Modular Self-Balancing Battery Charger Concept for Cost-Effective Power-Assist Wheelchairs



Abstract
:1. Introduction
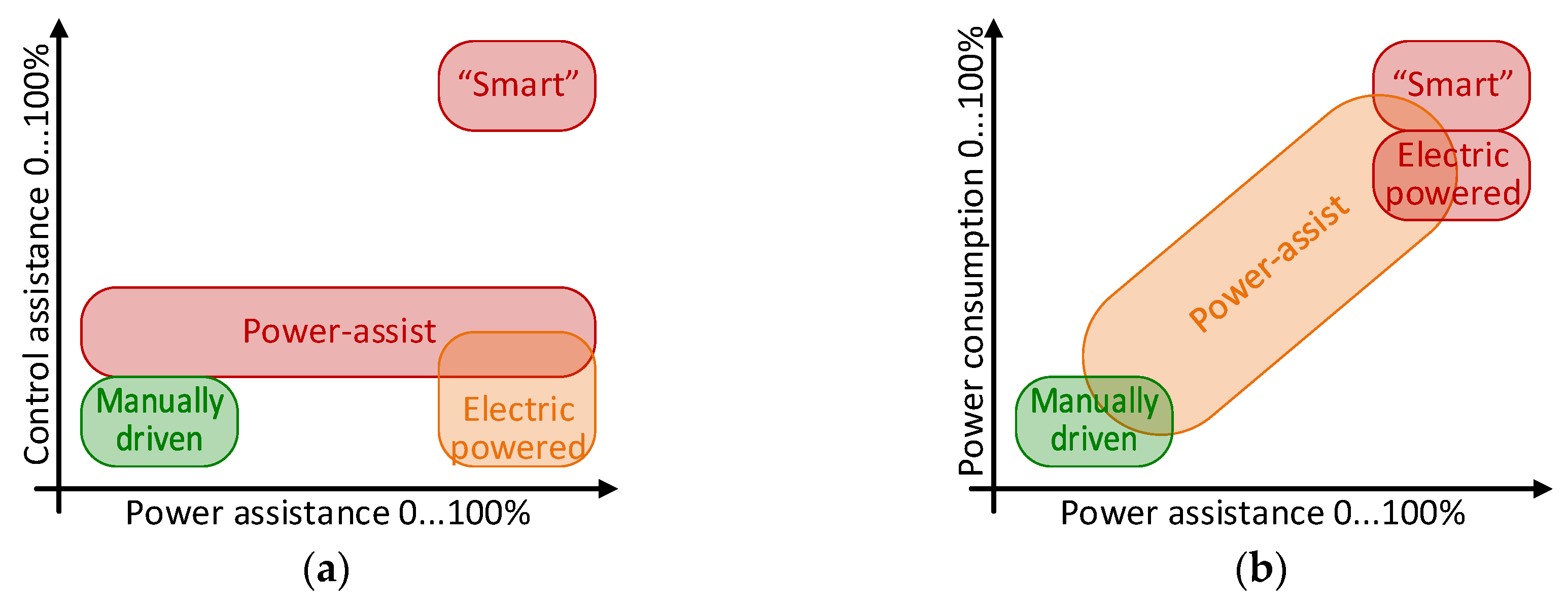
1.1. Wheelchairs Users and Types
1.2. Concept of a Cost-Effective Adoptable Power-Assist Wheelchair
1.3. Electrical Parameters of the Charger
- Charger shall be able to simultaneously charge two battery packs.
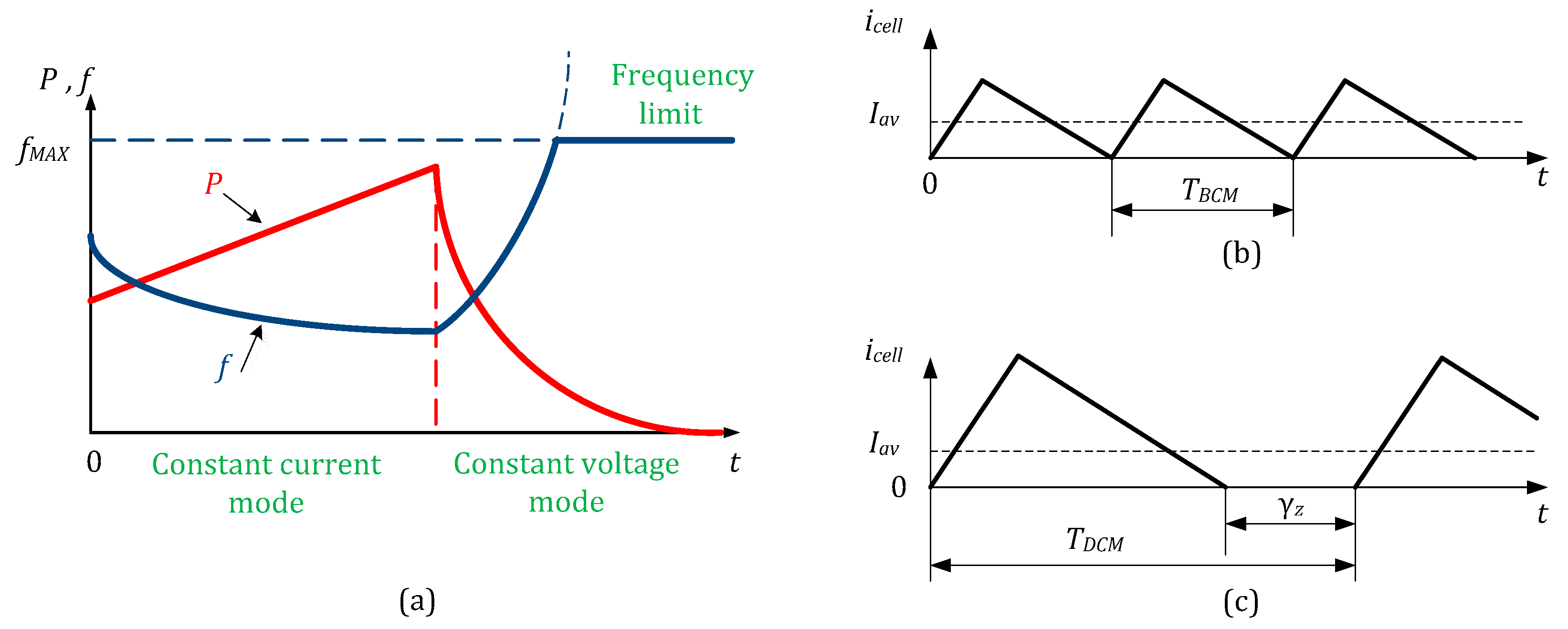
- Battery shall be charged using Constant Current – Constant Voltage (CC–CV) charging mode.
- During CC charging, the charger shall be able to provide at least 12 A current for a single battery pack.
