5.1. MATLAB Simulation
The proposed algorithm for the CS was set up in MATLAB/Simulink. All the energy sources are first modeled individually and then integrated with each other to foam a CS. Three charging points are considered in the proposed CS. The range of PHEV battery capacity is from 4.4 kWh to 24 kW [
22], whereas in this research work the battery capacity is taken as 6.6 kWh, which is the standard rating of Honda Accord plug-in car [
23]. Thirteen PHEVs are selected for the charging purpose at different timings. Their minimum and maximum SOCs are defined by the car owners. Once the battery reaches its maximum SOC, the BPS prevents it from further charging. The time schedule of charging, SOCs, CDs and car number (CN) are presented in
Table 2. The technical parameters of WT, ESS, NG, DC/AC converter, DL, DC/DC converters and gains of all the controllers are enlisted in
Table 3 and
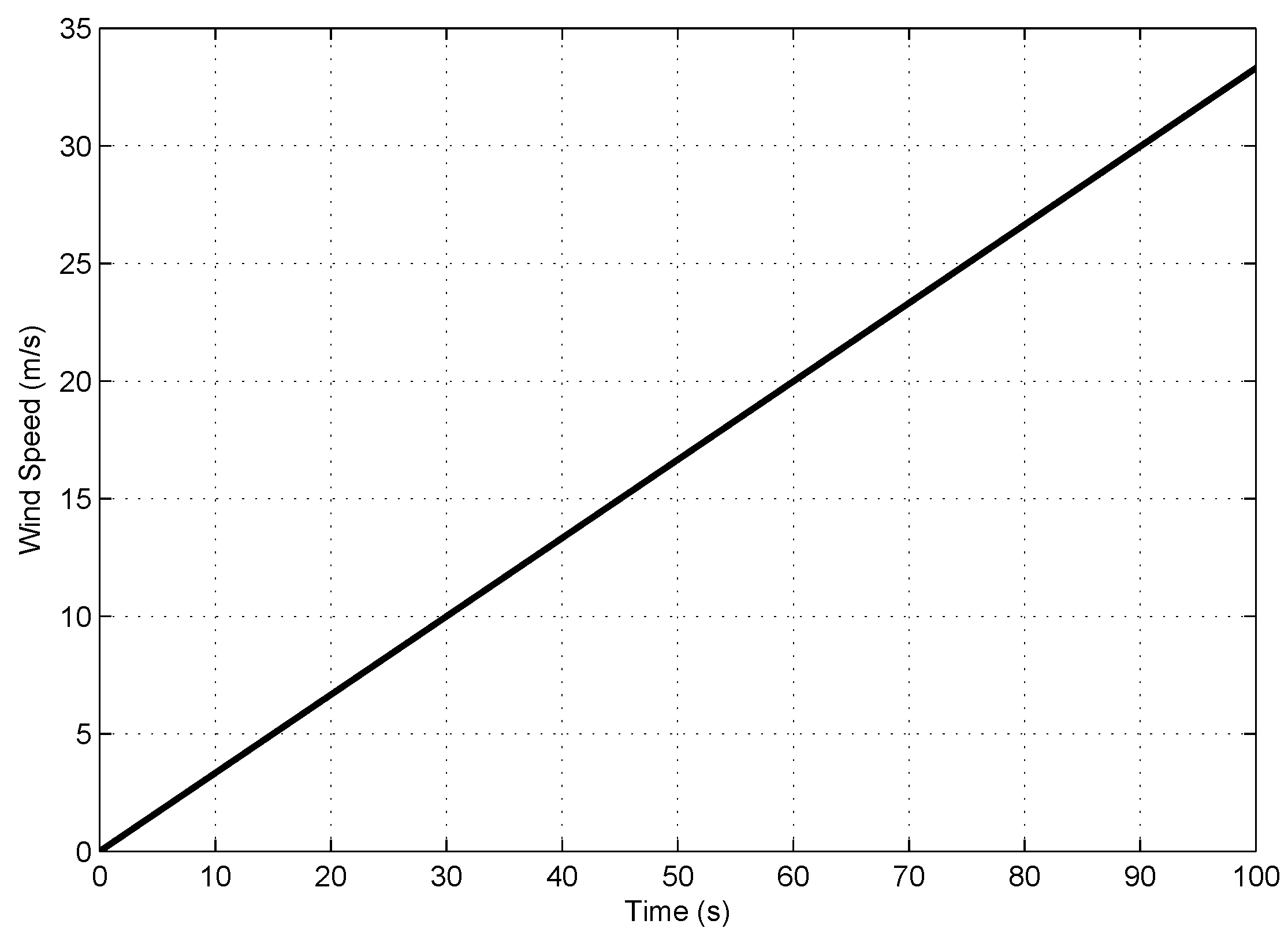
Table 4. Initially, the WT system is controlled with an improved fuzzy controller. The ramp function of wind speed is provided to the WT system as shown in
Figure 11. As the wind speed and output power have a cubic relationship, therefore, output power is increased to 59.5 kW. At t = 39 s, the output power reaches its maximum limit. At this stage, the controller holds the output power to 59.5 kW as shown in
Figure 12. Finally, once the wind speed reaches the cut-out speed, the output power drops to zero.
The improved fuzzy controller adjusts the pitch angle in order to obtain the maximum output power from the wind system. The variation in pitch angle versus time is shown in
