Sliding Mode-Based Robust Control for Piezoelectric Actuators with Inverse Dynamics Estimation


Abstract
:1. Introduction
2. Materials and Methods
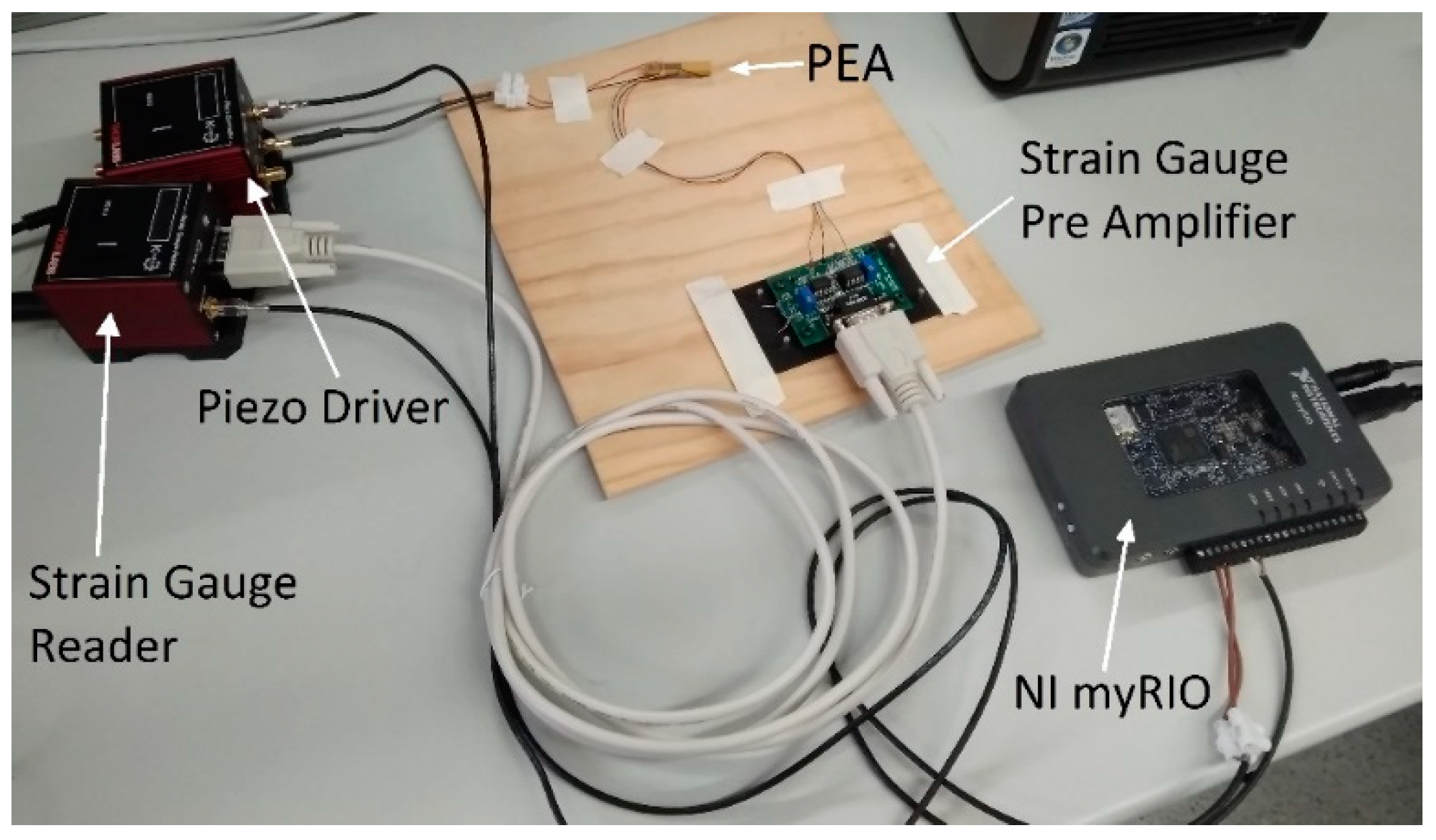
2.1. Experimental Setup
2.2. Dynamic Modelling
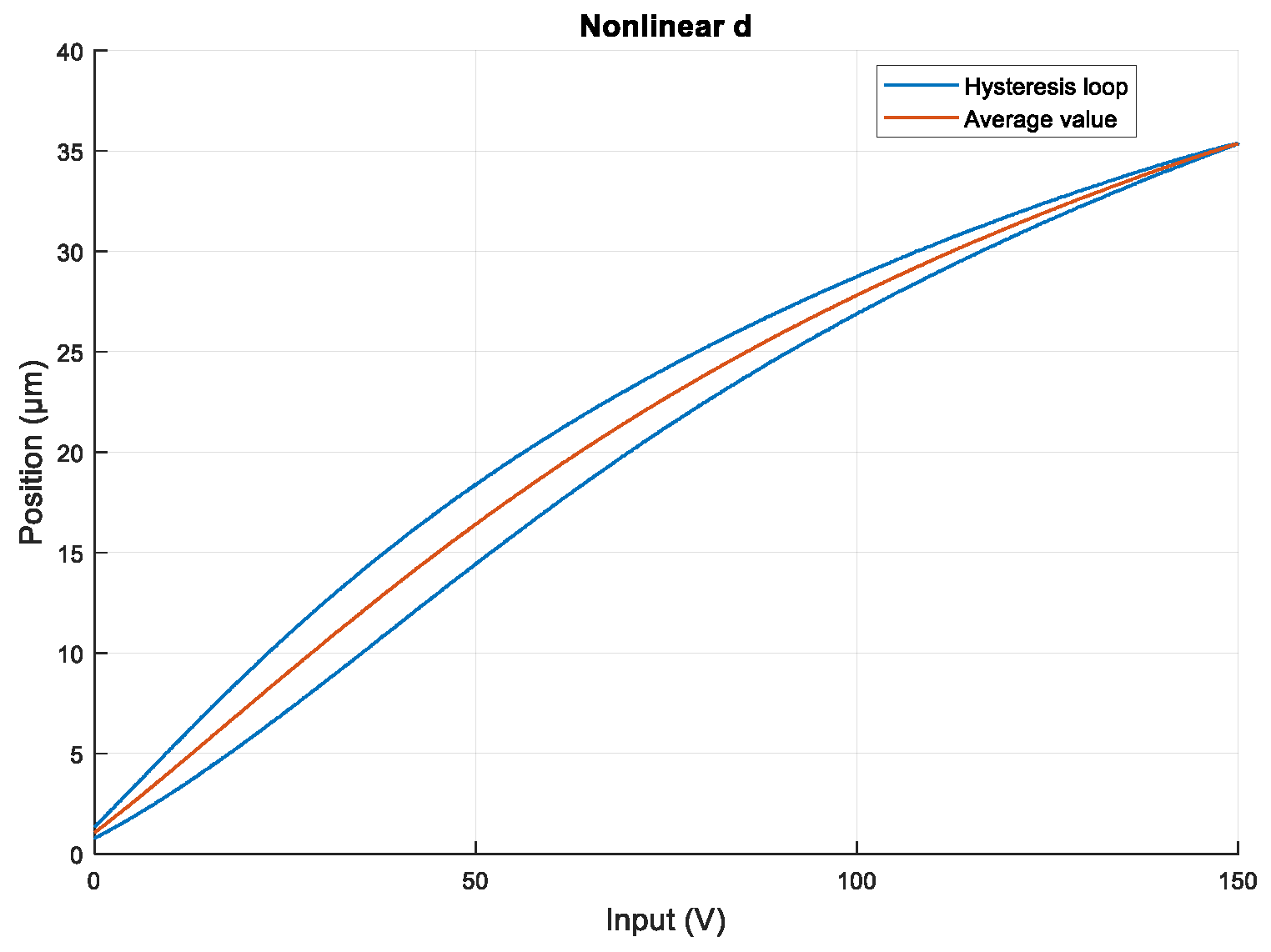
2.2.1. Voltage–Displacement Curve
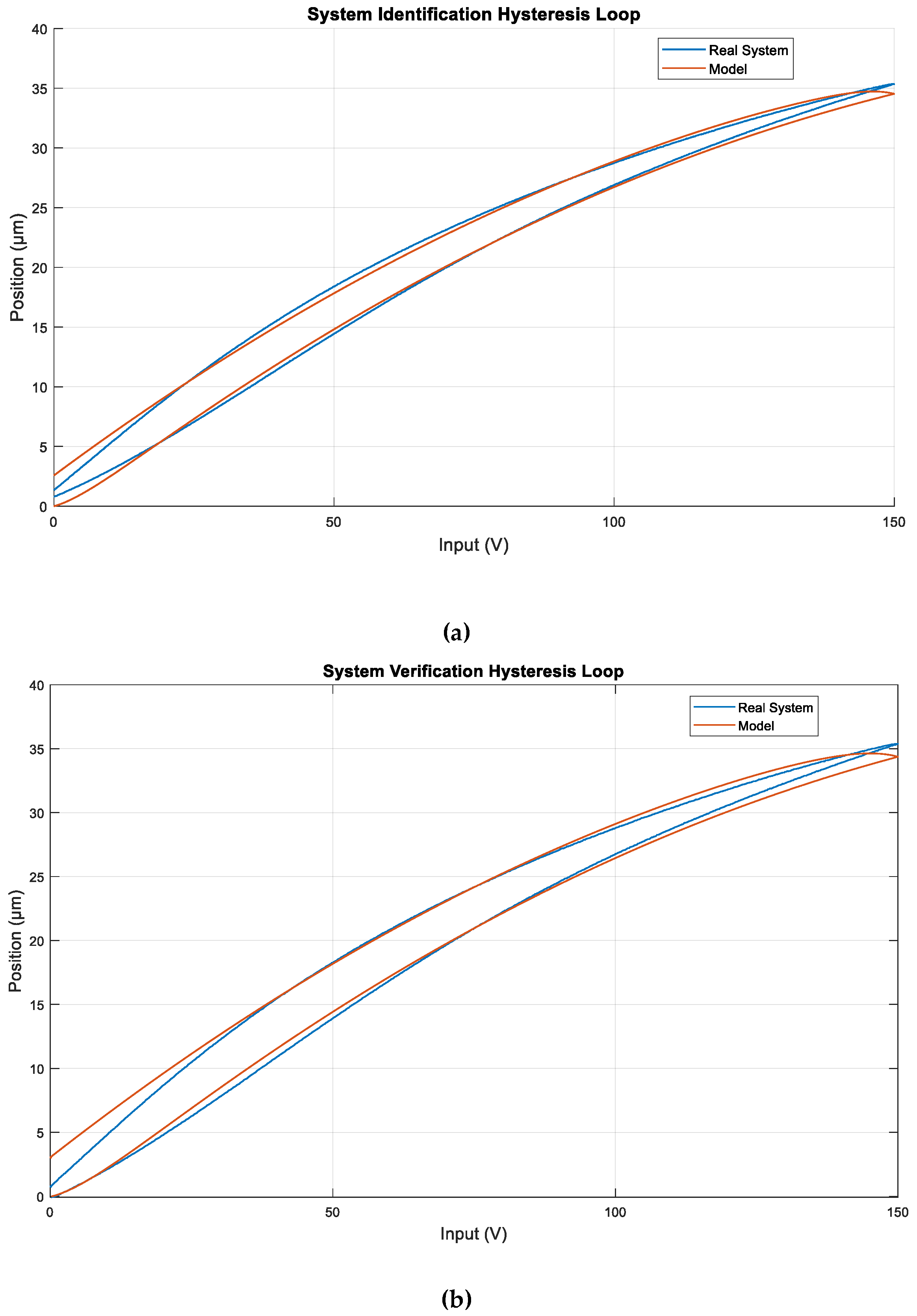
2.2.2. Model Identification with Parameter Estimation Toolbox for Matlab
- The experimental data for the model identification was obtained using three different input signals: Full-range (0–150 V) ramp, sinusoidal, and varying frequency sinusoidal signals, which will be described in Section 2.2.3.
- A dynamic model for simulating the PEA, which includes Bouc–Wen hysteresis, was implemented in Matlab/Simulink.
- The parameters were estimated for the simulation results to match the experimental data.
- Additional experimental data, also described in Section 2.2.3, was used for the verification of the model.