- During CV charging, the charger shall be able to charge battery pack to 29.4 V (or 7 Li-Ion cells with rated voltage 4.2V each).
- Maximal charging power is 400 W per channel.
- Charger shall stop charging once the charging current drops below 10% of the initially set current value.
- Charger shall be able to start charging if the battery voltage is below 14 V.
- Charger shall be able to communicate with the battery pack.
- Battery pack shall provide information about charging current to the charger.
- Battery pack shall be able to stop charging via communication.
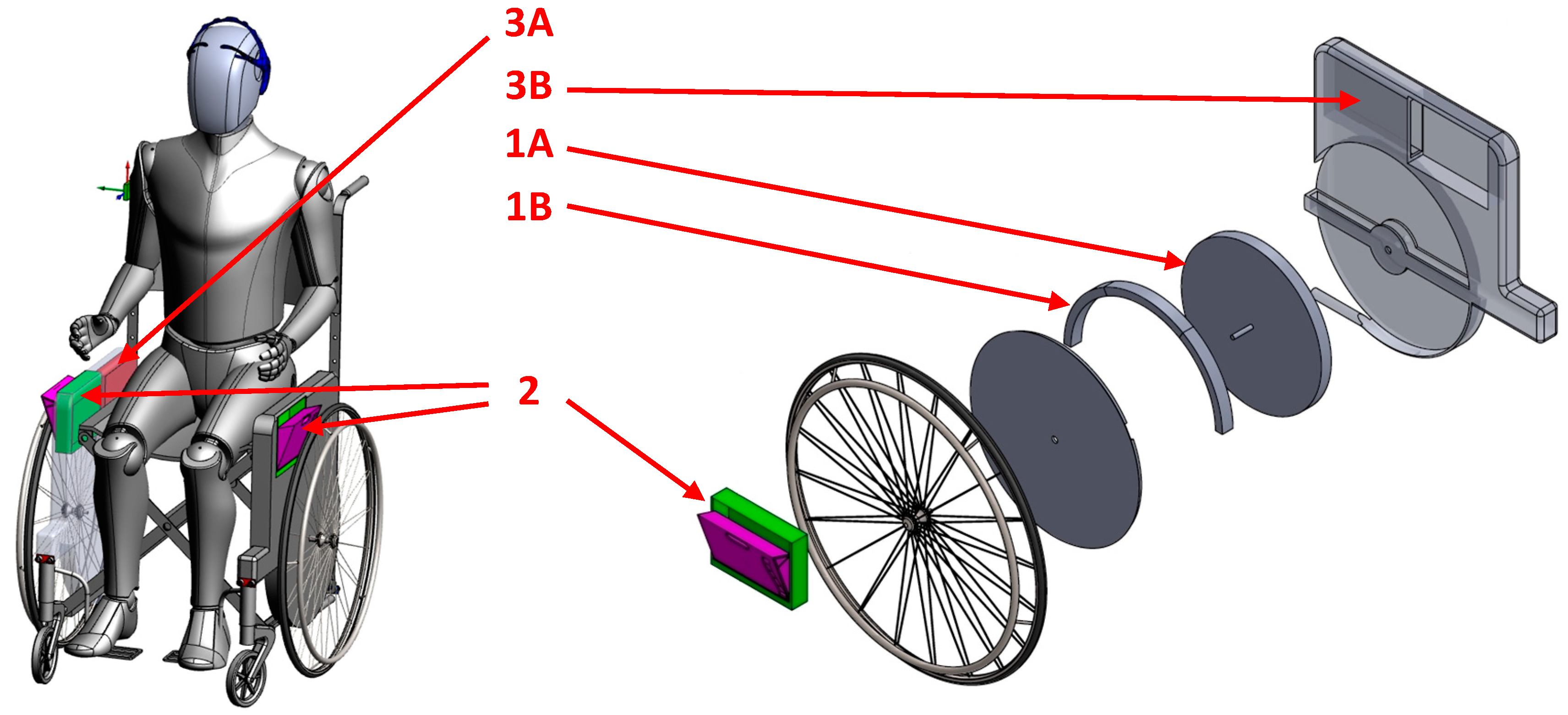
- Charger shall be designed to be able to be installed inside wheelchair’s side box.
