DG System Using PFNN Controllers for Improving Islanding Detection and Power Control †


Abstract
:1. Introduction
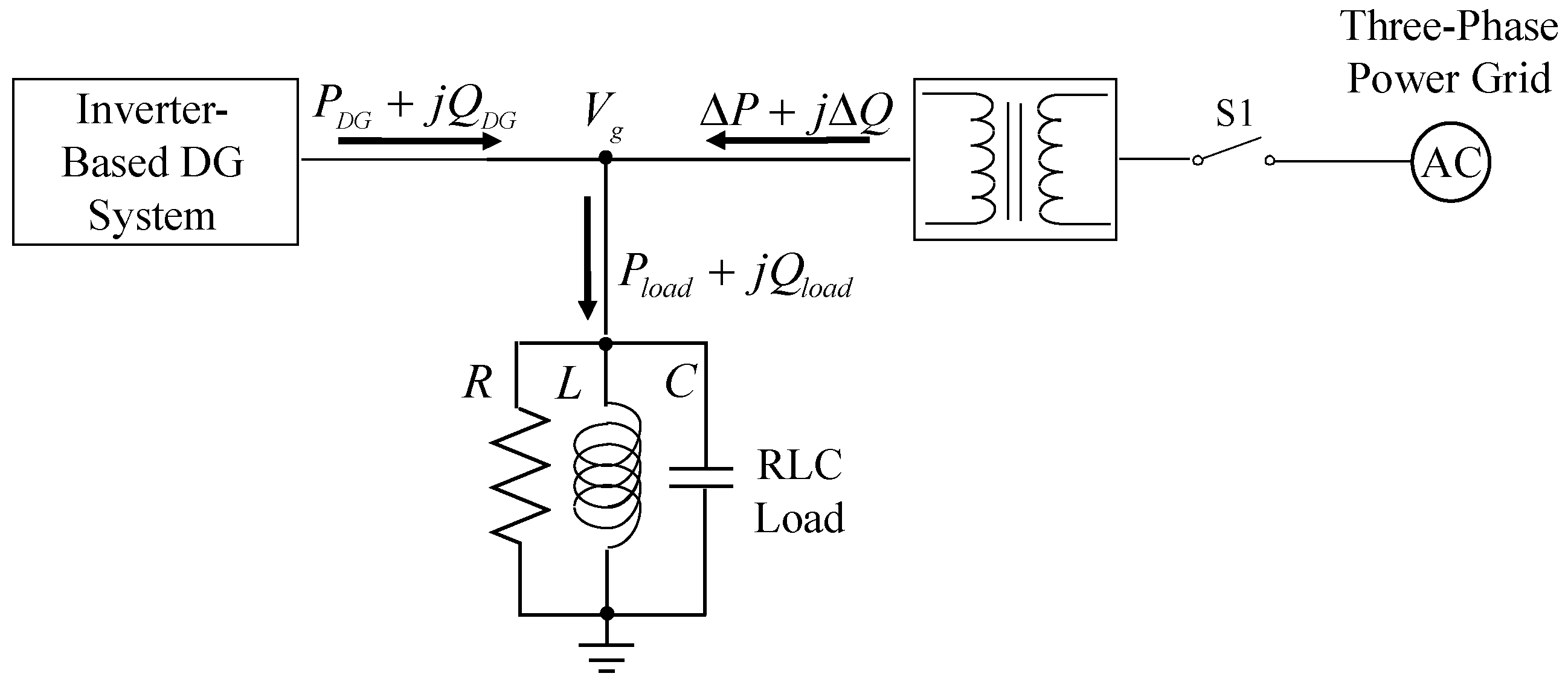
2. Inverter-Based DG System
3. Active Islanding Detection Method
3.1. Non-Detection Zone
3.2. Novel Active Islanding Detection Method Using PI Controller
4. Probabilistic Fuzzy Neural Network
4.1. Network Structure
Input Layer (Layer 1):
Membership Layer (Layer 2):
Probabilistic Layer (Layer 3):
Rule Layer (Layer 4):
Output Layer (Layer 5):
4.2. Online Learning Using Backpropagation Algorithm
Output Layer:
Rule Layer:
Membership Layer:
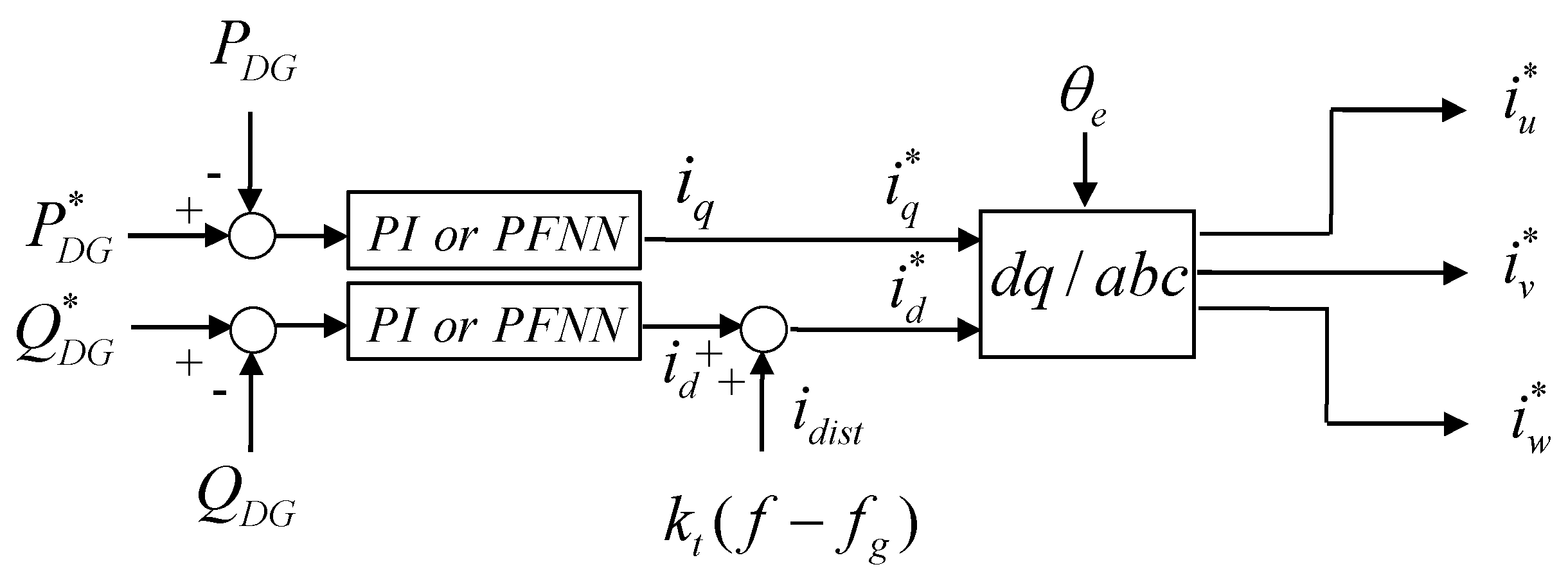