Figure 13. The comparison between the traditional PI controller and improved fuzzy controller is shown in
Figure 14. The PI controller takes more than 1 s to stabilize the system, while an improved fuzzy controller stabilizes the system in 0.1 s.
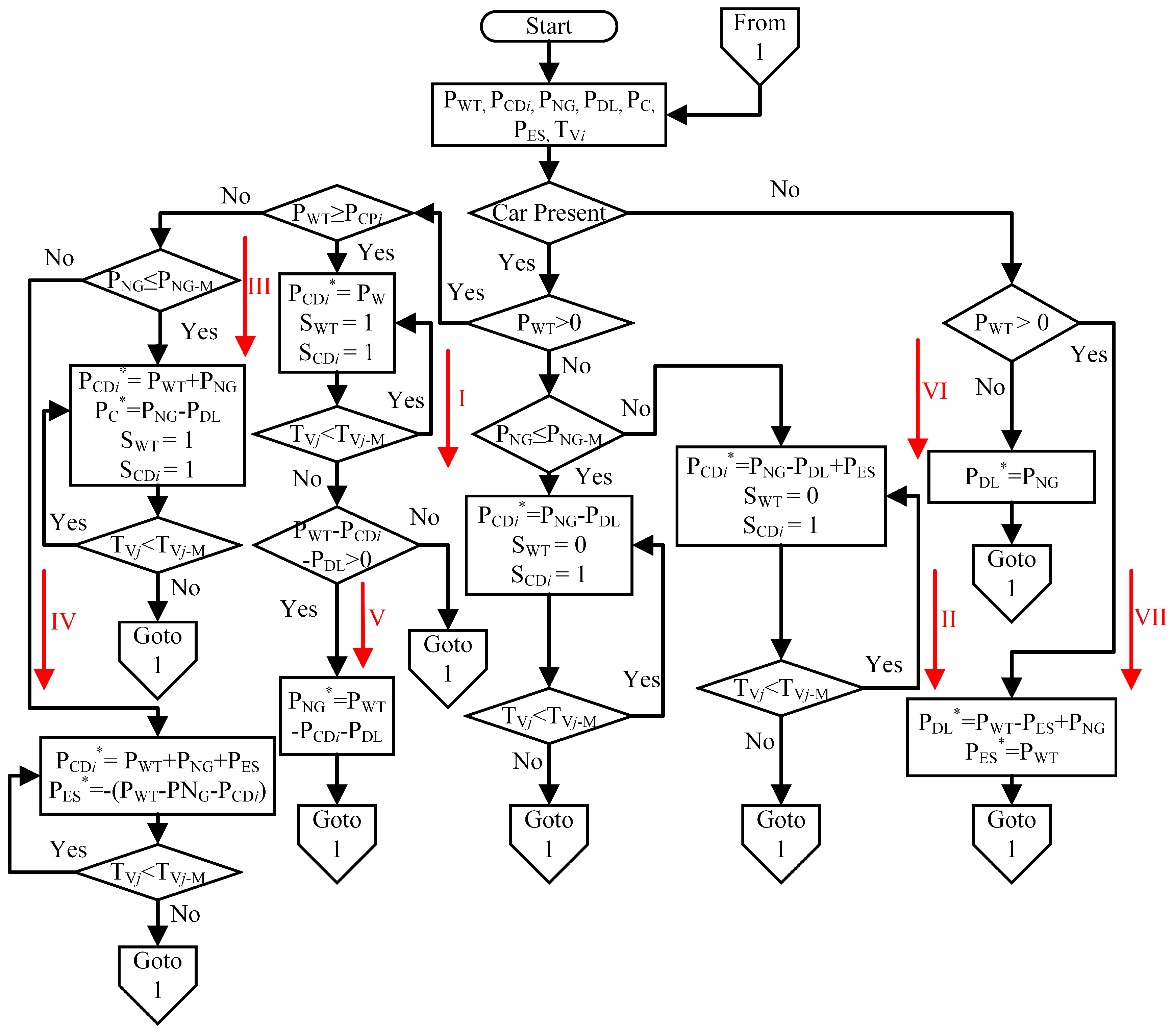
The EMS generates the operating state sequence based on generalized algorithm. The sequence is shown in
Figure 15.
Figure 16,
Figure 17,
Figure 18,
Figure 19,
Figure 20 and
Figure 21 illustrate the output powers of WT, NG, DL, CDs, and ESS along with operating state at different time intervals. For t = 0–4 h, the power of different sources/load is presented in
Figure 8. In this interval, from 0–1 H, the DL is 10.2 kW (
Figure 16a) while WT output power is zero. So, the system only relies on NG. NG provides the power of 16.2 kW (10.2 kW for DL and 6.6 kW of CD1) as shown in
Figure 16d. Therefore, the total power of NG is less than 18 kW (
), there is no need to activate the ESS as shown in
Figure 16e. In this state, the EMS operates in state I. Similarly, for t = 1–3 h, there is no car present in any of the CD, and DL varies from 11 kW to 11.5 kW. The WT generates some power, which is directly given to DL and NG. Hence, the EMS operates in state VII as illustrated in
Figure 16f. From 3–4 h, the WT generates power of 17 kW, while the CD’s demand is 19.8 kW, so the WT does not completely satisfy the CDs. In this case, the NG helps the WT fulfilthe deficient power of CDs along with DL. The overall load demand for NG is less than its maximum rating, so there was no need for ESS is this interval. The EMS shifts to state III in this interval.
