Improvements on a Sensorless Scheme for a Surface-Mounted Permanent Magnet Synchronous Motor Using Very Low Voltage Injection

 , , and
, , and
Abstract
:
1. Introduction
2. Problem Description
- The amplitude of this signal is directly proportional to the error committed during the estimation, as well as the difference between the direct and quadrature inductances. This means that, for the case of a SMPMSM, this difference will be very small and so will be the signal recovered.
- The signal is also directly proportional to the voltage injected but inversely proportional to the injection frequency. The amplitude of the voltage should be low and the frequency high enough, so there is no detriment in the main control algorithm of the system. However, for a good resolution of the recovered signal, the injection frequency should not be higher than , being the sampling frequency.
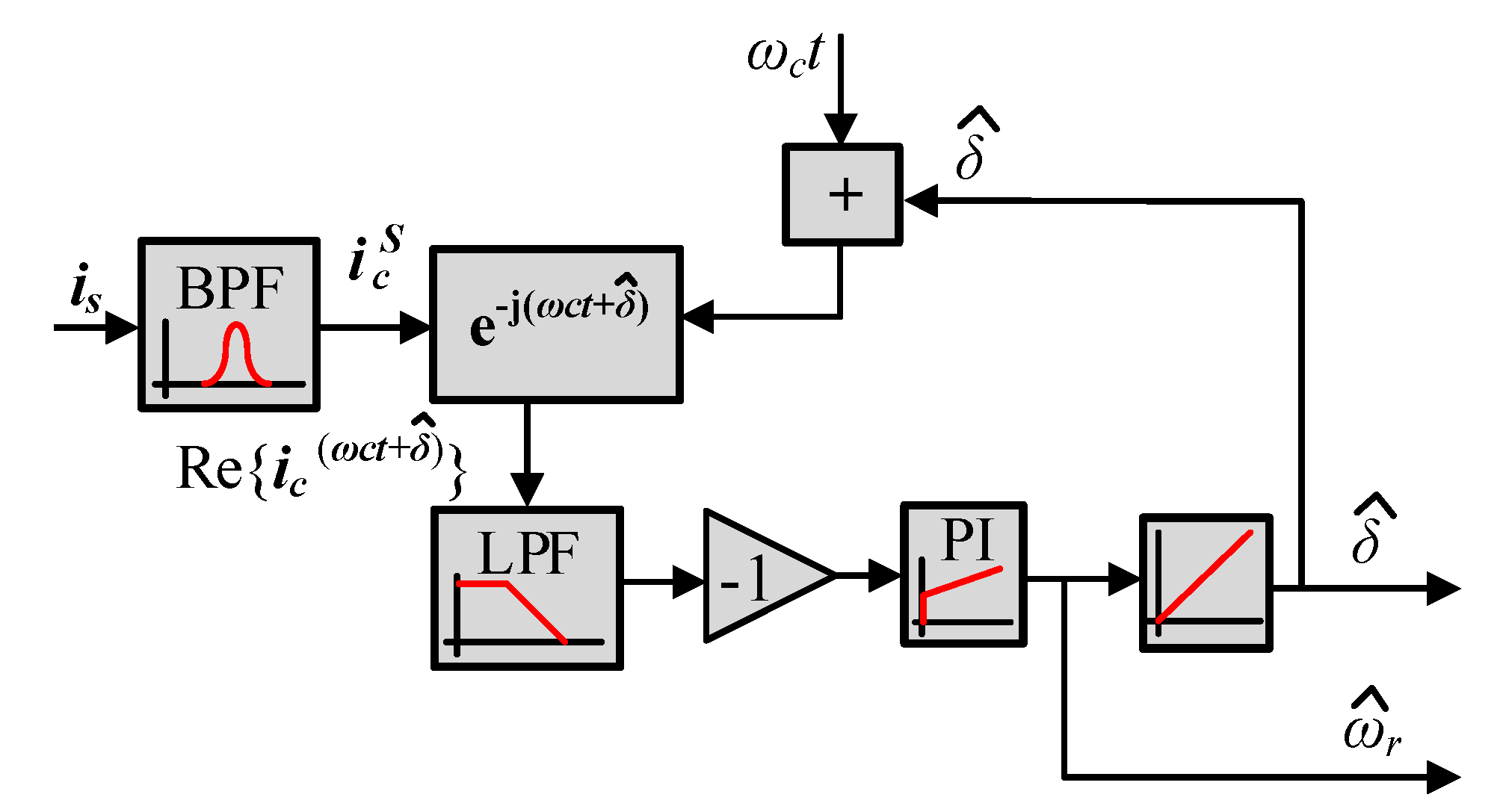
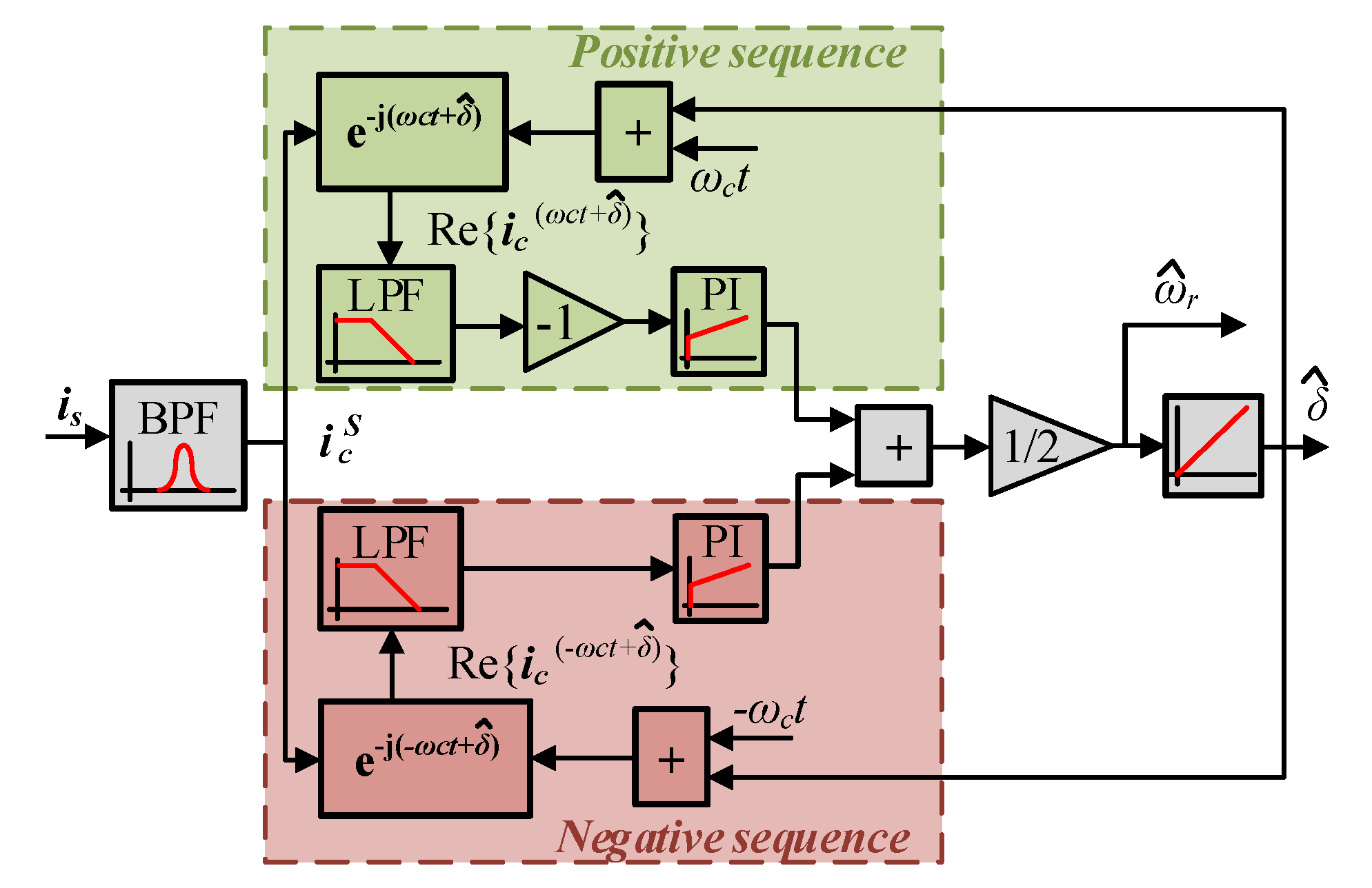
3. Enhanced Demodulation
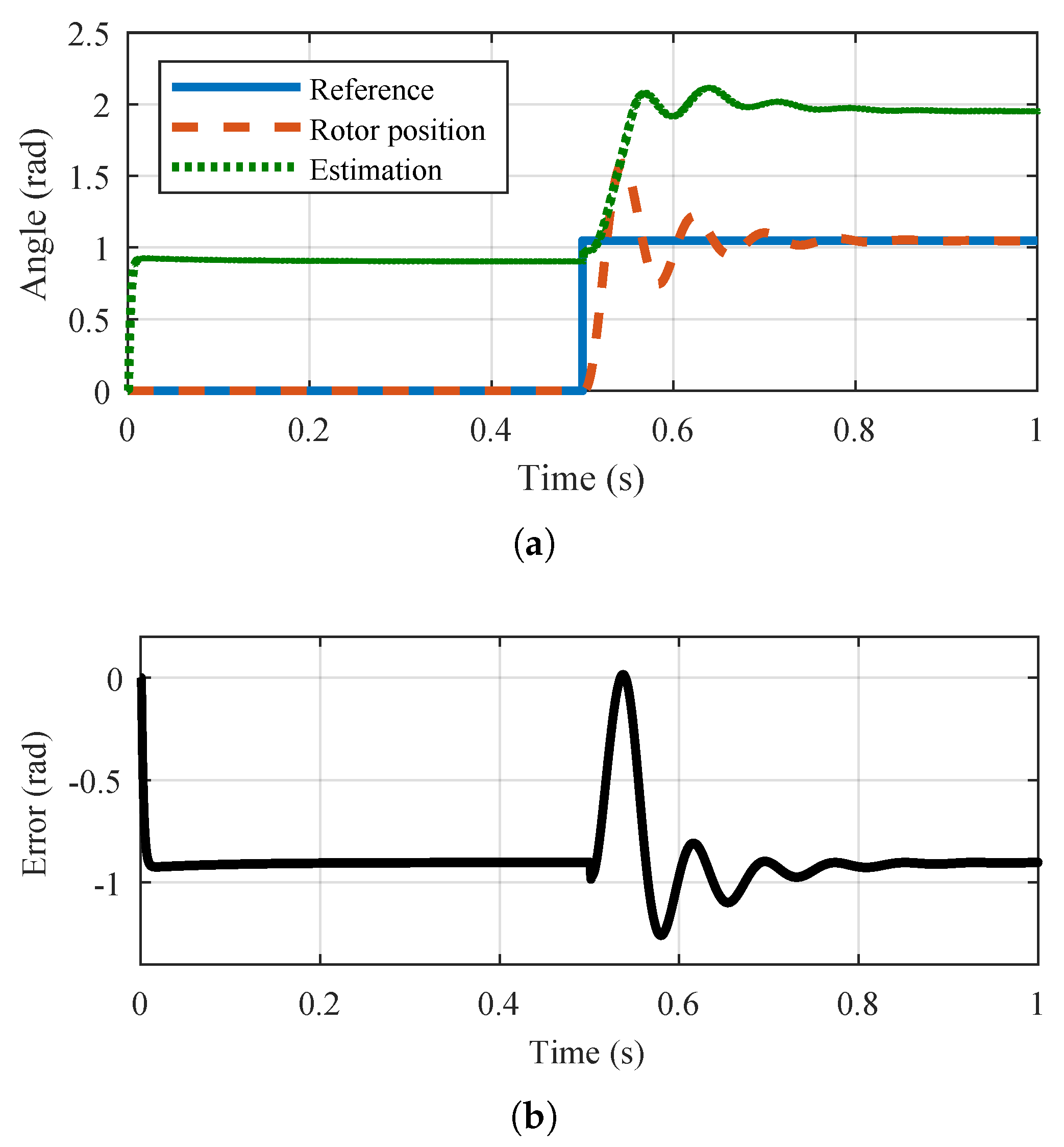
4. Simulation Results
5. Signal Processing
5.1. Filtering
5.2. Lag Compensation
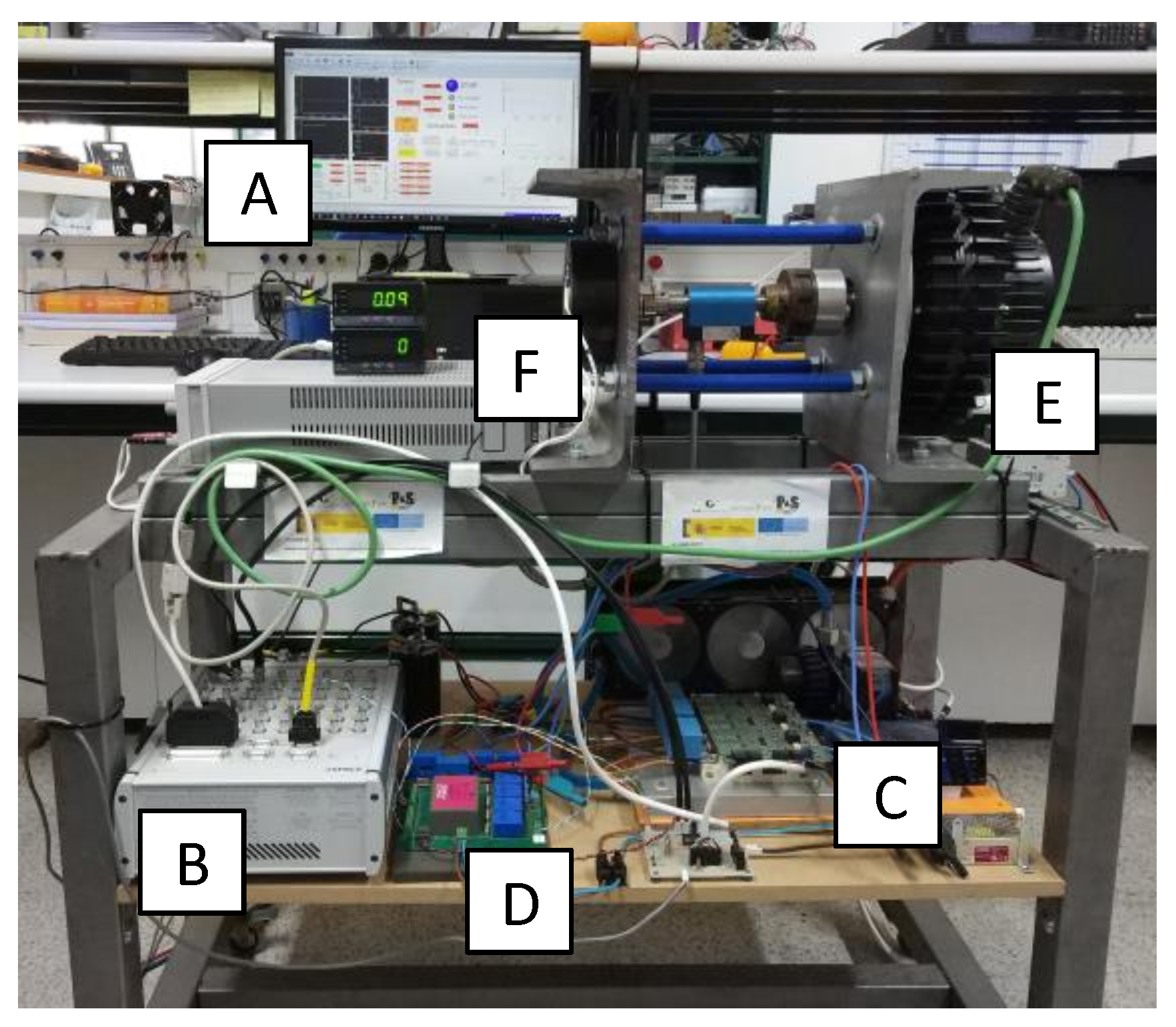
6. Experimental Results
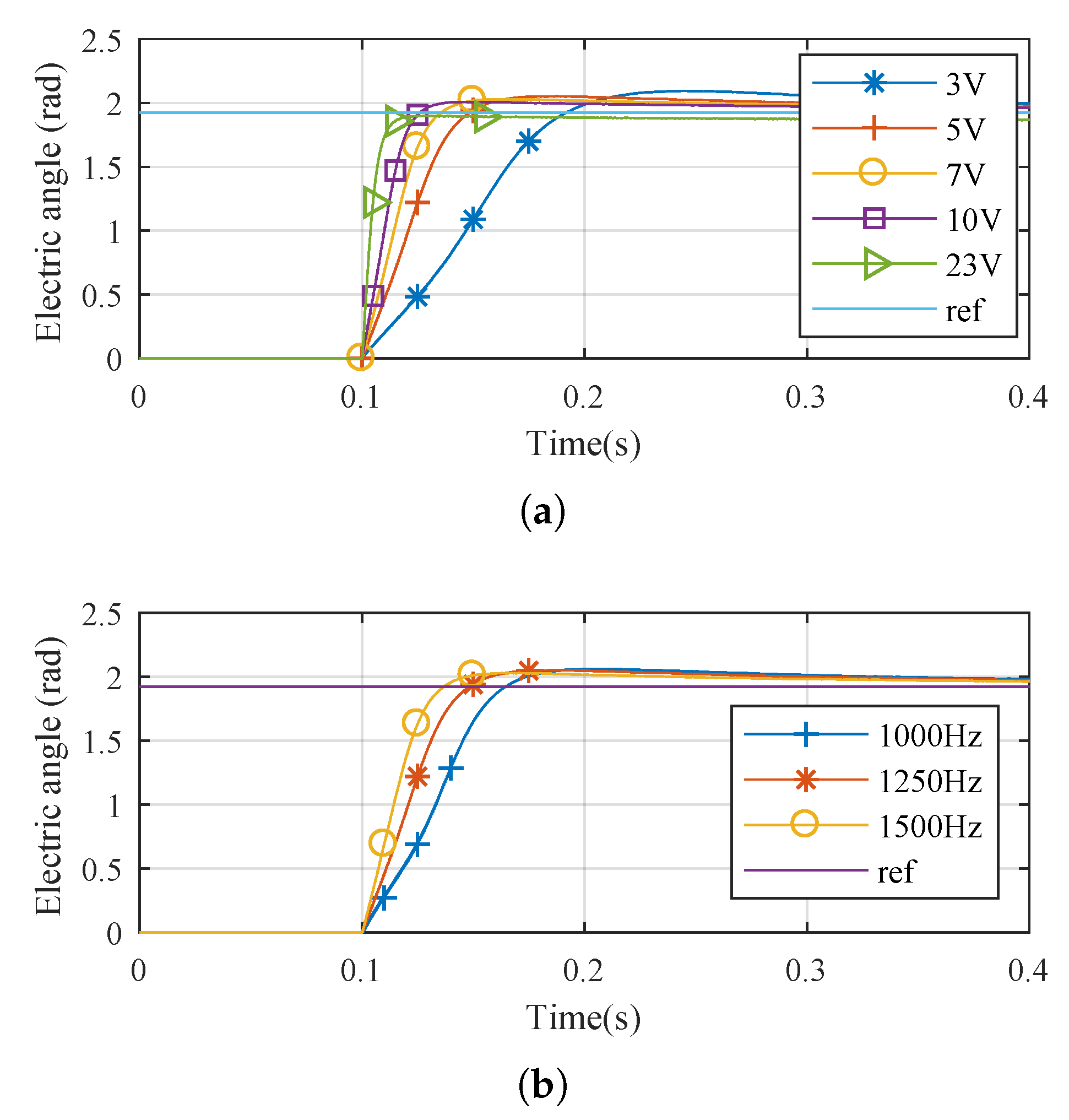
6.1. Frequency and Amplitude Voltage Selection
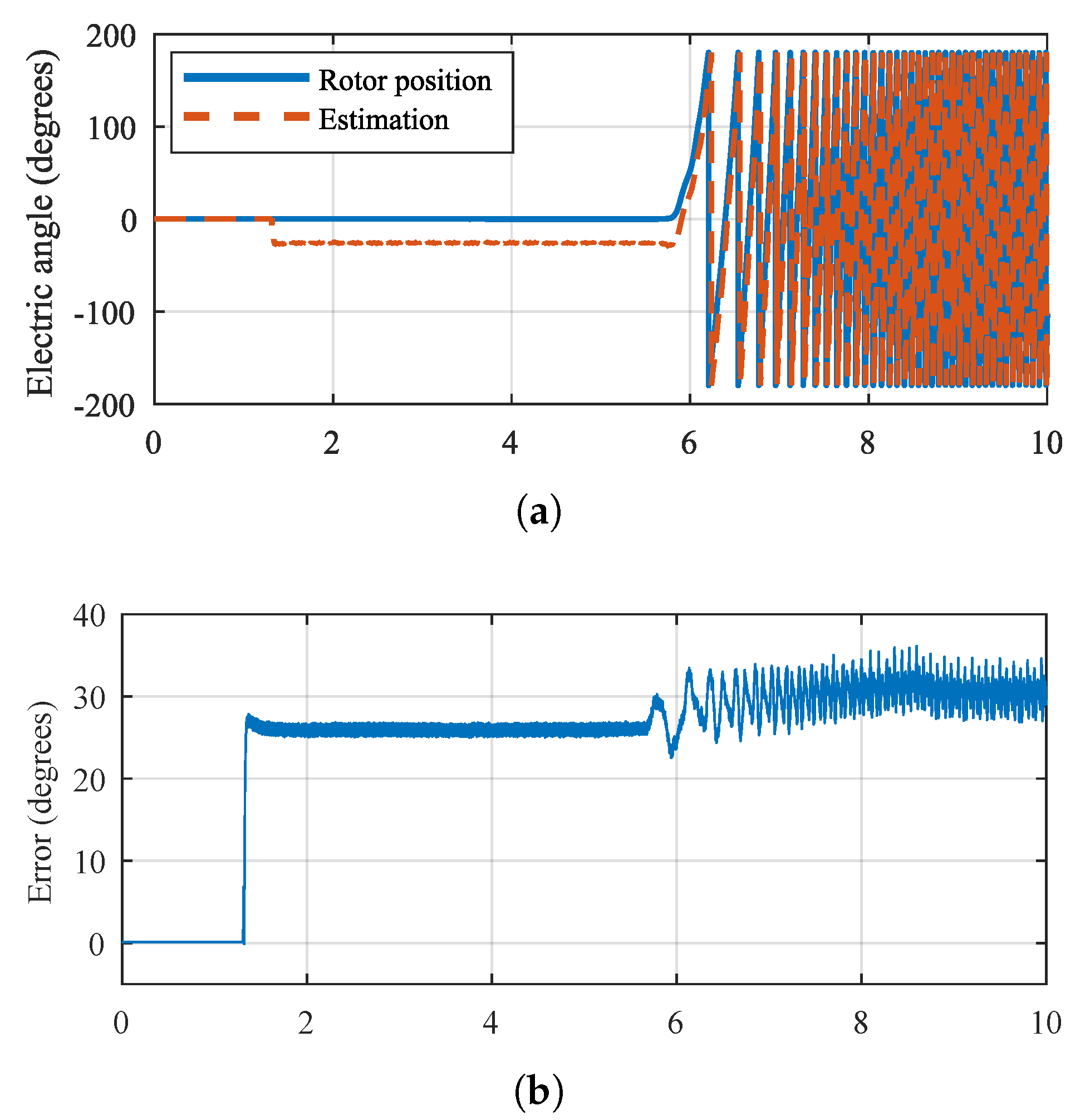
6.2. Comparison of Traditional and Proposed Demodulation Scheme
6.3. Full Sensorless Mode
7. Conclusions
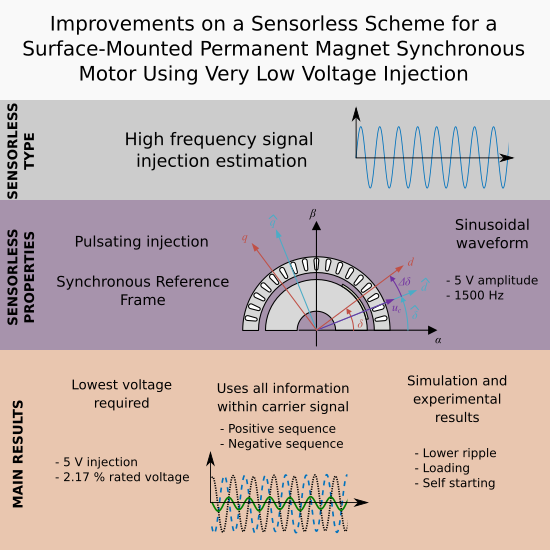
