Dimensioning Methodology of Energy Storage Systems for Power Smoothing in a Wave Energy Conversion Plant Considering Efficiency Maps and Filtering Control Techniques

 ,
,
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Wave Energy Conversion (WEC) Power Plant
3. FESS Technology Description
- Connecting the FESS to a generic electrical system is performed through a 950V DC link. The scheme of the connection and the main FESS parts is shown in Figure 2a.
- The power and energy rating characteristics of the FESS are 125 kW and 0.5 kWh, respectively. The maximum power is related to SoC, i.e., the power at each point depends on the speed of the system as illustrated in Figure 2b.
- In an FESS, the common practice is to set the usable stored energy as 50% of the maximum energy, which fixes the minimum speed value, according to Equation (2). This is related to the efficiency of the energy transformation at low angular speeds [23].
- : FESS state of charge for each speed;
- : energy stored in the FESS module;
- : maximum energy stored in the FESS module;
- : speed of the flywheel;
- : maximum speed of the flywheel;
- : minimum speed of the flywheel; and
- : total inertia of the system (flywheel and switched reluctance machine rotor).
- A metallic rotor, instead of carbon fibre, is used in order to reduce the cost while maintaining the performance level required.
- The electrical machine topology is a 6/4 SRM used in a magnetic saturated state to maximise its performance. The reasons for using this technology are its robustness, simplicity, low free-wheeling losses, and reliability [28,29,30,31,32,33]. A representation is depicted in Figure 3b. The coils’ manufacture uses Litz wire due to its improvement of the performance of AC currents compared with conventional materials (copper bars). Likewise, other types of materials for the coils and electrical steel could be used using the same methodology.
4. Loss Model and Efficiency Map
4.1. Electrical Machine Losses: Copper and Iron Losses
4.2. Mechanical Losses: Bearings and Windage Losses
4.3. Power Converter Losses
4.4. FESS Loss and Efficiency Map
- : FESS total losses as a function of the speed and torque operation;
- : FESS power converter losses;
- : iron losses in the SRM of the FESS;
- : copper losses in the coils of the SRM;
- : vacuum pump consumption of the pressure system;
- : aerodynamical losses in the rotating parts of the FESS;
- : bearing friction losses as a function of the speed and torque operation;
- : mechanical power in the flywheel;
- : FESS efficiency as a function of the speed and torque; and
- : mechanical torque in the flywheel.
5. Case Study: Simulation Model, Control Algorithm and Flowchart of the Dimensioning Process
5.1. Simulation Model
5.2. ESS Plant Control
- : power value needed to cover the reference value supplied by the control system.
- Moving average filter (MAF).
- Moving average filter (MAF) considering future (predicted) values.
- : reference value for the smoothed power after MAF application. Considering an ideal ESS, this value represents the power injected into the grid.
- : window length—this parameter represents the number of samples used for the MAF.
- : power generated by the WEC plant.
- : time step used for each value of the time series. In this case, the power series considered is the WEC-generated power.
5.3. Dimensioning Process Flowchart
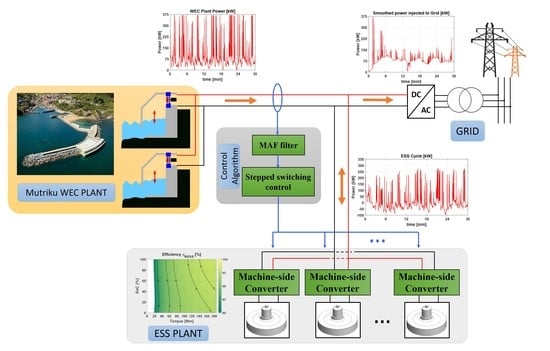
- The power generation time profile of the WEC plant () was used as input for a model which defined the energy storage requirements to achieve a certain requirement of power smoothing in the grid. Efficiency maps of the energy storage technology as well as the control filter based on the MAF were included in this model.