Figure 17 shows the output power/power consumption of different sources/loads for the interval 4–8 h. Throughout the period, there is no car present for charging. From 4–5.2 h and 7.8–8 h, the WT generates output power of 18 kW as shown in
Figure 17b. Due to there being no car, the EMS either directly sends all the WT power to the ESS or to the NG. During these intervals, EMS sent WT power to charge ESS as shown in
Figure 17e and the system operates in state VII. Whereas for the remainder of the time, the EMS helps the NG to satisfy the DL demand and the system operates in state VI.
Figure 18 shows the output power/power consumption of different sources/loads for the interval 8–12 h. At t = 8–9 h, there is no car present in any CD, and the WT is generating power of 25 kW. So, the overall WT output power is fed to ESS for charging and also given to DL. There is no need of NG is this state, keeping the system in the VII operating state as shown in
Figure 18d,f. Similarly, for t = 9–10 h and 11–12 h, the CDs load demand is 12.2 kW and 6.6 kW as depicted in
Figure 18c. But, due to the extensive amount of wind flow, the WT generates sufficient power to fulfil not only the CDs demand, but also provide excess power to the DL and NG and the system moves to state V. For the remaining time, i.e., t = 10–11 h due to non-presence of any car, all the WT is power is directly fed to DL and NG keeping ESS disconnected and shifting the operating system in state VI.
