When the solution of the response surface method is running, the nonlinearity of the statistical model should be examined. Therefore, the curvature of the statistical model is calculated in this paper. The OPSO method is proposed to find the exact optimal solution in the entire range. If the OPSO method is not used, a local optimal point might be found. However, it might not be the exact solution in the global range for this problem. Therefore, this problem should be avoid and overcome.
5.1. OPSO Modeling in Cloud Model
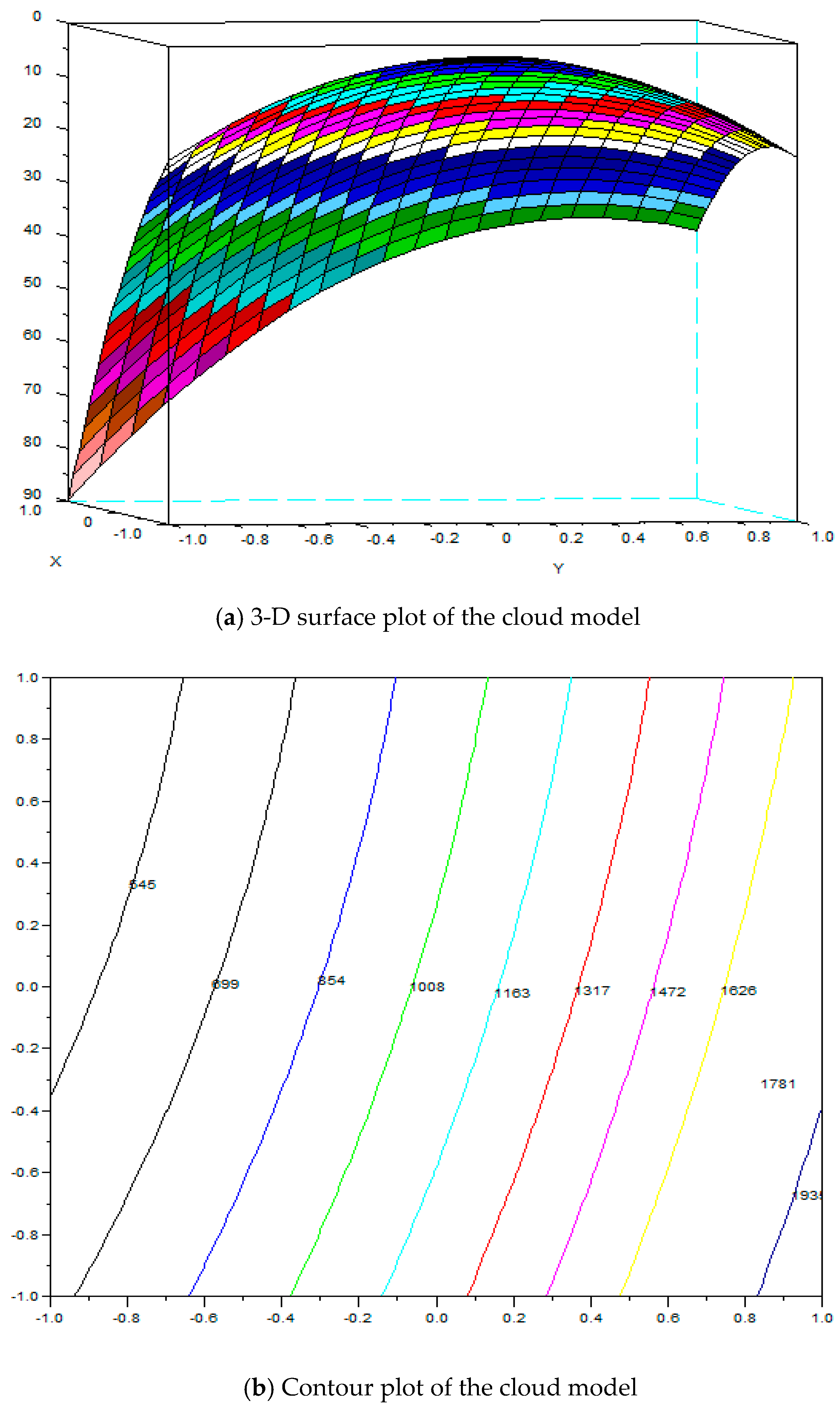
With the above derived system model by response surface method, the optimization process is performed to derive the optimal solution set for this problem. Based on the derived system statistical model, deriving the optimal solution is required. However, the optimal solution may be located anywhere in the range of [−1.0 and +1.0].