2.2.3. Signal Description
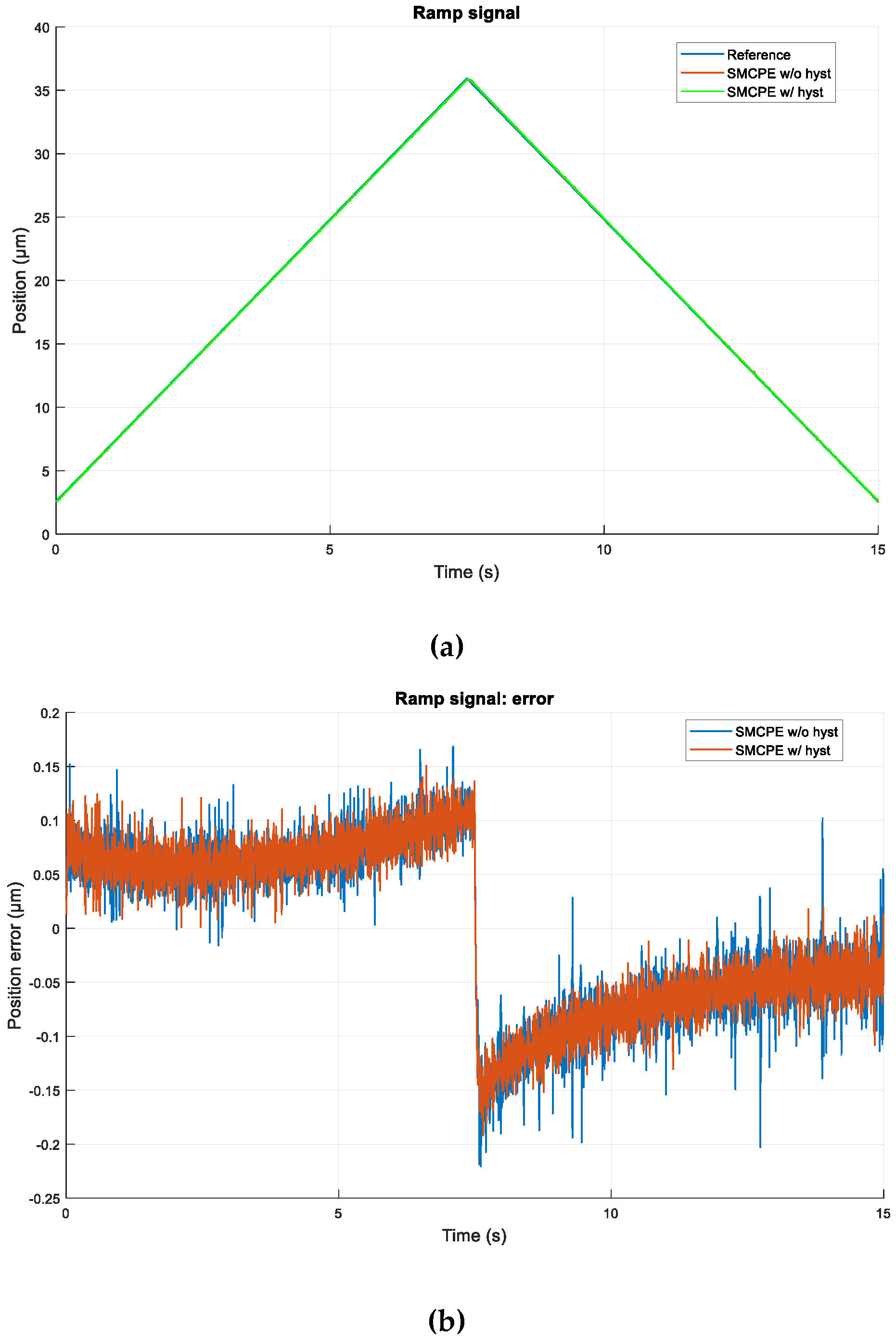
- The ramp signal for identification went from 0 to 150 V with a 20 V/s constant growth, and then back to 0 V with the same speed. For verification, it went from 0 to 150 V with a 40 V/s constant growth, then back to 0 V, back to 150 V, and finally back to 0 V, all with the same speed.
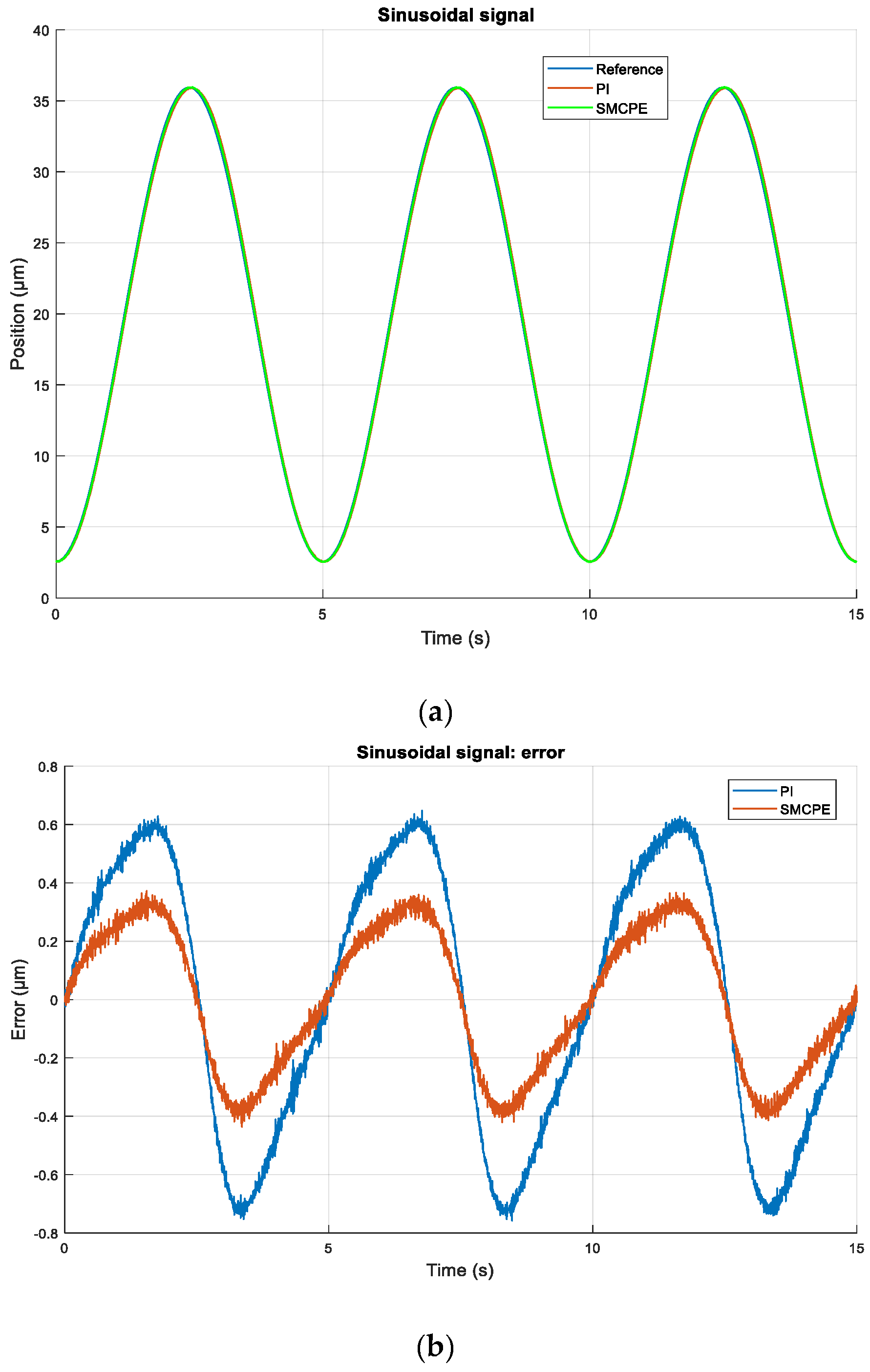
- The sinusoidal signal had a 75 V amplitude, 75 V offset, 0.2 Hz frequency, and −π/2 rad phase. For verification, it was the same signal but with a 0.4 Hz frequency.
