minimization Strategy. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2014, 228, 631–648. [Google Scholar]
- ZeEUS. Available online: https://zeeus.eu/publications (accessed on 14 May 2020).
- Soldo, J.; Škugor, B.; Deur, J. Synthesis of Optimal Battery State-of-Charge Trajectory for Blended Regime of Plug-in Hybrid Electric Vehicles in the Presence of Low-Emission Zones and Varying Road Grades. Energies 2019, 12, 4296. [Google Scholar] [CrossRef] [Green Version]
- Škugor, B.; Soldo, J.; Deur, J. Analysis of Optimal Battery State-of-Charge Trajectory for Blended Regime of Plug-in Hybrid Electric Vehicle. World Electr. Veh. J. 2019, 10, 75. [Google Scholar] [CrossRef] [Green Version]
- Besselink, I.; Oorschot, P.F.; Meinders, E.; Nijmeijer, H. Design of an efficient, low weight battery electric vehicle based on a VW Lupo 3L. In Proceedings of the 25th World Battery, Hybrid and Fuel Cell Electric Vehicle Symposium & Exhibition, Shenzhen, China, 5–9 November 2010; pp. 32–41. [Google Scholar]
- Al-Alawi, B.M.; Bradley, T.H. Total cost of ownership, payback, and consumer preference modeling of plug in HEVs. Appl. Energy 2013, 103, 488–506. [Google Scholar] [CrossRef]
- Inflation Calculator. Available online: https://fxtop.com/en/inflation-calculator.php (accessed on 14 May 2020).
- Aber, J. Electric Bus Analysis for NYC Transit; Columbia University: New York, NY, USA, 2016. [Google Scholar]
- Potkany, M.; Hlatka, M.; Debnar, M.; Hanzl, J. Comparison of the Lifecycle Cost Structure of Electric and Diesel Buses. Int. J. Marit. Sci. Technol. 2018, 65, 270–275. [Google Scholar] [CrossRef]
- Logtenberg, R.; Pawley, J.; Saxifrage, B. Comparing Fuel and Maintenance Costs of Electric and Gas Powered Vehicles in Canada; 2° Institute: Sechelt, BC, Canada, 2018. [Google Scholar]
- Elin, K. Charging Infrastructure for Electric City Buses. Master’s Thesis, KTH Royal Institute of Technology in Stockholm, Stockholm, Sweden, June 2016. [Google Scholar]
- Statista. Available online: https://www.statista.com/statistics/883118/global-lithium-ion-battery-pack-costs (accessed on 14 May 2020).
- Ranta, M.; Anttila, J.; Pihlatie, M.; Hentunen, A. Optimization of opportunity charged bus operation—A case study. In Proceedings of the 32nd International Electric Vehicle Symposium & Exhibition (EVS32), Lyon, France, 19–22 May 2019. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measured Data | Resolution |
|---|---|
| GPS coordinates (latitude, longitude), (°) | 1.0 × 10−7 |
| Elevation height (altitude), (m) | 0.1 |
| Vehicle speed, (km/h) | 0.1 |
| Travelled distance (from odometer), (km) | 1.0 |
| Accelerator pedal position, (%) | 1.0 |
| Cumulative fuel consumption, (L) | 0.5 |
| Fuel level in reservoir, (%) | 1.0 |
| Engine speed, (rpm) | 1.0 |
| Engine load, (%) | 1.0 |
| Parameter | CONV | HEV | PHEV | BEV |
|---|---|---|---|---|
| Model label | Volvo 7900 (Diesel) | Volvo 7900 Hybrid | Volvo 7900 Electric Hybrid | Volvo 7900 Electric |
| Maximum ICE power | 228 kW | 161 kW | 173 kW | N/A |
| Maximum e-motor power | N/A | 120 kW | 150 kW | 160 kW |
