Fault Diagnosis of PMSG Stator Inter-Turn Fault Using Extended Kalman Filter and Unscented Kalman Filter




Abstract
:1. Introduction
2. The Faulty PMSG Model
2.1. PMSG Healthy State Model
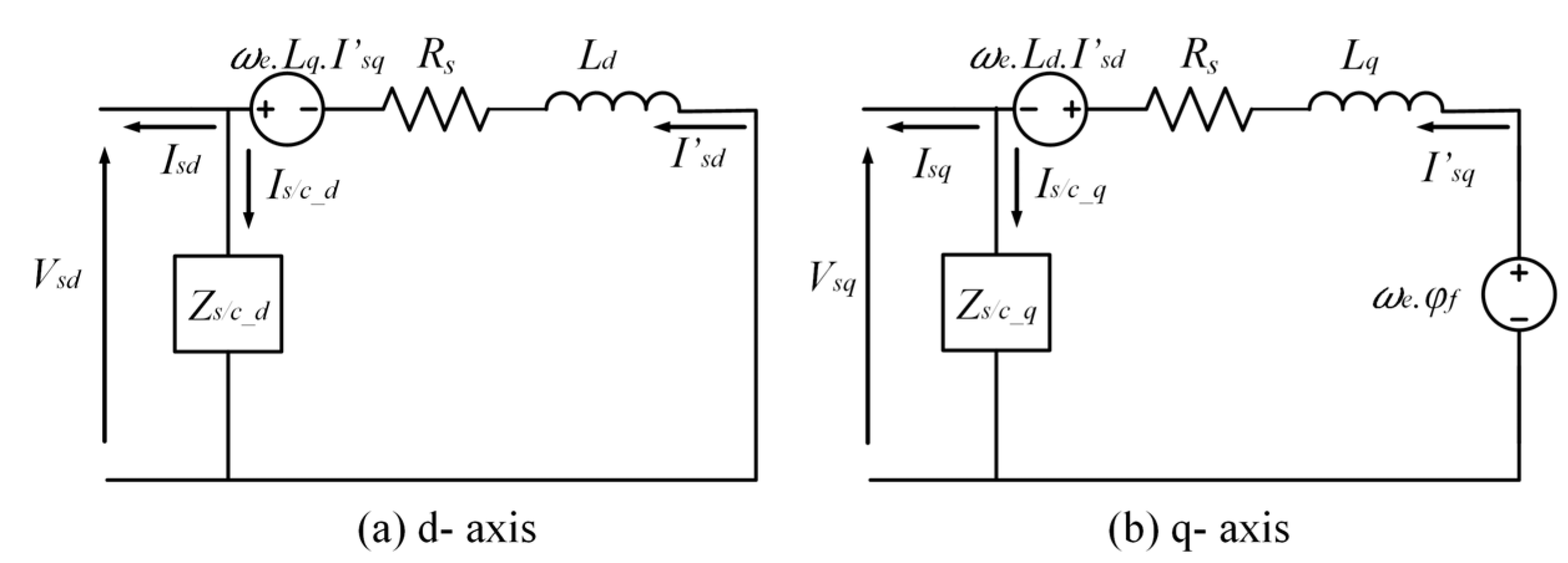