5. Novel Active Islanding Detection Using PFNN Controller
6. Design and Experimental Results
6.1. Design
6.2. Experimental Results of Tracking Control
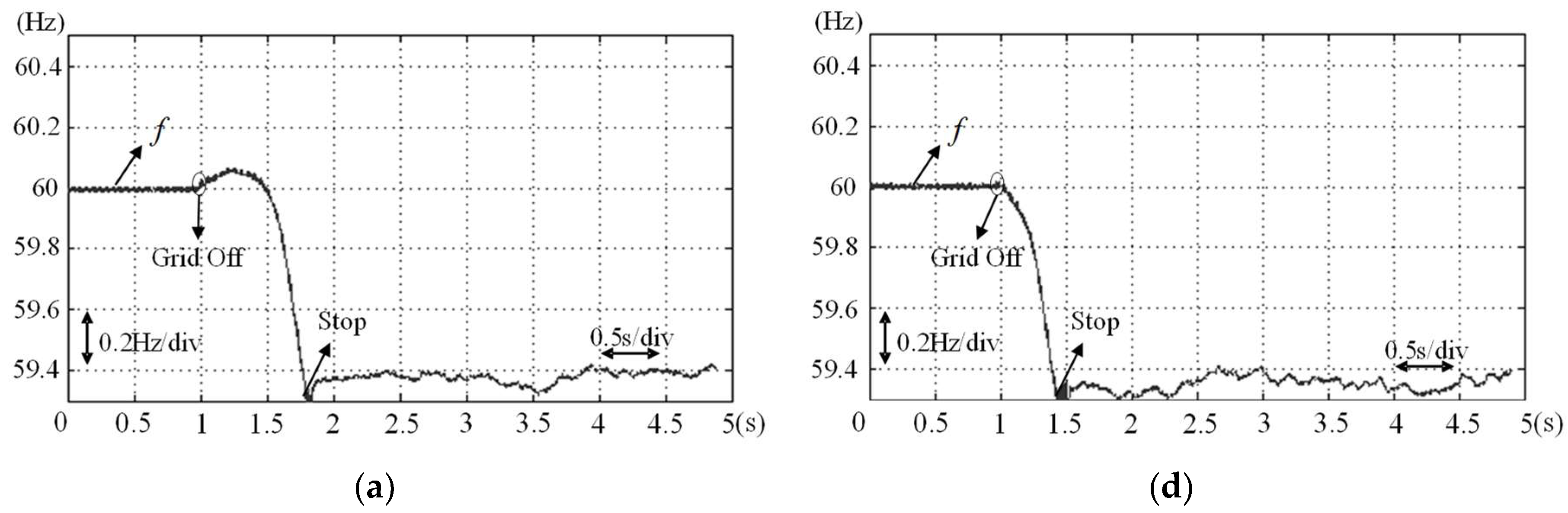
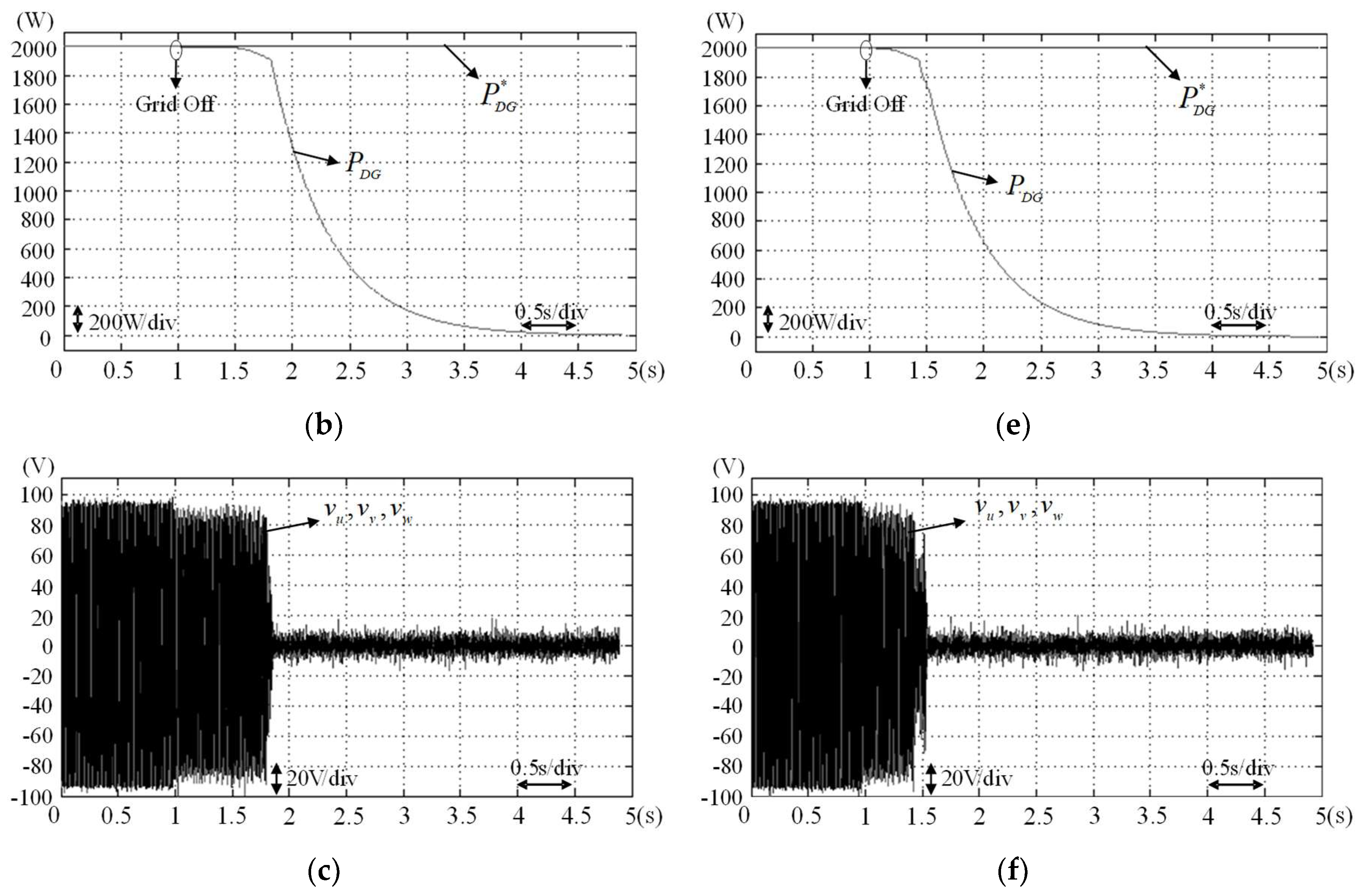
6.3. Experimental Results of Islanding Detection
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chen, X.; Li, Y. An islanding detection method for inverter-based distributed generators based on the reactive power disturbance. IEEE Trans. Power Electron. 2016, 31, 3559–3574. [Google Scholar] [CrossRef]
