In this section, the wind data measured by the LiDAR is compared against the measurements from the sonic and cup anemometers for the period of one year from April 2018 through March 2019. First of all, comparisons of the mean wind speed and the turbulence intensity measured by the three devices for the entire year is discussed. Considering the fact that the peak wind speed is required for the estimation of the extreme load experienced by wind turbines, the accuracy of LiDAR-measured peak wind speeds is presented next. Finally, the section discusses the effect of terrain on LiDAR-measured wind speeds.
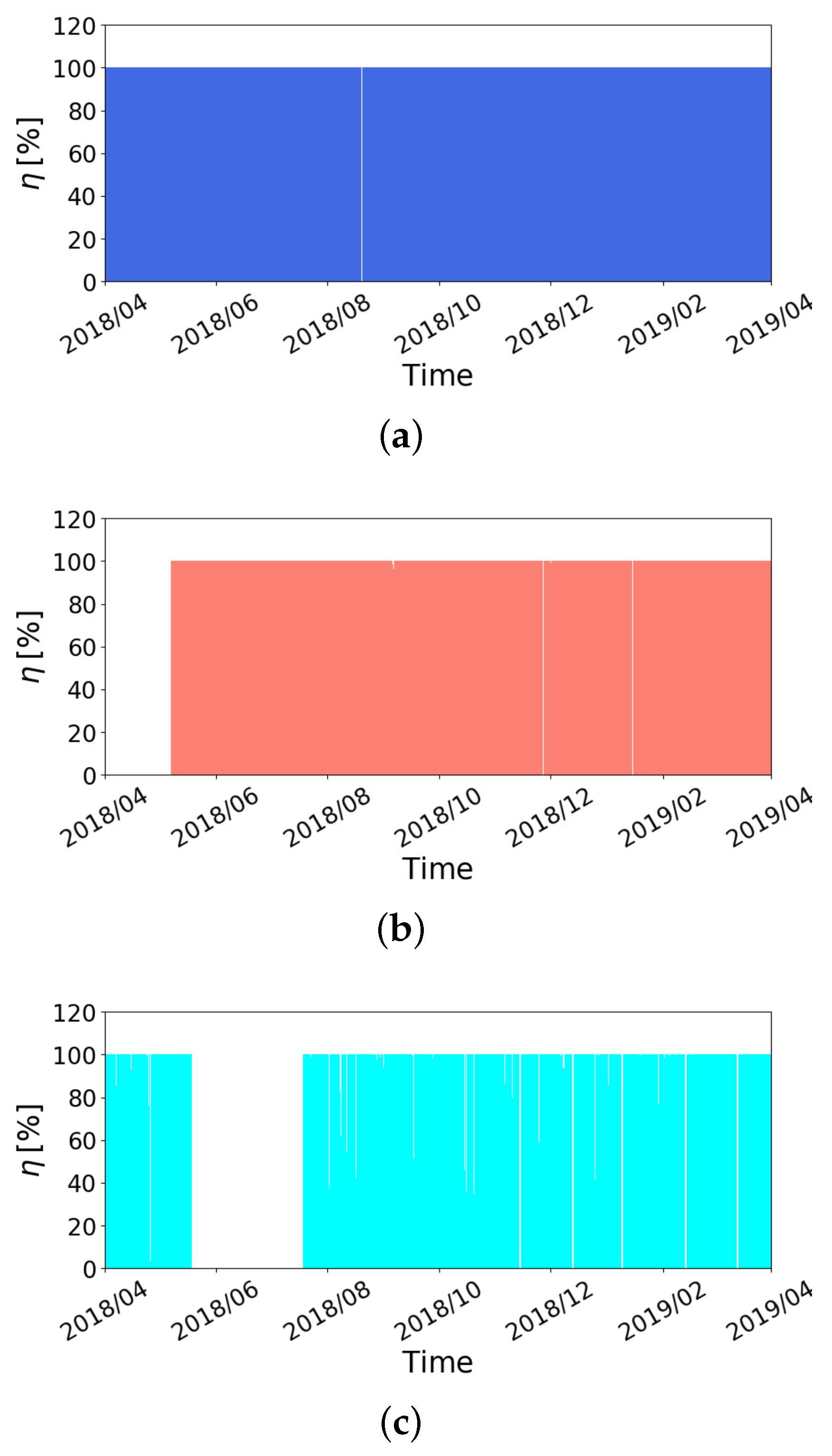
For the cup anemometer, the availability was mostly 100%, though there were occasions with 0% availability. Due to the concentration of the large number of data points in
Figure 4a, the time slots with
are not visible. For the sonic anemometer, the data acquisition system at the meteorological mast had trouble and it could not store the measured wind data until the first week of May 2018. Consequently, the availability was 0% for this period. Regarding the LiDAR, it was sent for maintenance from May 18 through July 18 and thus, the availability for this period was 0%. Although
was mostly 100% when the LiDAR was operating, there were occasions when the LiDAR was unable to measure the wind speed (i.e.,
) or the availability
was less than 100%. Note that the maximum number of 10-min data that a device can collect in a one-year time period is 52,560. However, in order to collect the maximum number of data, a device has to operate ideally for the entire year, which is not possible, and measurement devices usually collect less data. For example, the number of actually measured 10-min average data for the cup anemometer is 46,970. The availability of this 10-min averaged data (
) can be defined as:
where
is the actual number of 10-min average data and
is the maximum possible number of 10-min average data that can be collected in the given period. This makes the yearly availability of the cup anemometer equal to 89%. The missing data of roughly 10% is difficult to observe in
Figure 4a, since a large amount of data from the one year period is concentrated in this figure. Similarly, the yearly availability of the sonic anemometer and the V2 LiDAR are 81% and 75% respectively. It was possible to compare and analyze data from a shorter measurement campaign when all three devices were operating perfectly and were able to collect measurements with
. This was done in many earlier studies. However, operational issues and problems are commonplace in field measurements, especially when the measurements are conducted for longer periods. Therefore, the current study also considers those periods when data was not collected by one or more devices.
3.1. Mean Wind Speed and Turbulence Intensity
This section presents the 10-min average wind speed, standard deviation and turbulence intensity measured by the sonic anemometers, the cup anemometers and the profiling LiDAR. The study uses sonic anemometers as reference devices because of their high sampling rate and because they are the preferred device in measurements of atmospheric turbulence [
20,
23]. As stated earlier, comparisons are conducted using data collected for a period of one year. Furthermore, the minimum threshold of data availability (
) for the LiDAR and sonic anemometers is set to 80% throughout the study. Experience shows that LiDAR data with lower availability contribute to an increase in uncertainty and to a reduction in the overall data quality.