| Battery capacity | N/A | 4.8 kWh | 19 kWh | 76 kWh |
| Transmission model (type) | ZF 6AP 400B (AT) | Volvo AT2412 I-Shift (AMT) | Volvo 2-speed (AMT) | |
| Number of gears | 6 | 12 | 2 | |
| Maximum fast charging power | N/A | N/A | 150 kW | 300 kW |
| CONV | HEV | PHEV | BEV | |||||
|---|---|---|---|---|---|---|---|---|
| Rec * | Sim | Est ** | Sim | Rec * | Sim | Rec * | Sim | |
| Fuel consumption, (L/100 km) | 42.9 | 43.5 | 24.8 | 21.6 | 10.2 | 13.3 | N/A | |
| Electricity consumption, (kWh/100 km) | N/A | N/A | 53 | 42.4 | 83 | 77.9 | ||
| Case | Battery Capacity | Charging Power (Number of Charging Stations) | Percentage of Total Electricity Consumed by Reserve Buses | Number of Reserve Buses Required | Number of Bus Swaps Required (Number of Days when Swapping Occurs Out of 152) |
|---|---|---|---|---|---|
| BEV 1 | 76 kWh | 300 kW (6) | 9.2% | 2 | 558 (106) |
| BEV 2 | 76 kWh | 300 kW (7) | 1.8% | 2 | 94 (54) |
| BEV 3 | 76 kWh | 300 kW (8) | 1.7% | 2 | 90 (52) |
| BEV 4 | 150 kWh | 150 kW (8) | 0.6% | 2 | 4 (3) |
| BEV 5 | 250 kWh | 150 kW (7) | 0.00% | 0 | 0 (0) |
| Fleet Type (Total of 10 Buses) | ||||
|---|---|---|---|---|
| CONV | HEV | PHEV | BEV | |
| Fuel Consumption, L | 145,295 (* Ref) | 73,625 (−49.3%) | 45,120 (−68.9%) | N/A |
| Electricity Consumption, kWh | N/A | N/A | 145,054 (−45.9%) | 268,035 (* Ref) |
| Purchase Cost 1 of Single Bus (Off-Board Charger) | |||
| Conventional (CONV) | 240,000 EUR | ||
| Hybrid Electric (HEV) | 400,000 EUR | ||
| Plug-In Hybrid Electric (PHEV) | 420,000 EUR | ||
| Battery Electric (BEV) | 495,000 EUR | ||
| Infrastructural Cost 2 | |||
| Fast charging station (150 kW; PHEV case) | 45,000 EUR (TS) + 80,000 EUR (CS) = 125,000 EUR | ||
| Fast charging station (300 kW; BEV case) | 45,000 EUR (TS) + 120,000 EUR (CS) = 165,000 EUR | ||
| Battery Replacement Cost 3 | |||
| Hybrid Electric (HEV), 4.8 kWh | 15,000 EUR | ||
| Plug-In Hybrid Electric (PHEV), 19 kWh | 25,000 EUR | ||
| Battery Electric (BEV), 76 kWh | 80,000 EUR | ||
| Other Parameters | |||
| Bus service life | 12 years | ||
| Loan period (buses + charging stations) | 7 years | ||
| Battery lifetime | 6 years | ||
| Fuel price (mean) | 1.0243 EUR/L | ||
| Electricity prices (mean)4 | High tariff (HT): 0.1215 EUR/kWhLow tariff (LT): 0.1084 EUR/kWh | ||
| Inflation / Discount / Loan rates | 3% | 7% | 5% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Topić, J.; Soldo, J.; Maletić, F.; Škugor, B.; Deur, J. Virtual Simulation of Electric Bus Fleets for City Bus Transport Electrification Planning. Energies 2020, 13, 3410. https://doi.org/10.3390/en13133410
Topić J, Soldo J, Maletić F, Škugor B, Deur J. Virtual Simulation of Electric Bus Fleets for City Bus Transport Electrification Planning. Energies. 2020; 13(13):3410. https://doi.org/10.3390/en13133410
Chicago/Turabian StyleTopić, Jakov, Jure Soldo, Filip Maletić, Branimir Škugor, and Joško Deur. 2020. "Virtual Simulation of Electric Bus Fleets for City Bus Transport Electrification Planning" Energies 13, no. 13: 3410. https://doi.org/10.3390/en13133410