- As it was stated in Section 2, the amplitude of the voltage injected greatly affects the performance of the sensorless algorithm. In the approach proposed, only 5 V was needed for the algorithm to work, which represents only a 2.17% of the rated voltage of the machine under test. Higher values could render better results, but at the expense of louder noise, vibrations and losses. Similarly, the frequency injection was chosen so to maximize the bandwidth of the FOC controllers while achieving good resolution given the sampling time.
- The proposed demodulation method using all the information contained in the signal recovered provides far better results than the traditional scheme found in the literature. As commented in Section 3, given the frequency content of the two signals used, they compensate for errors and ripple produced from unwanted content during the processing. Simulation and experimental results validate the improvement achieved with the proposed algorithm. Nevertheless, the use of both sequences means extra computational effort for the microcontroller that could render the system unusable in systems with lower specifications.
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| S | Stator reference frame |
| Voltage injected | |
| High frequency current | |
| Filtered high frequency current | |
| Amplitude of the voltage injected | |
| Angular frequency of the signal injected | |
| j | Imaginary unit |
| Rotor angle (electrical radians) | |
| Estimated rotor angle (electrical radians) | |
| Error committed in the estimation | |
| Direct and quadrature inductances | |
| Estimated rotor angle (mechanical radians) | |
| p | Pole pairs |
| Linear regression coefficients | |
| Mechanical speed reference | |
| Cut-off frequency |
References
- Yan, Y.; Wang, S.; Xia, C.; Member, S.; Wang, H.; Shi, T. Hybrid Control Set-Model Predictive Control for Field-Oriented Control of VSI-PMSM. IEEE Trans. Energy Convers. 2016, 31, 1622–1633. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, J.; Cheng, M.; Chau, K.T. Field-oriented control and direct torque control for paralleled VSIs Fed PMSM drives with variable switching frequencies. IEEE Trans. Power Electron. 2016, 31, 2417–2428. [Google Scholar] [CrossRef]
- Lara, J.; Xu, J.; Chandra, A. Effects of Rotor Position Error in the Performance of Field-Oriented-Controlled PMSM Drives for Electric Vehicle Traction Applications. IEEE Trans. Ind. Electron. 2016, 63, 4738–4751. [Google Scholar] [CrossRef]
- Anuchin, A.; Astakhova, V.; Shpak, D.; Zharkov, A.; Briz, F. Optimized method for speed estimation using incremental encoder. In Proceedings of the 19th International Symposium on Power Electronics (Ee), Novi Sad, Serbia, 19–21 October 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Holtz, J. Sensorless Control of Induction Machines—With or Without Signal Injection? IEEE Trans. Ind. Electron. 2006, 53, 7–30. [Google Scholar] [CrossRef] [Green Version]
