1. Introduction
With the development of smart grids in power system construction, improving the real-time diagnosis and analysis of the equipment involved represents an urgent technical challenge. The reliability of power transformers, which are critical core equipment in power transmission and distribution systems, dictates the safe and reliable performance of the whole electrical system. Thus, timely discovery of early potential transformer faults is very important and condition monitoring, as well as fault detection, have gradually attracted more and more attention of both the domestic and foreign research communities [
1,
2,
3].
The composition, content, and proportion of dissolved gas in the oil of a power transformer are closely related to the fault type and fault degree of the transformer, which effectively reflect the operation state of a transformer. Dissolved gas analysis (DGA) is the most convenient and effective method available for early potential fault diagnosis of oil-immersed transformers because it is an accurate and reliable method to find potential faults inside a transformer of this type. The improved/new three-ratio (IEC three-ratio) and Dornerburg method are effective methods for oil-immersed transformer fault diagnosis, being easily implemented and widely used. These traditional DGA methods mainly use operational experience and expert knowledge to establish the diagnosis rules of "code-fault type" based on the ratio (or content) of dissolved gas and fault types, but these methods suffer some drawbacks in their engineering applications, such as their code boundaries being excessively absolute and faults not being completely covered by the defined codes [
4,
5].
With the development of artificial intelligence (AI), machine learning (ML), data mining (DM), and other theories and technologies, the data-driven intelligent model has been applied to transformer fault diagnosis. The use of the artificial neural network (ANN) [
6,
7], expert system, Bayes network, support vector machine (SVM) [
8,
9], random forest (RF), and other theories and methods have provided new ideas for transformer fault diagnosis. However, all AI diagnostic methods have some limitations. For example, ANN needs to be prevented from overfitting and is susceptible to local extrema, the completeness of an expert system knowledge base cannot be guaranteed, a Bayes network needs a large number of sample data, and matter-element theory has strict requirements on sample consistency and sample size.
The input parameters of AI fault diagnosis methods are mainly derived from the gas ratio or content of DGA methods recommended by the International Electrotechnical Commission (IEC) and Institute of Electrical and Electronics Engineers (IEEE), but some important features are neglected by the input parameters of these methods and the feature sets need to be improved. Normal and fault states of transformers cannot be distinguished by these methods, which limits their application in online monitoring and fault diagnosis. At the same time, in the actual work of operating and maintaining transformers, fault samples and data are difficult to collect and the types of fault are diverse, so it is difficult to assemble massive and complete fault samples. Meanwhile, the collected fault samples are often unbalanced, therefore, the application in practical work of AI diagnostic methods has been limited by these conditions.
SVM has a high generalization ability, no neural network overfitting, slow convergence, and can be easily affected by local extrema. Therefore, SVM is suitable for nonlinear, local minimum point, and small sample pattern recognition, and other practical problems. However, SVM is easily affected by unbalanced samples [
10,
11,
12]. To overcome this disadvantage, researchers have introduced many modification methods, and twin support vector machine (TWSVM) is the most commonly applied among them. TWSVM is used as the classifier to address the potential unbalanced sample issue associated with SVMs and to increase the SVM training speed. TWSVM can apply different penalty factors to the two categories of samples if the samples are not balanced.
In this study, we propose a transformer fault diagnosis model based on chemical reaction optimization and a TWSVM based on the status of the power industry and the characteristics of transformer fault diagnosis. A variety of DGA fault diagnosis feature parameters are fused as the input parameters of the model to solve the problems of too absolute coding boundary and incomplete coding coverage of faults. TWSVMs are used as classifiers for solving the problems of unbalanced and insufficient samples. The restricted Boltzmann machine (RBM) is used for data preprocessing to ensure the effective identification of feature parameters and improve the efficiency and accuracy of fault diagnosis. A chemical reaction optimization (CRO) algorithm is used to optimize TWSVM parameters (penalty factors and kernel parameter) to select the optimal training parameters. We used cross-validation (CV) to ensure the reliability and generalization ability of the diagnostic model. Finally, the validity of the model was verified using real fault samples and random testing.
The remainder of this paper is organized as follows:
Section 2 outlines related work on transformer fault diagnosis techniques.
Section 3 covers fundaments of CRO-TWSVM model. The transformer fault diagnosis model based on CRO-TWSVM is presented in
Section 4. Examples of the transformer fault diagnosis model are given in
Section 5. Finally, conclusions are drawn and potential future work is discussed is
Section 6.