The local optimal solution for a non-linear model may not be the optimal one in the global region, therefore, the OPSO process is used to derive the optimal solution in an efficient way. In OPSO method, the local point and global point are searched at the same time and the global optimal solution can be found
By adding random seeds into the formulation, the OPSO method can jump out of the local optimal solution if the global solution is more optimal than the local solution. In the following, the OSPO formulation is performed.
In the response surface method, non-linear problems are approximated as first-order statistical model problems. However, the curvature for this first-order model is large. That means the nonlinearity property is still obvious in this problem. This influences the search process when finding the optimal solution.
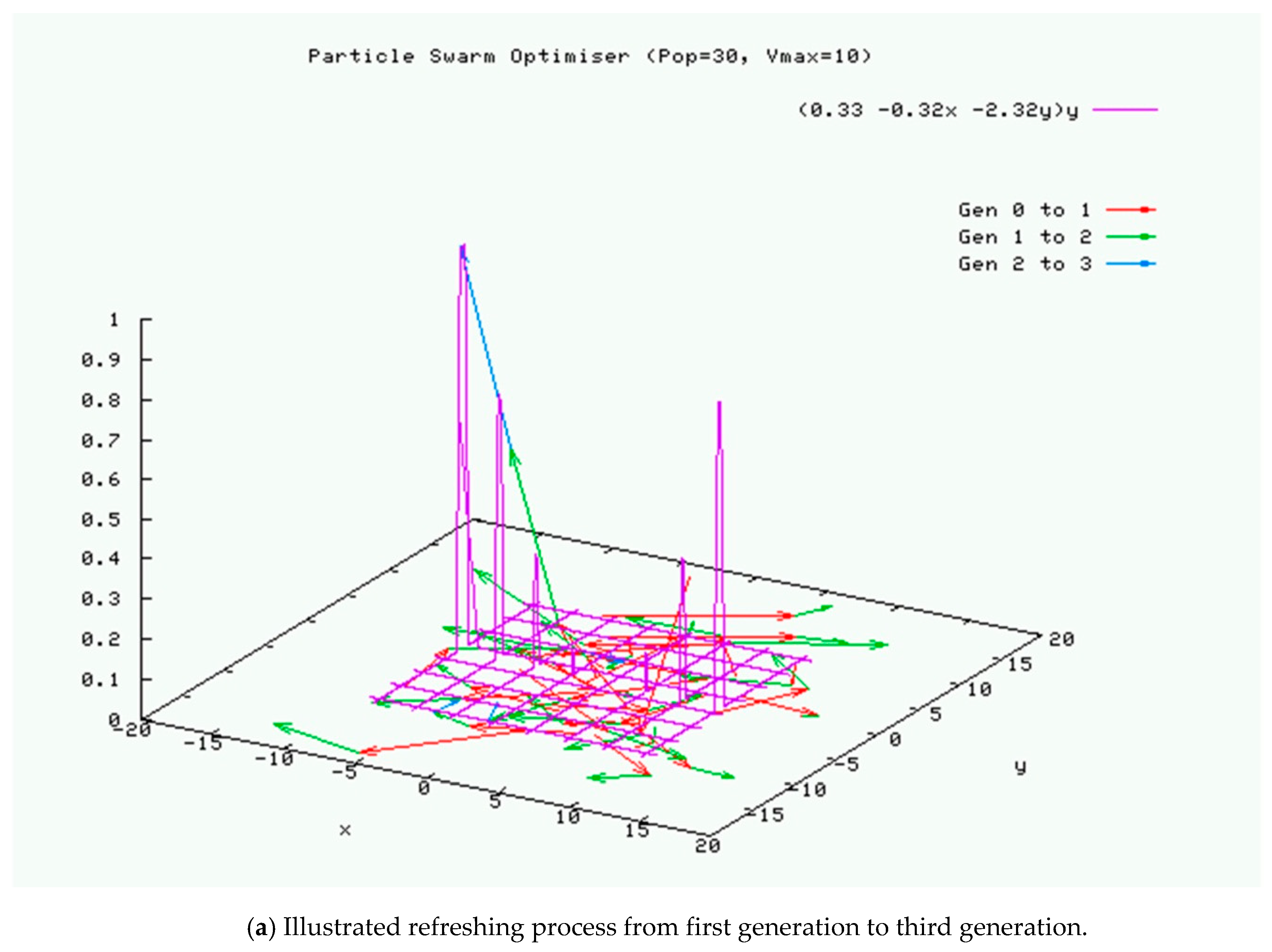
The particle swarm optimization originates from the emulation of the group dynamic behavior of animals. Each particle in a group, is not only affected by its individual behavior, but also by the overall group behavior, so individual and group particles have inter-relations with each other.
There are position and velocity vectors defined for each particle that must be defined first. The searching method combines the contribution of the individual particles with the contributions of the group.
For a particle as a point in a searching space with D-dimension [
11,
12,
13], the
i-th particle associated with the problem is defined as:
where
d = 1, 2, …,
D and
i = 1, 2, …, PS, PS is the population size.
The respective particle value and group value associated with each particle
are defined as:
The refreshing speed vector is defined as:
The refreshing process is formulated as follows with two random seed terms included:
where
.