- Park, S.; Kwon, M.; Choi, S. Reactive power P&O anti-islanding method for a grid-connected inverter with critical load. IEEE Trans. Power Electron. 2019, 34, 204–212. [Google Scholar]
- Ghalavand, F.; Alizade, B.A.M.; Gaber, H.; Karimipour, H. Microgrid islanding detection based on mathematical morphology. Energies 2018, 11, 2696. [Google Scholar] [CrossRef]
- Sun, Q.; Guerrero, J.M.; Jing, T.; Vasquez, J.C.; Yang, R. An islanding detection method by using frequency positive feedback based on FLL for single-phase microgrid. IEEE Trans. Smart Grid 2017, 8, 1821–1830. [Google Scholar] [CrossRef]
- Al Hosani, M.; Qu, Z.; Zeineldin, H.H. Development of dynamic estimators for islanding detection of inverter-based DG. IEEE Trans. Power Deliv. 2015, 30, 428–436. [Google Scholar] [CrossRef]
- Makwana, Y.M.; Bhalja, B.R. Experimental performance of an islanding detection scheme based on modal components. IEEE Trans. Smart Grid 2019, 10, 1025–1035. [Google Scholar] [CrossRef]
- IEEE Standard for Interconnecting Distributed Resources with Electric Power Systems; IEEE Std. 1547-2003; IEEE Standard Association: Piscataway, NJ, USA, 2003.
- Inverters, Converters, and Controllers for Use in Independent Power Systems; UL Std. 1741; Underwriters Laboratories Inc.: Northbrook, IL, USA, 2002.