2. Related Work
With the rapid development of computer technology and artificial intelligence (AI) theory, machine learning-based techniques and data-driven modeling methods, including artificial neural network (ANN) [
13,
14,
15,
16,
17], fuzzy theory [
18,
19], expert system (EPS) [
20], rough sets theory (RST) [
21], and other intelligent diagnosis methods [
22,
23,
24,
25,
26,
27,
28,
29,
30,
31] such as random forest (RF), gradient boosting decision tree (GBDT), deep belief network (DBN), support vector machine (SVM) and evidential reasoning approach, have been introduced to the research field of transformer fault diagnosis based on the DGA approach. These intelligent methods make up for the deficiencies of the mentioned traditional DGA methods, and directly or indirectly improve the accuracy of transformer fault diagnosis, and provide a new train of thought for high-precision transformer fault diagnosis.
Guardado et al [
15] demonstrate that IEC based BP neural network can acquire a higher accuracy rate than other DGA methods in fault detection. Yang et al [
16] proposed a multi-level BP neural network fault diagnosis model for transformer. Wang et al. [
17] present a novel method for power transformer fault diagnosis based on probability neural network (PNN) and dissolved gas analysis, they used a new hybrid evolutionary algorithm combined with a particle swarm optimization (PSO) algorithm and back propagation (BP) algorithm to optimize the parameters of PNN. Illias et al. [
7] proposed an improved hybrid modified evolutionary particle swarm optimizer (PSO) time varying acceleration coefficient-ANN for power transformer fault diagnosis. Rigatos et al [
23] proposed neural modeling and local statistical approach to fault diagnosis for the detection of incipient faults in power transformers, which can detect transformer failures at their early stages and consequently can avoid critical conditions for the power grid, furthermore, the random forest technique-based fault discrimination scheme [
25] for fault diagnosis of power transformers, as well as the multi-layer perceptron (MLP) neural network-based decision [
30], and have been proposed consecutively. The authors of [
18] proposed a deep belief network (DBN) approach to predict transformer concentrations. They achieved good prediction accuracy, but their method ignores the relationship between the individual gas components.
Through the optimization of different ANN approaches, the above methods to some extent solve the problems that the neural network is easy to overfit, has slow convergence speed, easily gets into local minima, and achieve good results, but the premise is the availability of a large number of samples as support. In the same way, other ML methods, such as RF, DBN also need a large number of samples. However, in the actual work of transformer operation and maintenance, fault samples and data are difficult to collect and the types of fault are diverse, so it is difficult to form massive and complete fault samples.
SVM, proposed by Vapnik, is a machine learning method developed from statistical theory. SVM adopts the principle of structural risk minimization and is suitable for training and classification of small samples. The authors of [
32,
33,
34,
35,
36,
37,
38] proposed support vector machine (SVM)-based intelligent fault classification approaches for power transformer DGA. Zhang et al. [
37] developed a useful approach combing the wavelet technique with a least squares support vector machine (LS-SVM) based on particle swarm optimization (PSO) with mutation for forecasting of dissolved in the power transformer. There are also many research efforts focusing on fault detection for another equipment and systems. Li et al. [
38] presented an intelligent method for the fault diagnosis of power transformers based on selected gas ratios and SVM. They used a genetic algorithm (GA) to obtain the optimal dissolved gas ratios (ODGR) which is used for the DGA ratio selection and SVM parameters optimization. Liu et al. [
35] presented a fault classification approach for power transformer using DGA and SVM algorithm. They used training data to build a multi-layer SVM classifier. Such a classifier has a good performance in identifying the transformer fault types.
The mentioned intelligent approaches have improved the conventional DGA-based transformer fault diagnosis methods, and directly or indirectly improved the accuracy of fault diagnosis for the power transformers. However, these studies tend to focus on model selection and optimization, and the problem of unbalanced samples in the case of small samples is not well solved. Meanwhile, there are deficiencies in the training methods and data preprocessing methods. These problems limit the practical application of AI algorithm or model in transformer fault diagnosis. Therefore, in this paper, the CRO-TWSVM model is proposed to solve these problems.
3. Fundaments of CRO-TWSVM Model
3.1. Restricted Boltzmann Machine
In 1986, on the basis of the Boltzmann machine, Smolensky proposed a stochastic neural network model named Restricted Boltzmann Machines (RBM) [
39]. An RBM network is composed of a hidden layer and a visible layer. The visible layer is composed of visible units, which can be used to receive the input of transformer characteristic parameters, and the hidden layer is composed of hidden units, which can be used to extract the deep feature vectors. The units on the same layer are not connected, and the units on different layers are connected to each other.
The state of each RBM unit is random, and 1 or 0 is used to indicate whether the unit is active or not, and the state is determined by energy probability statistics method.