- Charger shall be designed in such a manner that the user shall be able to easily remove the charger from the wheelchair.
- The charger shall be designed to provide on-board and off-board charging.
- For on-board charging, there shall be a dedicated port to charge one battery pack that is in the same side box, while another port shall be used to connect a cable to the other side box where the other battery is located.
- For off-board charging, there shall be two special ports on the charger. These special ports shall be used to plug in both batteries.
- Charger shall have a standard cable to connect to an electrical grid.
- Charger shall conform to relevant EU directives/regulations and Electromagnetic Compatibility (EMC) requirements, in particular, the alternating supply voltage (AC) is 250 V ±15%.
- The shape of the charger shall be a rectangular prism. The main limiting dimension is height—max 40 mm. Charger shall lay flat when removed from the side box.
2. Topology and Design of the Charger
2.1. Analysis Power Factor Correction (PFC) Topologies and Choice of Topology for Charger
- It operates as a voltage follower, meaning that the input current naturally follows the input voltage and a current control loop can be omitted;
- galvanic isolation can be easily implemented and several isolated outputs provided;
- the input current ripple is constant (assuming interleaving) and defined during the design stage;
- can operate as step-up or step-down converter
- Zero-Voltage Switching (ZVS) of the primary transistor and Zero-Current Switching (ZCS) of the output diode is provided.
2.2. Proposed Charger Concept
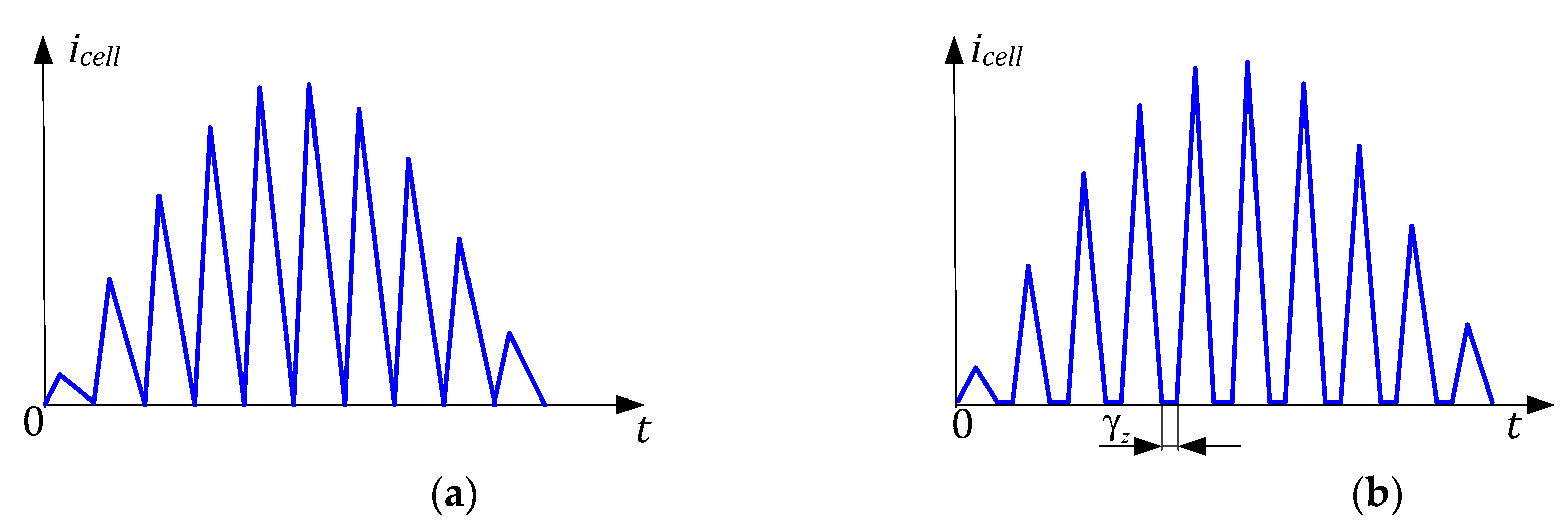
2.3. Charger Control Strategy
2.4. Parameter Calculation and Component Selection
3. Evaluation Methods and Results
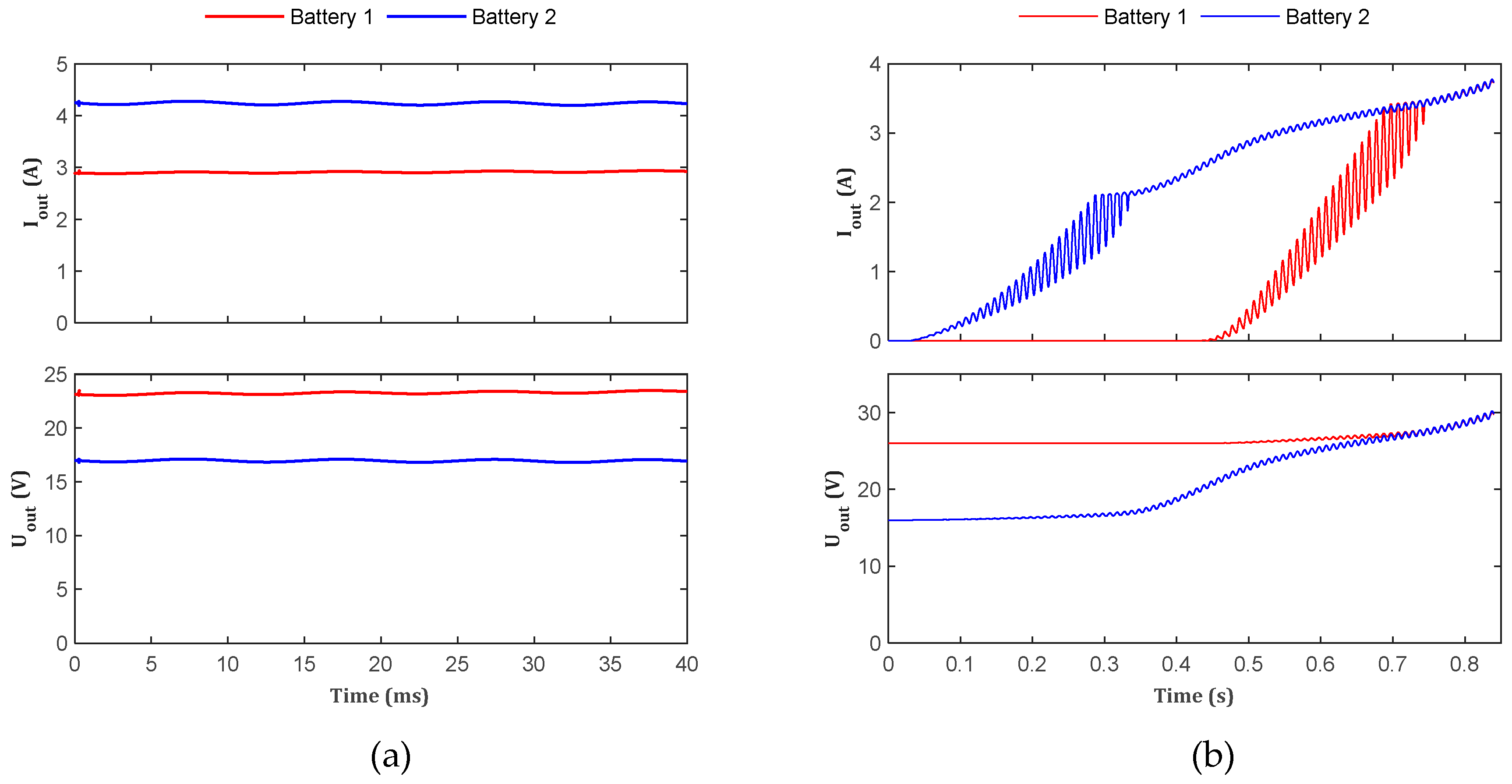
3.1. Simulation
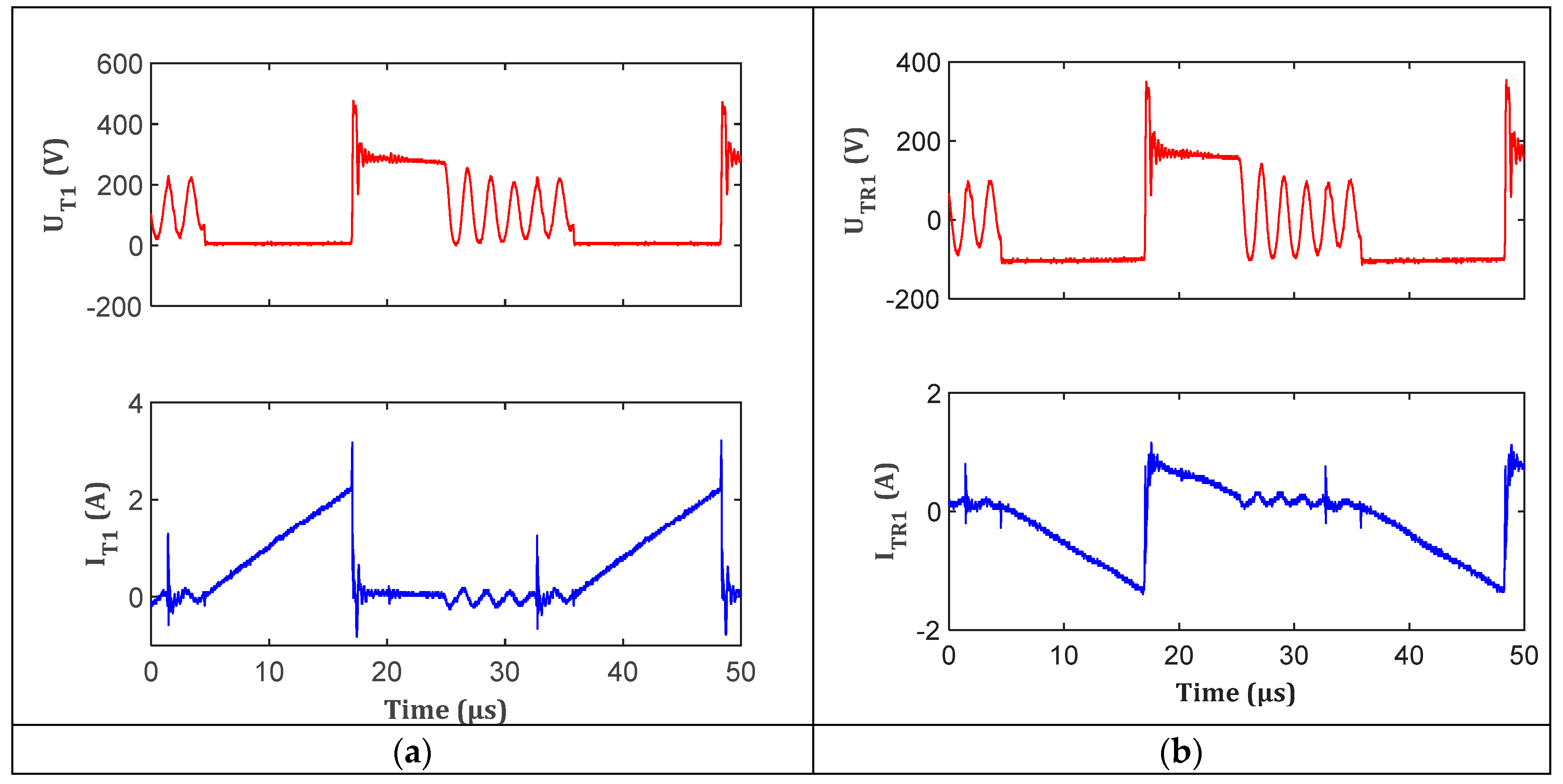
3.2. Experimental Verification
4. Discussion, Conclusions and Considerations for Future Works
- Single-stage SEPIC features relatively low component count and simple control;
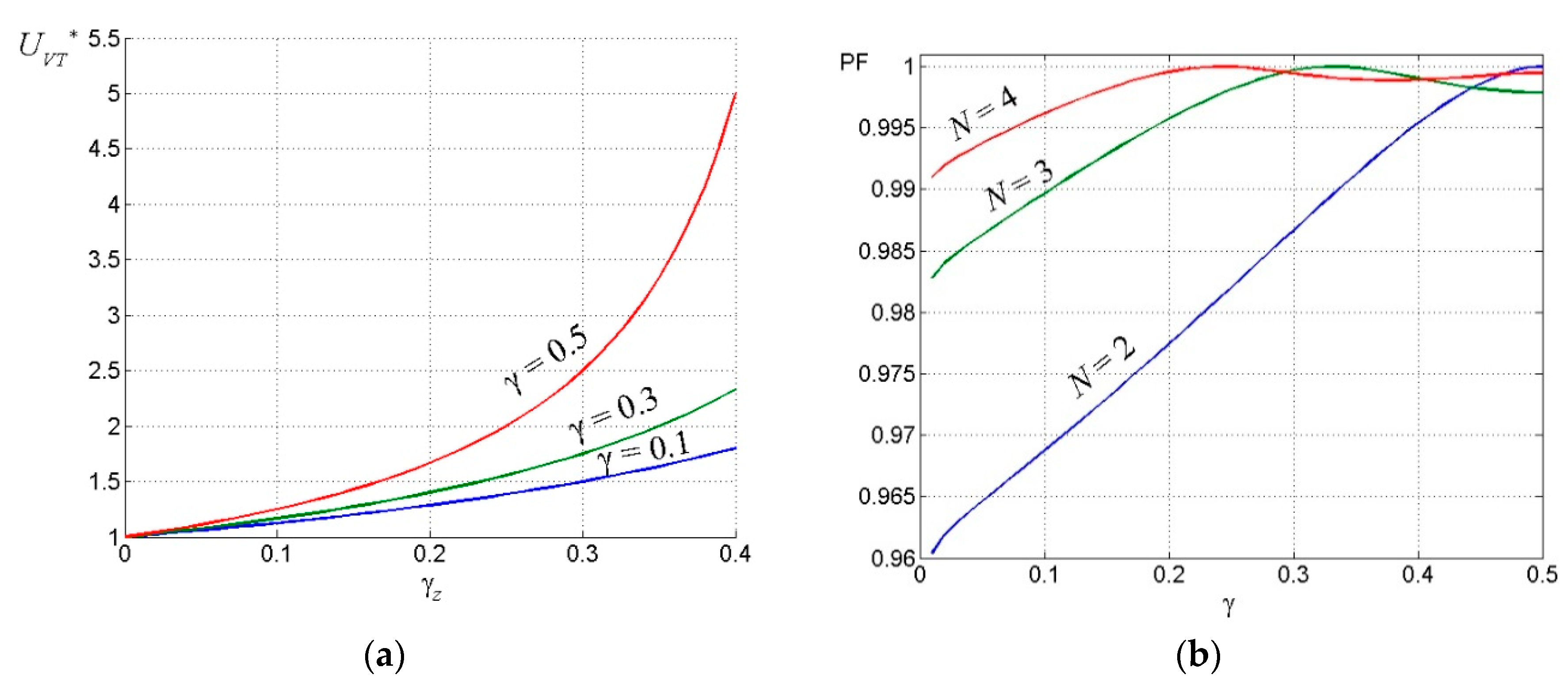
- multi-cell configuration reduces the input current ripple, harmonic distortion and achieves unity power factor;
- natural charge balancing of batteries with different state of charge is provided;
- operation in boundary and discontinuous conduction modes simplifies the design and can provide sufficient conversion efficiency.
Author Contributions
Funding
Conflicts of Interest
References