- Kim, J.H.; Kim, J.G.; Ji, Y.H.; Jung, Y.C.; Won, C.Y. An islanding detection method for a grid-connected system based on the goertzel algorithm. IEEE Trans. Power Electron. 2011, 26, 1049–1055. [Google Scholar] [CrossRef]
- Khodaparastan, M.; Vahedi, H.; Khazaeli, F.; Oraee, H. A novel hybrid islanding detection method for inverter-based DGs using SFS and ROCOF. IEEE Trans. Power Deliv. 2017, 32, 2162–2170. [Google Scholar] [CrossRef]
- Faqhruldin, O.N.; El-Saadany, E.F.; Zeineldin, H.H. A universal islanding detection technique for distributed generation using pattern recognition. IEEE Trans. Smart Grid 2014, 5, 1985–1992. [Google Scholar] [CrossRef]
- Liu, N.; Aljankawey, A.; Diduch, C.; Chang, L.; Su, J. Passive islanding detection approach based on tracking the frequency-dependent impedance change. IEEE Trans. Power Deliv. 2015, 30, 2570–2580. [Google Scholar] [CrossRef]
- Najy, W.K.A.; Zeineldin, H.H.; Kasem Alaboudy, A.H.; Woon, W.L. A bayesian passive islanding detection method for inverter-based distributed generation using ESPRIT. IEEE Trans. Power Deliv. 2011, 26, 2687–2696. [Google Scholar] [CrossRef]
- Ropp, M.E.; Begovic, M.; Rohatgi, A.; Kern, G.A.; Bonn, R.H.; Gonzalez, S. Determining the relative effectiveness of islanding detection methods using phase criteria and nondetection zones. IEEE Trans. Energy Convers. 2000, 15, 290–296. [Google Scholar] [CrossRef]
- Vahedi, H.; Gharehpetian, G.B.; Karrari, M. Application of duffing oscillators for passive islanding detection of inverter-based distributed generation units. IEEE Trans. Power Deliv. 2012, 27, 1973–1983. [Google Scholar] [CrossRef]
- Reigosa, D.; Briz, F.; Charro, C.B.; Garcia, P.; Guerrero, J.M. Active islanding detection using high-frequency signal injection. IEEE Trans. Ind. Appl. 2012, 48, 1588–1597. [Google Scholar] [CrossRef]
- Zeineldin, H.H.; Conti, S. Sandia frequency shift parameter selection for multi inverter systems to eliminate non-detection zone. IET Renew. Power Gener. 2011, 5, 175–183. [Google Scholar] [CrossRef]
- Wang, X.; Freitas, W. Impact of positive-feedback anti-islanding methods on small-signal stability of inverter-based distributed generation. IEEE Trans. Energy Convers. 2008, 23, 923–931. [Google Scholar] [CrossRef]
- Liu, F.; Kang, Y.; Zhang, Y.; Duan, S.; Lin, X. Improved SMS islanding detection method for grid-connected converters. IET Renew. Power Gener. 2010, 4, 36–42. [Google Scholar] [CrossRef]
- Timbus, A.; Oudalov, A.; Ho, C.N.M. Islanding detection in smart grids. In Proceeding of the IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010; pp. 3631–3637. [Google Scholar]
- Xu, W.; Zhang, G.; Li, C.; Wang, W.; Wang, G.; Kliber, J. A power line signaling based technique for anti-islanding protection of distributed generators—Part I: Scheme and analysis. IEEE Trans. Power Deliv. 2007, 22, 1758–1766. [Google Scholar] [CrossRef]
- Lin, F.J.; Lu, K.C.; Ke, T.H.; Yang, B.H.; Chang, Y.R. Reactive power control of three-phase grid-connected PV system during grid faults using takagi–sugeno–kang probabilistic fuzzy neural network control. IEEE Trans. Ind. Electron. 2015, 62, 5516–5528. [Google Scholar] [CrossRef]
- Tan, K.H. Squirrel-cage induction generator system using wavelet petri fuzzy neural network control for wind power applications. IEEE Trans. Power Electron. 2016, 31, 5242–5245. [Google Scholar] [CrossRef]