- Using a time profile based on ESS power, the energy and power rating values were calculated for the system ( and ).
- Once the analysis had been done for different control filters, the optimisation process for the MAF parameter was carried out. The first step was to set the value of the window length (number of MAF samples, nMAF). The constraints on this selection are:
- Minimum number of samples.
- Maximum reduction of the power oscillation.
- Due to the independence between the two filter parameters (nMAF and nP), the number of future samples was selected with the objective of minimising the ESS energy required ().
- Setting the minimum number of FESS modules (nESS) needed to cover a certain number of cases (85% of cases).
6. Application of the ESS Dimensioning and Control Algorithms to the Case Study
- The correlation value (nMAF vs. ) is close to 1. This means that the value of the standard deviation of the injected power is related to window length. As the correlation value is negative for the entire range of predicted samples, the greater the filter window length, the smaller the standard deviation, and the lower the oscillations in the power injected into the grid.
- The correlation between the number of predicted samples and the standard deviation (nP vs. ) is very low, almost negligible, for the whole window length range considered in the study. Therefore, the number of samples predicted could be selected independently of the standard deviation for any window length considered.
- The higher the window length or number of MAF samples, the lower the mean value of the standard deviation of the power injected into the grid.
- Both graphs show the benefits of a higher number of samples, but beyond a window length of 500 samples, the improvement in the reduction of power oscillations is not significant. Therefore, the optimal value for the MAF window length is defined as 500 samples.
- : the energy ratio required by the ESS to cover 85% of the cases. This value takes into account the energy reduction of the ESS using a predictive filter versus the MAF filter without prediction.
- : the energy required by the ESS to cover 85% of the cases for a specific MAF filter, considering a window length with a number of samples “j” and a value “k” of samples predicted.
- : the energy required by the ESS to cover 85% of the cases for a specific MAF filter without prediction, considering a window length with a number of samples “j”.
- The first FESS module was activated up to 80% of the time, while the second was only used 20%. This effect is due to the stepped switching control algorithm used. In order to maintain a similar level of ageing among the different FESS modules, a rotating shift should be established, updating the storage module which provides the energy each time.
- As Figure 15 also shows, the usage time for the fourth and the fifth FESS modules was negligible, which means that the benefits of using more than three FESSs for the dimensioning process are not sufficient, since their operation time is negligible and their cost should be taken into account.
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- ENTSO-E. European Network of Transmission System Operators for Electricity (ENTSO-E); ENTSO-E: Brussels, Belgium, 2016. [Google Scholar]
- EMEC EMEC: European Marine Energy Centre. Available online: http://www.emec.org.uk/ (accessed on 19 March 2019).
- Blanco, M.; Navarro, G.; Lafoz, M.; Pérez, J.I. How harmful is the wave energy penetration in an electric grid? In Proceedings of the Twelfth European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017; Lewis, A., Ed.; University College Cork: Cork, Ireland, 2017; p. 942. [Google Scholar]
- Villalba, I.; Blanco, M.; Pérez-Díaz, J.I.; Fernández, D.; Díaz, F.; Lafoz, M. Wave farms grid code compliance in isolated small power systems. IET Renew. Power Gener. 2019, 13, 171–179. [Google Scholar] [CrossRef]
- Blavette, A.; O’Sullivan, D.L.; Alcorn, R.; Lewis, T.W.; Egan, M.G. Impact of a medium-size wave farm on grids of different strength levels. IEEE Trans. Power Syst. 2014, 29, 917–923. [Google Scholar] [CrossRef]
- Lafoz, M.; Blanco, M.; Ramirez, D. Grid connection for wave power farms. In Proceedings of the 2011 14th European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011; pp. 1–10. [Google Scholar]
- Lafoz, M.; Pasquotto, M.; Moreno-Torres, P.; Blanco, M. Reduction of power oscillations combining energy storage with prediction techniques. In Proceedings of the 12th European Wave and Tidal Energy Conference, Cork, Ireland, 27 August–1 September 2017; Lewis, A., Ed.; University College Cork: Cork, Ireland, 2017; p. 823. [Google Scholar]
- Moreno-Torres, P.; Lafoz, M.; Navarro, G.; Blanco, M.; García-Tabarés, L. Sistema para el acondicionamiento de la potencia eléctrica generada en un sistema de generación undimotriz. 2016, 1–32. Available online: https://www.patentes-y-marcas.com/fr/brevet/sistema-para-el-acondicionamiento-de-la-potencia-electrica-generada-en-un-sistema-de-generacion-undimotriz-p201530980 (accessed on 19 March 2019).