- World Health Organization. World report on disability 2011. Am. J. Phys. Med. Rehabil. Assoc. Acad. Physiatr. 2011, 91, 549. [Google Scholar]
- Kraus, L.; Lauer, E.; Coleman, R.; Houtenville, A. 2017 Disability Statistics Annual Report; University of New Hampshire: Durham, NH, USA, 2018. [Google Scholar]
- Disability Statistics 2015. Available online: http://ec.europa.eu/eurostat/statistics-explained/index.php/Disability_statistics (accessed on 27 February 2019).
- Dudgeon, B.J.; Deitz, J.C.; Dimpfel, M. Wheelchair Selection. In Occupational Therapy for Physical Dysfunction, 7th ed.; Lippincott Williamns & Wilkins Editors: Philadelphia, PA, USA, 2013. [Google Scholar]
- Ding, D.; Cooper, R.A. Electric powered wheelchairs. IEEE Control Syst. Mag. 2005, 25, 22–34. [Google Scholar]
- Hou, R.; Shi, X.; Krishnamurthy, M. Design and implementation of a novel power assisted drivetrain for a wheelchair. In Proceedings of the IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 18–20 June 2012; pp. 1–6. [Google Scholar]
- Yang, Y.-P.; Lin, H.-C.; Tsai, F.-C.; Lu, C.-T.; Tu, K.-H. Design and integration of dual power wheels with rim motors for a powered wheelchair. IET Electr. Power Appl. 2012, 6, 419. [Google Scholar] [CrossRef]