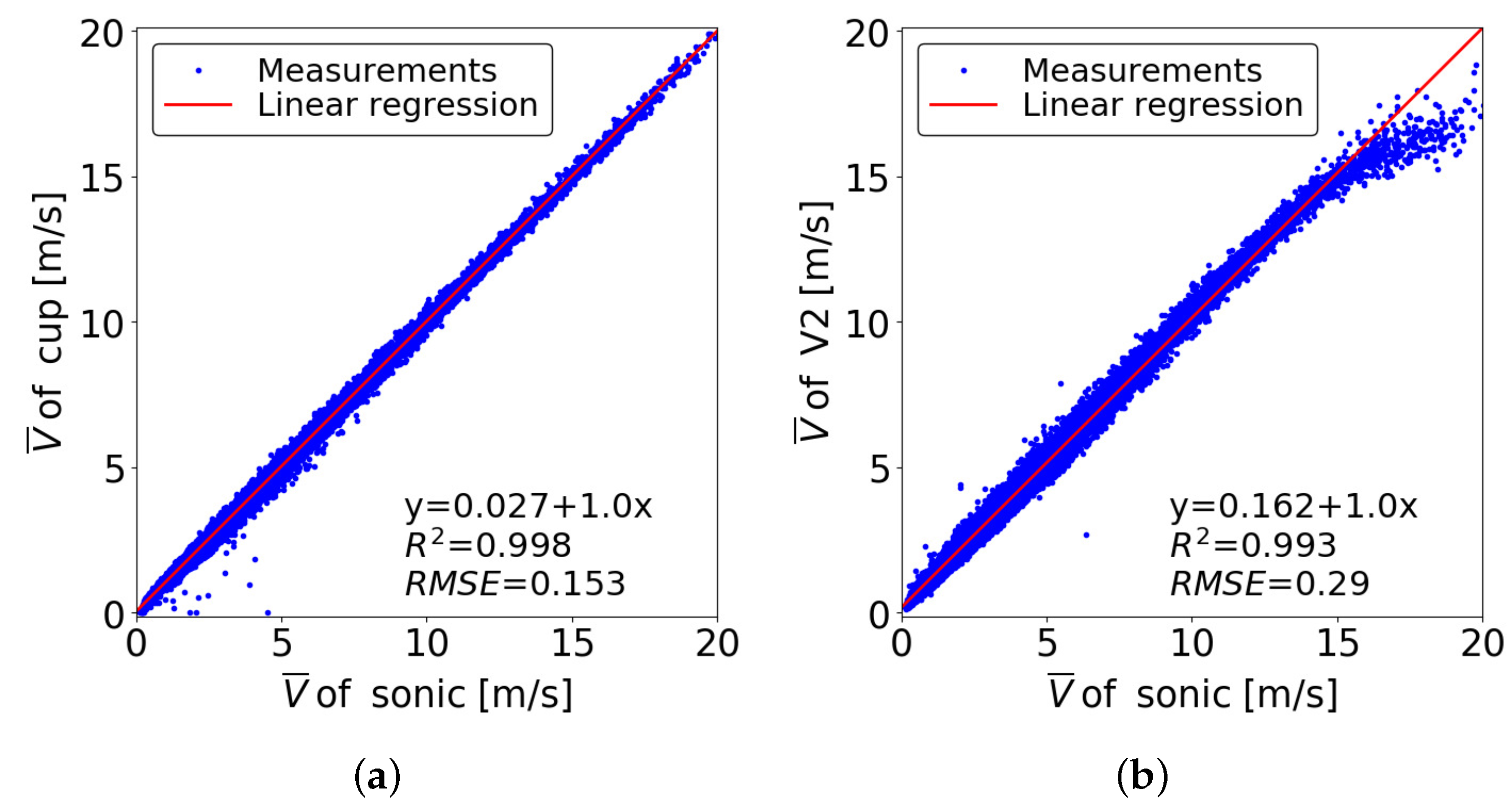
Figure 5 presents a comparison of 10-min averaged horizontal velocities (
) measured by the cup anemometer and the V2 LiDAR against measurements collected by the sonic anemometer at 40 m height. Here,
is defined by
where
and
are the instantaneous horizontal velocity in the continuous and discrete form,
T is the average time period (10 min in this study), and
is the total number of data in the 10-min time period. While the cup anemometer directly measures
, for the sonic anemometer and the LiDAR,
is computed using
, where
and
are wind speed components in the west to east and south to north directions, respectively. Comparison between the cup and sonic anemometers in
Figure 5a shows good agreement. The regression line obtained from linear least squares fitting indicates the uncertainties in the comparison. The slope of the line is 1.0, while the offset is 0.022 m/s. Coefficient of determination
of 0.998 can be considered to be significantly high. There are a few outliers for lower wind speeds, i.e., when
from the sonic anemometer is less than 5 m/s. This may be due to the fact that uncertainties in the cup anemometer measurement is higher for lower wind speeds. Nevertheless, even at lower wind speeds, the overall agreement between the cup anemometer and the sonic anemometer is fairly good. Note that the number of data pairs used for this comparison is 40375. Comparison between the V2 LiDAR and the sonic anemometer in
Figure 5b shows a larger variation, although the slope of the regression line is still 1.0 and
is 0.993 which is still quite high. Conspicuous differences between the LiDAR and the sonic anemometer measurements can be observed at higher wind speeds, i.e.,
of the sonic anemometer is larger than 15 m/s. The LiDAR-measured wind speeds are lower at higher wind speeds for this height. One possible reason that was initially considered was that the site experiences high wind speeds predominantly in winter when snowfall is frequent. Because the horizontal speed of snow would usually be lower than the actual wind speed, the laser beam reflected from the snow particles would show a lower wind speed. However, this underestimation in LiDAR measurement is not observed from the comparison of wind speed at 57 m height (cf. Figure 9a). Another source of this discrepancy could be due to interference of the tower wake. However, this would have reduced the wind speed of the sonic anemometer and not the LiDAR. However, the agreement between the LiDAR and the sonic anemometer, with respect to the mean wind speed, is acceptable. The number of data pairs in this comparison is 30,959, which is approximately 10,000 less than for the sonic anemometer and cup anemometer comparison. This is due to the lower data availability of the LiDAR measurement.
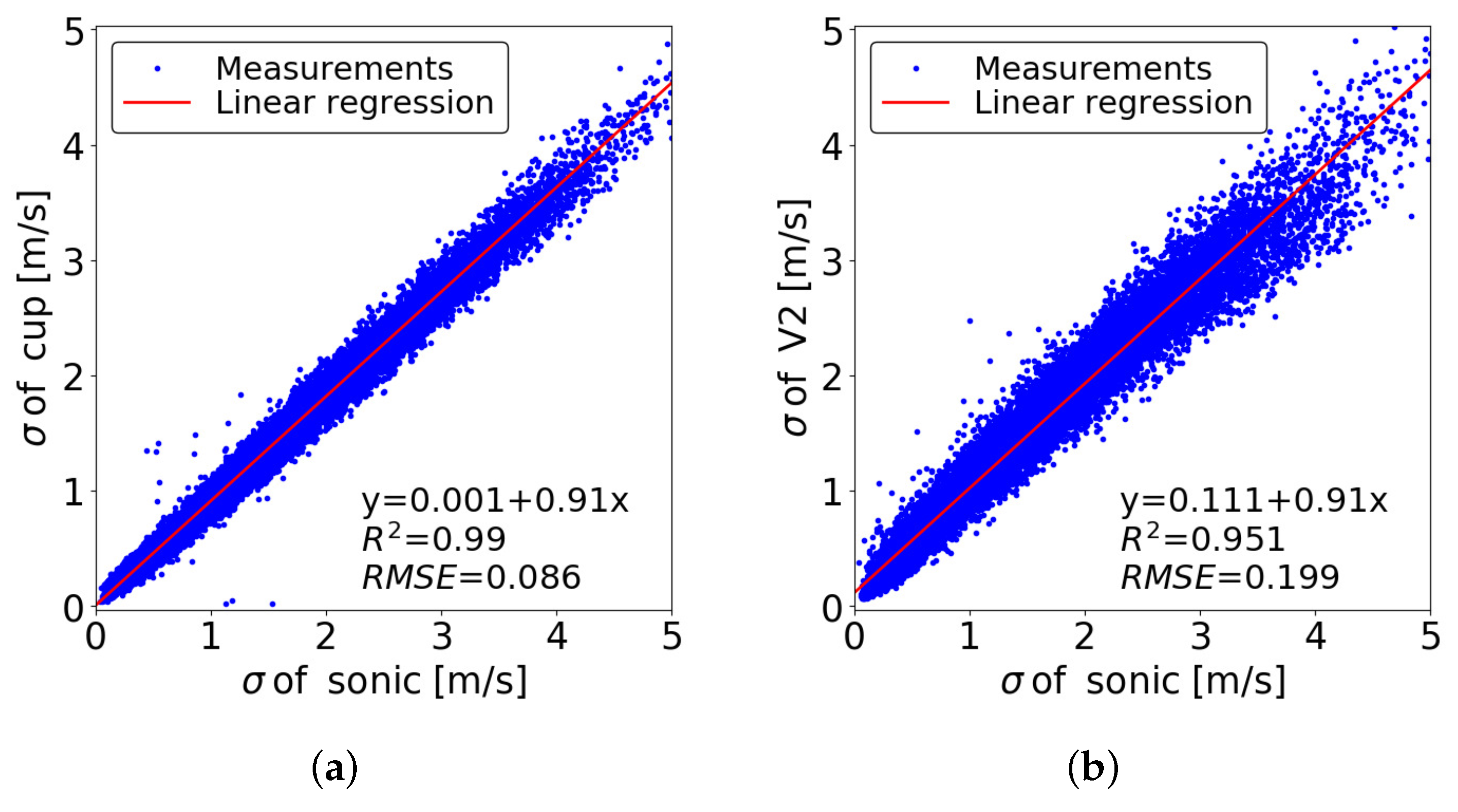
Figure 6 presents a comparison of the standard deviation of the horizontal velocities measured by the cup anemometer and the V2 LiDAR against the measurements collected by the sonic anemometer at 40 m height. The variation in the comparison of the standard deviation is higher than that for the mean wind speed. This larger difference comes from the definition of the standard deviation (
), which is the square root of the second central moment of velocity, i.e.,
The square of the velocity fluctuation in
means the differences between the
measured by the two devices will also be larger compared to the mean wind speed. The slope and offset of the regression line from the cup and sonic anemometers comparison are 0.91 and 0.001 respectively, while
is 0.99. As it is clear from
Figure 6b, the standard deviation from the LiDAR has a larger variation compared to the sonic anemometer; the slope, offset and
are 0.91, 0.107 and 0.952 respectively. The variation in the LiDAR and the sonic anemometer comparison increases with increasing
. Earlier studies also showed the same degree of difference or larger difference between LiDAR and conventional wind speed sensors like cup or sonic anemometers (see e.g., Sathe & Mann [
14,
15]). However, the measurement periods in earlier studies were very short–from a few days to one or two months. It should be noted that statistics related to uncertainty obtained from Linear regression are not very meaningful for a long term comparison. For example, the relation for the regression line indicates that the LiDAR should under-estimate the
values when compared against sonic anemometer measurements larger than 1.19 m/s. However, the distribution is spread over a large band. This may be because of the variety of atmospheric conditions—including the stability—that the site experiences during a long-term comparison as performed in the current study. Thus, the least square fitting or the coefficient of determination are not sufficient to quantify the performance of LiDAR for their long term deployment.