- International Electrotechnical Commission. Electrical Energy Storage—White Paper; International Electrotechnical Commission: Geneva, Switzerland, 2011; pp. 1–78. [Google Scholar]
- Grbovic, P.J. Ultra-Capacitors in Power Conversion Systems: Analysis, Modeling and Design in Theory and Practice; Wiley–IEEE: Chichester, UK, 2014. [Google Scholar]
- EASE; EERA. European Energy Storage Technology Development Roadmap; European Association for Storage of Energy: Brussels, Belgium, 2017. [Google Scholar]
- Zhao, C.; Yin, H.; Ma, C. Quantitative efficiency and temperature analysis of battery-ultracapacitor hybrid energy storage systems. IEEE Trans. Sustain. Energy 2016, 7, 1791–1802. [Google Scholar] [CrossRef]
- Gatta, F.M.; Geri, A.; Lauria, S.; Maccioni, M.; Palone, F. Battery energy storage efficiency calculation including auxiliary losses: Technology comparison and operating strategies. In Proceedings of the 2015 IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015. [Google Scholar]
- Patil, V.C.; Ro, P.I.; Kishore Ranganath, R. End-to-end efficiency of liquid piston based ocean compressed air energy storage. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016. [Google Scholar]
- Funaki, T. Evaluating energy storage efficiency by modeling the voltage and temperature dependency in EDLC electrical characteristics. IEEE Trans. Power Electron. 2010, 25, 1231–1239. [Google Scholar] [CrossRef]
- Torres, J.; Moreno-Torres, P.; Navarro, G.; Blanco, M.; Lafoz, M. Fast energy storage systems comparison in terms of energy efficiency for a specific application. IEEE Access 2018, 6, 40656–40672. [Google Scholar] [CrossRef]
- Torres, J.; Navarro, G.; Blanco, M.; González-de-Soto, M.; García-Tabares, L.; Lafoz, M. Efficiency Map to Evaluate the Performance of Kinetic Energy Storage Systems Used with Renewable Generation. In Proceedings of the 2018 20th European Conference on Power Electronics and Applications (EPE’18 ECCE Europe), Riga, Latvia, 17–21 September 2018; pp. 1–9. [Google Scholar]
- Spanish Government; REE. Spanish Grid Code: P.O. 1: Funcionamiento de los Sistemas Eléctricos Insulares y Extrapeninsulares; REE: Madrid, Spain, 2006. [Google Scholar]
- Yan, Z.; Zhang, X.-P. Master-slave wave farm systems based on energy filter with smoothed power output. Glob. Energy Interconnect. 2018, 1, 559–567. [Google Scholar]
- Saidi, R.; Olivier, J.C.; Machmoum, M.; Chauveau, E. Energy management strategy for hybrid power systems based on moving average filters and power forecasting. In Proceedings of the 2018 IEEE International Conference on Industrial Technology (ICIT), Lyon, France, 20–22 February 2018; Volume 2018, pp. 966–971. [Google Scholar]
- Beaudin, M.; Zareipour, H.; Schellenberg, A.; Rosehart, W. Energy Storage for Mitigating the Variability of Renewable Electricity Sources. Energy Storage Smart Grids Plan. Oper. Renew. Var. Energy Resour. 2014, 14, 1–33. [Google Scholar]
- EVE—Ente Vasco de la Energía EVE—Ente Vasco de la Energía. Available online: http://www.eve.eus/Proyectos-energeticos/Proyectos/Energia-Marina.aspx?lang=es-ES (accessed on 28 November 2017).
