Development of a Control Platform for a Building-Scale Hybrid Solar PV-Natural Gas Microgrid

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
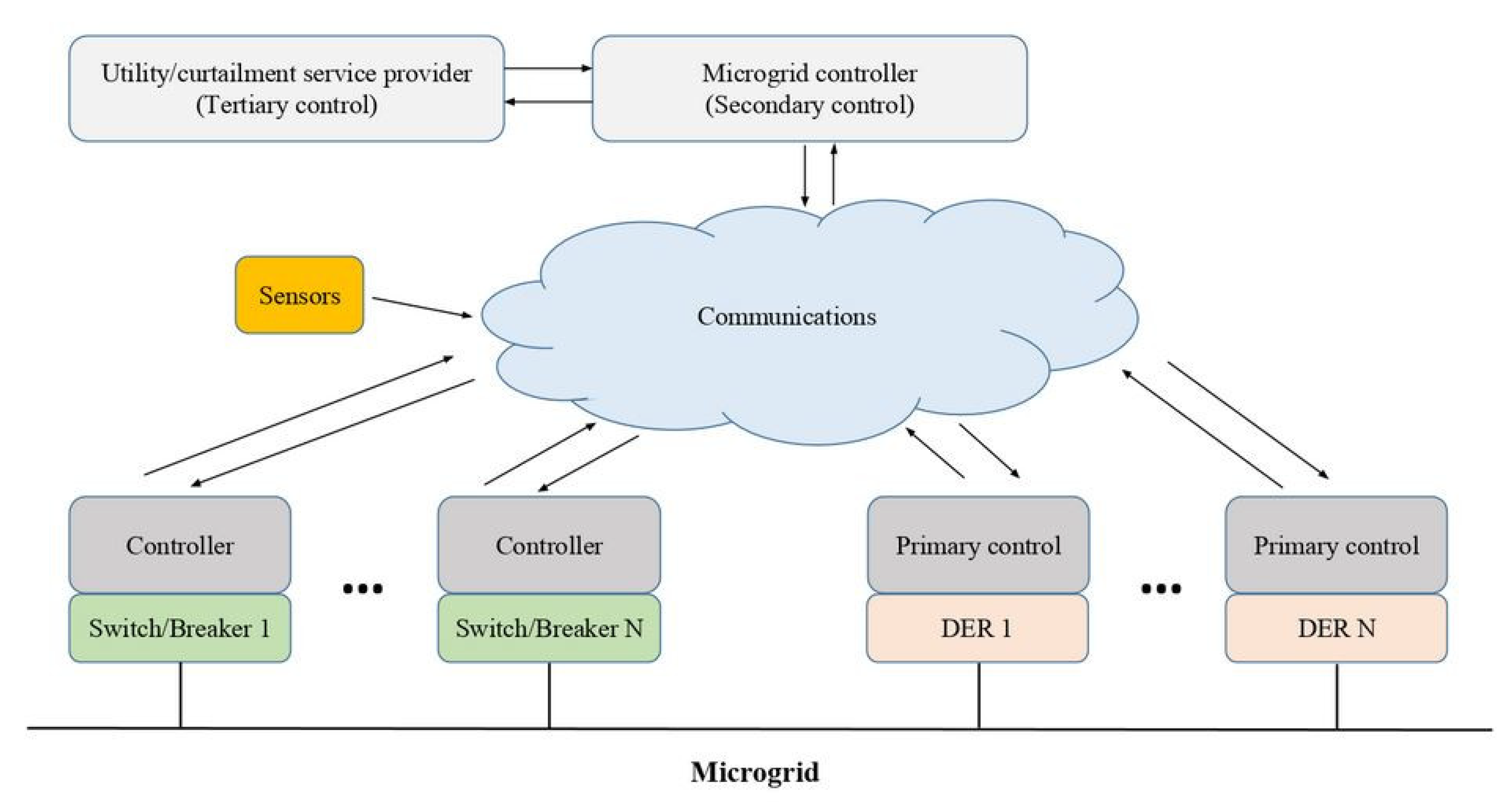
2. Hierarchical Control in Microgrids
2.1. Functions of a Microgrid Controller
- Uninterruptible supply of sensitive loads
- Seamless disconnection (island mode) and reconnection:
- Delivery of active power and reactive power per the needs of the microgrid and/or the distribution system
- DER operation per assigned set point within their operational limits
- DER generation optimization while factoring in exchanges with the utility and market participation
2.2. Hierarchical Control Layers in Microgrids
2.3. Communications for Hierarchical Control
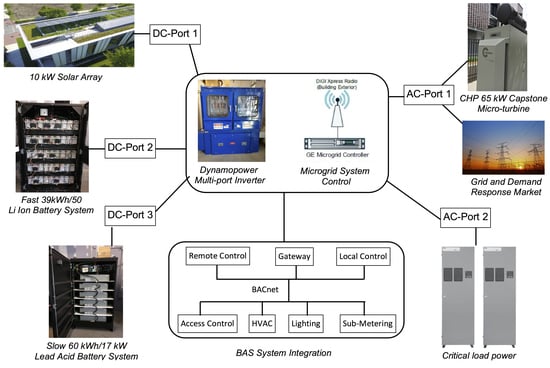
3. Microgrid Components and Layout
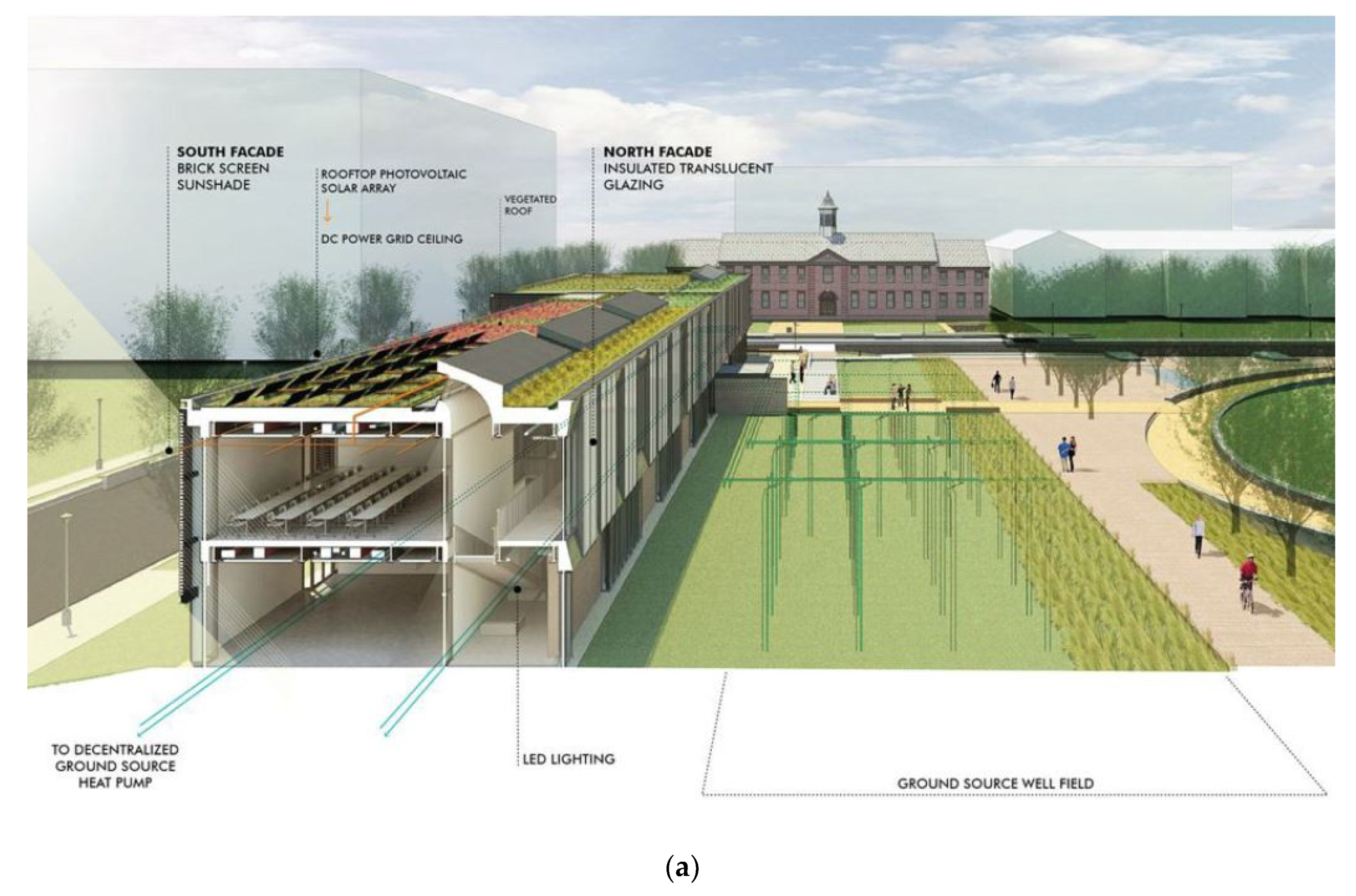