- Bojoi, R.; Pastorelli, M.; Bottomley, J.; Giangrande, P.; Gerada, C. Sensorless control of PM motor drives—A technology status review. In Proceedings of the 2013 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Paris, France, 11–12 March 2013; pp. 168–182. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, G.; Xu, D. Saliency-Based Position Sensorless Control Methods for PMSM Drives—A Review. Chin. J. Electr. Eng. 2017, 3, 14–23. [Google Scholar]
- Lee, D.; Akatsu, K. The study on transient performance improvement of position sensorless control algorithm for IPMSM. In Proceedings of the 2017 8th International Symposium on Sensorless Control for Electrical Drives (SLED), Catania, Italy, 18–19 September 2017; pp. 67–72. [Google Scholar] [CrossRef]
- Lindemann, G.; Weber, B.; Mertens, A. Reducing the Low-Speed Limit for Back-EMF Based Self-Sensing Speed Control by Using an FPGA-Operated Dead-Time Compensation. In Proceedings of the 2018 IEEE 9th International Symposium on Sensorless Control for Electrical Drives (SLED), Helsinki, Finland, 3–14 September 2018; pp. 60–65. [Google Scholar]
- Bao, D.; Pan, X.; Wang, Y.; Wang, X.; Li, K. Adaptive Synchronous-Frequency Tracking-Mode Observer for the Sensorless Control of a Surface PMSM. IEEE Trans. Ind. Appl. 2018, 54, 6460–6471. [Google Scholar] [CrossRef]
- Linke, M.; Member, S.; Kennel, R.; Member, S.; Holtz, J. Sensorless position control of Permanent Magnet Synchronous Machines without Limitation at Zero Speed. In Proceedings of the IEEE 2002 28th Annual Conference of the Industrial Electronics Society, IECON 02, Sevilla, Spain, 5–8 November 2002. [Google Scholar]