Suppose RBM has
n visible units and
m hidden units, and the bias weights of visible layer are defined as
a = {
a1,
a2,…,
an}, the bias weight of hidden layer are defined as
b = {
b1,
b2,…,
bm}, the weights of connection between hidden units and visible units are defined as
ω = {
w11,
w12,…,
wnm}, then the RBM’s parameters can be defined as
θ = {
ω,
a,
b}. Given these, the energy of a configuration of RBM is defined as:
where:
νi is the state of the
i-th visible unit,
ai is the bias weight of
i-th visible unit,
ν = {
ν1,
ν2,…,
νn} is the state of the visible layer,
hj is the state of
j-th hidden unit,
biis the bias weight of
j-th hidden unit,
h = {
h1,
h2,…,
hm} is the state of hidden layer,
wij is the weight of connection between the
i-th visible unit and the
j-th hidden unit.
The activated probability of
i-th visible unit and the
j-th hidden unit can be obtained by the following equation:
where:
and the probability that RBM in the state of (
ν,h) can be obtained by the following equation:
Suppose the total number of training samples is
Q, the
i-th sample can be defined as
. The likelihood function of Equation (5) can be maximized through training, and the parameters of RBM
θ = {
ω,
a,
b} can be obtained.
By using the Contrastive Divergence (CD) algorithm proposed by Hindon, the parameters of RBM can be described as Equation (6):
where, [□]
data is the expected value of the given data, [□]
recon is the mathematical expectation of the reconstructed model,
ε is the learning rate for the parameters of the RBM.
Studies have shown that RBM can improve the recognition accuracy and training speed of classification model through data preprocessing and the RBM preprocessing method proposed for Finger Motion Estimation by Mousas [
40] works well.
Based on the aforementioned process, RBM is used to preprocess the transformer diagnosis features. The DGA parameters of transformer are set as the input elements of visible layer, the hidden layer stands for a non-linear transformed feature space, and the hidden layer’s units, as a hyper-parameter, define the dimensionality of the new feature space. Finally, the output vector preprocessed by RBM is used as the input of the TWSVM in the following section.
3.2. Twin Support Vector Machine
SVM, proposed by Vapnik, is a machine learning method developed from statistical theory. SVM adopts the principle of structural risk minimization to classify data by constructing the optimal hyperplane. It can effectively solve small sample, non-linear, and high dimension classification problems, and has the advantages of fast calculation speed and strong generalization ability, so it has been widely examined and applied [
9,
33,
34].
Given a set of data
, where
Xi ∈
Rn denotes the input vectors,
yi ∈ {+1,–1} is two classes of output, and
m is the sample number. The sample set can be constructed into the following classification planes:
where
ω denotes the weight vector and
b denotes the bias term.
ω and
b are used to define the position of the separating hyperplane.
The problem of seeking the optimal classification hyperplane can be transformed into a constrained quadratic optimization problem by comprehensively considering structural risk minimization criteria, regularization terms, and fitting errors. The optimal hyperplane separating the data can be obtained by the following equation:
where C is the penalty factor and
is the slack factor. Positive slack variables
are introduced to measure the distance between the margin and the vectors
xi that lie on the wrong side of the margin. The Lagrange coefficient method is used. By introducing the Lagrangian multiplier
αi, the optimal hyperplane is:
SVM can also be used in nonlinear classification by using the kernel function. Using the nonlinear mapping function
, the original data
x are mapped into a high-dimensional feature space, where the linear classification is possible. Then, the nonlinear decision function is:
where
is the kernel function,
.
TWSVMs generate two unparalleled classification hyperplanes by converting one quadratic programming problem (QPP) of a classical SVM into two QPPs, but of a smaller size.
The basic idea of TWSVM is to construct two unparalleled hyperplanes in an
n-dimension space:
Each hyperplane occurs such that the samples are as close as possible to the category to which they belong and as far as possible from the categories to which other samples belong. The TWSVM solves the following two quadratic optimization problems:
where
K represents the kernel function;
A and
B represent
positive category samples and
negative category samples, respectively;
and
are unit vectors with the same number of dimensions with kernel function
and
, respectively;
and
are penalty factors;
and
are the normal vector and the offset of the optimum hyperplane, respectively; and
q is the slack factor.
Each of the hyperplanes corresponds to a sample category. The category of a sample depends on the distance between the sample and the hyperplane, with the decision function being:
For a binary classification problem, the space complexity of a standard SVM is O(
m3), where
m is the number of samples. Supposing each category contains
m/2 samples, the space complexity would be
if two QPPs are considered. Thus, TWSVM has a space complexity 1/4 that of SVM. With the two penalty factors
c1 and
c2 built into TWSVM, it is also possible to apply different penalty factors to the two categories of samples to solve the classification accuracy concern typical of a classical SVM arising from unbalanced samples [
10,
11]. TWSVM is employed as the classifier to address the potential unbalanced sample trouble associated with SVMs and to increase the SVM training speed.