When the searching process begins, the initial guess solution is set to begin the process. In the iteration process, the particle is updated by the values coming from both the group contribution and particle contributions. The convergence condition depends on the minimum of the average square error of the particle, and is terminated when the average square error is small.
Both the contribution of the individual particle and the contribution of the group are mixed together into the searching process. In the optimization problem, there might be local minimum problems. The optimal solution might jump into a local trap and be unable to jump out of the trap.
Since there are random seeds in the equation, the local optimal point has the chance to jump out of the local trap area and approach another global one.
An inertia weighting factor is considered in this algorithm to increase the convergence rate. An inertia weighting factor is added in the following expression:
Therefore, the speed vector modifying process can be rewritten as:
where the
and
are both constants,
is the initial weighting value,
is the final weighting value,
gen is the number of current generation,
is the number of final generation.
However, the abovementioned expression corresponds to a linear modification for the two random seed factors. To make the algorithm suitable for a non-linear search problem, there are many non-linear modification methods proposed to refresh the velocity vector. In this case a K factor is defined as follows:
By setting the learning factors
and
which are larger than 4.0, the modification for the speed vector is expressed as:
However, the modified term is quite complicated.
In the following, a modified PSO method called orthogonal PSO (OPSO) is proposed to simplify the formulation and improve the search process effectively.
A simpler orthogonal array in the Taguchi method is used in this algorithm to simplify the searching process.