- Galkin, I.; Podgornovs, A.; Blinov, A.; Vitols, K.; Vorobyov, M.; Kosenko, R. Considerations regarding the concept of cost-effective power-assist wheelchair subsystems. Electr. Control Commun. Eng. 2018, 14, 71–80. [Google Scholar] [CrossRef]
- Vorobyov, M.; Galkin, I. Concept of cost-effective power-assisted wheelchair: Human-in-the-loop subsystem. In Proceedings of the 5th IEEE Workshop on Advances in Information, Electronic and Electrical Engineering (AIEEE), Riga, Latvia, 24–25 November 2017; pp. 1–5. [Google Scholar]
- Vitols, K.; Podgornovs, A. Concept of cost-effective power-assist wheelchair’s electrical subsystem. In Proceedings of the 5th IEEE Workshop on Advances in Information, Electronic and Electrical Engineering (AIEEE), Riga, Latvia, 24–25 November 2017; pp. 1–4. [Google Scholar]
- Geidarovs, R.; Podgornovs, A.; Galkin, I. Simulation and Initial Evaluation of Modular Motor-Generator for Cost-Effective Power-Assist Wheelchair. In Proceedings of the IEEE 59th International Scientific Conference on Power and Electrical Engineering of Riga Technical University (RTUCON), Riga, Latvia, 12–13 November 2018; pp. 1–5. [Google Scholar]
- Vitols, K. Analysis of Battery Cell Configuration in Respect to Powered Wheelchair Drive Efficiency. J. Pol. Acad. Sci. under review.