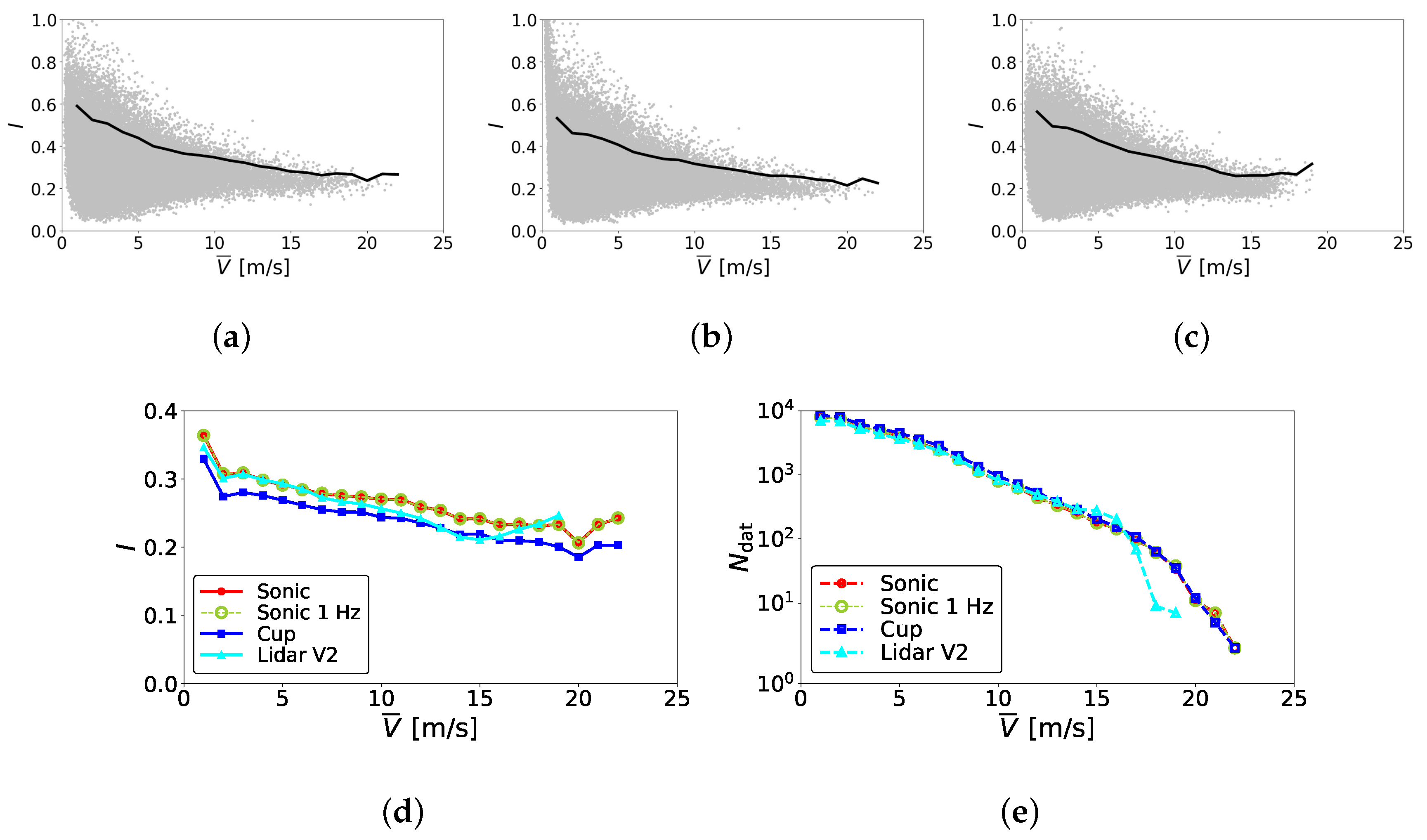
Figure 7 presents the distribution of turbulence intensity as a function of mean wind speed. Turbulence intensity (
I) is defined by
Measurements from all three instruments show a similar trend; the higher turbulence intensities occur during lower wind speeds and they gradually decrease with increasing mean wind speed. Furthermore, variation of the turbulence intensity is larger when the wind speed is low. Variation is particularly large for the cup anemometer measurements with too many points close to or even larger than
, but it should be noted that the measurements from cup anemometer as well as from LiDAR are not very reliable when the wind speed is low. Regarding the LiDAR, the turbulence intensities are mainly concentrated below
even at the lowest mean wind speed. Although not presented explicitly in the paper, the 90th percentile line of the LiDAR data shows better agreement than that of the cup anemometer data when compared against the sonic anemometer measurement.
Figure 7d shows the bin-averaged turbulence intensities for mean wind speed bins of size 1 m/s, and
Figure 7e shows the number of turbulence intensity data per bin. Among the three instruments, the cup anemometer has the lowest turbulence intensity for almost all wind speed bins. The LiDAR-measured turbulence intensities overlap with the sonic anemometer-measured data when the wind speed is low. However, the bin-averaged turbulence intensity of the LiDAR gradually decreases for higher mean wind speeds. This tendency contradicts with a similar comparison by Bot [
21], who showed that LiDAR-measured turbulence intensities were usually larger than or similar to the sonic anemometer-measured data. It should be mentioned however, that the maximum number of 10-min data sets per bin in their investigation was between 1000 to 2500, whereas in the current study, the maximum number of data per bin is close to 10,000 and there are more than 1000 data sets in each bin up to 10 m/s (cf.
Figure 7e). Nevertheless, neither earlier studies nor the current study can describe the general trend regarding the magnitude of turbulence intensities measured by these three devices. For example, as discussed below, the bin-averaged turbulence intensities at a higher altitude of 57 m are larger for the LiDAR than for the sonic anemometer for most of the mean wind speed range (cf. Figure 10). The turbulence intensities measured by these three devices depend on the altitude, terrain as well as atmospheric conditions. One thing that can be stated with certainty is that LiDAR-measured turbulence intensity shows better agreement with sonic