- The varying frequency sinusoidal signal had 75 V amplitude, 75 V offset, −π/2 rad phase, and a frequency that went from 0.2 Hz and increased by 0.2 Hz after each cycle. No varying frequency sinusoidal signal was used for verification, since the identification data already covered a wide spectrum of frequencies.
2.3. Controller Design
2.3.1. Conventional SMCPE
2.3.2. Improved SMCPE
3. Experimental Results
3.1. Comparison of the SMCPE with and without Hysteresis
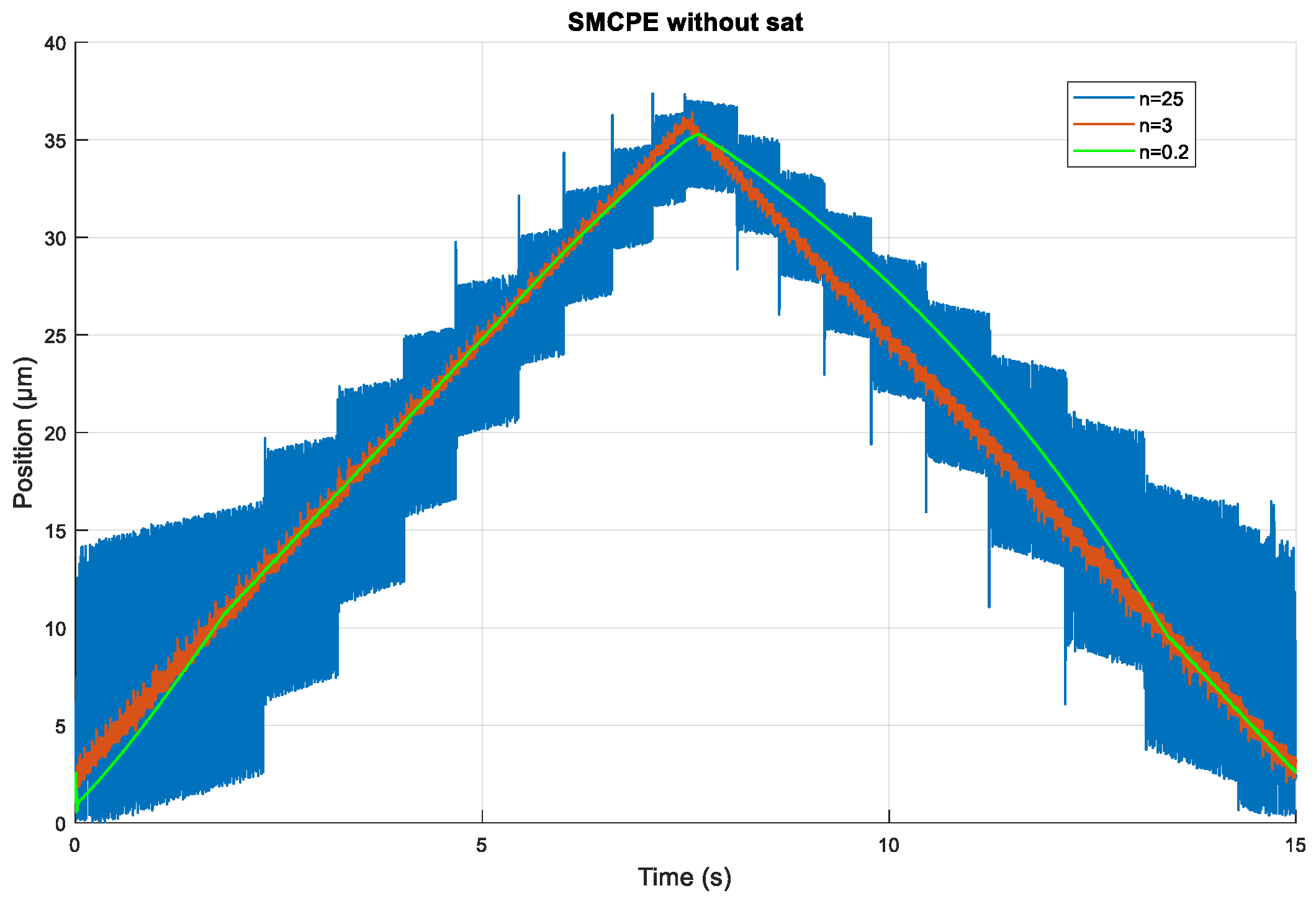
3.2. Comparison of the SMCPE with and without the Saturation Function
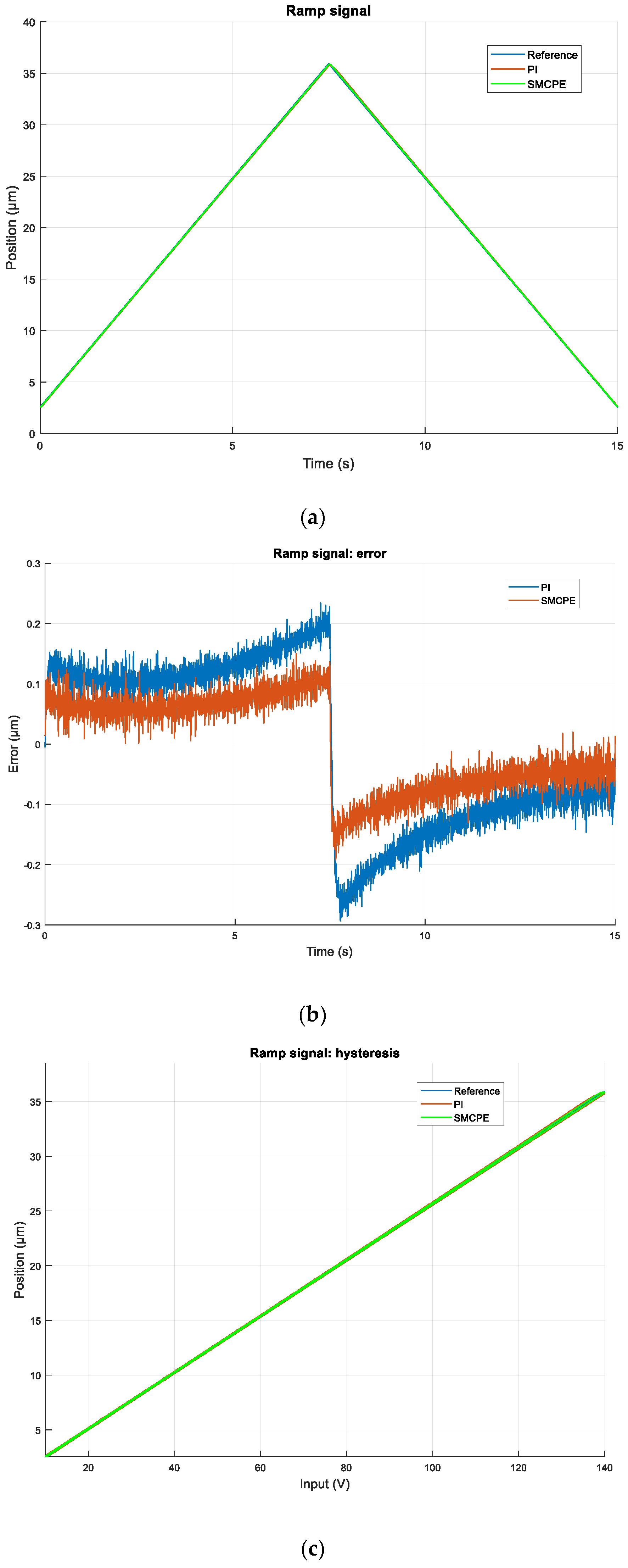
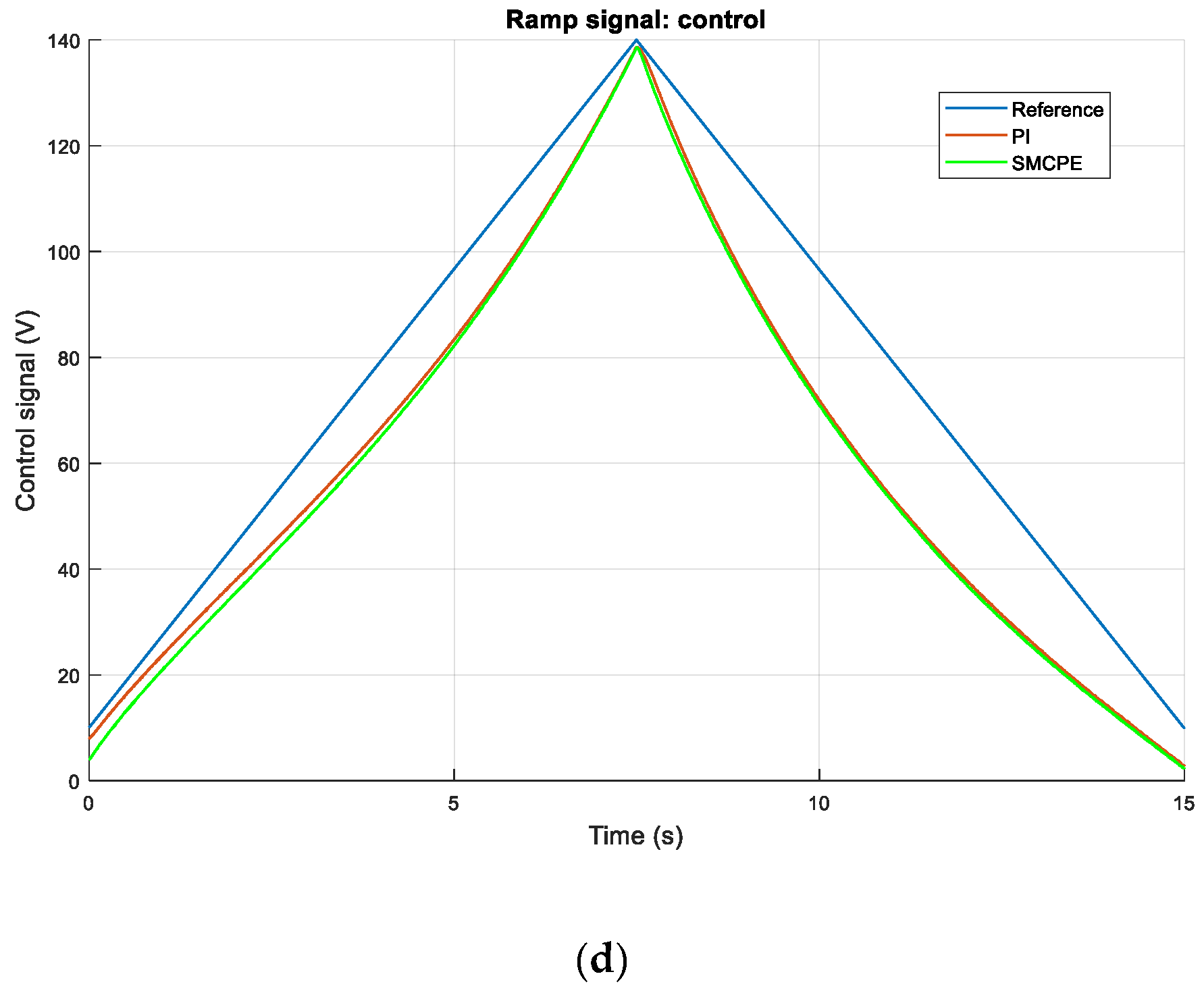
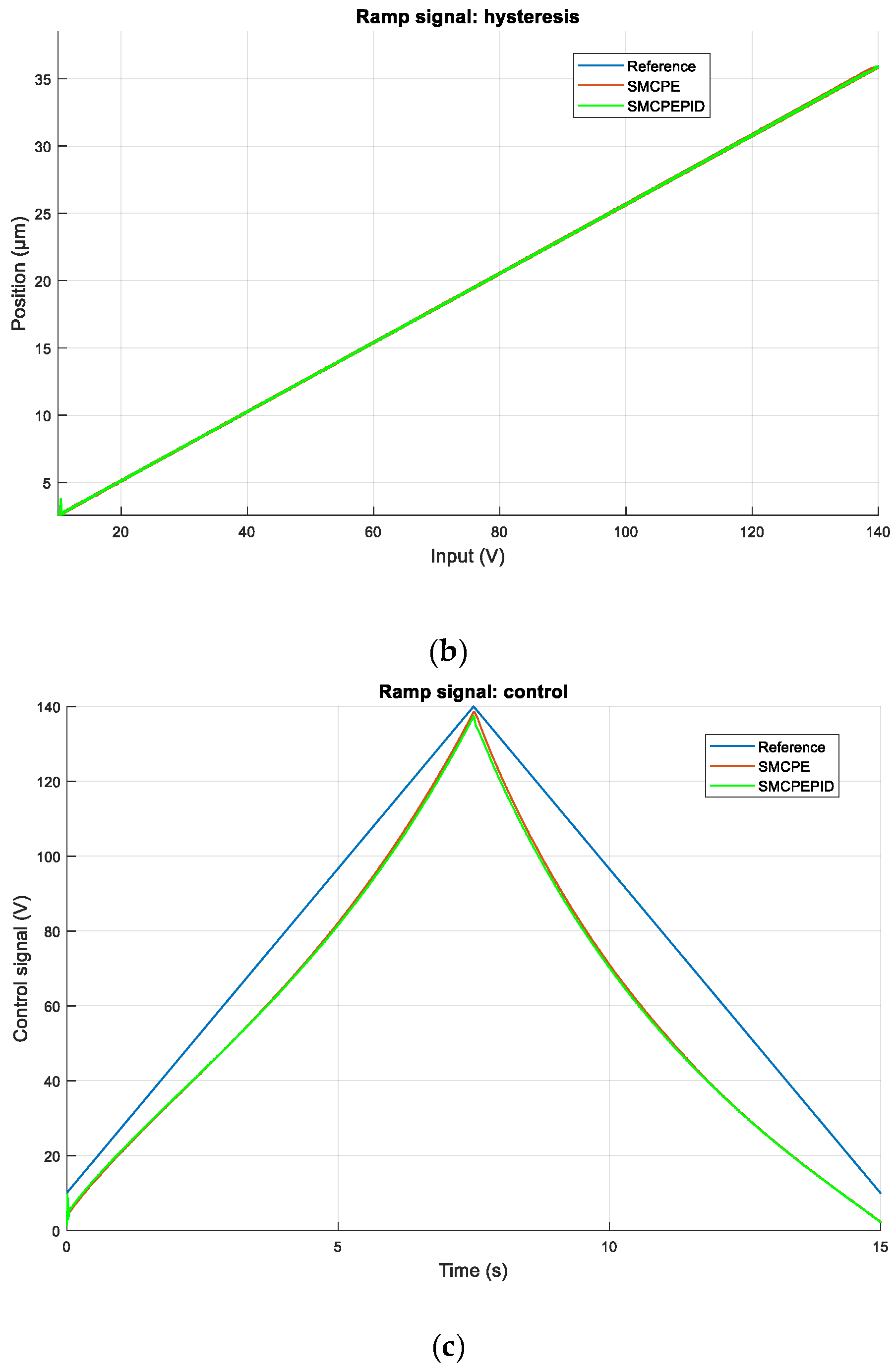
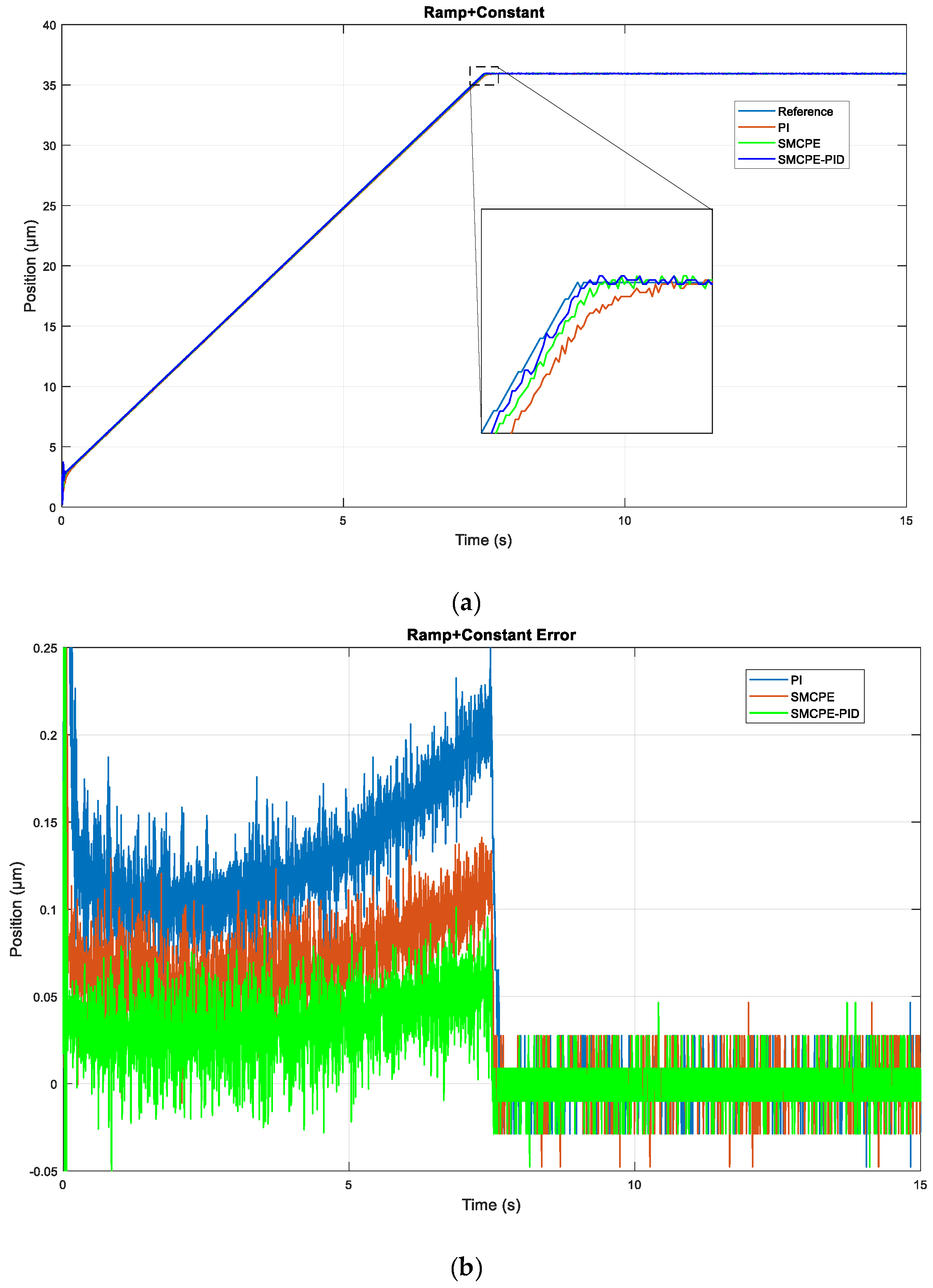
3.3. Ramp Signal Tracking
3.4. Constant Reference Tracking
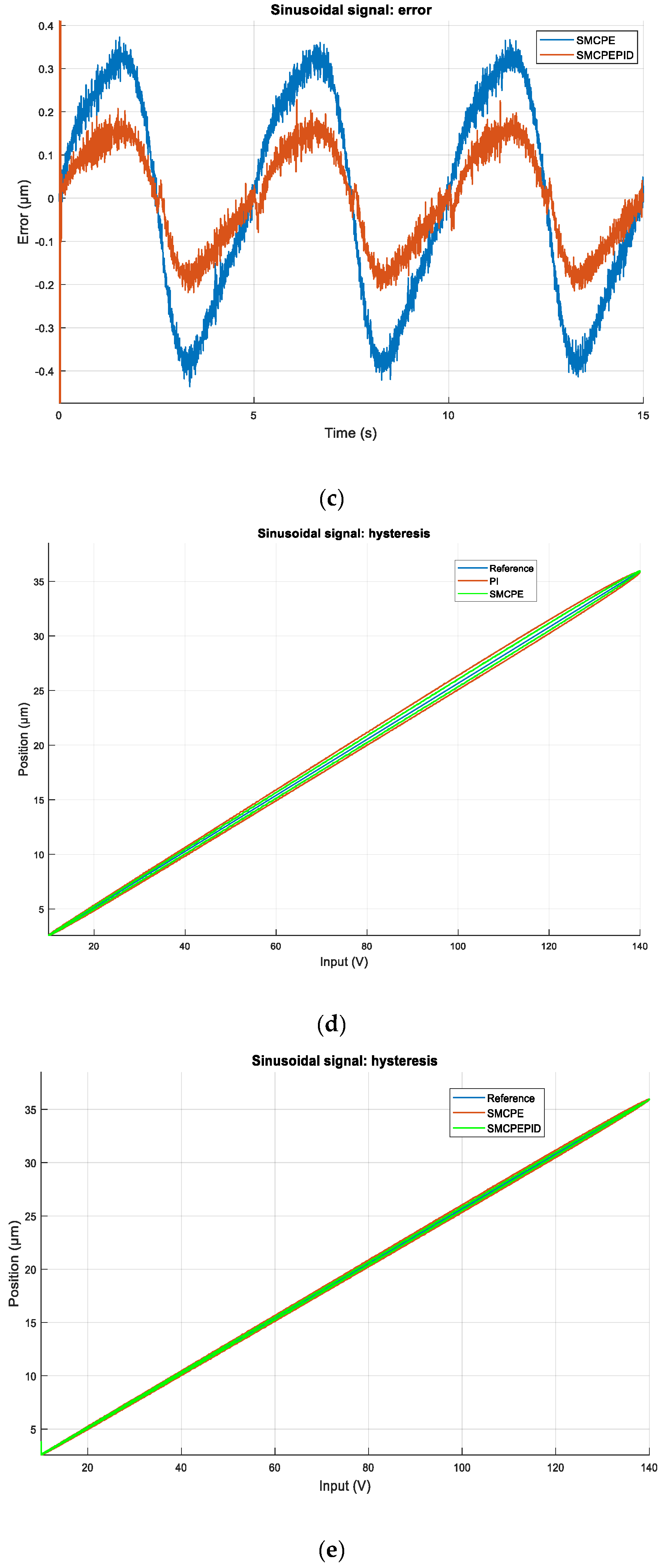
3.5. Sinusoidal Motion Tracking
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Abbott, J.J.; Nagy, Z.; Beyeler, F.; Nelson, B.J. Robotics in the small, part I: Microrobotics. IEEE Robot. Autom. Mag. 2007, 14, 92–103. [Google Scholar] [CrossRef]
- Gu, G.Y.; Zhu, L.M.; Su, C.Y.; Ding, H.; Fatikow, S. Modeling and Control of Piezo-Actuated Nanopositioning Stages: A Survey. IEEE Trans. Autom. Sci. Eng. 2016, 13, 313–332. [Google Scholar] [CrossRef]