2.2. PMSG Faulty State Model
3. Parameter Estimation Procedures
3.1. General PMSG State-Space Model
3.2. Extended Kalman Filter Algorithm
3.3. Unscented Kalman Filter Algorithm
3.4. The Covariance Matrices Tuning
4. Simulation Results
4.1. EKF VS. UKF Response
4.2. Robustness Tests
4.3. Load Variation Test
4.4. Frequency Variation Test
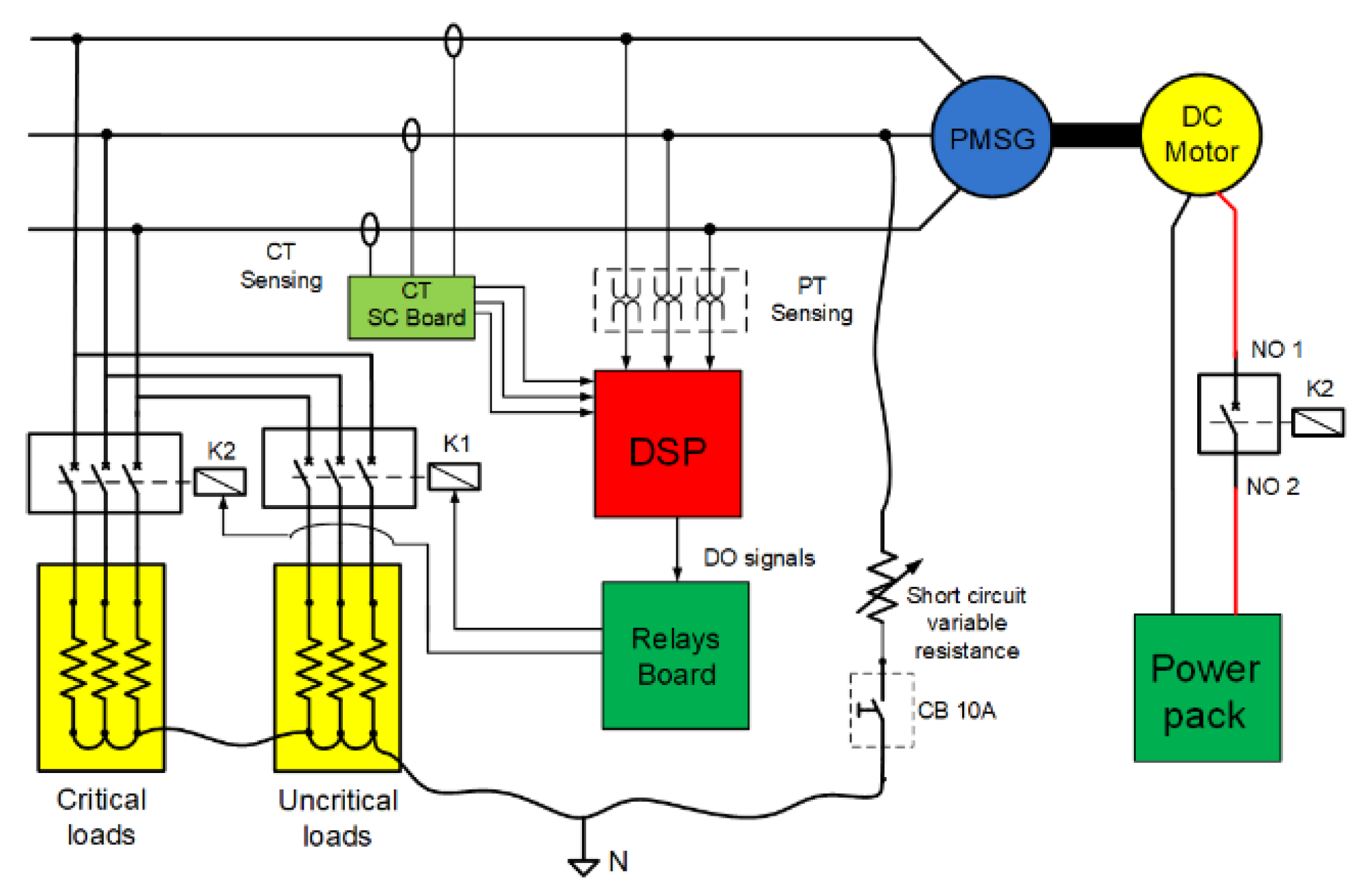
5. Experimental Results
5.1. Test Bench