anemometer data than does cup anemometer data. As a result, the fatigue load that a wind turbine may experience, computed using LiDAR-measured turbulence intensity, will be more reliable than that estimated using cup anemometer measurements. The lower turbulence levels measured by a cup anemometer are attributed to the longer response time related to its inertia arising from the moving components such as cups and horizontal arms [
29].
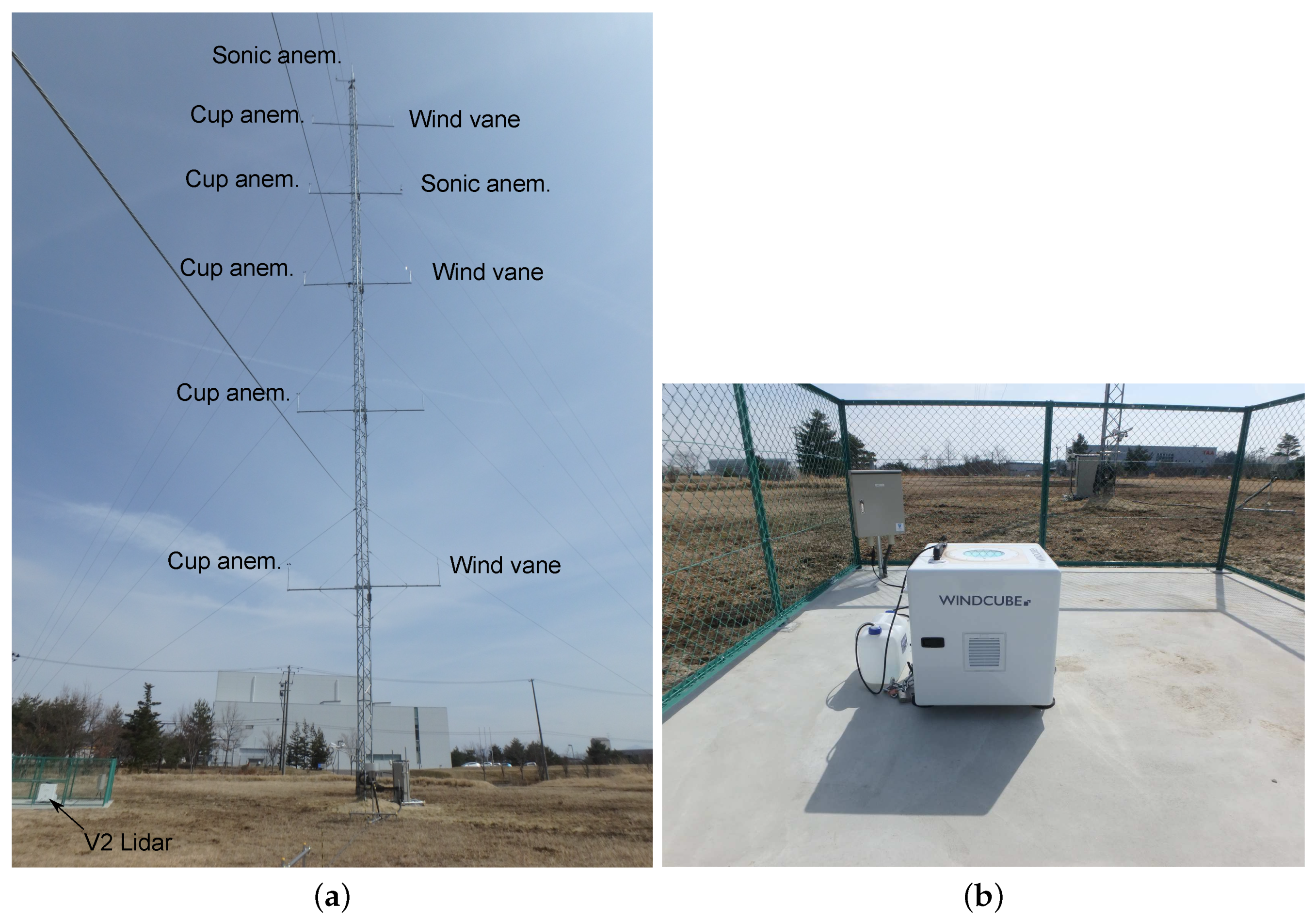
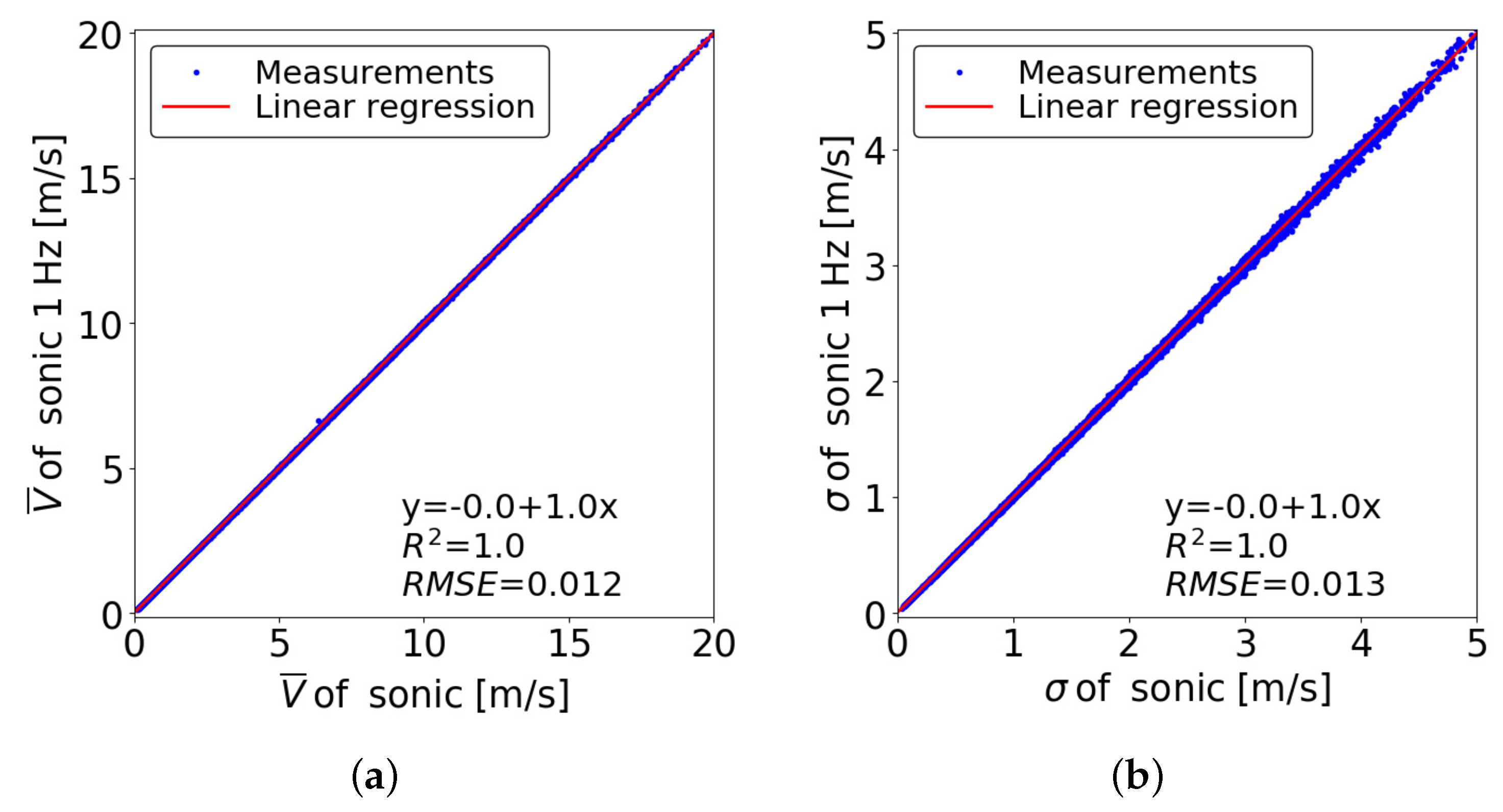
One major concern with the use of LiDARs in wind energy applications is their low sampling frequency. The V2 profiling LiDAR deployed in the current study collects wind data at 1 Hz sampling frequency compared to the 10 Hz sampling frequency of sonic anemometers (cf.
Table 1). Considering that the lower sampling rate (of both the LiDAR and the cup anemometer) may filter out small-scale turbulence structures,
Figure 8 compares the original 10 Hz sonic anemometer data against the sonic anemometer data re-sampled at 1 Hz. As is clear from both the mean wind speed and standard deviation, the difference between the 10 Hz and 1 Hz data is negligible. As a reference, the distribution of the turbulence intensity using this re-sampled sonic anemometer data is also plotted in
Figure 7d. The 1 Hz data overlaps with the original sonic anemometer data. This suggests that turbulence structures with time scales smaller than one second have negligible contribution to the total turbulence kinetic energy and therefore can be ignored for atmospheric boundary layer (ABL) turbulence. A sampling frequency of 1 Hz is sufficient for wind resource assessment and characterization of the site turbulence.
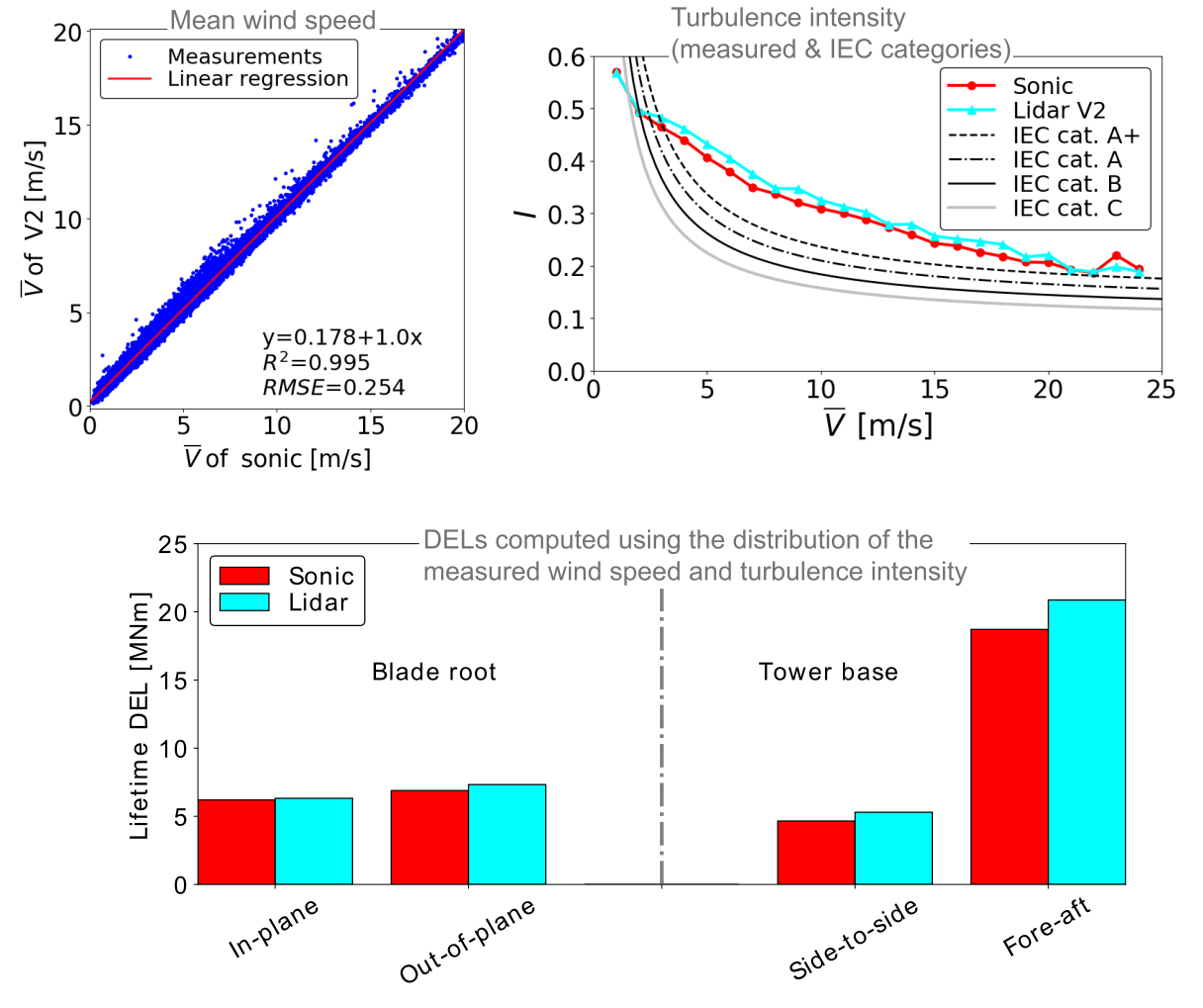
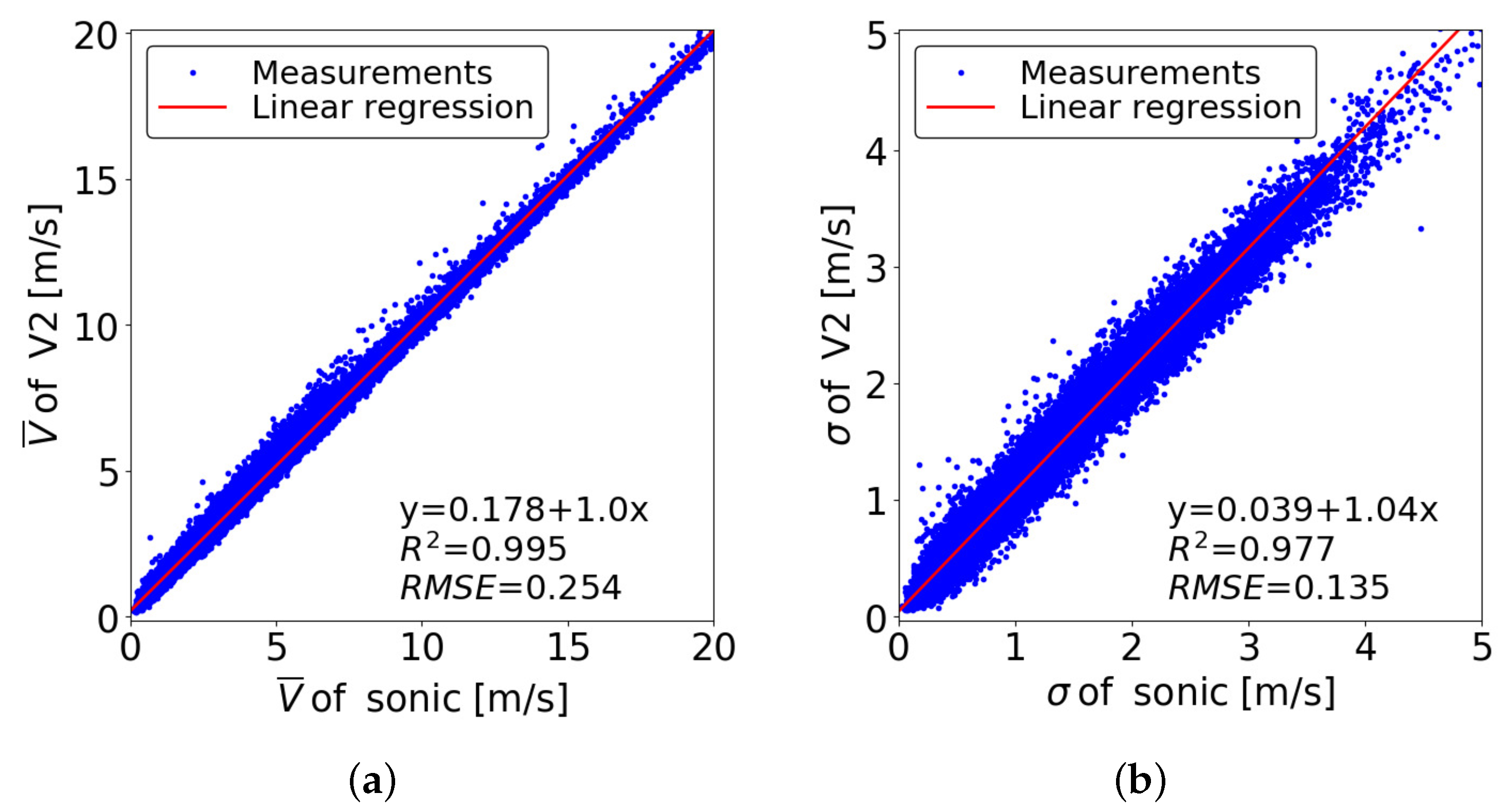
Figure 9 compares the LiDAR-measured mean wind speed and standard deviation against the measured data from the sonic anemometer installed at 57 m height. This is the highest point on the tower where a sensor is installed and disturbance of the wind due to the tower is negligible at this height. The mean wind speeds from the LiDAR show good agreement with those measured by the sonic anemometer, with the slope and offset of the regression line being 1.0 and 0.178 while
. Furthermore, underestimation of higher mean wind speeds by the LiDAR, which was observed at 40 m height, disappears at this height. The uncertainty in
measured by the LiDAR decreases at 57 m height; the slope, offset and