- Genta, G. Kinetic Energy Storage: Theory and Practice of Advanced Flywheel Systems; Butterworths: London, UK, 1985. [Google Scholar]
- Burnand, G.; Araujo, D.M.; Koechli, C.; Perriard, Y. Validation by measurements of a windage losses model for very-high-speed machines. In Proceedings of the 2017 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, NSW, Australia, 11–14 August 2017; pp. 1–4. [Google Scholar]
- Nachouane, A.B.; Abdelli, A.; Friedrich, G.; Vivier, S. Estimation of windage losses inside very narrow air gaps of high speed electrical machines without an internal ventilation using CFD methods. In Proceedings of the 2016 XXII International Conference on Electrical Machines (ICEM), 4–7 September 2016; pp. 2704–2710. [Google Scholar]
- Calverley, S.D.; Jewell, G.W.; Saunders, R.J. Aerodynamic losses in switched reluctance machines. IEE Proc. Electr. Power Appl. 2000, 147, 443. [Google Scholar] [CrossRef]
- Romanazzi, P.; Howey, D.A. Air-gap convection in a switched reluctance machine. In Proceedings of the 2015 Tenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 31 March–2 April 2015; pp. 1–7. [Google Scholar]
- Moreno-Torres, P.; Lafoz, M.; Blanco, M.; Navarro, G.; Torres, J.; García-Tabarés, L. Switched Reluctance Drives with Degraded Mode for Electric Vehicles. In Modeling and Simulation for Electric Vehicle Applications; InTech: London, UK, 2016. [Google Scholar]
- Jack, A.G.; Mecrow, B.C.; Haylock, J.A. A comparative study of permanent magnet and switched reluctance motors for high-performance fault-tolerant applications. IEEE Trans. Ind. Appl. 1996, 32, 889–895. [Google Scholar] [CrossRef]
- Zeraoulia, M.; Benbouzid, M.E.H.; Diallo, D. Electric Motor Drive Selection Issues for HEV Propulsion Systems: A Comparative Study. IEEE Trans. Veh. Technol. 2006, 55, 1756–1764. [Google Scholar] [CrossRef] [Green Version]
- Stephens, C.M. Fault Detection and Management System for Fault-Tolerant Switched Reluctance Motor Drives. IEEE Trans. Ind. Appl. 1991, 27, 1098–1102. [Google Scholar] [CrossRef]
- Mir, S.; Islam, M.S.; Sebastian, T.; Husain, I. Fault-Tolerant Switched Reluctance Motor Drive Using Adaptive Fuzzy Logic Controller. IEEE Trans. Power Electron. 2004, 19, 289–295. [Google Scholar] [CrossRef]
- Hennen, M.D.; Niessen, M.; Heyers, C.; Brauer, H.J.; De Doncker, R.W. Development and Control of an Integrated and Distributed Inverter for a Fault Tolerant Five-Phase Switched Reluctance Traction Drive. IEEE Trans. Power Electron. 2012, 27, 547–554. [Google Scholar] [CrossRef]
- Hong, G.; Wei, T.; Ding, X. Multi-Objective Optimal Design of Permanent Magnet Synchronous Motor for High Efficiency and High Dynamic Performance. Publ. IEEE Access 2018, 6, 23568–23581. [Google Scholar] [CrossRef]
- Imakawa, T.; Chimata, K.; Hoshi, N.; Chiba, A.; Takemoto, M.; Ogasawara, S. Characteristic measurements of switched reluctance motor on prototype electric vehicle. In Proceedings of the 2012 IEEE International Electric Vehicle Conference, Greenville, SC, USA, 4–8 March 2012. [Google Scholar]
- Guo, Q.; Zhang, C.; Li, L.; Wang, M.; Pei, L.; Wang, T.; Model, A.L. Maximum Efficiency Control of Permanent Magnet Synchronous Motor System with SiC MOSFETs for Flywheel Energy Storage. In Proceedings of the 2016 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016. [Google Scholar]
- Raulin, V.; Radun, A.; Husain, I. Modeling of Losses in Switched Reluctance Machines. IEEE Trans. Ind. Appl. 2004, 40, 1560–1569. [Google Scholar] [CrossRef]
- Rafajdus, P.; Hrabovcova, V.; Hudak, P. Investigation of losses and efficiency in switched reluctance motor. In Proceedings of the 2006 12th International Power Electronics and Motion Control Conference, Portoroz, Slovenia, 30 August-1 September 2007; pp. 296–301. [Google Scholar]
- The Mathworks Inc. MATLAB—MathWorks. Available online: http://www.mathworks.com/products/matlab/ (accessed on 21 October 2017).