5.3. Optimization Results of Cloud Model
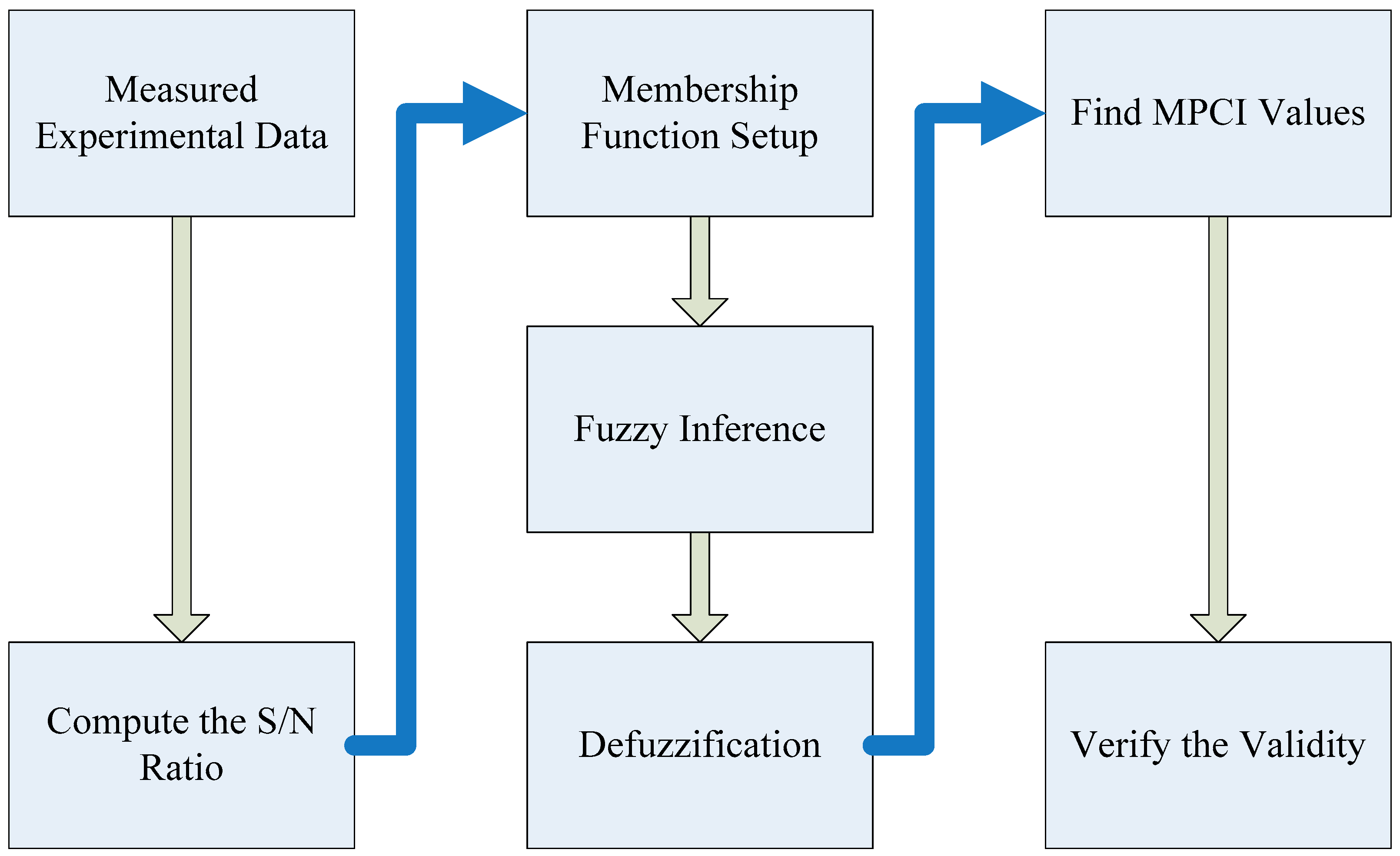
With the above formulation for the optimization problem, the optimal solutions for the reactive power and THD value are found at the same time by using MPCI method. The derived optimal solution can provide the optimal operating conditions for the vehicle-to-grid connected inverter.