are 1.04, 0.039 and 0.977 respectively. The DBS method employed by the profiling LiDAR assumes horizontal homogeneity at the measurement height. However, the distance between the four measurement points increases with increasing height, and as a consequence, horizontal homogeneity may not be satisfied. The effect should be more pronounced for the standard deviation measurement. Despite this inherent characteristic of the DBS method, it is interesting to observe that the agreement between the LiDAR and the sonic anemometer measurements is better at 57 m. The number of data pairs used in this comparison is 34,783.
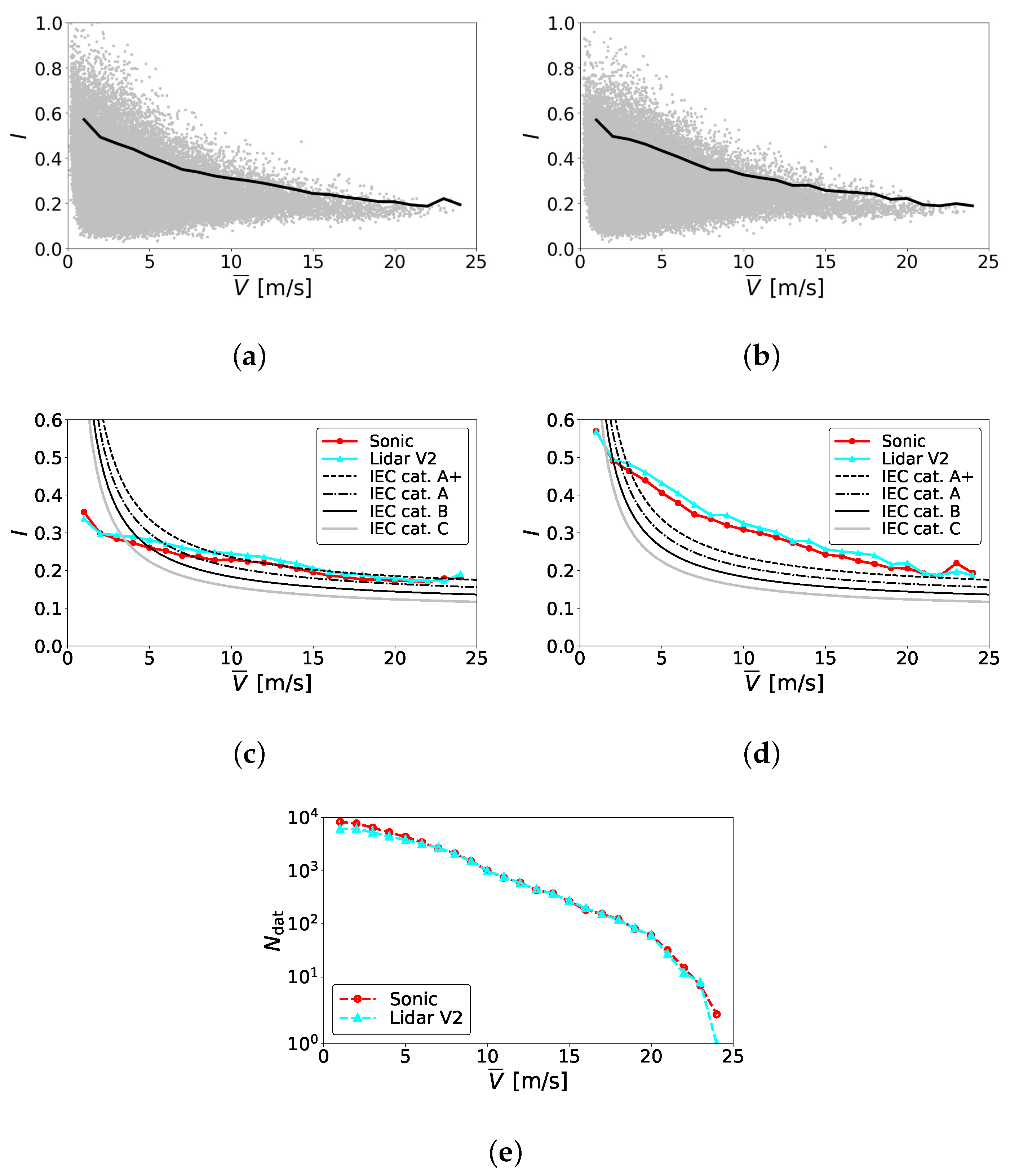
Figure 10 presents the distribution of turbulence intensity as a function of mean wind speed at 57 m height. The tendencies are similar to those at 40 m height. The bin-averaged turbulence intensity for the LiDAR is higher than that from the sonic anemometer for the mean wind speed range of 2 to 20 m/s. For reference, turbulence categories for the wind turbine classes defined in the IEC standard [
30] are also included in the figure. These standard turbulence intensity values are defined as:
where
is the reference value of the turbulence intensity,
is the hub height wind speed and
m/s. The IEC standard has four categories of reference turbulence intensities—A+ (
), A (
), B (
) and C (
)—for defining wind turbine classes. Note that for class S, the turbulence intensity and other parameters are specified by the designer [
30]. The bin-averaged turbulence intensity values measured by both the sonic anemometer and the LiDAR are less than or similar to the turbulence intensity for category A+. For
m/s, the measured values are even lower than category A, although for
m/s, the LiDAR-measured bin-averaged values are slightly larger than category A+. However, the IEC standard specifies that for the normal turbulence model (NTM), the representative value of the standard deviation should be set to the 90th percentile for the given wind speed [
30]. This is shown in
Figure 10d. For
m/s, the turbulence intensity values—obtained from the 90th percentile of
—measured by both the sonic anemometer and the LiDAR are larger than category A+ of the IEC standard. Thus, both the sonic anemometer and the LiDAR measurements show that the site requires ‘class S’ wind turbines which can withstand the site-specific higher turbulence intensity. It can be appreciated from this figure that the LiDAR-measured turbulence intensities are slightly larger (by about 2% or less) than those measured by the sonic anemometer, although the difference between the two measurement sets is not very significant. The effect of this difference on the wind turbine fatigue load is quantified and discussed in
Section 4. Note that all further analyses use measurement data from 57 m height.