3.3. Multi-Category Classification Algorithm
A standard SVM is a binary classifier. For multi-category classification problems, a combinational multi- category classification SVM is generally used; the problem is decomposed and reconstructed into multiple binary classification problems, which are then solved one-by-one.
Among commonly used multi-category classification algorithms are one vs. one, one vs. many, decision directed acyclic graph (DAG), and binary tree algorithms. A binary tree algorithm has the following benefits: (1) ability to fuse with a classification model of interest; (2) for k-category classification problems, only k-1 binary classifiers are needed, which is the least among the aforementioned algorithms and thus the least computation-intensive; (3) the samples required decrease from layer to layer, resulting in a quicker and more efficient training for a given number of layers; and (4) there are no inseparable zones [
33,
34,
35]. We selected the binary tree algorithm to construct a hierarchical TWSVM decision model.
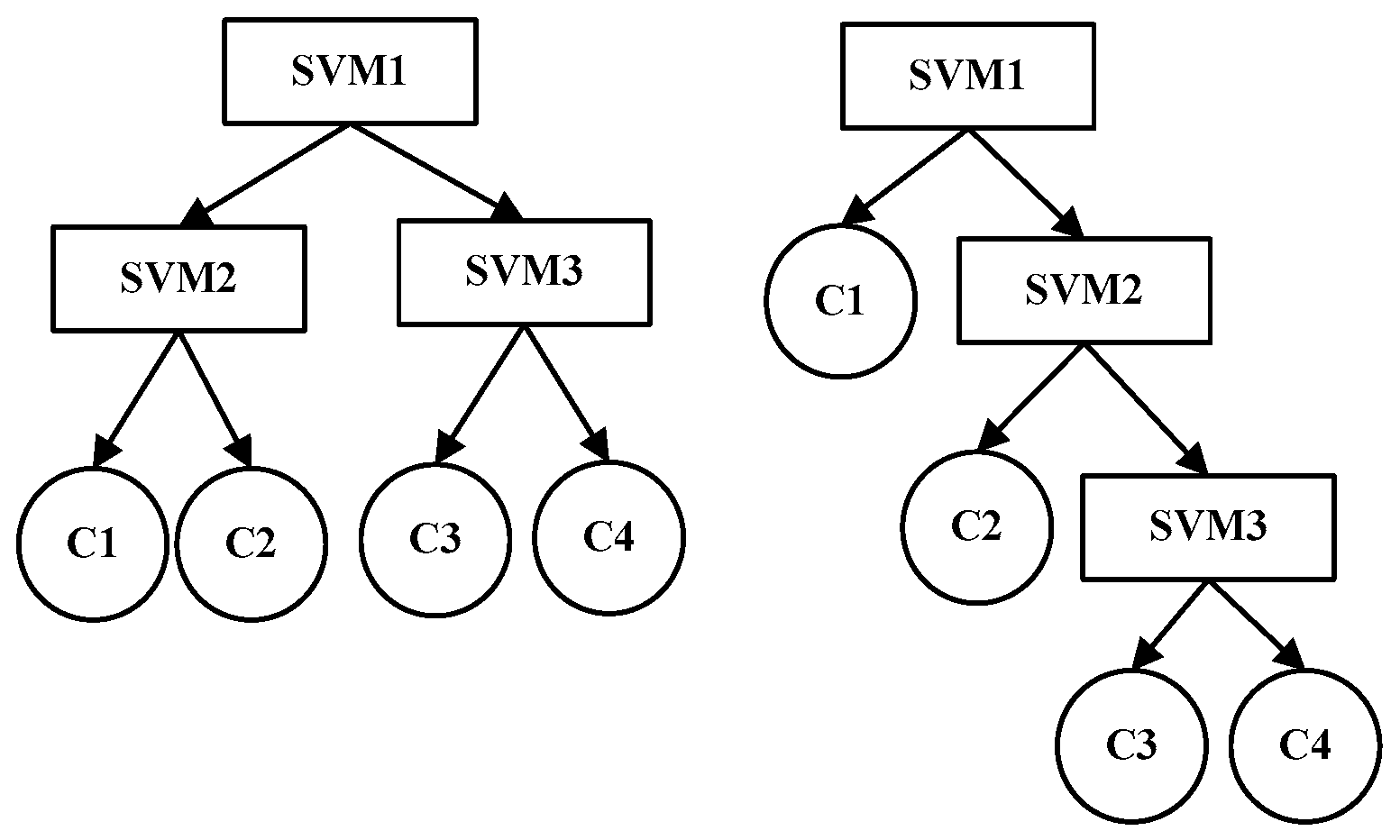
As shown in
Figure 1, a classification problem is either a complete or a partial binary tree classification problem. The left figure illustrates a complete binary tree SVM (BT-SVM), wherein each decision node divides its categories into two sub-categories of equal size; the right figure shows a PBT-SVM, wherein each decision node singles out a category from the rest.