3.1. Microgrid Host Site-Building 7R
3.2. Distributed Energy Resources (DERs)
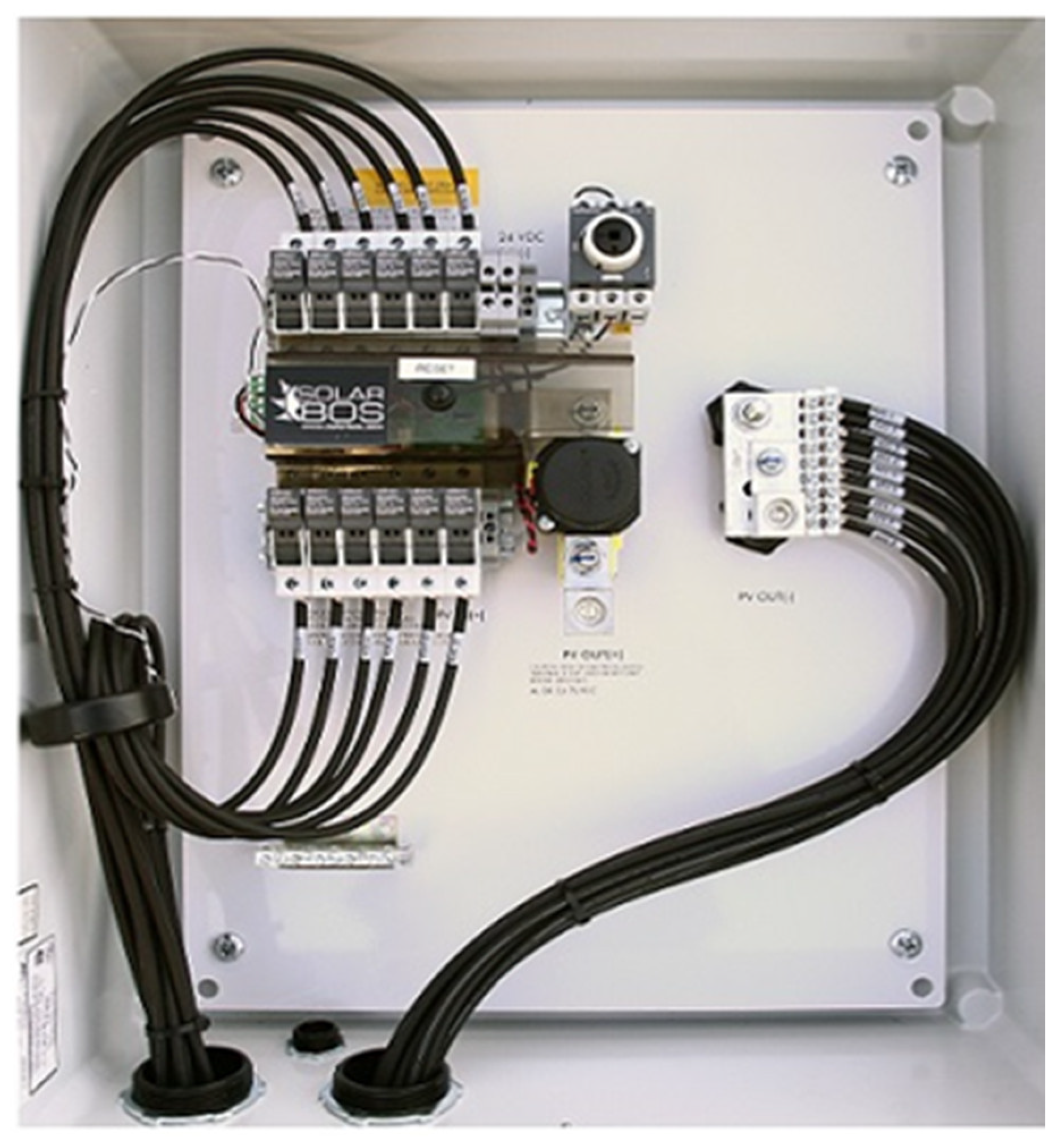
3.2.1. Solar PV
3.2.2. Energy Storage
3.2.3. Multiport Inverter
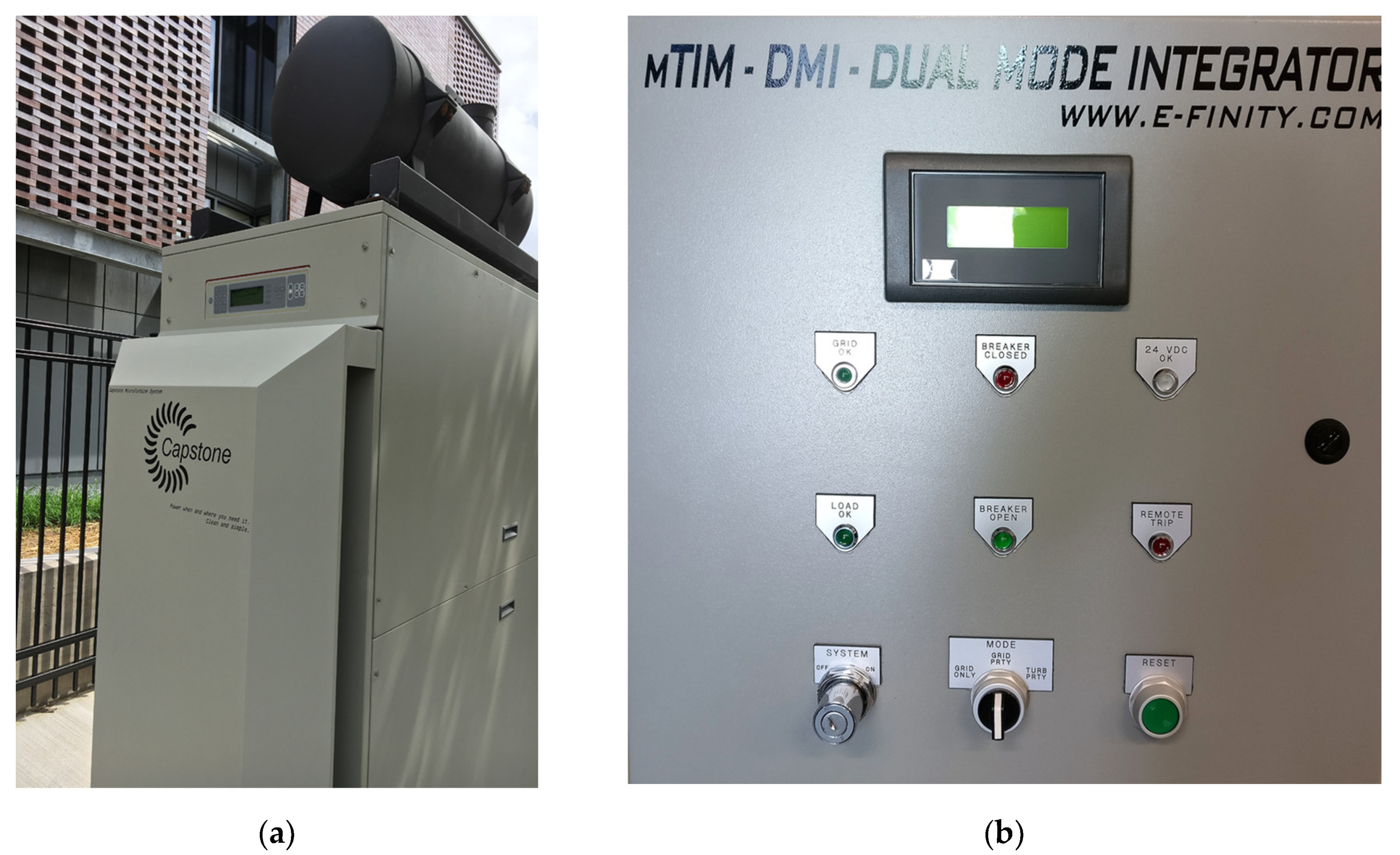
3.2.4. Microturbine
4. Implementing Control for a Building-Scale Microgrid
4.1. Microgrid Control Components, Their Function, and Interconnections
- Energy IQ Controller (Energy IQ, Boca Raton, FL, USA; The Microgrid Controller): Centralized SCADA site controller. A programmable Industrial PC [65] running an open driver-based and JAVA-based supervisory platform used in building automation systems (Niagara N4) [66] providing integration to various Modbus-based DER components, listed below.
- Dynapower Inverter Power Control System (PCS;South Burlington, VT, USA) [53]: The Modbus-based primary controller for the Dynapower inverter. The PCS is in charge of switching between its grid-connected and islanded modes of operation.
- Microturbine Interface Module (mTIM; E-Finity, Wayne, PA, USA) [67]: The Modbus-based primary controller for the Capstone microturbine. This component coordinates with the microturbine dual mode integrator (DMI) in charge of switching between its grid-connected and islanded modes of operation.
- elithion AllCell Battery Management System (BMS; elition, Boulder, CO, USA) [51]: The CAN bus-based primary controller for the AllCell lithium-ion battery energy storage system.
- Cellwatch PC Battery Management System (BMS; Cellwatch, Raleigh, NC, USA) [52]: The Modbus-based primary controller for the lead-acid battery energy storage system.
- JACE controller (Tridium, Richmond, VA, USA) [66]: The BACnet-based controller/server for the Building Automation System (BAS).