- Briz, F.; Degner, M.W.; García, P.; Lorenz, R.D. Comparison of saliency-based sensorless control techniques for AC machines. IEEE Trans. Ind. Appl. 2004, 40, 1107–1115. [Google Scholar] [CrossRef]
- Holtz, J. Acquisition of position error and magnet polarity for sensorless control of PM synchronous machines. IEEE Trans. Ind. Appl. 2008, 44, 1172–1180. [Google Scholar] [CrossRef]
- Xu, P.; Zhu, Z. Novel Carrier Signal Injection Method Using Zero Sequence Voltage for Sensorless Control of PMSM Drives. IEEE Trans. Ind. Electron. 2016, 63, 2053–2061. [Google Scholar] [CrossRef]
- Degner, M.W.; Lorenz, R.D. Position Estimation in Induction Machines Utilizing Signal Injection. IEEE Trans. Ind. Appl. 2000, 36, 736–742. [Google Scholar] [CrossRef] [Green Version]
- Trancho, E.; Ibarra, E.; Arias, A.; Salazar, C.; Lopez, I.; Diaz De Guereñu, A.; Peña, A. A novel PMSM hybrid sensorless control strategy for EV applications based on PLL and HFI. In Proceedings of the IECON Proceedings (Industrial Electronics Conference), Florence, Italy, 23–26 October 2016; pp. 6669–6674. [Google Scholar] [CrossRef] [Green Version]
- García, P.; Briz, F.; Degner, M.W.; Díaz-Reigosa, D. Accuracy and bandwidth limits of carrier signal injection-based sensorless control methods. In Proceedings of the Conference Record of the 2006 IEEE Industry Applications Conference Forty-First IAS Annual Meeting, Tampa, FL, USA, 8–12 October 2006; Volume 2, pp. 897–904. [Google Scholar] [CrossRef]