3.4. Chemical Reaction Optimization Algorithm
Chemical reaction optimization (CRO) is a metaheuristic algorithm having just emerged in recent years. It is a swarm intelligent algorithm implemented by simulating the molecular movement and energy conversion process in a chemical reaction. It is known that the molecular state in a container is unstable at the beginning of reaction due to excessive energy in the molecules, and the molecules are transferred to the lowest possible energy state through processes facilitated by intermolecular collisions and post-collision chemical reaction in order to achieve a stable state. The ultimate outcome of a chemical reaction is the reaction products, which are formed in a process characterized by a diminishing reaction potential energy. It means that the CRO is an optimization process in which the potential energy of the search system is minimized [
41,
42,
43,
44,
45,
46].
Over the past recent years, metaheuristic algorithms have found extensive applications in various domains and have evolved into GA, particle swarm optimization, ant colony algorithms, etc. Relative to other swarm intelligent algorithms, CRO is good at finding a global solution and producing a shorter optimization time, and thereby, it provides a new idea for solving an optimization problem.
The basic operation units involved in CRO algorithm are composed of molecules (ω) and container walls (buffer), where the molecules possess both potential energy (PE) and kinetic energy (KE) whereas the container walls create the environment in which the reaction occurs. The molecular PE is the ultimate criterion for evaluating a chemical reaction and thus becomes the objective function of the question of interest while the KE is a quantized value for determining whether the system is able to initiate a molecular reaction. In a chemical reaction, there are four basic reaction operators: monomolecular collision, monomolecular decomposition, intermolecular collision, and molecule synthesis. The following paragraphs provide a brief description of the four basic reaction operators [
47].
(1) Monomolecular collision
Monomolecular collision is a process in which the KE and PE of a molecule change due to the collision between the wall and the molecule. The energy change occurring in a molecular collision reaction process may be described by Equation (14):
where,
ω is the original molecule, ω’ is the new molecule after structural change,
is a random number,
is the upper limit (in percentage) of monomolecular collision loss rate, being a constant, and
is molecular potential energy, with
being the objective function of the problem considered. Monomolecular collision enables local searching in the problem space.
(2) Monomolecular decomposition
Monomolecular decomposition is a reaction occurring when a molecule with higher KE collides with the wall and during which the molecule decomposes or breaks up into two new molecules. The energy difference
Edec existing before and after collision is transmitted to the two new molecules in a random manner; such energy change in this reaction process may be expressed by Equation (15):
where
,
are of uniform distribution in [0, 1] and
is a random value in [0, 1]. Compared to monomolecular collision, monomolecular decomposition is capable of local search in a larger scope.
(3) Intermolecular collision
Intermolecular collision refers to a process in which two new molecules are produced after collision, and energy exchange, between two molecules, while involving no synthesis of molecules. A new molecule may be taken from the original molecular domain and, due to the absence of a collision with the wall, no energy is lost, hence the total energy does not change after the reaction. The two new molecules have a total KE of
Einter, which is distributed among them randomly; the energy change in this reaction process may be described using Equation (16):
where
is a random value in the range of [0, 1].
(4) Molecule synthesis
Molecule synthesis refers to the phenomenon where a new molecule is produced after the collision of two molecules. As with intermolecular collision, it is a process involving no wall collision and so the energy remains constant before and after collision. The energy change in this reaction may be described by Equation (17):
Molecule synthesis reactions greatly augment the molecule diversity and the synthesized new molecules differ appreciably from their predecessors and typically possess higher molecular PE. Molecule synthesis reaction improves molecular search power in new regions, hence enhancing CRO’s global search performance.