3.2. Peak Wind Speed
Peak gust wind speeds are an important parameter for the design of wind turbines or any other structures that experience wind loading. The IEC [
30]—the lead organization responsible for the standardization of the wind turbine design process—has several specifications related to gust winds. Although the models for gust defined in the IEC standard or other guidelines for wind turbine certifications (see e.g., the GL Guideline [
31]) are simplified models which can be easily implemented in the aeroelastic code for faster simulation, rigorous measurement may be necessary to improve the models or simply to modify them for site-specific conditions. Note that the extreme wind speeds that turbines must be designed to withstand are defined in terms of the recurrence or return period. An extreme wind speed with a recurrence period of
years (usually
is one year or 50 years) has an annual probability of occurrence of
. Measurement of extreme wind speeds is difficult, since their frequency of occurrence is low. However, it is often a practice to estimate extreme wind speeds from measurements over a shorter period (usually one year) and to use them together with statistical models specified in guidelines to estimate extreme wind speeds with long recurrence periods [
29,
30]. Therefore, accurate measurement of peak wind speed is still crucial. However, with the instantaneous wind speed being a random process, the peak or gust wind speed for each 10-min window will also become a random variable.
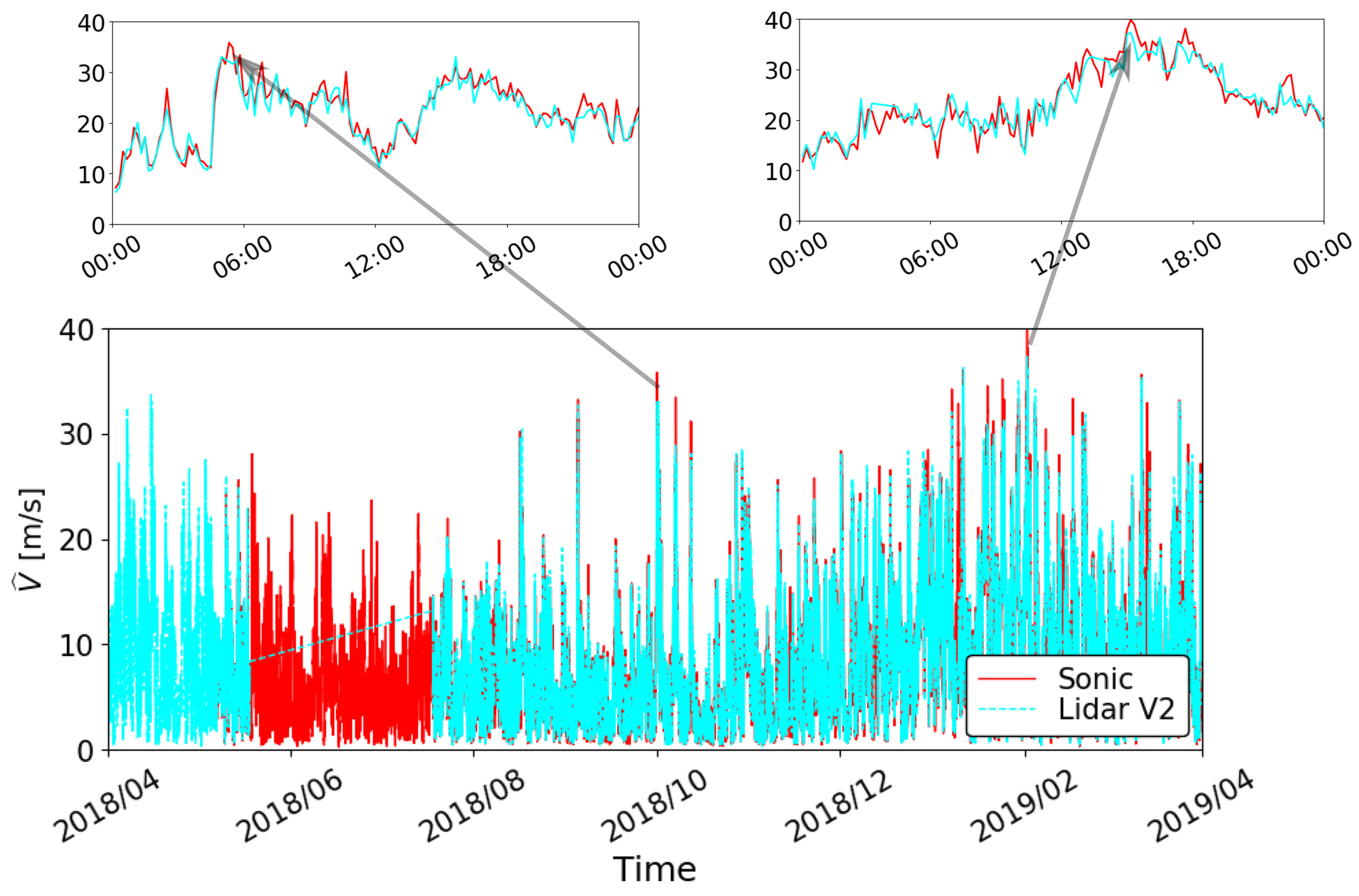
Figure 11 compares the sonic anemometer-measured and LiDAR-measured time series of the peak wind speed (
) in every 10-min time window for one-year period and at 57 m height. It can be appreciated that
measured by the sonic anemometer has a larger amplitude compared to that measured by the LiDAR. For example, in the two zoom-in figures, the highest value of the peak wind speed occurs around the same time for both the sonic anemometer and the LiDAR measurements. In the left zoom-in figure, the peak wind speed (pointed by the arrow) measured by the sonic anemometer is 33.3 m/s, while that measured by the LiDAR is 32.3 m/s, i.e., lower by roughly 3% for the LiDAR. Similarly, in the right zoom-in figure, the maximum values of the peak wind speed for the sonic anemometer and the LiDAR are 39.8 m/s and 37.3 m/s respectively, i.e., the LiDAR measurement is 6.3% lower than the sonic anemometer measurement. This is one of the limitations of the LiDAR, and the comparatively lower value of the peak wind speed may be the combined effect of the lower sampling frequency and the characteristics of the DBS mode. However, in wind engineering, it is a common practice to employ a moving average filter with an averaging time of 3 s when evaluating gusts at a site [
32].