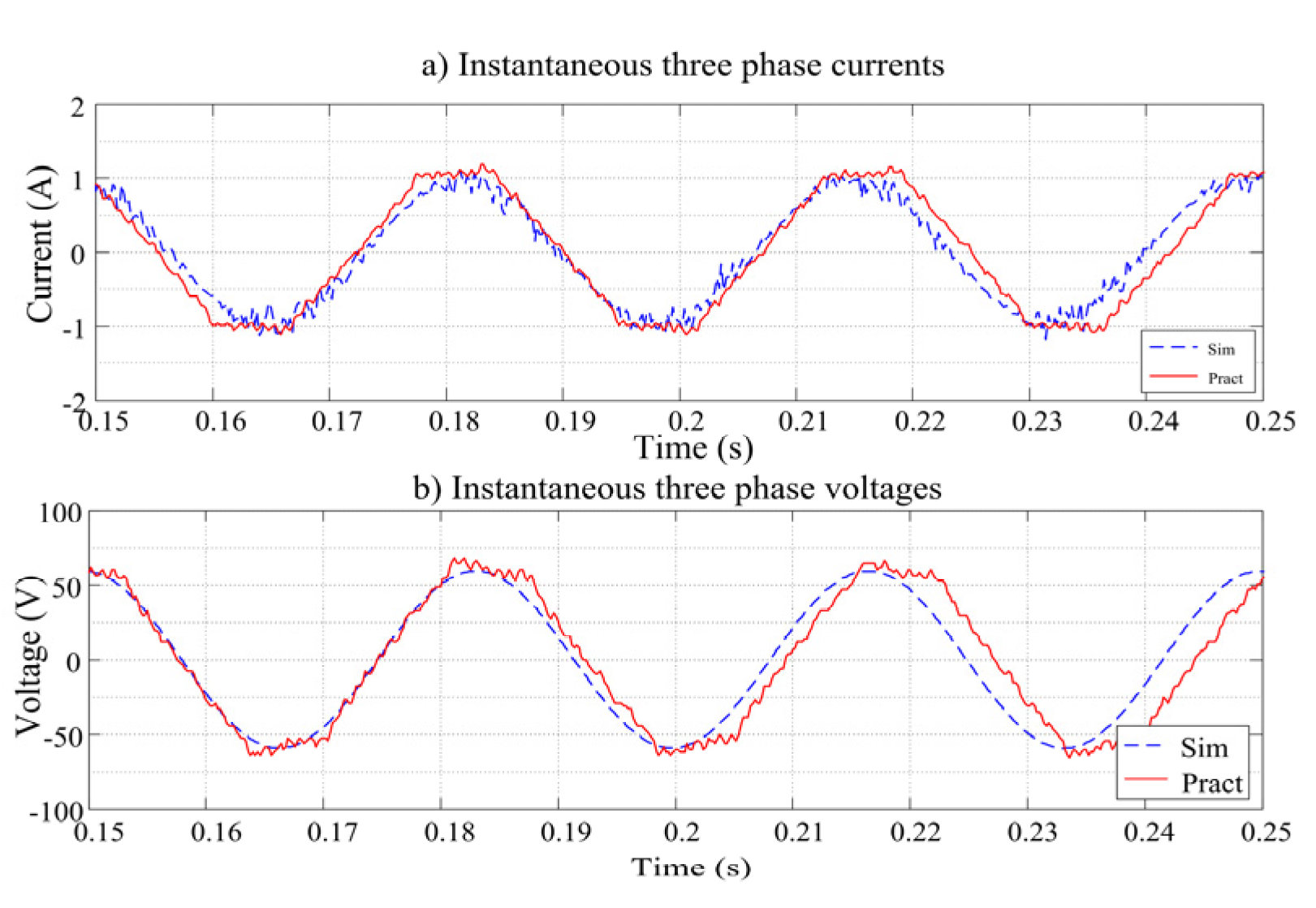
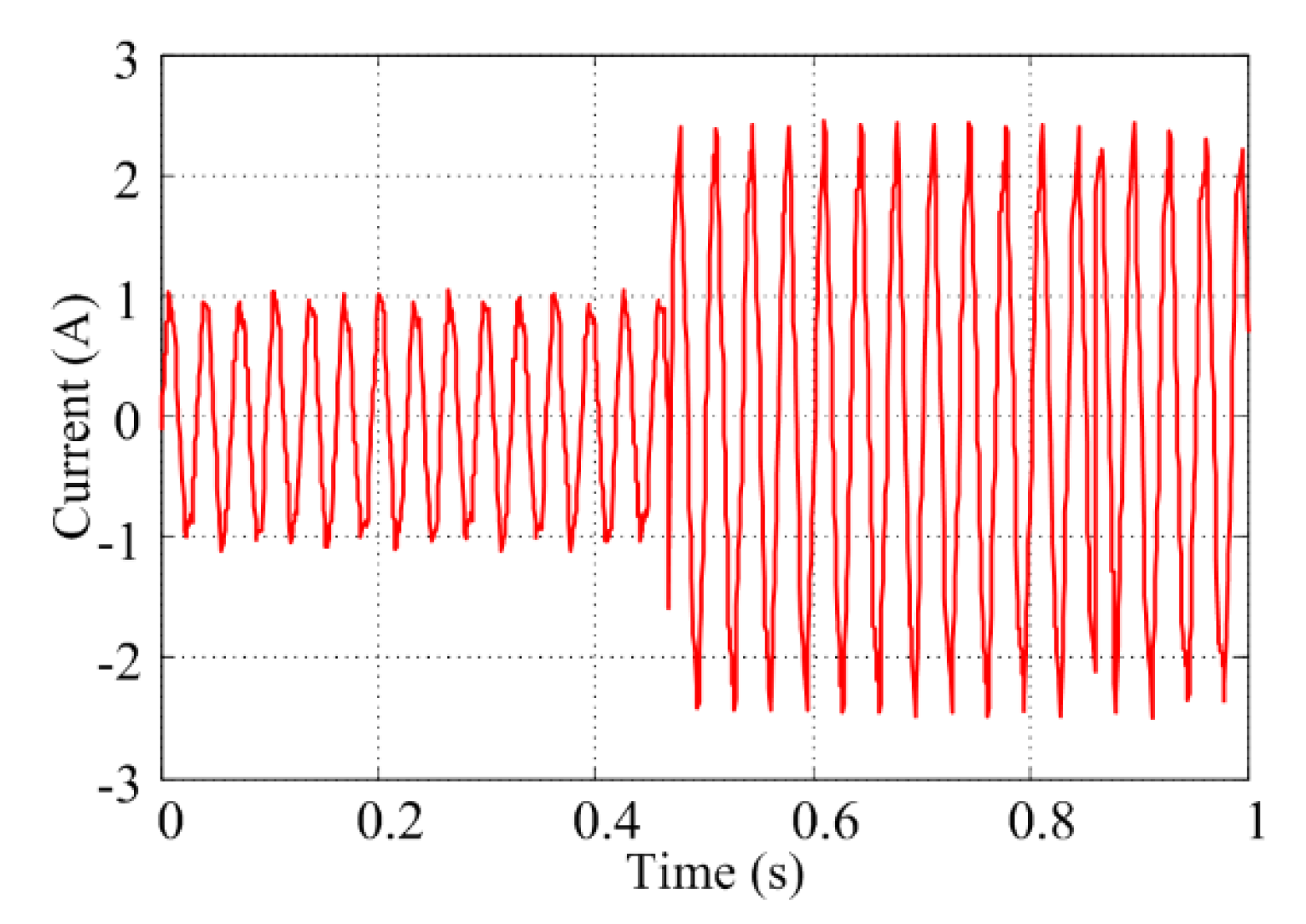
5.2. PMSG Test Output
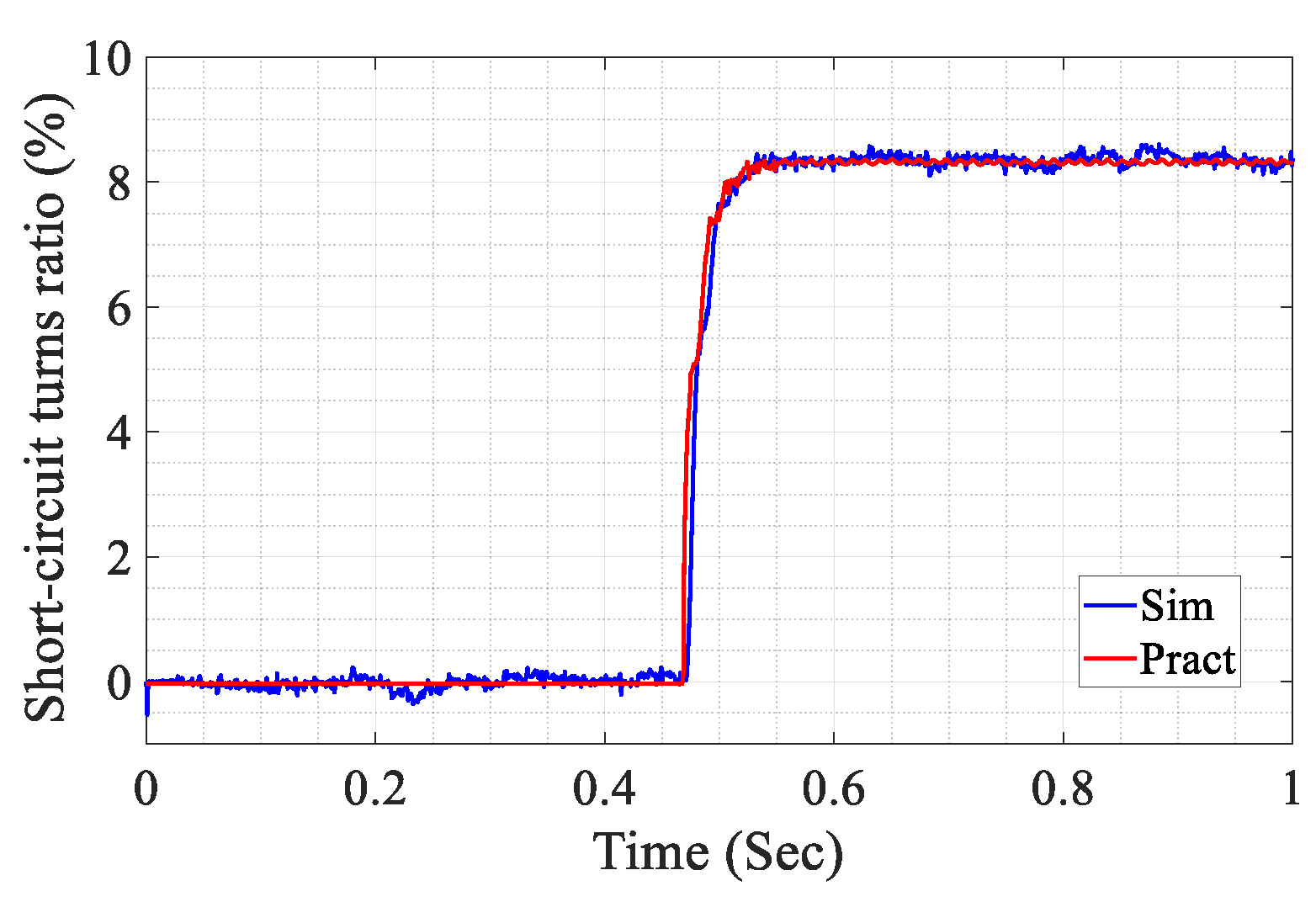
5.3. EKF Response
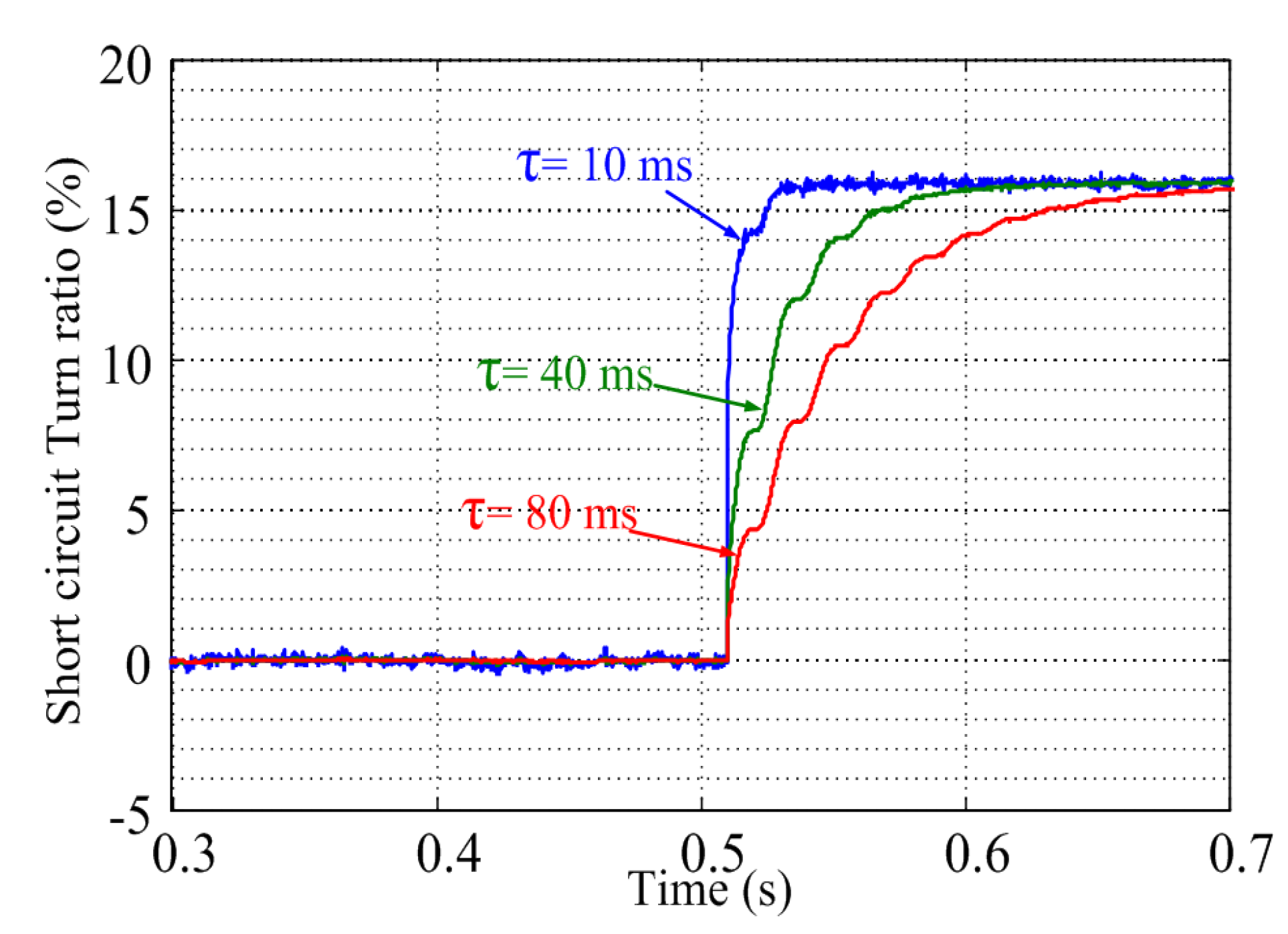