4.2. Data and Command Flow between Controller and Components
4.3. Implementation of Lowest Layer: CERTS Autonomous Layer
4.4. Implementation of the Dispatch and Optimizer Layers
4.4.1. Control of Microgrid Operational Modes
4.4.2. Inverter Operating Modes
4.4.3. Microturbine Operating Modes
4.5. Testing Hierarchical Control
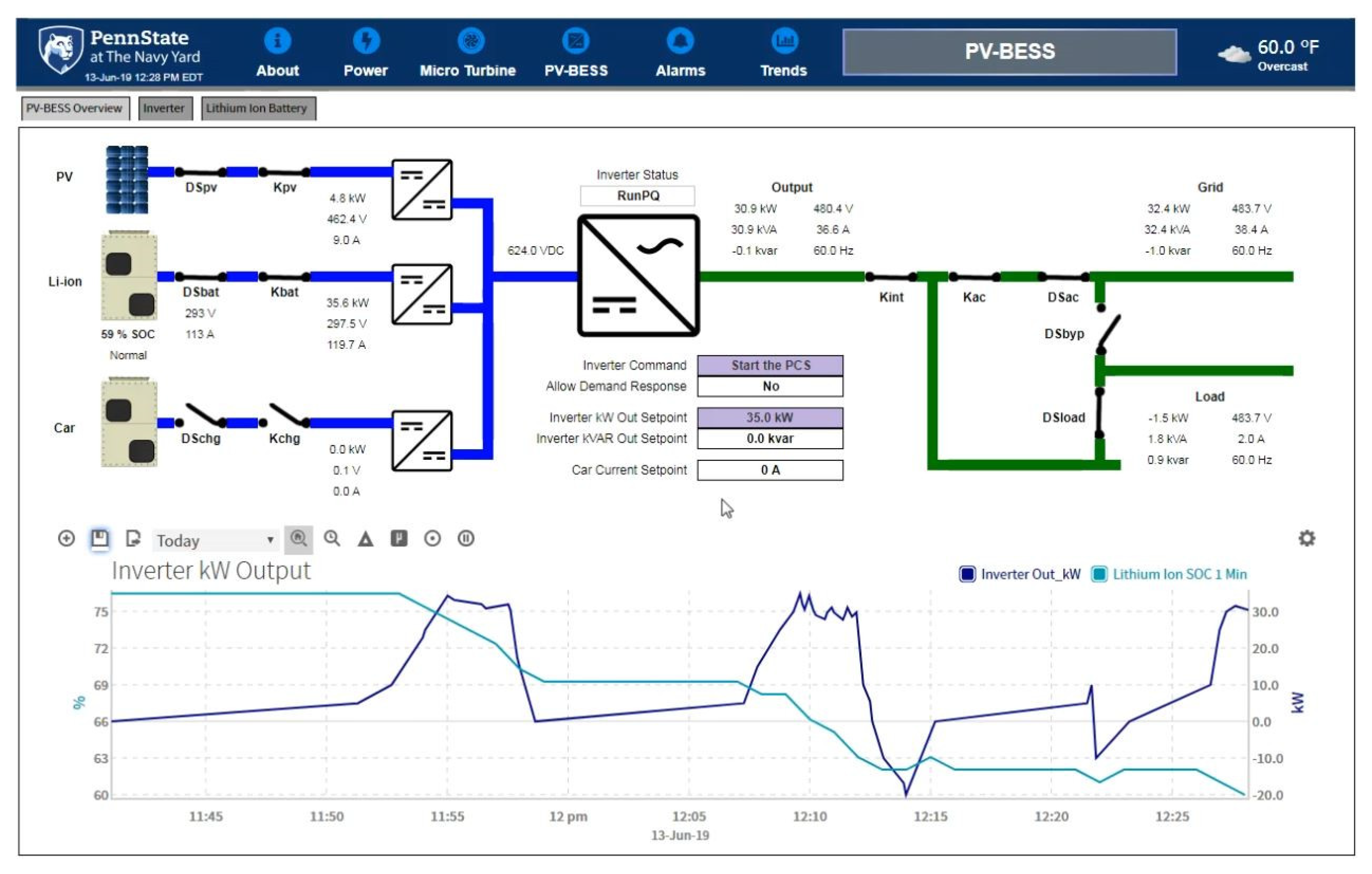
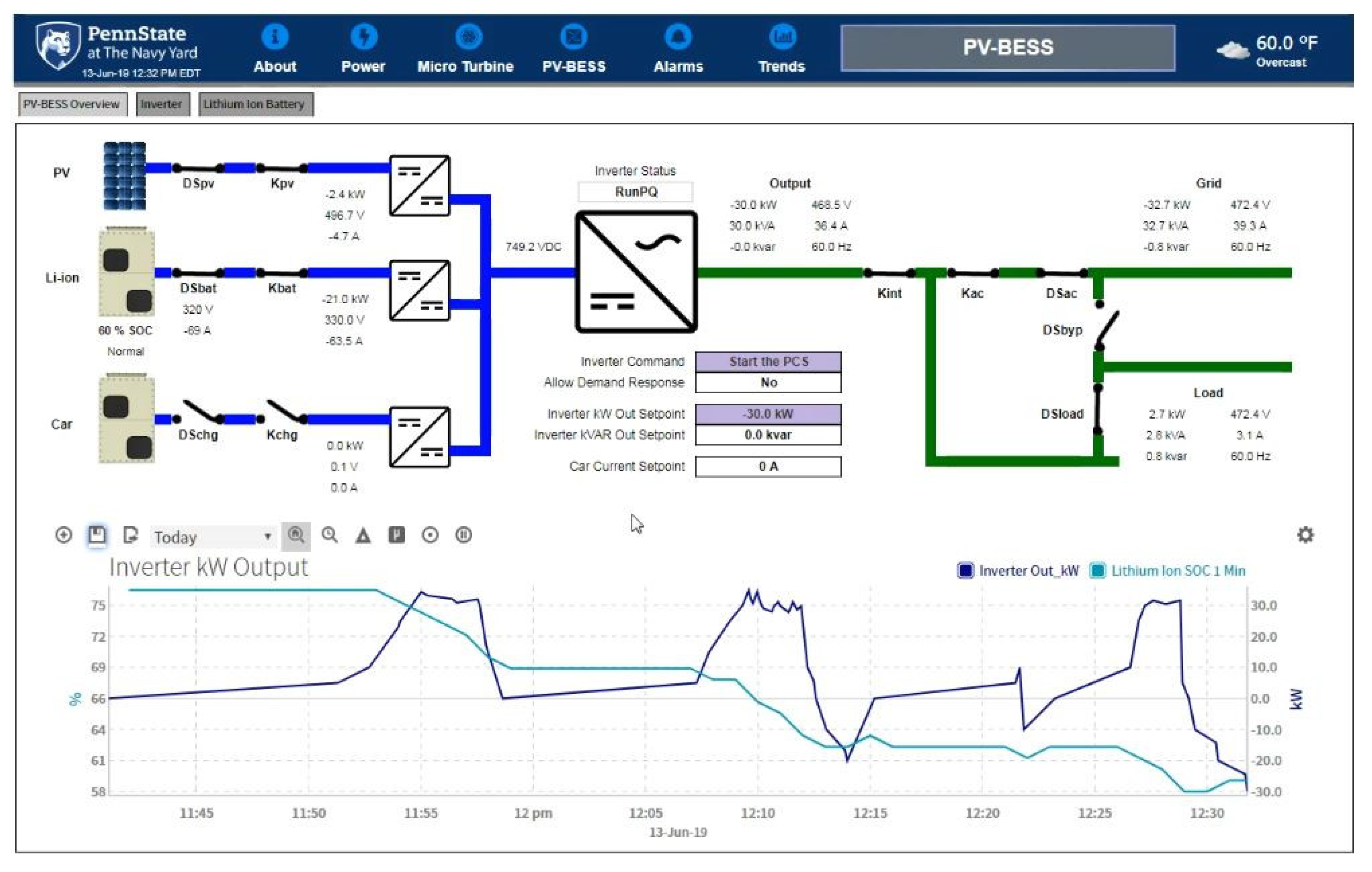
4.5.1. Experiment 1: Dispatch Layer (Solar PV + Storage Inverter)
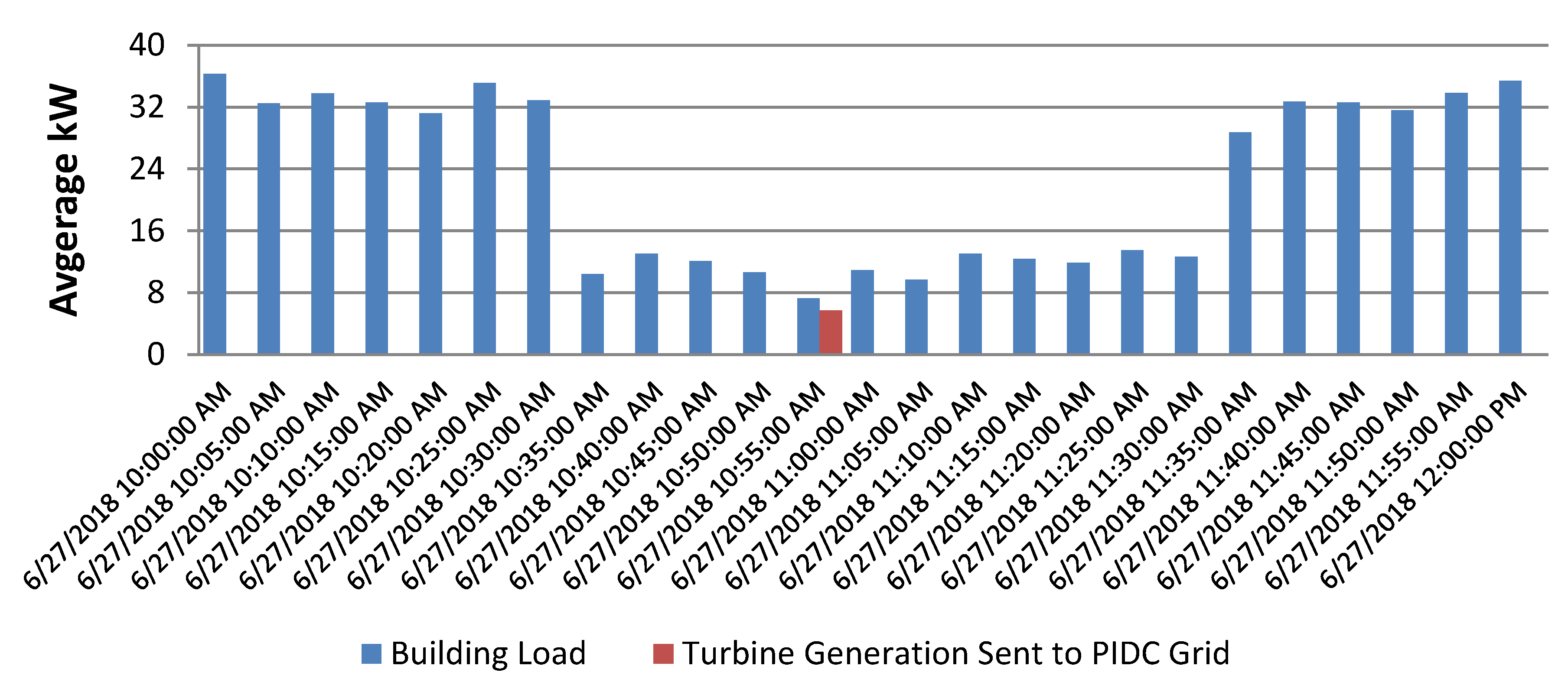
4.5.2. Experiment 2: Dispatch Layer (Microturbine)
5. Simulation of Optimized Dispatch for Demand Charge Reduction
5.1. Maximum Battery Discharge and Charge Power
5.2. HOMER Grid Simulation
6. Conclusions
7. Future Directions
Author Contributions
Funding
Conflicts of Interest
References
- Microgrid Definitions. Available online: https://building-microgrid.lbl.gov/microgrid-definitions (accessed on 16 August 2019).
- Fu, Q.; Nasiri, A.; Solanki, A.; Bani-Ahmed, A.; Weber, L.; Bhavaraju, V. Microgrids: Architectures, Controls, Protection, and Demonstration. Electr. Power Compon. Syst. 2015, 43, 1453–1465. [Google Scholar] [CrossRef]
- U.S. Solar Photovoltaic System Cost Benchmark: Q1 2018. Available online: https://www.nrel.gov/docs/fy19osti/72399.pdf (accessed on 16 August 2019).