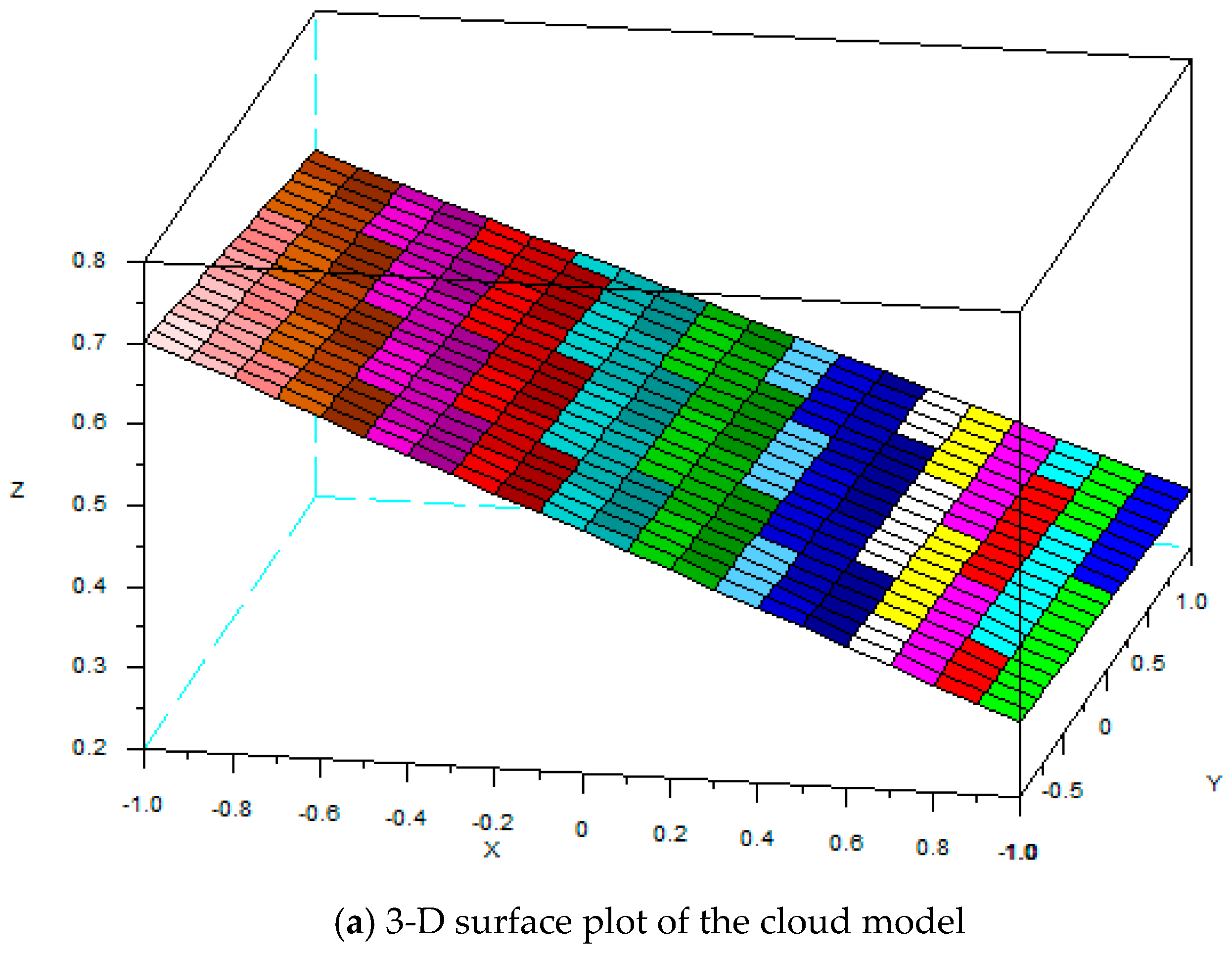
By using the response surface method with OPSO method, the mathematical cloud model for this problem is provided and verified. This is very helpful and useful to assess associated smart vehicle-to-grid applications.