Figure 19 shows the output power/power consumption of different sources/loads for the interval 12–16 h. From t = 12–13 h and 14–15 h, the CDs demand is 6.6 kW, while the WT output power is more than 10 kW. Therefore, WT output power is sufficient to satisfy the CDs demand. On the other side, the DL demand lies between 16–20 kW, the WT power left after satisfying the CDs demand is not sufficient to meet the DL demand. Thus, the remaining DL demand is fulfilled by NG keeping the system in state V. As in these intervals the overall load demand for NG is less than its maximum rating, so there was no need of ESS as shown in
Figure 19e. Similarly, for t = 13–14 h, no PHEV present for charging, providing all the WT power to the NG and DL and moving system to state VI. Finally, between 15–16 h, the EMS changes its state very rapidly from V to III to IV to II as illustrated in
Figure 19f. At state III, the WT power becomes less than CD’s demand, the NG starts providing power to the CDs and DL but its total demand is less than PNG-M, and EMS operates the system in state III. After some time, the total demand on NG exceeds its maximum rating and ESS is turned on by EMS to fulfil the power deficiency. Hence, in this situation the EMS shifts from state III to IV. In the same way, after some time the WT output power becomes zero and the DL and CD relies on NG and ESS while EMS jumps to state II from IV.
Figure 20 shows the output power/power consumption of different sources/loads for the interval 16–20 h. From t = 16–18 h, the WT output power is zero and also no car is present in any of the CD. So, the NG simply satisfies the DL demand and EMS operates in state VI. For t = 17–18 h, the WT starts generating power, reducing burden on NG, and no car is present. Hence the WT directly fed the DL and NG is this interval as shown in
Figure 20b,d and EMS keeps the system in state VI. In the final hour (19–20 h), the CDs load demand is 6.6 kW, while the WT output power is above 20 kW. WT not only satisfies the CDs demand, it also provides power to the DL and NG while the EMS moves to state V.
Figure 21 shows the output power/power consumption of different sources/loads for the final four hours of a day. For majority of the time (i.e., t = 20–21 h and 22–24 h), there is no car present. The WT is generating power (It directly fed power to DL and sometimes it fed power to the both DL and NG) as shown in the
Figure 21a,b,d. The EMS keeps the system in state VI. For the remaining time when there is any car/s present in the CD for charging, the WT fulfils its complete power demand and share excess of its power to the DL and NG, shifting the state to V.
For proposed CS, each car is charged once a day. As per the charging schedule given in
Table 2, one car per CD is charged during 0–1, 11–12, 12–13, 14–15, 15–16 and 19–20 h, two cars per two CDs at a time are charged during 9–10 and 21–22 h, respectively and three cars with one car per CD at a time are charged at 3–4 h. Corresponding SOCs of cars throughout a day is shown in
Figure 22.
The load voltage (L-L) and frequency are 440 V and 50 Hz, respectively. According to IEEE 1547 Standards [
24], the maximum allowable deviation in load L-L voltage, frequency, voltage THD and current THD are ±6%, ±0.8%, 5% and 5%, respectively. It is clearly revealed from the
Figure 23 that the designed EMS for proposed CS kept the load parameters in allowable limits. Hence, the system is called as stable one. Similarly, the variation in DC bus voltage using improved fuzzy controller and PID controller is shown in the
Figure 24. The improved fuzzy controller shows better performance keeping the voltage in standard allowable limits.
Figure 25 exhibits the dynamic performance of grid connected inverter at AC bus in which the current is decreased while voltages are altered somewhere, but kept constant very quickly.

 ,
, 

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}