- Riley, D.; Wright, K.; Mohammadpour, A.; Delgoshaei, P. Challenges and Opportunities in Microgrid and Solar Photovoltaic System Construction. In Proceedings of the Construction Research Congress 2016, San Juan, PR, USA, 31 May–2 June 2016; pp. 1092–1101. [Google Scholar]
- Schittekatte, T.; Stadler, M.; Cardoso, G.; Mashayekh, S.; Sankar, N. The Impact of Short-Term Stochastic Variability in Solar Irradiance on Optimal Microgrid Design. IEEE Trans. Smart Grid 2018, 9, 1647–1656. [Google Scholar] [CrossRef]
- Wan, C.; Zhao, J.; Song, Y.; Xu, Z.; Lin, J.; Hu, Z. Photovoltaic and solar power forecasting for smart grid energy management. CSEE J. Power Energy Syst. 2015, 1, 38–46. [Google Scholar] [CrossRef]
- Bracale, A.; Caramia, P.; Carpinelli, G.; Di Fazio, A.; Ferruzzi, G. A Bayesian Method for Short-Term Probabilistic Forecasting of Photovoltaic Generation in Smart Grid Operation and Control. Energies 2013, 6, 733–747. [Google Scholar] [CrossRef] [Green Version]
- Chu, Y.; Pedro, H.T.C.; Li, M.; Coimbra, C.F.M. Real-time forecasting of solar irradiance ramps with smart image processing. Sol. Energy 2015, 114, 91–104. [Google Scholar] [CrossRef]
- Zhu, H.; Li, X.; Sun, Q.; Nie, L.; Yao, J.; Zhao, G. A Power Prediction Method for Photovoltaic Power Plant Based on Wavelet Decomposition and Artificial Neural Networks. Energies 2016, 9, 11. [Google Scholar] [CrossRef]
- Kaun, B.; Chen, S.; Willard, S. Integration Guidelines for Energy Storage: A Project Management Handbook for Distribution-Connected Energy Storage Developed by the Energy Storage Integration Council; Electric Power Research Institute: Palo Alto, CA, USA, 2015. [Google Scholar]
- Maitra, A. Microgrid Controller Requirements and Relationship with DMS; National Renewable Energy Laboratory: Golden, CO, USA, 2015. [Google Scholar]
- Riley, D.; Delgoshaei, P. Energy storage and microgrid construction. In Proceedings of the 6th CSCE-CRC International Construction Specialty Conference 2017—Held as Part of the Canadian Society for Civil Engineering Annual Conference and General Meeting 2017, Vancouver, BC, Canada, 31 May–1 June 2017; pp. 572–581. [Google Scholar]
- Hampson, A.; Rackley, J. Guide to Using Combined Heat and Power for Enhancing Reliability and Resiliency in Buildings; ICF International: Vairfax, VA, USA, 2013. [Google Scholar]
- Mid-Atlantic CHP Technical Assistance Partnership. Available online: https://betterbuildingssolutioncenter.energy.gov/chp/mid-atlantic-chp-technical-assistance-partnership (accessed on 16 August 2019).
- Alegria, E.; Ma, A.; Idrees, O. Certs Microgrid Demonstration with Largescale Energy Storage and Renewables at Santa Rita Jail; Chevron Energy Services Company: San Ramon, CA, USA, 2014. [Google Scholar]
- Bose, S. Smart Microgrid Energy Management Controls for Improved Energy Efficiency and Renewables Integration at DoD Installations; GE Global Research: Niskayuna, NY, USA, 2013. [Google Scholar]
- Bose, S.; Krok, M. Microgrid Design, Development and Demonstration; GE Global Research Center: Niskayuna, NY, USA, 2011. [Google Scholar]
- Lasseter, R.H.; Eto, J.H.; Schenkman, B.; Stevens, J.; Vollkommer, H.; Klapp, D.; Linton, E.; Hurtado, H.; Roy, J. CERTS Microgrid Laboratory Test Bed. IEEE Trans. Power Deliv. 2011, 26, 325–332. [Google Scholar] [CrossRef]
- Panora, R.; Gehret, J.E.; Furse, M.M.; Lasseter, R.H. Real-World Performance of a CERTS Microgrid in Manhattan. IEEE Trans. Sustain. Energy 2014, 5, 1356–1360. [Google Scholar] [CrossRef]
- Paquette, A.; Harley, R.; Bhavaraju, V.; Krstic, S.; Theisen, P. Design of the Fort Sill Microgrid. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014. [Google Scholar]
- Mienski, R.; Pawelek, R.; Wasiak, I.; Gburczyk, P. Monitoring and Control Systems for Testing Microgrids Operation on the Example of Laboratory of Distributed Generation at the Technical University of Lodz. In Proceedings of the 2009 10th International Conference on Electrical Power Quality and Utilisation, Lodz, Poland, 15–17 September 2009. [Google Scholar]
- Pawelek, R.; Wasiak, I.; Gburczyk, P.; Mienski, R. Study on Operation of Energy Storage in Electrical Power Microgrid—Modeling and Simulation. In Proceedings of the 14th International Conference on Harmonics and Quality of Power—ICHQP 2010, Bergamo, Italy, 26–29 September 2010. [Google Scholar]
- Torres, E.; Larragueta, J.M.; Eguía, P.; Mazón, J.; San Martín, J.I.; Zamora, I. Dynamic performance of a microturbine connected to a low voltage network. Renew. Energy Power Qual. J. 2008, 1, 468–473. [Google Scholar] [CrossRef]
- Wasiak, I.; Pawelek, R.; Mienski, R.; Gburczyk, P. Using Energy Storage for Energy Management and Load Compensation in LV Microgrids. In Proceedings of the 2012 IEEE 15th International Conference on Harmonics and Quality of Power, Hong Kong, China, 17–20 June 2012. [Google Scholar]
- Engler, A.; Osika, O.; Barnes, M.; Jenkins, N.; Arulampalam, A. Large Scale Integration of Micro-Generation to Low Voltage Grids; University of Kassel: Kassel, Germany, 2004. [Google Scholar]
- Mahmoud, M. Microgrid; Elsevier: Oxford, UK, 2016. [Google Scholar]
- Agile Digital Substations 2.0 Handbook; Alstom: Saint-Ouen, France, 2015.
- DS Agile A301 Substation Gateway; Alstom: Saint-Ouen, France, 2014.
- Duke Energy Builds Microgrid Control System with Standard Power System Components; Schweitzer Engineering Laboratories: Pullman, WA, USA, 2017.