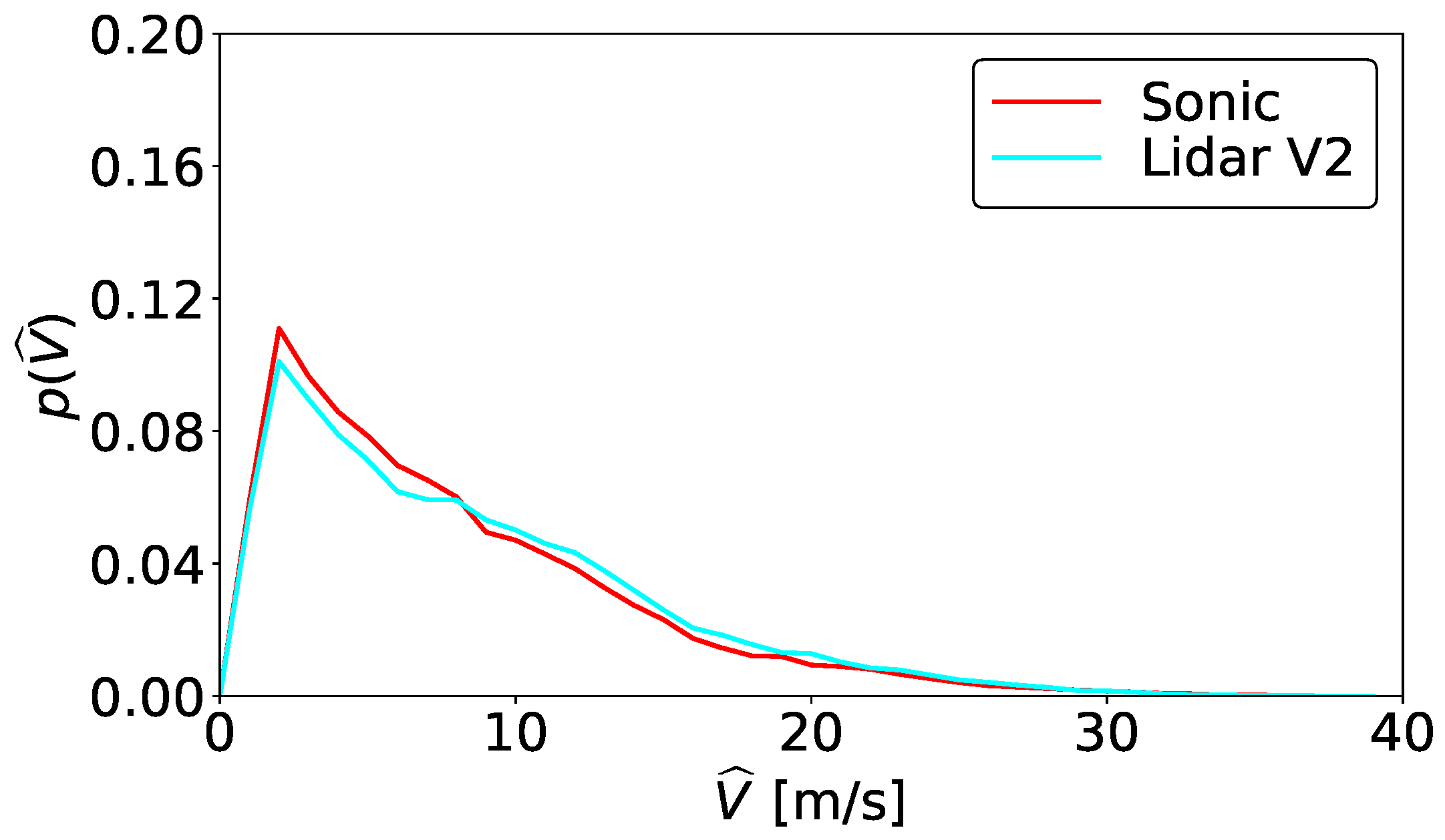
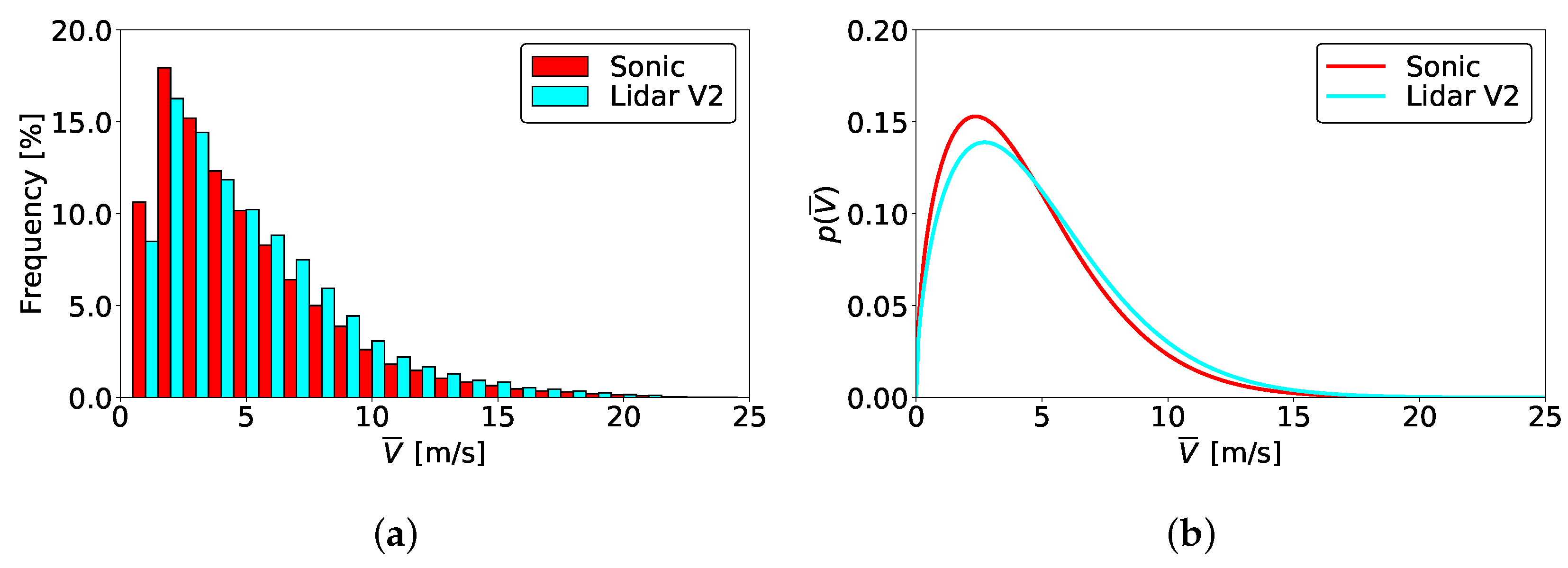
Figure 12 shows the probability density function (PDF) of
obtained from the sonic anemometer and the V2 LiDAR. It is interesting to observe that while for
, the sonic anemometer has higher PDF values, when
is larger than 9 m/s, either the V2 LiDAR has larger PDF value or the values are almost the same for both devices. This indicates that the probability of occurrence of higher
is similar for both the sonic anemometer and the LiDAR. However, this result should be observed with caution, since the number of data sets decreases with increasing
in the current measurement campaign.
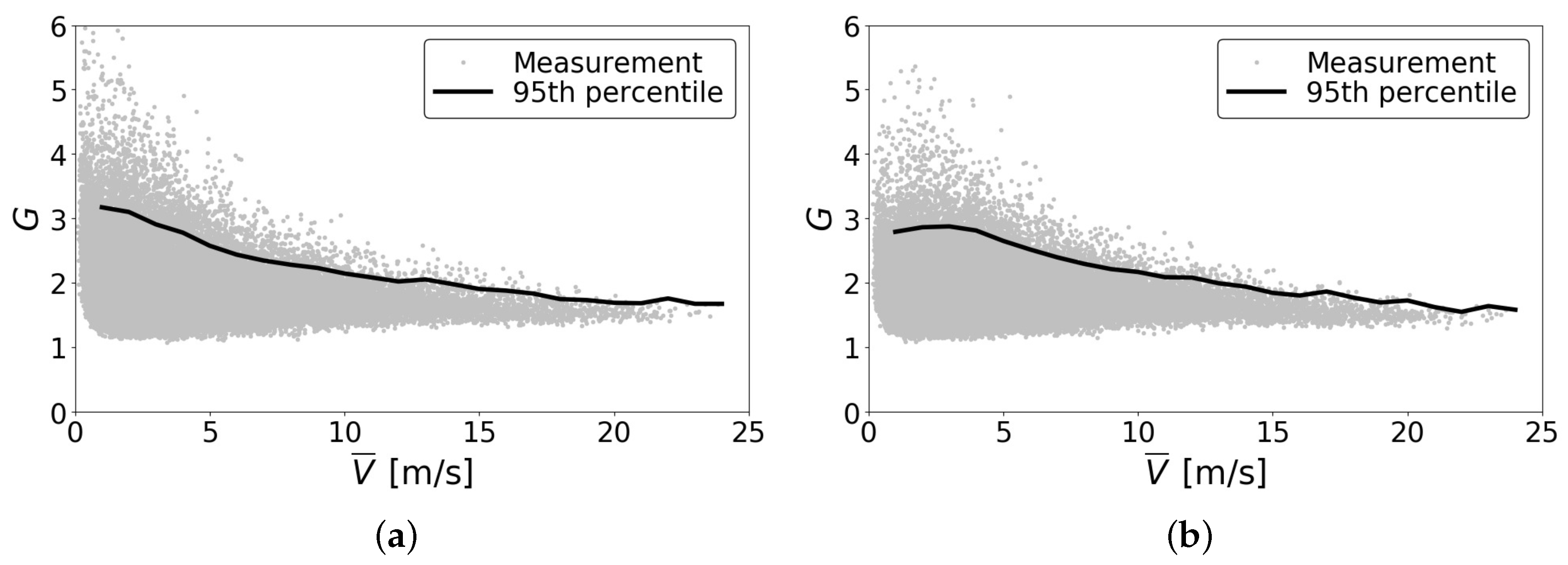
In wind engineering, peak wind speed (
) is usually expressed as a function of mean wind speed (
) and turbulence intensity (
I):
where
is the peak factor and
is the gust factor.