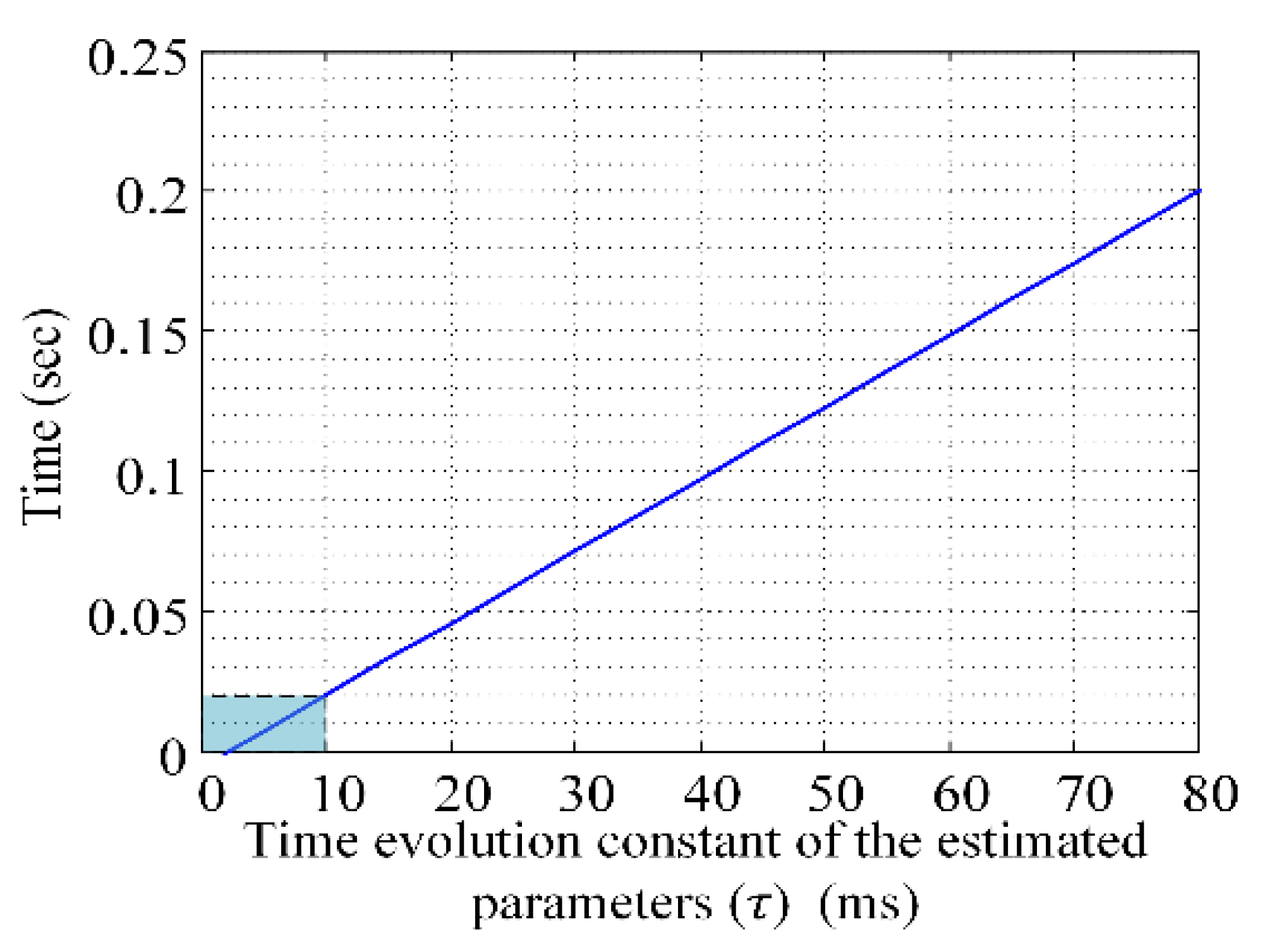
5.4. Tuning of Covariance Matrices
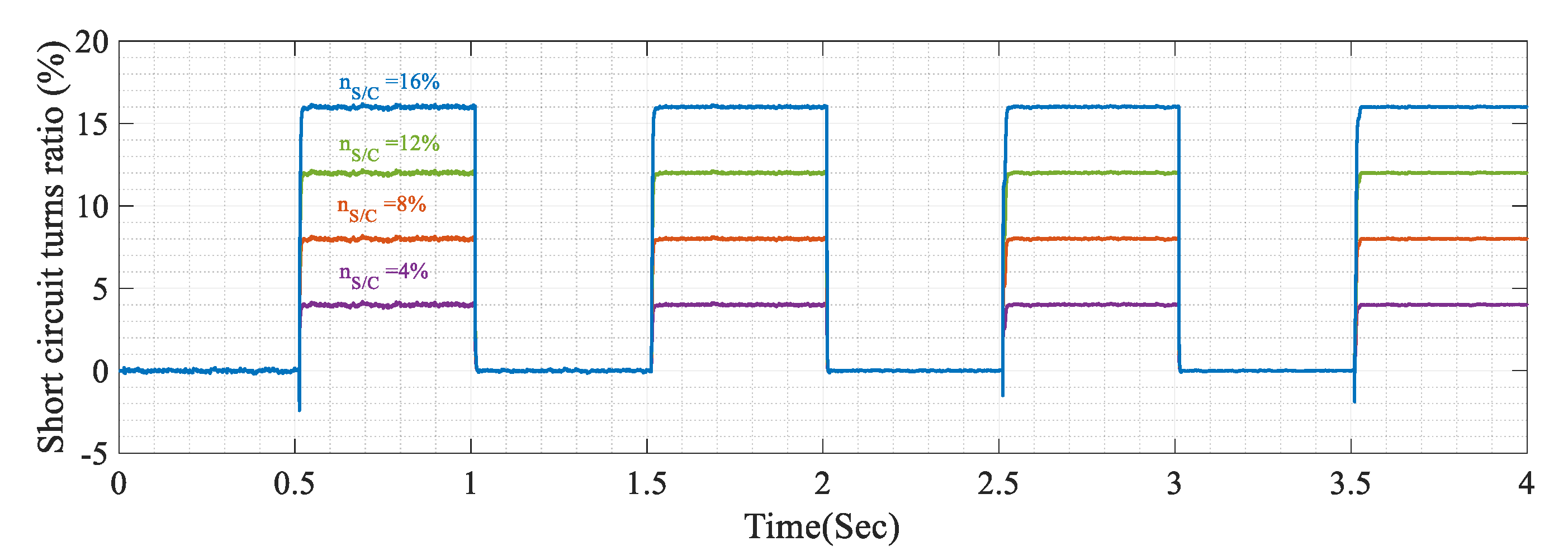
5.5. Robustness Test
5.6. Decision-Making Process
- the disconnection of the machine;
- load shedding.