- Devasia, S.; Eleftheriou, E.; Moheimani, S.O.R. A survey of control issues in nanopositioning. IEEE Trans. Control Syst. Technol. 2007, 15, 802–823. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Q. Adaptive Sliding Mode Control with Perturbation Estimation and PID Sliding Surface for Motion Tracking of a Piezo-Driven Micromanipulator. IEEE Trans. Control Syst. Technol. 2010, 18, 798–810. [Google Scholar] [CrossRef]
- Rakotondrabe, M. Bouc-Wen Modeling and Inverse Multiplicative Structure to Compensate Hysteresis Nonlinearity in Piezoelectric Actuators. IEEE Trans. Autom. Sci. Eng. 2011, 8, 428–431. [Google Scholar] [CrossRef]
- Gu, G.Y.; Zhu, L.M.; Su, C.Y. Modeling and Compensation of Asymmetric Hysteresis Nonlinearity for Piezoceramic Actuators with a Modified Prandtl-Ishlinskii Model. IEEE Trans. Ind. Electron. 2014, 61, 1583–1595. [Google Scholar] [CrossRef]
- Lin, C.-J.; Yang, S.-R. Precise positioning of piezo-actuated stages using hysteresis-observer based control. Mechatronics 2006, 16, 417–426. [Google Scholar] [CrossRef] [Green Version]
- Xu, H.G.; Ono, T.; Esashi, M. Precise motion control of a nanopositioning PZT microstage using integrated capacitive displacement sensors. J. Micromech. Microeng. 2006, 16, 2747–2754. [Google Scholar] [CrossRef]
- Boukhnifer, M.; Ferreira, A. H∞ loop shaping bilateral controller for a two-fingered tele-micromanipulation system. IEEE Trans. Control Syst. Technol. 2007, 15, 891–905. [Google Scholar] [CrossRef]