- Pyrhönen, J.; Jokinen, T.; Hrabovcová, V. Design of Rotating Electrical Machines; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Carstensen, C. Eddy Currents in Windings of Switched Reluctance Machines; Aachen University: Aachen, Germany, 2007. [Google Scholar]
- Krings, A.; Soulard, J. Overview and Comparison of Iron Loss Models for Electrical Machines. J. Electr. Eng. 2010, 10, 162–169. [Google Scholar]
- SKF Bearing Friction, Power Loss and Starting Torque. Available online: http://www.skf.com/group/products/bearings-units-housings/principles/bearing-selection-process/operating-temperature-and-speed/friction-powerloss-startingtorque/index.html (accessed on 28 November 2017).
- Vacuum Pump/Integrated OEM Vacuum Pumps for Labs. Available online: https://www.vacuubrand.com/us/page509.html (accessed on 23 October 2017).
- Miller, T.J.E. Switched Reluctance Motors and Their Control; Hammond, P., Miller, T.J.E., Kenjo, T., Eds.; Oxford University Press: Oxford, UK, 1993; Volume 31. [Google Scholar]
- Krishnan, R. Switched Reluctance Motor Drives: Modeling, Simulation, Analysis, Design, and Applications; CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar]
- BiMEP BiMEP Mutriku. Available online: https://bimep.com/pages/mutriku (accessed on 19 March 2019).
- Committee, D.; Power, I.; Society, E. IEEE Std 519-2014 IEEE Recommended Practice and Requirements for Harmonic Control in Electric Power Systems; 2014; Volume 2014. Available online: https://standards.ieee.org/standard/519-2014.html (accessed on 19 March 2019).
- Bauer, B.N.; Chou, Y. Statistical Analysis: With Business and Economic Applications. J. Am. Stat. Assoc. 1971, 66, 427. [Google Scholar] [CrossRef]















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Torres, J.; Blanco, M.; Lafoz, M.; Navarro, G.; Nájera, J.; Santos-Herran, M. Dimensioning Methodology of Energy Storage Systems for Power Smoothing in a Wave Energy Conversion Plant Considering Efficiency Maps and Filtering Control Techniques. Energies 2020, 13, 3380. https://doi.org/10.3390/en13133380
Torres J, Blanco M, Lafoz M, Navarro G, Nájera J, Santos-Herran M. Dimensioning Methodology of Energy Storage Systems for Power Smoothing in a Wave Energy Conversion Plant Considering Efficiency Maps and Filtering Control Techniques. Energies. 2020; 13(13):3380. https://doi.org/10.3390/en13133380
Chicago/Turabian StyleTorres, Jorge, Marcos Blanco, Marcos Lafoz, Gustavo Navarro, Jorge Nájera, and Miguel Santos-Herran. 2020. "Dimensioning Methodology of Energy Storage Systems for Power Smoothing in a Wave Energy Conversion Plant Considering Efficiency Maps and Filtering Control Techniques" Energies 13, no. 13: 3380. https://doi.org/10.3390/en13133380