5.6.1. Scenario 1: The Disconnection of the Machine
5.6.2. Scenario 2: Load Shedding
6. Conclusions
- a fast and accurate response in relation to the time needed to take action in real time;
- a robust estimation, in the presence of process and measurement noises, in addition to load and frequency variations.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Direct stator synchronous inductance. | mH | Output vector. | |||
| Quadrature stator synchronous inductance. | mH | Sampling period. | Sec | ||
| Direct and quadrature stator voltages. | Volts | Short-circuit current. | Ampere | ||
| dq transformation matrix. | Short-circuit resistance. | Ω | |||
| Electrical angular position. | rad | Short-circuited turns ratio. | % | ||
| Electrical angular velocity | rad/s | State equation of the discrete model. | |||
| [E] | Electromotive forces vector. | Volt | State matrix. | ||
| [] | Equivalent fault impedance. | Ω | State noises covariance matrix. | ||
| Extended state vector. | State noises vector. | ||||
| Extended state vector. | State vector. | ||||
| Fault localization angle. | Stator currents vector after variable change in dq-frame. | Ampere | |||
| Fault localization matrix. | Stator currents vector in dq-frame. | Ampere | |||
| Feed forward matrix. | Stator resistance. | Ω | |||
| J | Inertia | Kg.m2 | Stator synchronous inductance. | mH | |
| Input matrix. | P | The electromechanical power | Watts | ||
| Input vector. | - | The error covariance matrix at time k | |||
| Kalman gain | The output equations of the discrete linearized model. | ||||
| Load torque | Nm | The prior estimate of | |||
| Measurement noises covariance matrix | The state equations of the discrete linearized model. | ||||
| Measurement noises vector. | τ | The time constant of the estimated parameters. | Sec | ||
| Output equation of the discrete model. | The variance of input signals noises. | ||||
| Output matrix. | The variance of output signals noises. |
References
- Zhang, Y.; Ji, T.Y.; Li, M.S.; Wu, Q.H.; Wu, Q.H. Application of Discrete Wavelet Transform for Identification of Induction Motor Stator Inter-turn Short Circuit. In Proceedings of the 2015 IEEE Innovative Smart Grid Technologies—Asia, ISGT ASIA 2015, Bangkok, Thailand, 3–6 November 2016. no. 51207058. [Google Scholar]
- Wang, H.; Yang, J.; Chen, Z.; Ge, W.; Ma, Y.; Xing, Z.; Yang, L. Model Predictive Control of PMSG—Based Wind Turbines for Frequency Regulation in an Isolated Grid. IEEE Trans. Ind. Appl. 2018, 54, 3077–3089. [Google Scholar] [CrossRef]
- Fakhari, M.; Arani, M. Assessment and Enhancement of a Full-Scale PMSG-Based Wind Power Generator Performance Under Faults. IEEE Trans. Energy Convers. 2016, 31, 728–739. [Google Scholar]
- Jiang, Y.; Zhang, Z.; Jiang, W.; Geng, W.; Huang, J. Three-phase current injection method for mitigating turn-to-turn short-circuit fault in concentrated-winding permanent magnet aircraft starter generator. IET Electr. Power Appl. 2018, 12, 566–574. [Google Scholar] [CrossRef]
- Gao, F.; Zheng, X.; Bozhko, S.; Hill, C.I.; Asher, G. Modal Analysis of a PMSG-Based DC Electrical Power System in the More Electric Aircraft Using Eigenvalues Sensitivity. IEEE Trans. Transp. Electrif. 2015, 1, 65–76. [Google Scholar]
- Sarigiannidis, A.; Kladas, A. High Efficiency Shaft Generator Drive System Design for Ro-Ro Trailer-passenger Ship Application. In Proceedings of the 2015 International Conference on Electrical Systems for Aircraft, Railway, Aachen, Germany, 3–5 March 2015. Ship Propulsion and Road Vehicles (ESARS). [Google Scholar]
- Wang, Z.; Yang, J.; Ye, H.; Zhou, W. A Review of Permanent Magnet Synchronous Motor Fault Diagnosis. In Proceedings of the 2014 IEEE Conference and Expo. Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–5. [Google Scholar]
- Ebrahimi, B.M.; Roshtkhari, M.J.; Faiz, J.; Khatami, S.V. Advanced eccentricity fault recognition in permanent magnet synchronous motors using stator current signature analysis. IEEE Trans. Ind. Electron. 2014, 61, 2041–2052. [Google Scholar] [CrossRef]
- Rosero, J.; Romeral, L.; Rosero, E.; Urresty, J. Fault Detection in dynamic conditions by means of Discrete Wavelet Decomposition for PMSM running under Bearing Damage. In Proceedings of the 2009 Twenty-Fourth Annual IEEE Applied Power Electronics Conference and Exposition, Washington, DC, USA, 15–19 Febuary 2009; pp. 951–956. [Google Scholar]
- Ebrahimi, B.M.; Faiz, J.; Roshtkhari, M.J. Static-, dynamic-, and mixed-eccentricity fault diagnoses in permanent-magnet synchronous motors. IEEE Trans. Ind. Electron. 2009, 56, 4727–4739. [Google Scholar] [CrossRef]
- Pacas, M.; Villwock, S.; Dietrich, R. Bearing Damage Detection in Permanent Magnet Synchronous Machines. In Proceedings of the 2009 IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; pp. 1098–1103. [Google Scholar]
- Soualhi, A.; Jean-monnet, U.; Lyon, U. Early Detection of Bearing Faults by the Hilbert-Huang Transform. In Proceedings of the 2016 4th International Conference on Control. Engineering & Information Technology (CEIT-2016), Hammamet, Tunisia, 16–18 December 2016; pp. 16–18. [Google Scholar]
- Rosero, J.; Romeral, J.L.; Cusido, J.; Ortega, J.A.; Garcia, A. Fault Detection of Eccentricity and Bearing Damage in a PMSM by Means of Wavelet Transforms Decomposition of the Stator Current. In Proceedings of the 2008 Twenty-Third Annual IEEE Applied Power Electronics Conference and Exposition, Austin, TX, USA, 24–28 Febuary 2008; pp. 111–116. [Google Scholar]