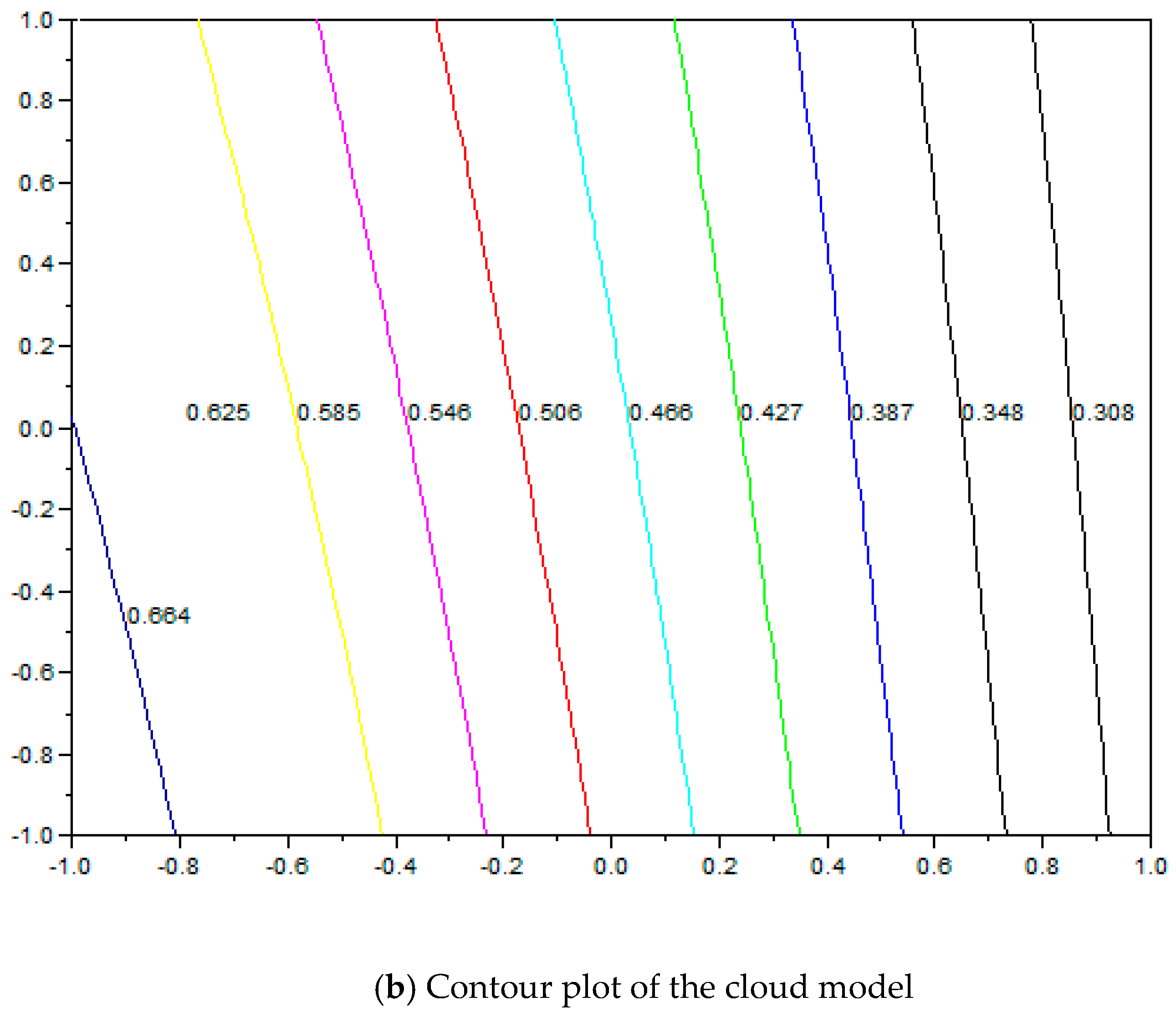
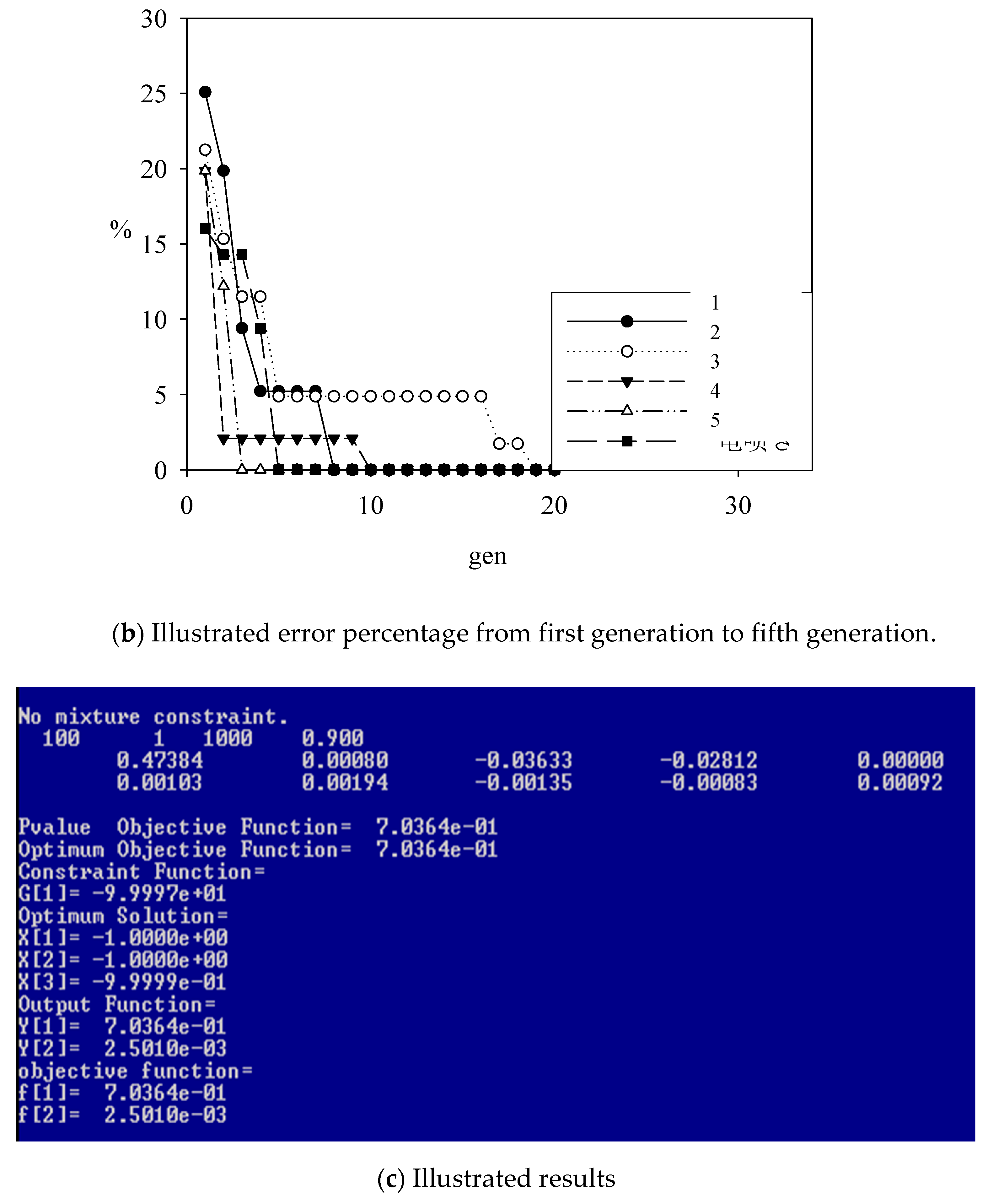
Instead of local solutions and optimal solution can be found and located at the end of the entire searching range. The results show that the proposed mathematical method has the capability of providing a better searching process and through the analysis of response surface method combined with OPSO process, the optimal solution is found.
The optimal solution is located at (, , ) = (−1.0, −1.0, −1.0). That is to say, the corresponding optimal parameters for the PID controller are: Kp 12,767, Ki 367 and Kd 1.0 × 10−5. The optimal solution is observed to correspond to the sixteenth experimental run in the combined array.