3.5. CRO-TWSVM Modeling Method
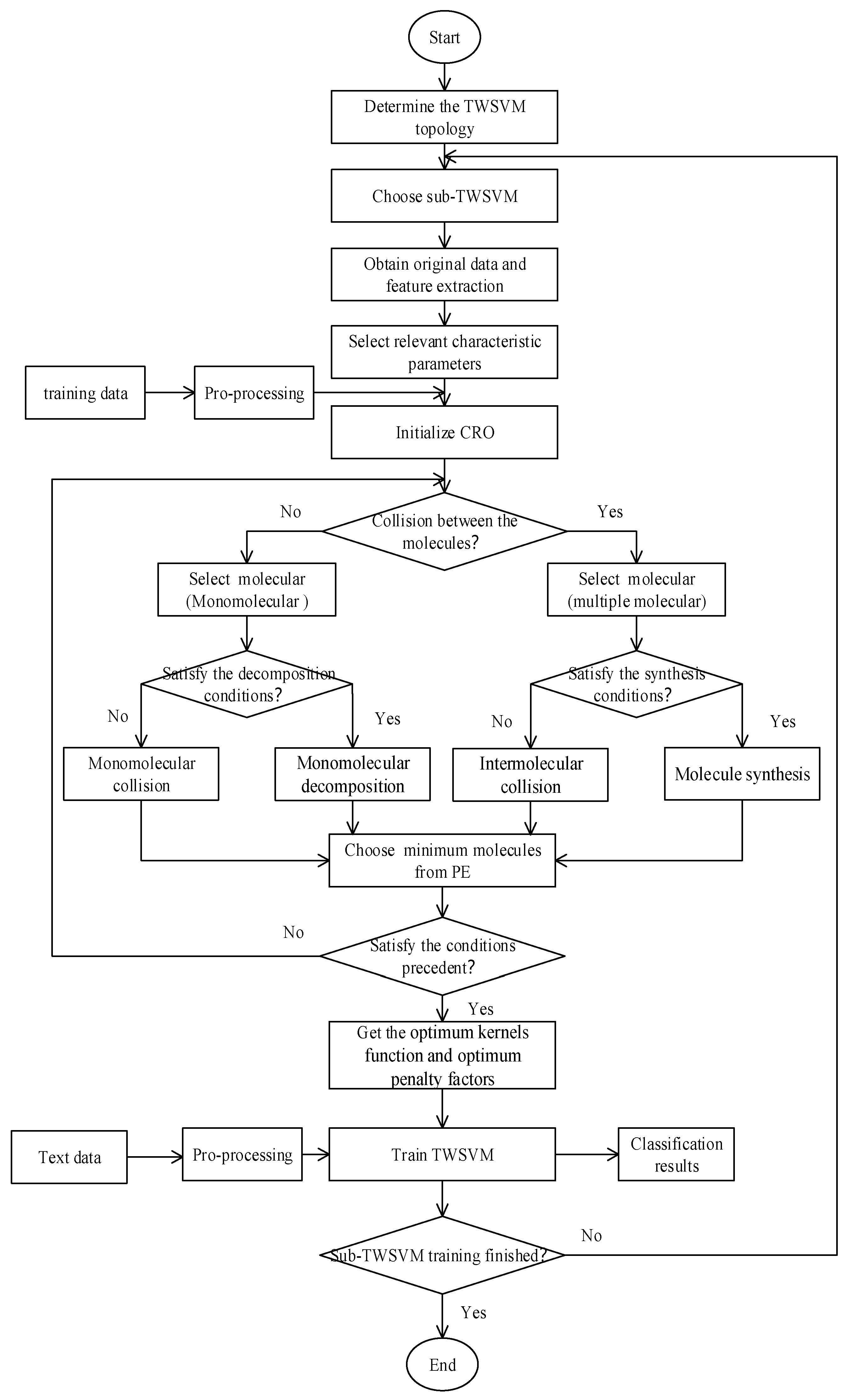
CRO-TWSVM model uses the CRO algorithm to optimize TWSVM’s penalty factors and kernel widths, arriving at the optimum penalty factors and kernel widths through iterative optimization involving the four reaction operators. A globally optimum SVM fault diagnosis model is then generated following training using the training sample. The actual procedures are illustrated below, where
Figure 2 is depicts the flow chart of CRO-TWSVM modeling.
3.5.1. Pre-Processing
The original DGA samples were normalized to avoid the difference in the order of magnitude of the values of the input parameters. The contents of dissolved gas were converted into the relative content within the range of [0,1], which is conducive to reducing the mutual exclusion between gases. The normalization treatment is described in Equation (18):
The RBM method was used to preprocess the input vector of TWSVM and the feature space was transformed into an appropriate representation, which is conducive to the machine learning of the TWSVM classifier. After being processed by RBM, the transformer fault sample set can be described as a feature set {(y1,l1),(y2,l2),…,(yn,ly)}, where yi ∈ Rd is the characteristic output of the i-th transformer fault sample, d is the characteristic dimension, n is the number of training samples, represents the output target (I = 1, 2..., N).