- Huang, T.; Fu, S.; Feng, H.; Kuang, J. Bearing Fault Diagnosis Based on Shallow Multi-Scale Convolutional Neural Network with Attention. Energies 2019, 12, 3937. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Zhang, S.; Yin, Y. A Novel Improved ELM Algorithm for a Real. Math. Probl. Eng. 2014, 2014. [Google Scholar] [CrossRef]
- Vinson, G.; Combacau, M.; Prado, T.; Ribot, P. Permanent Magnets Synchronous Machines Faults Detection and Identification. In Proceedings of the IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, Montreal, QC, Canada, 25–28 October 2012; pp. 3925–3930. [Google Scholar]
- Espinosa, A.G.; Rosero, J.A.; Cusidó, J.; Romeral, L.; Ortega, J.A. Fault detection by means of Hilbert-Huang transform of the stator current in a PMSM with demagnetization. IEEE Trans. Energy Convers. 2010, 25, 312–318. [Google Scholar] [CrossRef] [Green Version]
- Ruiz, J.R.R.; Rosero, J.A.; Espinosa, A.G.; Romeral, L. Detection of demagnetization faults in permanent-Magnet synchronous motors under nonstationary conditions. IEEE Trans. Magn. 2009, 45, 2961–2969. [Google Scholar] [CrossRef]
- Obeid, N.H.; Boileau, T.; Nahid-Mobarakeh, B. Modeling and diagnostic of incipient interturn faults for a three-phase permanent magnet synchronous motor. IEEE Trans. Ind. Appl. 2016, 52, 4426–4434. [Google Scholar] [CrossRef]
- Aubert, B.; Regnier, J.; Caux, S.; Alejo, D. Kalman-Filter-Based Indicator for Online Interturn Short Circuits Detection in Permanent-Magnet Synchronous Generators. Ind. Electron. IEEE Trans. 2015, 62, 1921–1930. [Google Scholar] [CrossRef]
- Chen, Y.; Liang, S.; Li, W.; Liang, H.; Wang, C. Faults and Diagnosis Methods of Permanent Magnet Synchronous Motors: A Review. Appl. Sci. 2019, 9, 2116. [Google Scholar] [CrossRef] [Green Version]
- Liang, H.; Chen, Y.; Liang, S.; Wang, C. Fault Detection of Stator Inter-Turn Short-Circuit in PMSM on Stator Current and Vibration Signal. Appl. Sci. 2018, 8, 1677. [Google Scholar] [CrossRef] [Green Version]
- Kościelny, J.M.; Syfert, M.; Sztyber, A. Advanced Solutions in Diagnostics and Fault Tolerant Control; Springer: New York, NY, USA, 2017. [Google Scholar]
- Duque-Perez, O.; del Pozo-Gallego, C.; Morinigo-Sotelo, D.; Godoy, W.F. Condition monitoring of bearing faults using the stator current and shrinkage methods. Energies 2019, 12, 3392. [Google Scholar] [CrossRef] [Green Version]
- Helal, A.H.; Badran, E.F.; Ashour, H.A. Synchronous Generator Stator Earth fault Classification and Location Using Wavelet Transform and ANFIS. In Proceedings of the 2017 Nineteenth International Middle East. Power Systems Conference (MEPCON), Menoufia University, Cairo, Egypt, 19–21 December 2017; pp. 19–21. [Google Scholar]
- Devi, N.R. Diagnosis and Classification of Stator Winding Insulation Faults on a Three-phase Induction Motor using Wavelet and MNN. IEEE Trans. Dielectr. Electr. Insul. 2016, 23. [Google Scholar] [CrossRef]
- Rosero, J.A.; Romeral, L.; Ortega, J.A.; Rosero, E. Short-circuit detection by means of empirical mode decomposition and Wigner-Ville distribution for PMSM running under dynamic condition. IEEE Trans. Ind. Electron. 2009, 56, 4534–4547. [Google Scholar] [CrossRef]
- Cempel, C. Descriptive parameters and contradictions in TRIZ methodology for vibration condition monitoring of machines. Diagnostyka 2014, 15, 51–59. [Google Scholar]
- Cempel, C. Generalized singular value decomposition in multidimensional condition monitoring of machines-A proposal of comparative diagnostics. Mech. Syst. Signal. Process. 2009, 23, 701–711. [Google Scholar] [CrossRef]
- Patan, K.; Witczak, M.; Korbicz, J. Towards robustness in neural network based fault diagnosis. Int. J. Appl. Math. Comput. Sci. 2008, 18, 443–454. [Google Scholar] [CrossRef] [Green Version]
- Skowron, M.; Orlowska-Kowalska, T.; Wolkiewicz, M.; Kowalski, C.T. Convolutional neural network-based stator current data-driven incipient stator fault diagnosis of inverter-fed induction motor. Energies 2020, 13, 1475. [Google Scholar] [CrossRef] [Green Version]
- Medoued, A.; Lebaroud, A.; Laifa, A.; Sayad, D. Feature form Extraction and Optimization of Induction Machine Faults Using PSO Technique. In Proceedings of the 3rd International Conference on Electric Power and Energy Conversion Systems, Istanbul, Turkey, 2–4 October 2013; pp. 1–5. [Google Scholar]
- Quiroga, J.; Liu, L.; Cartes, D.A. Fuzzy Logic Based Fault Detection of PMSM Stator Winding Short under Load Fluctuation Using Negative Sequence Analysis. In Proceedings of the American Control, Seattle, WA, USA, 11–13 June 2008; pp. 4262–4267. [Google Scholar]
- Mini, V.P.; Sivakotaiah, S.; Ushakumari, S. Fault Detection and Diagnosis of an Induction Motor Using Fuzzy Logic. In Proceedings of the IEEE Region 8 SIBIRCON-2010, Irkutsk Listvyanka, Russia, 11–15 July 2010; pp. 459–464. [Google Scholar]
- Korbicz, J.; Kowal, M. Neuro-fuzzy networks and their application to fault detection of dynamical systems. Eng. Appl. Artif. Intell. 2007, 20, 609–617. [Google Scholar] [CrossRef]
- Pazera, M.; Korbicz, J. A Process Fault Estimation Strategy for Non-linear Dynamic Systems Marcin. In Proceedings of the International Conference on Recent Trends in Physics (ICRTP 2016), Lille, France, 17–18 November 2016; Volume 755. [Google Scholar]