- International Standard ISO7176: Wheelchairs. Part 4: Energy Consumption of Electric Wheelchairs and Scooters for Determination of Theoretical Distance Range. Available online: https://www.iso.org/standard/40991.html (accessed on 27 February 2019).
- European Standard prEN 12184:2004: Electrically Powered Wheelchairs, Scooters and Their Chargers—Requirements and Test Methods. Available online: https://www.sustainable-design.ie/fire/ElectricWheelchairs_DRAFTprEN12184.pdf (accessed on 27 February 2019).
- Latvian State Standard LVS EN 12184: Electrically Powered Wheelchairs, Scooters and Their Chargers—Requirements and Test Methods. Available online: https://infostore.saiglobal.com/preview/98696469803.pdf?sku=857543_SAIG_NSAI_NSAI_2040022 (accessed on 27 February 2019).
- Chub, A.; Vinnikov, D.; Liivik, E.; Jalakas, T. Multiphase Quasi-Z-Source DC–DC Converters for Residential Distributed Generation Systems. IEEE Trans. Ind. Electr. 2018, 65, 8361–8371. [Google Scholar] [CrossRef]
- Chub, A.; Vinnikov, D.; Kosenko, R.; Liivik, E.; Galkin, I. Bidirectional DC-DC Converter for Modular Residential Battery Energy Storage Systems. IEEE Trans. Ind. Electr. 2019. accepted. [Google Scholar] [CrossRef]
- Singh, B.; Singh, S.; Chandra, A.; Al-Haddad, K. Comprehensive Study of Single-Phase AC-DC Power Factor Corrected Converters with High-Frequency Isolation. IEEE Trans. Ind. Inform. 2011, 7, 540–556. [Google Scholar] [CrossRef]
- Canales, F.; Abud, D.; Arau, J.; Jimenez, G. Design of a two stage, 1 kW battery charger with power factor correction. In Proceedings of the Fifth International Conference on Power Electronics and Variable-Speed Drives, London, UK, 26–28 October 1994; pp. 626–631. [Google Scholar]
- Gautam, D.; Musavi, F.; Edington, M.; Eberle, W.; Dunford, W.G. An automotive on-board 3.3 kW battery charger for PHEV application. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011; pp. 1–6. [Google Scholar]
- Lee, B.; Lee, J.; Kang, D. An Isolated PFC Converter with Harmonic Modulation Technique for EV Chargers. In Proceedings of the International Power Electronics Conference (IPEC-Niigata 2018 -ECCE Asia), Niigata, Japan, 20–24 May 2018; pp. 3030–3033. [Google Scholar]
- Wang, X.; Ben, H.; Meng, T.; Liu, B. An auxiliary link based on flyback circuit with voltage spike suppression for single-phase isolated full-bridge boost PFC. In Proceedings of the IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016; pp. 1333–1337. [Google Scholar]
- Dusmez, S.; Li, X.; Akin, B. A Fully Integrated Three-Level Isolated Single-Stage PFC Converter. IEEE Trans. Power Electr. 2015, 30, 2050–2062. [Google Scholar] [CrossRef]
- Jindong Zhang, M.; Jovanovic, M.; Lee, F.C. Comparison between CCM single-stage and two-stage boost PFC converters. In Proceedings of the APEC ’99, Fourteenth Annual Applied Power Electronics Conference and Exposition, 1999 Conference Proceedings (Cat. No.99CH36285), Dallas, TX, USA, 14–18 March 1999; Volume 1, pp. 335–341. [Google Scholar]
- Qiao, C.; Smedley, K.M. A topology survey of single-stage power factor corrector with a boost type input-current-shaper. IEEE Trans. Power Electr. 2001, 16, 360–368. [Google Scholar] [CrossRef]
- Simonetti, D.S.L.; Sebastian, J.; dos Reis, F.S.; Uceda, J. Design criteria for SEPIC and Cuk converters as power factor preregulators in discontinuous conduction mode. In Proceedings of the 1992 International Conference on Industrial Electronics, Control, Instrumentation, and Automation, San Diego, CA, USA, 9–13 November 1992; Volume 1, pp. 283–288. [Google Scholar]
- Tibola, G.; Lemmen, E.; Barbi, I. Three-phase isolated DCM SEPIC converter for high voltage applications. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–8. [Google Scholar]
- Li, C.; Zhang, Y.; Cao, Z.; Xu, D. Single-Phase Single-Stage Isolated ZCS Current-Fed Full-Bridge Converter for High-Power AC/DC Applications. IEEE Trans. Power Electr. 2017, 32, 6800–6812. [Google Scholar] [CrossRef]