3.5.2. Set the Objective Function
We set the objective function along with the initial values of parameters c1, c2 and q with regard to the actual problem. Cross-validation is used to eliminate the training bias caused by randomness and evaluate the performance of the training model and improve the stability and generalization ability of the model.
The average classification accuracy of k-fold cross-validation is taken as the object function f to minimize the error of the trained TWSVM model. Considering the sample size and training efficiency, a five-fold cross-validation method was adopted:
where
li is the number of samples in the
i-th verification set, and
is the number of samples correctly classified in the verification set.
3.5.3. Initialize the CRO Algorithm
In this step, the following quantities are determined: the initial number of molecules in the container (PopSize), the upper limit (in percentage) of KE loss due to wall-collision reaction (), the factor determining the type of molecular reaction (MoleColl), the factor determining the type of monomolecular reaction (α), the factor determining the type of multimolecular reaction (β), and the maximum number of iterations (Iteration).
3.5.4. Compute the Initial PE and KE of Molecules
The initial PE of each molecule is estimated using Equation (11) and the initial value of molecular KE is taken as the initial KE.
3.5.5. Iteration and Optimization
In this step, iterative optimization of the molecules in the container is performed using the four basic reaction operators, with each iteration involving only one basic operator. An iteration operation is composed of three judgment processes, during which the reaction type, the monomolecular reaction type, and the intermolecular reaction type are determined. A judgment is determined based on the random number; if t > MoleColl, then no intermolecular reaction exists and the reaction is instead monomolecular, or vice versa. In the case of a monomolecular reaction, if NumHit–MinHit > α, then proceed with monomolecular decomposition reaction; otherwise, the reaction is monomolecular, where NumHit is the number of collisions, and MinHit is the minimum number of collisions. In the case of a multimolecular reaction, if KE < β, then proceed with molecule synthesis reaction, otherwise proceed with intermolecular collision reaction.
3.5.6. End the Algorithm
If the molecular behavior is such that the algorithm may be ended, then end the optimization process.
3.5.7. Train the Diagnosis Model
The molecule with the minimum PE corresponds to the global optimum solution, which is associated with the kernel width and penalty factor of the optimized TWSVM. The width and factor values are then assigned to TWSVM, which is trained using the training sample to produce the transformer fault diagnosis model.
3.5.8. Testing
Finally, the model is tested for accuracy.
4. A Transformer Fault Diagnosis Model Based on CRO-TWSVM
4.1. Choice of Parameters
The fault diagnosis model parameters are derived from the input characteristic values of the fault diagnosis methods recommended by IEC and IEEE, which are mainly divided into two categories: the input parameters of the IEC method, Roger method (RRM), and Doernenburg method (DRM) are gas ratios; and the input parameters of the key gas method (KGM), David triangle method (DTM) are gas contents.
The feature parameters in the above methods are extracted and repeated features are removed. C
2H
2/C
2H
4 and CH
4/H
2 ratios provide a good discriminating power with respect to thermal faults and discharge faults; C
2H
4/C
2H
6 and C
2H
4/CH
4 ratios perform well in distinguishing between low-, medium-, and high-temperature thermal faults; C
2H
2/C
2H
4 and C
2H
4/C
2H
6 ratios are suitable for distinguishing between medium- temperature and high-temperature thermal faults. C
2H
2/C
2H
4 and C
2H
4/C
2H
6 ratios are good indicators to distinguish partial-, low-, and high-temperature discharge faults [
4,
17,
22,
48,
49,
50].
The contents of H
2 and C
2H
2 were added to the model as input parameters to judge the normal or abnormal state of the transformer. The content of C
2H
2, as a percentage of the total hydrocarbon, is an important indicator used to determine the degree of discharge and over-heating in the oil; therefore, the ratio of C
2H
2/TCG (total combustible gas) was included. Finally, combined with the advantages of feature parameter identification of various fault diagnosis methods, a DGA fusion analysis model was established as the input parameter of the support vector machine, as shown in
Table 1.