- Aphale, S.S.; Devasia, S.; Moheimani, S.O.R. High-bandwidth control of a piezoelectric nanopositioning stage in the presence of plant uncertainties. Nanotechnology 2008, 19, 125503. [Google Scholar] [CrossRef] [Green Version]
- Liu, W.; Cheng, L.; Hou, Z.G.; Yu, J.; Tan, M. An Inversion-Free Predictive Controller for Piezoelectric Actuators Based on a Dynamic Linearized Neural Network Model. IEEE ASME Trans. Mechatron. 2016, 21, 214–226. [Google Scholar] [CrossRef]
- Xu, R.; Zhou, M. A self-adaption compensation control for hysteresis nonlinearity in piezo-actuated stages based on Pi-sigma fuzzy neural network. Smart Mater. Struct. 2018, 27, 045002. [Google Scholar] [CrossRef] [Green Version]
- Xu, Q. Digital Sliding-Mode Control of Piezoelectric Micropositioning System Based on Input–Output Model. IEEE Trans. Ind. Electron. 2014, 61, 5517–5526. [Google Scholar] [CrossRef]
- Kuo, T.-C.; Huang, Y.-J.; Chang, S.-H. Sliding mode control with self-tuning law for uncertain nonlinear systems. ISA Trans. 2008, 47, 171–178. [Google Scholar] [CrossRef] [PubMed]
- Xu, Q.S.; Li, Y.M. Micro-/Nanopositioning Using Model Predictive Output Integral Discrete Sliding Mode Control. IEEE Trans. Ind. Electron. 2012, 59, 1161–1170. [Google Scholar] [CrossRef]
- Chen, X.K.; Hisayama, T. Adaptive Sliding-Mode Position Control for Piezo-Actuated Stage. IEEE Trans. Ind. Electron. 2008, 55, 3927–3934. [Google Scholar] [CrossRef]
- Elmali, H.; Olgac, N. Sliding mode control with perturbation estimation (SMCPE): A new approach. Int. J. Control 1992, 56, 923–941. [Google Scholar] [CrossRef]