- Ayyanar, R.; Mohan, N.; Sun, J. Single-stage three-phase power-factor-correction circuit using three isolated single-phase SEPIC converters operating in CCM. In Proceedings of the 2000 IEEE 31st Annual Power Electronics Specialists Conference. Conference Proceedings (Cat. No.00CH37018), Galway, Ireland, 23 June 2000; Volume 1, pp. 353–358. [Google Scholar]
- Simonetti, D.S.L.; Sebastian, J.; Uceda, J. The discontinuous conduction mode Sepic and Cuk power factor preregulators: Analysis and design. IEEE Trans. Ind. Electron. 1997, 44, 630–637. [Google Scholar] [CrossRef]
- Chen, R.; Lai, J. Analysis and design of DCM SEPIC PFC with adjustable output voltage. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 477–484. [Google Scholar]
- Shi, C.; Khaligh, A.; Wang, H. Interleaved SEPIC Power Factor Preregulator Using Coupled Inductors in Discontinuous Conduction Mode with Wide Output Voltage. IEEE Trans. Ind. Appl. 2016, 52, 3461–3471. [Google Scholar] [CrossRef]
- Ryu, D.-K.; Kim, Y.-H.; Kim, J.-G.; Won, C.-Y.; Jung, Y.-C. Interleaved Active Clamp Flyback Inverter using a Synchronous Rectifier for a Photovoltaic AC Module System. In Proceedings of the 8th International Conference on Power Electronics—ECCE Asia, The Shilla Jeju, Korea, 30 May–3 June 2011; pp. 2631–2636. [Google Scholar]
- Verbytskyi, I.; Bondarenko, O.; Liivik, E. Control features of multicell-type current regulator for resistance welding. In Proceedings of the IEEE 58th International Scientific Conference on Power and Electrical Engineering of Riga Technical University (RTUCON), Riga, Latvia, 12–13 October 2017; pp. 1–5. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Variable | Data Source | Value |
|---|---|---|---|
| Cruise speed (>70%) | v | LVS12184 | 5 km/h = 1.4 m/s |
| Max speed | vmax | LVS12184 | 15 km/h = 4.2 m/s |
| Operation time | T | LVS12184 | 1 h |
| Mass | m | Task definition | 120 kg |
| Charge/discharge efficiency | ηB | Battery datasheet | 0.8 |
| Coefficient of rolling resistance (rubber-concrete) | F | Task definition | 15…35 mm |
| Wheel radius | R | Task definition | 300 mm |
| Component | Value |
|---|---|
| L1 | 1.6 mH |
| T1 | 1.4 A, 745 V |
| C1 | 0.25 μF, 400 V |
| TF | n = 0.1, LTF1 = 0.75 mH |
| D11 | 12.5 A, 70 V |
| C2 | 6.8 mF, 32 V |
| Initial SOC, % | Parameter | N = 2 | N = 4 | ||||
|---|---|---|---|---|---|---|---|
| γz = 0 | γz = 0.15 | γz = 0.3 | γz = 0 | γz = 0.15 | γz = 0.3 | ||
| 0% | PF_av THD_av | 0.9955 0.094 | 0.9947 0.102 | 0.9771 0.213 | 0.9983 0.057 | 0.9978 0.065 | 0.9962 0.086 |
| 30% | PF_av THD_av | 0.9989 0.046 | 0.9970 0.077 | 0.9745 0.224 | 0.9987 0.051 | 0.9978 0.065 | 0.9971 0.076 |
| 80% | PF_av THD_av | 0.9997 0.023 | 0.9962 0.087 | 0.9727 0.232 | 0.9989 0.047 | 0.9980 0.064 | 0.9972 0.075 |
| Parameter | Variable | Type/Value |
|---|---|---|
| Input voltage | Uin | 230 V AC (±15%) |
| Output voltage | Uout | 14…32 V DC |
| Operating frequency | fmax | 64 kHz |
| Transformer turns ratio | n | 60:7:7, 0.7 mm copper wire |
| Transformer inductance | LTR | 840 µH |
| Transformer leakage inductance | Llk | 20 µH |
| Transformer/inductor core | - | Е30-15-7 |
| Inductance | L1 | 1.7 mH/94 turns, 0.55 mm copper wire |
| Capacitance | C1 | MCKSK450M4R7G20S, 450 V/4.7 µF |
| Output capacitance | C2 | UVR1V103MRD6, 35 V/10 mF |
| Primary MOSFET | T1 | C3M0120090D |
| Secondary diode | D1 | STPS30H100CW |
| MOSFET driver | - | IRS44273L |
| Microcontroller | - | STM32F334 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Galkin, I.; Blinov, A.; Verbytskyi, I.; Zinchenko, D. Modular Self-Balancing Battery Charger Concept for Cost-Effective Power-Assist Wheelchairs. Energies 2019, 12, 1526. https://doi.org/10.3390/en12081526
Galkin I, Blinov A, Verbytskyi I, Zinchenko D. Modular Self-Balancing Battery Charger Concept for Cost-Effective Power-Assist Wheelchairs. Energies. 2019; 12(8):1526. https://doi.org/10.3390/en12081526
Chicago/Turabian StyleGalkin, Ilya, Andrei Blinov, Ievgen Verbytskyi, and Denys Zinchenko. 2019. "Modular Self-Balancing Battery Charger Concept for Cost-Effective Power-Assist Wheelchairs" Energies 12, no. 8: 1526. https://doi.org/10.3390/en12081526