- Tan, K.H.; Lin, F.J.; Tsai, C.Y.; Chang, Y.R. A distribution static compensator using a CFNN-AMF controller for power quality improvement and DC-link voltage regulation. Energies 2018, 11, 1996. [Google Scholar] [CrossRef]
- Tan, K.H.; Lin, F.J.; Chen, J.H. DC-link voltage regulation using RPFNN-AMF for three-phase active power filter. IEEE Access 2018, 6, 37454–37463. [Google Scholar] [CrossRef]
- Rubaai, A.; Young, P. Hardware/software implementation of fuzzy-neural-network self-learning control methods for brushless DC motor drives. IEEE Trans. Ind. Appl. 2016, 52, 414–424. [Google Scholar] [CrossRef]
- Beritelli, F.; Capizzi, G.; Sciuto, G.L.; Napoli, C.; Scaglione, F. Rainfall estimation based on the intensity of the received signal in a LTE/4G mobile terminal by using a probabilistic neural network. IEEE Access 2018, 6, 30865–30873. [Google Scholar] [CrossRef]
- Specht, D.F. Probabilistic neural network. Neural Netw. 1990, 3, 109–118. [Google Scholar] [CrossRef]
- Tripathy, M.; Maheshwari, R.P.; Verma, H.K. Probabilistic neural-network-based protection of power transformer. IET Electr. Power Appl. 2007, 1, 793–798. [Google Scholar] [CrossRef]
- Perera, N.; Rajapakse, A.D. Recognition of fault transients using a probabilistic neural-network classifier. IEEE Trans. Power Deliv. 2011, 26, 410–419. [Google Scholar] [CrossRef]
- Lin, F.J.; Tan, K.H. Squirrel-cage induction generator system using probabilistic fuzzy neural network for wind power applications. In Proceeding of the IEEE International Conference on Fuzzy Systems, Istanbul, Turkey, 2–5 August 2015; pp. 1–8. [Google Scholar]
- Lin, F.J.; Huang, Y.S.; Tan, K.H.; Lu, Z.H.; Chang, Y.R. Intelligent-controlled doubly fed induction generator system using PFNN. Neural Comput. Appl. 2013, 22, 1695–1712. [Google Scholar] [CrossRef]
- Lin, F.J.; Huang, Y.S.; Tan, K.H.; Chiu, J.H.; Chang, Y.R. Active islanding detection method using d-axis disturbance signal injection with intelligent control. IET Gener. Transm. Distrib. 2013, 7, 537–550. [Google Scholar] [CrossRef]
- Tan, K.H.; Hu, C.C.; Lan, C.W.; Lin, S.S.; Chang, T.J. Active islanding detection method using intelligent controller. Int. J. Electr. Comput. Energ. Electron. Commun. Eng. 2016, 10, 1–7. [Google Scholar]
- Kowalski, P.A.; Kusy, M. Sensitivity analysis for probabilistic neural network structure reduction. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 1919–1932. [Google Scholar] [CrossRef] [PubMed]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller | Detection Time (S) | ||
|---|---|---|---|
| Case 1 (60 Hz) | Case 2 (59.9 Hz) | Case 3 (60.1 Hz) | |
| PI | 0.8 | 0.35 | 0.9 |
| PFNN | 0.45 | 0.3 | 0.7 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, K.-H.; Lan, C.-W. DG System Using PFNN Controllers for Improving Islanding Detection and Power Control. Energies 2019, 12, 506. https://doi.org/10.3390/en12030506
Tan K-H, Lan C-W. DG System Using PFNN Controllers for Improving Islanding Detection and Power Control. Energies. 2019; 12(3):506. https://doi.org/10.3390/en12030506
Chicago/Turabian StyleTan, Kuang-Hsiung, and Chien-Wu Lan. 2019. "DG System Using PFNN Controllers for Improving Islanding Detection and Power Control" Energies 12, no. 3: 506. https://doi.org/10.3390/en12030506