- Bashash, S.; Jalili, N. Robust multiple frequency trajectory tracking control of piezoelectrically driven micro/nanopositioning systems. IEEE Trans. Control Syst. Technol. 2007, 15, 867–878. [Google Scholar] [CrossRef]
- Ma, H.F.; Wu, J.H.; Xiong, Z.H. Discrete-Time Sliding-Mode Control with Improved Quasi-Sliding-Mode Domain. IEEE Trans. Ind. Electron. 2016, 63, 6292–6304. [Google Scholar] [CrossRef]
- Slotine, J.J.E.; Spong, M.W. Robust robot control with bounded input torques. J. Robot. Syst. 1985, 2, 329–352. [Google Scholar] [CrossRef]
- Stepanenko, Y.; Cao, Y.; Su, C.-Y. Variable structure control of robotic manipulator with PID sliding surfaces. Int. J. Robust Nonlinear Control 1998, 8, 79–90. [Google Scholar] [CrossRef]
- Eker, I. Sliding mode control with PID sliding surface and experimental application to an electromechanical plant. ISA Trans. 2006, 45, 109–118. [Google Scholar] [CrossRef]
- Low, T.S.; Guo, W. Modeling of a three-layer piezoelectric bimorphbeam with hysteresis. J. Microelectromech. Syst. 1995, 4, 230–237. [Google Scholar] [CrossRef]
- Barambones, O.; Gonzalez de Durana, J.M.; Calvo, I. Adaptive Sliding Mode Control for a Double Fed Induction Generator Used in an Oscillating Water Column System. Energies 2018, 11, 2939. [Google Scholar] [CrossRef]
- Utkin, V.I. Sliding mode control design principles and applications to electric drives. IEEE Trans. Ind. Electron. 1993, 40, 26–36. [Google Scholar] [CrossRef]