- Li, Y.; Nejabatkhah, F. Overview of control, integration and energy management of microgrids. J. Mod. Power Syst. Clean Energy 2014, 2, 212–222. [Google Scholar] [CrossRef] [Green Version]
- Olivares, D.E.; Mehrizi-Sani, A.; Etemadi, A.H.; Canizares, C.A.; Iravani, R.; Kazerani, M.; Hajimiragha, A.H.; Gomis-Bellmunt, O.; Saeedifard, M.; Palma-Behnke, R.; et al. Trends in Microgrid Control. IEEE Trans. Smart Grid 2014, 5, 1905–1919. [Google Scholar] [CrossRef]
- Bidram, A.; Davoudi, A. Hierarchical Structure of Microgrids Control System. IEEE Trans. Smart Grid 2012, 3, 1963–1976. [Google Scholar] [CrossRef]
- Du, W.; Jiang, Q.; Erickson, M.J.; Lasseter, R.H. Voltage-Source Control of PV Inverter in a CERTS Microgrid. IEEE Trans. Power Deliv. 2014, 29, 1726–1734. [Google Scholar] [CrossRef]
- Hoogenboezem, J. Distributed Network Protocols—The Old and the New DNP3, IEC 60870-5 and IEC 61850. Available online: https://pdfs.semanticscholar.org/dd4b/7f2f9a3b1203137ec8dd039430d1389fac39.pdf (accessed on 20 September 2019).
- EtherNet/IP to IEC60870-5-104 Client Communication Gateway. Available online: https://www.prosoft-technology.com/Products/Gateways/EtherNet-IP/EtherNet-IP-to-IEC60870-5-104-Client-Communication-Gateway (accessed on 20 September 2019).
- Maitra, A.; Simmins, J. Grid Interactive Microgrid Controllers and the Management of Aggregated Distributed Energy Resources (DER); Electric Power Research Institute: Palo Alto, CA, USA, 2015. [Google Scholar]
- Wang, J.; Lu, X.; Chen, C. Guidlines for Implementing Advanced Distribution Management Systems: Requirements for DMS Integration with DERMS and Microgrids; U.S. Department of Energy: Washington, DC, USA, 2015. [Google Scholar]
- Mlynek, P.; Misurec, J.; Fujdiak, R.; Kolka, Z.; Pospichal, L. Heterogeneous networks for smart metering–power line and radio communication. Elektronika Ir Elektrotechnika 2015, 21, 85–91. [Google Scholar] [CrossRef]
- Li, Y.; Cheng, X.; Cao, Y.; Wang, D.; Yang, L. Smart Choice for the Smart Grid: Narrowband Internet of Things (NB-IoT). IEEE Internet Things 2018, 5, 1505–1515. [Google Scholar] [CrossRef]
- The IEC and Cyber Security. Available online: https://blog.iec.ch/2018/09/the-iec-and-cyber-security-management-structure (accessed on 20 September 2019).
- Fujdiak, R.; Mlynek, P.; Blazek, P.; Barabas, M.; Mrnustik, P. Seeking the relation between performance and security in modern systems: Metrics and measures. In Proceedings of the 41st International Conference on Telecommunications and Signal Processing (TSP), Athens, Greece, 4–6 July 2018. [Google Scholar]
- Sohn, J.-M.; Yun, S.-Y. Software Functional Requirements and Architectures of Microgrid Energy Management System. Kepco J. Electr. Power Energy 2016, 2, 269–272. [Google Scholar] [CrossRef] [Green Version]
- The Center for Building Energy Science (Building 661)—CBEI Headquarters. Available online: http://cbei.psu.edu/the-center-for-building-energy-science-building-661-cbei-headquarters/ (accessed on 16 August 2019).
- Consortium for Building Energy Innovation—CBEI: Solving Regional Energy Innovation. Available online: https://www.pidcphila.com/impact/success-stories/success-stories-detail/consortium-for-building-energy-innovation-cbei (accessed on 16 August 2019).
- Pennsylvania State University GridSTAR Center: Smart Grid Training and Application Resource Center. Available online: https://www.smartgrid.gov/project/pennsylvania_state_university.html (accessed on 16 August 2019).
- Combined Heat and Power (CHP)-Enabled Renewable, Distributed Energy Technology in a Micro-Grid via Leveraged Use of Pennsylvania Marcellus Shale Gas. Available online: https://www.dep.pa.gov/Business/Energy/OfficeofPollutionPrevention/State-Energy-Plan/Pages/CHP_and_Micro-Grid_Technology.aspx (accessed on 16 August 2019).
- How can we demonstrate best practices for energy efficiency that can be affordably replicated in buildings across the country? Available online: https://kierantimberlake.com/pages/view/196/consortium-for-building-energy-innovation (accessed on 20 September 2019).
- ISOFTON Monocrystalline Module Isf-260. Available online: https://www.altestore.com/static/datafiles/Others/Isofoton%20ISF-250%20Mono%20Datasheet%20USA.pdf (accessed on 16 August 2019).
- What Is a Combiner Box? Available online: https://www.solarpowerworldonline.com/2015/06/what-is-a-combiner-box/ (accessed on 16 August 2019).
- NexSys Technical Manual. Available online: https://www.enersys.com/NexSys/ (accessed on 16 August 2019).
- 38 kWh Li-ion Battery System Technical Datasheet. Available online: http://www.allcelltech.com/index.php/products/battery-packs (accessed on 16 August 2019).
- Cellwatch Battery Monitoring System Installation Manual. Available online: http://www.cellwatch.com/manuals/manual.pdf?utm_source=newsletter (accessed on 16 August 2019).
- 50 KW MULTI PORT PCS MANUAL Model Number: EMS-7-M00561VNF. Available online: https://www.dynapower.com/products/energy-storage-solutions/dc-coupled-utility-scale-solar-plus-storage (accessed on 16 August 2019).
- Combined Heat and Power Technology Fact Sheet Series. Available online: https://www.energy.gov/sites/prod/files/2016/09/f33/CHP-Microturbines_0.pdf (accessed on 16 August 2019).
- Capstone MicroTurbine Model C65 User’s Manual. Available online: https://www.capstoneturbine.com/products/c65 (accessed on 16 August 2019).
- Product Specification Model C65—Capstone MicroTurbine. Available online: https://www.capstoneturbine.com/products/c65 (accessed on 16 August 2019).
- Capstone Technical Reference Dual Mode System Controller (DMSC). Available online: https://www.capstoneturbine.com/products/c65 (accessed on 16 August 2019).
- Bialek, T. Borrego Springs Microgrid Demonstration Project; California Energy Commission: San Diego, CA, USA, 2013. [Google Scholar]
- Heckmann, W. Overview of Microgrids in Europe. In Proceedings of the Niagara 2016 Symposium on Microgrids, Niagara-on-the-Lake, ON, Canada, 20–21 October 2016. [Google Scholar]
- Microgrids for Critical Facility Resiliency in New York State; New York State Energy Research and Development Authority: Albany, NY, USA, 2014.