- Hwang, C.E.; Lee, Y.; Sul, S.K. Analysis on the position estimation error in position-Sensorless operation using pulsating square wave signal injection. IEEE Trans. Ind. Appl. 2019, 55, 844–850. [Google Scholar] [CrossRef]
- Kim, S.I.; Im, J.H.; Song, E.Y.; Kim, R.Y. A New Rotor Position Estimation Method of IPMSM Using All-Pass Filter on High-Frequency Rotating Voltage Signal Injection. IEEE Trans. Ind. Electron. 2016, 63, 6499–6509. [Google Scholar] [CrossRef]
- Tang, Q.; Shen, A.; Luo, X.; Xu, J. PMSM Sensorless Control by Injecting HF Pulsating Carrier Signal into ABC Frame. IEEE Trans. Power Electron. 2017, 32, 3767–3776. [Google Scholar] [CrossRef]
- Ni, R.; Xu, D.; Blaabjerg, F.; Lu, K.; Wang, G.; Zhang, G. Square-wave voltage injection algorithm for PMSM position sensorless control with high robustness to voltage errors. IEEE Trans. Power Electron. 2017, 32, 5425–5437. [Google Scholar] [CrossRef]
- Xie, G.; Lu, K.; Dwivedi, S.K.; Rosholm, J.R.; Blaabjerg, F. Minimum-Voltage Vector Injection Method for Sensorless Control of PMSM for Low-Speed Operations. IEEE Trans. Power Electron. 2016, 31, 1785–1794. [Google Scholar] [CrossRef]
- Xu, P.; Zhu, Z. Carrier signal injection-based sensorless control for permanent magnet synchronous machine drives with tolerance of signal processing delays. IET Electr. Power Appl. 2017, 11, 1140–1149. [Google Scholar] [CrossRef]