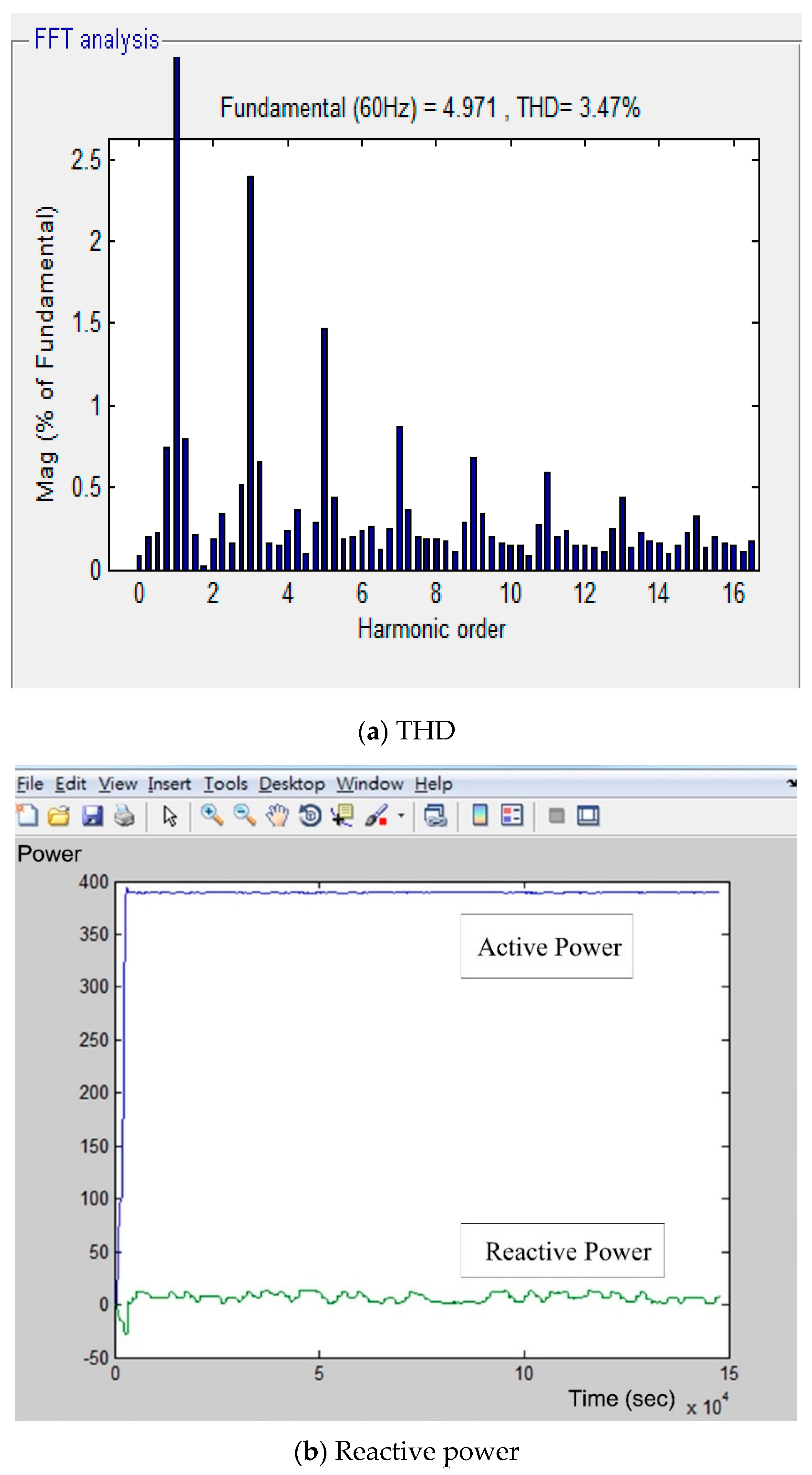
The experimental results show that the reactive power 5.94 Var, 6.94 Var and THD values 3.16%, 3.06% are the minimal values in the combined array.
The results show that there are optimal solutions located at the endpoints of the range [−1.0, 1.0]. The convergence rate is faster than in a conventional searching method. The related confirmation experiments show that the proposed methodology can provide good predictions with the practical experimental runs. It is proved that the proposed optimal parameter solution solved by the OPSO algorithm can minimize the reactive power and THD values for smart vehicle-to-grid problems.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}