4.2. Model Construction
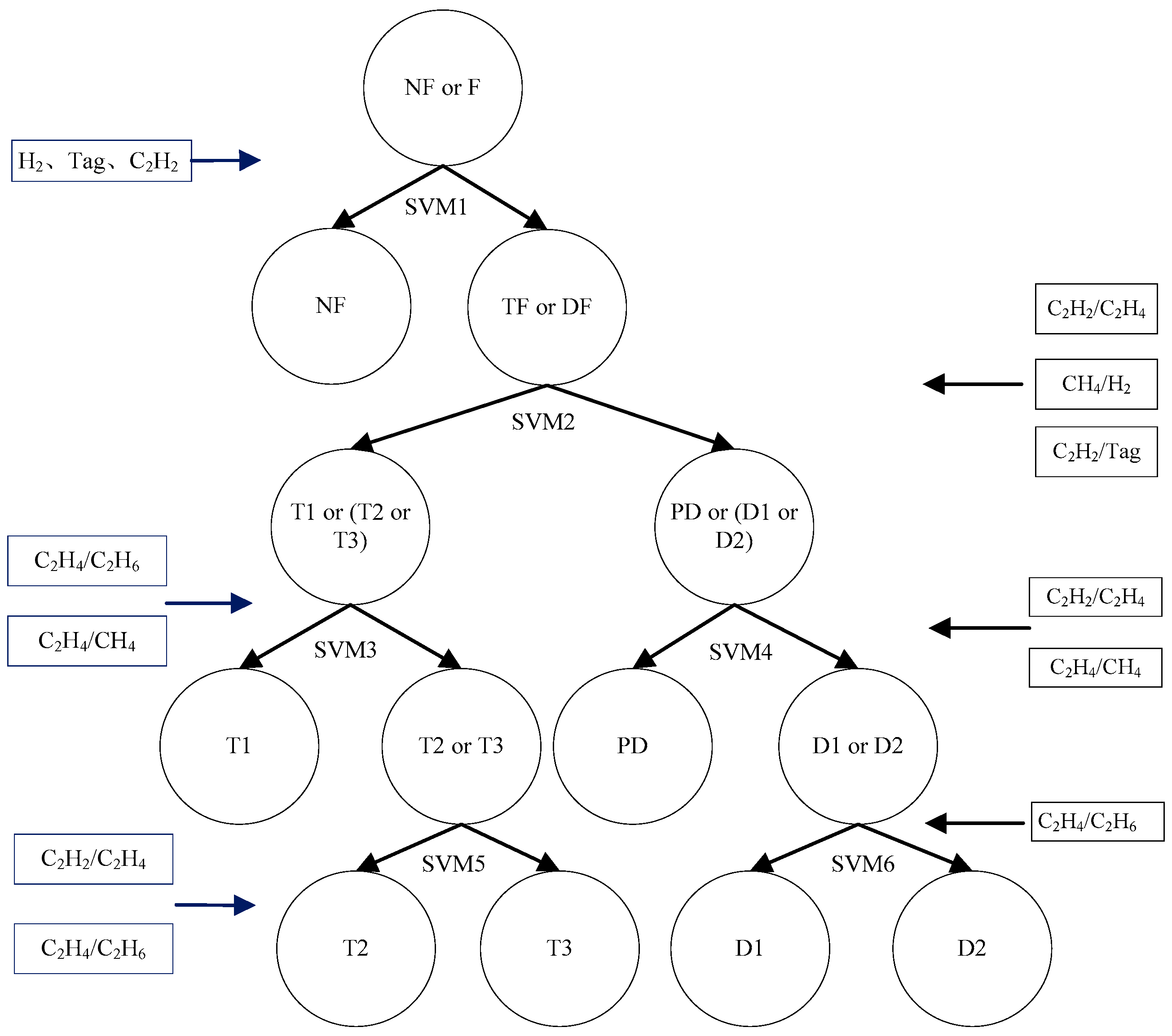
The transformer fault diagnosis model based on CRO-TWSVM is composed of TWSVMs, the fusion DGA parameters, and multiple classification structures of a partial binary tree (PBT), as shown in
Figure 3.
Seven fault modes are identified if the normal state is included: normal NF, low overheat T1 (below 300℃), medium overheat T2 (300–700℃), high overheat T3 (over 700℃), partial discharge (PD), low-energy discharge (D1), and high-energy discharge (D2).
The model includes a total of six sub-classifiers. To improve training and diagnosis efficiencies, the input of each sub-classifier contains characteristic parameters that are most effective for identifying the faults for which the sub-classifier is designed.
In this model, six TWSVMs, eight characteristic parameters, and four layers of fault samples classification were established to identify seven patterns. In the first layer, TWSVM1 is used as a classifier to classify the samples into a normal sample (NF) and fault sample (TF and DF). In the second layer, TWSVM2 is used as a classifier to classify samples into discharge fault (DF) and overheat fault (TF). In the third layer, TWSVM3 and TWSVM4 are used. TWSVM3 is used to classify T1, T2, and T3; and TWSVM4 is used to classify PD, D1, and D2. TWSVM5 and SVM6 are used in the fourth layer for further fault classification. TWSVM5 is used as a classifier to classify the samples T2 and T3, TWSVM6 is used as a classifier to classify the samples D1 and D2.

 ,
, 



{kind=link}
{kind=link}
{kind=link}