- Luo, X.; Tang, Q.; Shen, A.; Zhang, Q. PMSM Sensorless Control by Injecting HF Pulsating Carrier Signal into Estimated Fixed-Frequency Rotating Reference Frame. IEEE Trans. Ind. Electron. 2016, 63, 2294–2303. [Google Scholar] [CrossRef]
- Lin, T.C.; Zhu, Z.Q. Sensorless operation capability of surface-mounted permanent-magnet machine based on high-frequency signal injection methods. IEEE Trans. Ind. Appl. 2015, 51, 2161–2171. [Google Scholar] [CrossRef]
- Moghadam, M.A.G.; Tahami, F. Sensorless control of PMSMs with tolerance for delays and stator resistance uncertainties. IEEE Trans. Power Electron. 2013, 28, 1391–1399. [Google Scholar] [CrossRef]
- Jin, X.; Ni, R.; Chen, W.; Blaabjerg, F.; Xu, D. High-Frequency Voltage-Injection Methods and Observer Design for Initial Position Detection of Permanent Magnet Synchronous Machines. IEEE Trans. Power Electron. 2018, 33, 7971–7979. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Voltage Injection | % of Rated Voltage |
|---|---|---|
| [26] | 100 V | 78.74 |
| [18] | 40 V | 66.6 |
| [22] | 45 V | 56.25 |
| [21] | 30 V | 40.65 |
| [19] | 40 V | 33.33 |
| [23] | 45 V | 28.48 |
| [14] | 4 V | 11.11 |
| [24] | 20 V | 9.09 |
| [20] | V | 3.52 |
| Parameter | Value | Units |
|---|---|---|
| Sampling frequency | 10 | kHz |
| Switching frequency | 10 | kHz |
| Injection voltage | 5 | V |
| Injection frequency | 1500 | Hz |
| Analog LPF | 3.2 | kHz |