- Wiegman, H. Microgrid Plant Control Design and Development; GE Global Research: Niskayuna, NY, USA, 2017. [Google Scholar]
- Zadeh, M.R.D.; Hajimiragha, A.; Adamiak, M.; Palizban, A.; Allan, S. New Control and Automation System for an Islanded Microgrid with Energy Storage Systems. In Proceedings of the 2011 IEEE PES Conference on Innovative Smart Grid Technologies—Middle East, Jeddah, Saudi Arabia, 17–20 December 2011. [Google Scholar]
- ProtoGen Distributed Energy Consulting, Training, and Technical Services. Available online: https://protogenenergy.com/ (accessed on 16 August 2019).
- Bushby, S.T. Back to the Basics about BACnet; National Institute of Standards and Technology: Gaithersburg, MD, USA, 1993. [Google Scholar]
- Energy IQ Advanced Energy Solutions. Available online: https://energyiq.com/en/ (accessed on 16 August 2019).
- Niagara Framework Compatible Drivers and Applications. Available online: https://www.tridium.com/~/media/tridium/library/documents/collateral/brochures/niagara%20compatible%20drivers%20and%20applications_jan%202019.ashx?la=en (accessed on 16 August 2019).
- Microturbine Interface Module (mTIM). Available online: http://www.e-finity.com/products/brochures/ControlSystem_ERMS_lowres.pdf (accessed on 16 August 2019).
- Eaton Circuit Protection & Control Products. Available online: https://www.eaton.com/ecm/groups/public/@pub/@seasia/@elec/documents/content/pct_1199597.pdf (accessed on 16 August 2019).
- Operation and Maintenance Manual, Automatic Transfer Switch Controller, ATC-900. Available online: https://www.eaton.com/content/dam/eaton/products/low-voltage-power-distribution-controls-systems/ats/resources/atsc9-ib140012en.pdf (accessed on 16 August 2019).
- SEL-547 Distributed Generator Interconnection Relay. Available online: https://selinc.com/products/547/ (accessed on 16 August 2019).
- Delgoshaei, P.; Heidarinejad, M.; Xu, K.; Wentz, J.R.; Delgoshaei, P.; Srebric, J. Impacts of building operational schedules and occupants on the lighting energy consumption patterns of an office space. Build. Simul. 2017, 10, 447–458. [Google Scholar] [CrossRef]
- Manwell, J.; McGowan, J.; Baring-Gould, E.; Leotta, A. Evaluation of battery models for wind/hybrid powersystem simulation. In Proceedings of the fifth European Wind Energy Association Conference (EWEC ’94), Thessaloniki, Greece, 10–14 October 1994; pp. 1182–1187. [Google Scholar]
- HOMER Grid 1.5 Manual. Available online: https://www.homerenergy.com/products/grid/docs/latest/index.html (accessed on 16 August 2019).
- HOMER Pro 3.13 Manual. Available online: https://www.homerenergy.com/products/pro/docs/latest/index.html (accessed on 16 August 2019).
- Lambert, T.; Gilman, P.; Lilienthal, P. Micropower System Modeling with HOMER. In Integration of Alternative Sources of Energy; Farret, F.A., Simoes, M.G., Eds.; John Wiley & Sons: Hoboken, NJ, USA, 2006; pp. 379–418. [Google Scholar]
- GENABILITY Tariff APIs. Available online: https://developer.genability.com/api-reference/tariff-api/ (accessed on 16 August 2019).
- Pavlak, G.S.; Henze, G.P.; Cushing, V.J. Optimizing commercial building participation in energy and ancillary service markets. Energy Build. 2014, 81, 115–126. [Google Scholar] [CrossRef]
- Jiang, Q.; Xue, M.; Geng, G. Energy Management of Microgrid in Grid-Connected and Stand-Alone Modes. IEEE Trans. Power Syst. 2013, 28, 3380–3389. [Google Scholar] [CrossRef]
- Hooshmand, A.; Asghari, B.; Sharma, R.K. Experimental Demonstration of a Tiered Power Management System for Economic Operation of Grid-Tied Microgrids. IEEE Trans. Sustain. Energy 2014, 5, 1319–1327. [Google Scholar] [CrossRef]
- Jafari, M.; Malekjamshidi, Z.; Zhu, J.; Khooban, M.H. A Novel Predictive Fuzzy Logic-Based Energy Management System for Grid-connected and Off-grid Operation of Residential Smart Micro-grids. IEEE J. Emerg. Sel. Top. Power Electron. 2018. [Google Scholar] [CrossRef]
- Kydd, P.H.; Martin, C.A.; Komara, K.J.; Delgoshaei, P.; Riley, D. Vehicle-Solar-Grid Integration II: Results in Simulated School Bus Operation. IEEE Power Energy Technol. Syst. J. 2016, 3, 198–206. [Google Scholar] [CrossRef]
- Marnay, C.; Venkataramanan, G.; Stadler, M.; Siddiqui, A.S.; Firestone, R.; Chandran, B. Optimal Technology Selection and Operation of Commercial-Building Microgrids. IEEE Trans. Power Syst. 2008, 23, 975–982. [Google Scholar] [CrossRef]
- Stadler, M.; Marnay, C.; DeForest, N.; Eto, J.; Cardoso, G.; Klapp, D.; Lai, J. Web-Based Economic and Environmental Optimization of Microgrids. In Proceedings of the 2012 IEEE PES Innovative Smart Grid Technologies (ISGT), Washington, DC, USA, 16–18 January 2012. [Google Scholar]





















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Delgoshaei, P.; Freihaut, J.D. Development of a Control Platform for a Building-Scale Hybrid Solar PV-Natural Gas Microgrid. Energies 2019, 12, 4202. https://doi.org/10.3390/en12214202
Delgoshaei P, Freihaut JD. Development of a Control Platform for a Building-Scale Hybrid Solar PV-Natural Gas Microgrid. Energies. 2019; 12(21):4202. https://doi.org/10.3390/en12214202
Chicago/Turabian StyleDelgoshaei, Parhum, and James D. Freihaut. 2019. "Development of a Control Platform for a Building-Scale Hybrid Solar PV-Natural Gas Microgrid" Energies 12, no. 21: 4202. https://doi.org/10.3390/en12214202