- Pazera, M.; Witczak, M.; Korbicz, J. Combined Estimation of Actuator and Sensor Faults for Non-linear Dynamic Systems. In Proceedings of the 2017 22nd International Conference on Methods and Models in Automation and Robotics, Miedzyzdroje, Poland, 28–31 August 2017; pp. 933–938. [Google Scholar]
- Khov, M.; Regnier, J.; Faucher, J. Monitoring of Turn Short-circuit Faults in Stator of PMSM in Closed Loop by On-line Parameter Estimation. In Proceedings of the 2009 IEEE Int. Symp. Diagnostics Electr. Mach. Power Electron. Drives, Cargese, France, 31 August–3 September 2009. [Google Scholar]
- Wafik, W.; El-geliel, M.A.; Lotfy, A. PMSG Fault Diagnosis in Marine Application. In Proceedings of the 2016 20th International Conference on System Theory, Control. and Computing (ICSTCC), Sinaia, Romania, 13–15 October 2016; pp. 626–631. [Google Scholar]
- Saad, W.W.; El-geliel, M.A.; Lotfy, A. IM Stator Winding Faults Siagnosis Using EKF. In Proceedings of the 2017 fifth Advanced Control Circuits and Systems (ACCS’017), Alexandria, Egypt, 5–8 November 2017; pp. 34–39. [Google Scholar]
- Lončarek, T.; Lešić, V.; Vašak, M. Increasing Accuracy of Kalman Filter-based Sensorless Control of Wind Turbine PM Synchronous Generator. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 745–750. [Google Scholar]
- Zawirski, K.; Janiszewski, D.; Muszynski, R. Unscented and extended Kalman filters study for sensorless control of PM synchronous motors with load torque estimation. Bull. POLISH Acad. Sci. Tech. Sci. 2013, 61, 793–801. [Google Scholar] [CrossRef]
- Kościelny, J.M.; Syfert, M.; Tabor, Ł. Application of Knowledge AboutResidual Dynamics for Fault Isolation and Identification. In Proceedings of the Conference on Control. and Fault-Tolerant Systems, SysTol, Nice, France, 9–11 October 2013; pp. 275–280. [Google Scholar]
- Sztyber, A.; Ostasz, A.; Koscielny, J.M. Graph of a process—A new tool for finding model structures in a model-based diagnosis. IEEE Trans. Syst. Man, Cybern. Syst. 2015, 45, 1004–1017. [Google Scholar] [CrossRef]
- Wan, E.A.; van der Merwe, R. The Unscented Kalman Filter for Nonlinear Estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal. Processing, Communications, and Control. Symposium (Cat. No.00EX373), Lake Louise, AB, Canada, 4 October 2002; pp. 153–158. [Google Scholar]
- Electric, S. Extremely Inverse Time (EIT) Curves Current I / I s; Schneider Electric: Rueil-Malmaison, France, 2008; p. 3000. [Google Scholar]
- Witczak, P.; Luzar, M.; Witczak, M.; Korbicz, J. A Robust Fault-tolerant Model Predictive Control for Linear Parameter-varying Systems. In Proceedings of the 2014 19th International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 2–5 September 2014; pp. 462–467. [Google Scholar]



































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Nominal Power | P | 1500 W |
| Nominal current | 5 A | |
| Nominal Voltage | 100 v | |
| Nominal Frequency | f | 50 Hz |
| Stator resistance | 1.2 Ω | |
| Direct axis magnetizing inductance | 4 mH | |
| Quadrature axis magnetizing inductance | 3 mH | |
| Nominal Torque | 9.7 Nm | |
| Rotation speed | 1500 rpm | |
| Number of pole pairs | p | 2 |
| Total moment of system inertia | J | 0.11 kgm2 |
| Case | Freq (Hz) | Exact | Simulation | Practical |
|---|---|---|---|---|
| 1 | 20 | 2% | 2.15 | 1.94 |
| 2 | 20 | 4% | 4.3 | 3.62 |
| 3 | 20 | 8% | 8.3 | 7.52 |
| 4 | 20 | 10% | 10.3 | 9.77 |
| 5 | 20 | 12% | 12.22 | 12.1 |
| 6 | 20 | 16% | 15.9 | 16.5 |
| 7 | 30 | 2% | 2.15 | 1.97 |
| 8 | 30 | 4% | 4.3 | 3.8 |
| 9 | 30 | 8% | 8.3 | 7.85 |
| 10 | 30 | 10% | 10.3 | 9.81 |
| 11 | 30 | 12% | 12.22 | 11.8 |
| 12 | 30 | 16% | 15.9 | 16.1 |
| 13 | 40 | 2% | 2.2 | 1.97 |
| 14 | 40 | 4% | 4.3 | 3.7 |
| 15 | 40 | 8% | 8.5 | 7.53 |
| 16 | 40 | 10% | 10.2 | 9.9 |
| 17 | 40 | 12% | 12.3 | 12.3 |
| 18 | 50 | 2% | 2.2 | 2.1 |
| 19 | 50 | 4% | 4.1 | 4.1 |
| 20 | 50 | 8% | 8.4 | 7.94 |
| 21 | 50 | 10% | 10.2 | 10 |
| 22 | 50 | 12% | 12.2 | 11.8 |
| Case | Load Current (A) | Exact | Simulation | Practical |
|---|---|---|---|---|
| 1 | 0.72 | 2% | 2.15 | 1.97 |
| 2 | 0.72 | 4% | 4.3 | 3.8 |
| 3 | 0.72 | 8% | 8.3 | 7.85 |
| 4 | 0.72 | 10% | 10.3 | 9.81 |
| 5 | 0.72 | 12% | 12.22 | 11.8 |
| 6 | 0.72 | 16% | 15.9 | 16.1 |
| 7 | 1.5 | 2% | 2.15 | 2 |
| 8 | 1.5 | 4% | 4.3 | 3.9 |
| 9 | 1.5 | 8% | 8.3 | 8.2 |
| 10 | 1.5 | 10% | 10.3 | 9.9 |
| 11 | 1.5 | 12% | 12.22 | 12.1 |
| 12 | 2.25 | 2% | 2.2 | 1.97 |
| 13 | 2.25 | 4% | 4.3 | 3.85 |
| 14 | 2.25 | 8% | 8.5 | 7.9 |
| 15 | 2.25 | 10% | 10.2 | 9.5 |
| 16 | 2.25 | 12% | 12.3 | 12 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
El Sayed, W.; Abd El Geliel, M.; Lotfy, A. Fault Diagnosis of PMSG Stator Inter-Turn Fault Using Extended Kalman Filter and Unscented Kalman Filter. Energies 2020, 13, 2972. https://doi.org/10.3390/en13112972
El Sayed W, Abd El Geliel M, Lotfy A. Fault Diagnosis of PMSG Stator Inter-Turn Fault Using Extended Kalman Filter and Unscented Kalman Filter. Energies. 2020; 13(11):2972. https://doi.org/10.3390/en13112972
Chicago/Turabian StyleEl Sayed, Waseem, Mostafa Abd El Geliel, and Ahmed Lotfy. 2020. "Fault Diagnosis of PMSG Stator Inter-Turn Fault Using Extended Kalman Filter and Unscented Kalman Filter" Energies 13, no. 11: 2972. https://doi.org/10.3390/en13112972