| d current loop digital LPF | 500 | Hz |
| Estimator LPF | 500 | Hz |
| Estimation compensation coefficient | 0.0083 | - |
| Estimation compensation coefficient | 0.0091 | - |
| DC bus voltage | 100 | V |
| PMSM rated power | 6700 | W |
| Rated voltage | 230 | V |
| Rated speed | 3000 | rpm |
| Rated torque at 3000 rpm | N·m | |
| Rated current at 3000 rpm | 23.7 A | A |
| Stator resistance | ||
| direct axis inductance | H | |
| quadrature axis inductance | H | |
| Magnet flux | V·s/rad | |
| Rotor inertia | kg·m | |
| Viscous friction coefficient | N·m·s | |
| Pole pairs | 4 | - |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pando-Acedo, J.; Romero-Cadaval, E.; Milanes-Montero, M.I.; Barrero-Gonzalez, F. Improvements on a Sensorless Scheme for a Surface-Mounted Permanent Magnet Synchronous Motor Using Very Low Voltage Injection. Energies 2020, 13, 2732. https://doi.org/10.3390/en13112732
Pando-Acedo J, Romero-Cadaval E, Milanes-Montero MI, Barrero-Gonzalez F. Improvements on a Sensorless Scheme for a Surface-Mounted Permanent Magnet Synchronous Motor Using Very Low Voltage Injection. Energies. 2020; 13(11):2732. https://doi.org/10.3390/en13112732
Chicago/Turabian StylePando-Acedo, Jaime, Enrique Romero-Cadaval, Maria Isabel Milanes-Montero, and Fermin Barrero-Gonzalez. 2020. "Improvements on a Sensorless Scheme for a Surface-Mounted Permanent Magnet Synchronous Motor Using Very Low Voltage Injection" Energies 13, no. 11: 2732. https://doi.org/10.3390/en13112732