- Slotine, J.J.E.; Li, W. Applied Nonlinear Control; Prentice-Hall: Englewood Cliffs, NJ, USA, 1991; ISBN 978-0130408907. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| n | 1 | |
| m | 0.1343 | kg |
| b | 67.899 | N s/m |
| k | 262.78 | N/m |
| α | 0.0284 | |
| β | 0.0207 | |
| γ | 0.0727 |
| Controller. | Parameter | Value |
|---|---|---|
| PI | Kp | 1 |
| Ki | 0.001 | |
| SMCPE | λ | 1000 |
| η | 25 | |
| δ | 0.01 | |
| SMCPE w/PID sliding surface | λ1 | 450 |
| λ2 | 300 | |
| η | 0.5 | |
| δ | 18 |
| PI | 1.9734 × 10−6 |
| SMCPE | 8.7837 × 10−7 |
| SMCPE-PID | 5.4097 × 10−7 |
| PI | 6.0586 × 10−6 |
| SMCPE | 2.6139 × 10−6 |
| SMCPE-PID | 1.5441 × 10−6 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chouza, A.; Barambones, O.; Calvo, I.; Velasco, J. Sliding Mode-Based Robust Control for Piezoelectric Actuators with Inverse Dynamics Estimation. Energies 2019, 12, 943. https://doi.org/10.3390/en12050943
Chouza A, Barambones O, Calvo I, Velasco J. Sliding Mode-Based Robust Control for Piezoelectric Actuators with Inverse Dynamics Estimation. Energies. 2019; 12(5):943. https://doi.org/10.3390/en12050943
Chicago/Turabian StyleChouza, Ander, Oscar Barambones, Isidro Calvo, and Javier Velasco. 2019. "Sliding Mode-Based Robust Control for Piezoelectric Actuators with Inverse Dynamics Estimation" Energies 12, no. 5: 943. https://doi.org/10.3390/en12050943