Figure 13 shows the distribution of the gust factor as a function of mean wind speed at 57 m height. The 95th percentiles of the measured data are shown by lines in these figures. The gust factor shows a similar trend to the turbulence intensity, i.e., the highest value occurs for the lowest mean wind speed for which the variation is also large. For higher wind speeds,
G gradually converges between 1 and 2. For both the sonic anemometer and the profiling LiDAR,
G converges roughly to 1.9, i.e.,
is 1.9 times
during strong wind speeds. One can conclude from these comparisons that LiDAR is able to measure peak wind speeds with a similar accuracy to that of sonic anemometers.
3.3. Effect of Terrain
LiDAR measurements in complex terrain are considered to be prone to larger error and higher uncertainties. The horizontal homogeneity assumption of the DBS technique is not valid in complex terrain which induce inhomogeneity to the local atmospheric boundary layer flow. Past studies used models and computational fluid dynamics (CFD) simulations to correct the error due to complex terrain in the LiDAR measurement [
11,
33]. However, these and other models are calibrated for the topography of specific sites. As stated earlier, use of multiple LiDARs is also being explored to measure wind speed in complex terrain [
34]. This section discusses the accuracy of the classical DBS mode for moderately complex terrain using a long-term measurement campaign.
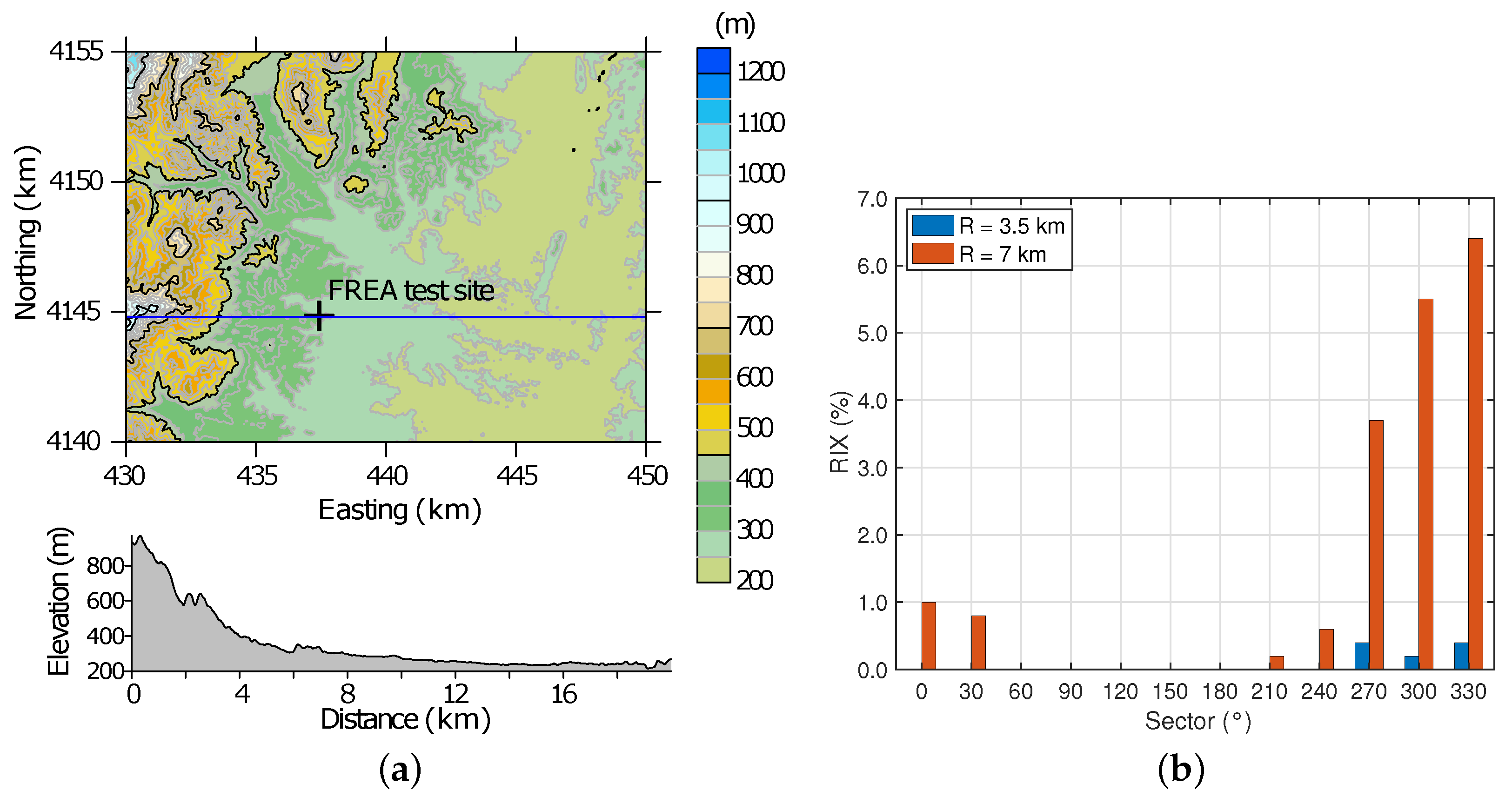
As shown in
Figure 2, the ruggedness index of the FREA test site for sector
to
is almost 0%, i.e., the site is homogeneous for this sector. On the other hand, from
through
, the ruggedness index is 38 to 65%, and thus the wind blowing from this sector should be influenced by moderately complex terrain.
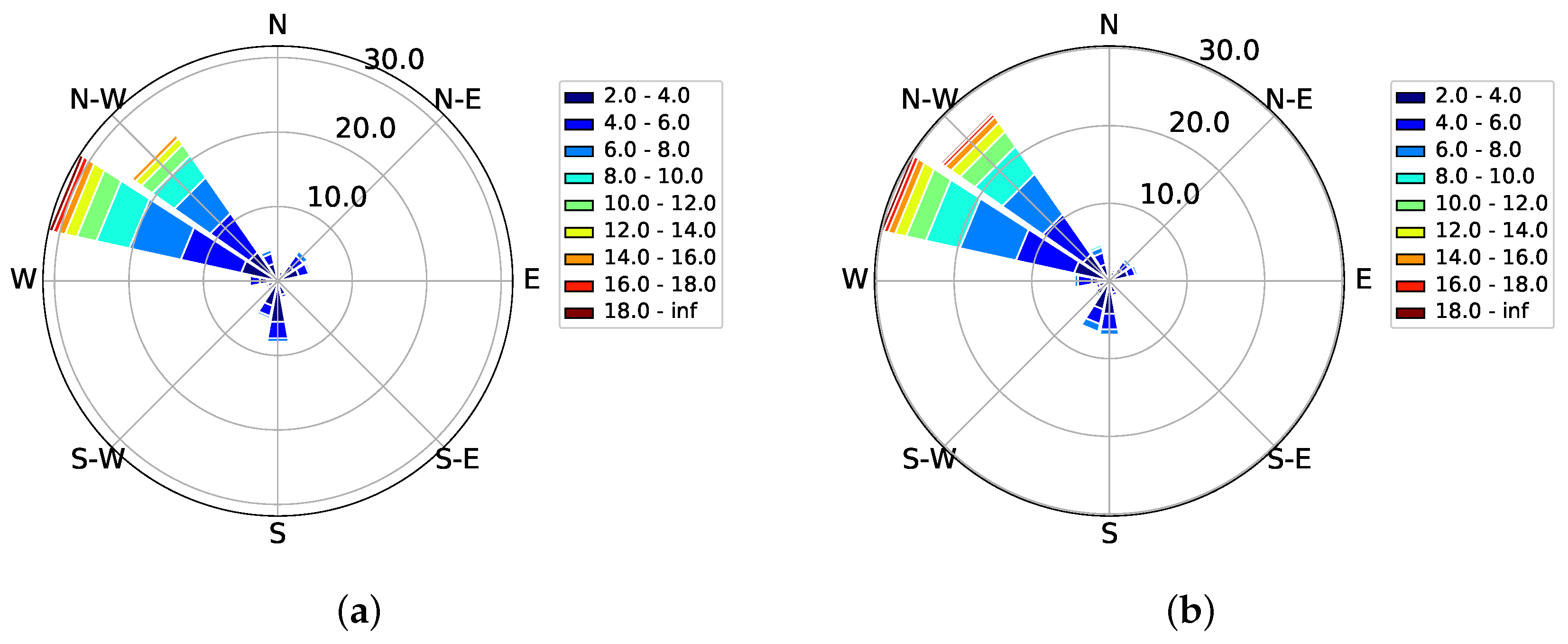
Figure 14 shows wind roses from the sonic anemometer measurement and the V2 LiDAR measurement at 57 m height. It can be appreciated that both the sonic anemometer and the LiDAR show a similar distribution of wind speeds and directions. As can be seen in the figures, the dominant wind directions are WNW and NW. All wind speeds above 12 m/s blow from these two directions. However, these directions lie in the sector with moderately complex terrain. The fraction of wind speeds blowing from any other direction is less than 10%.
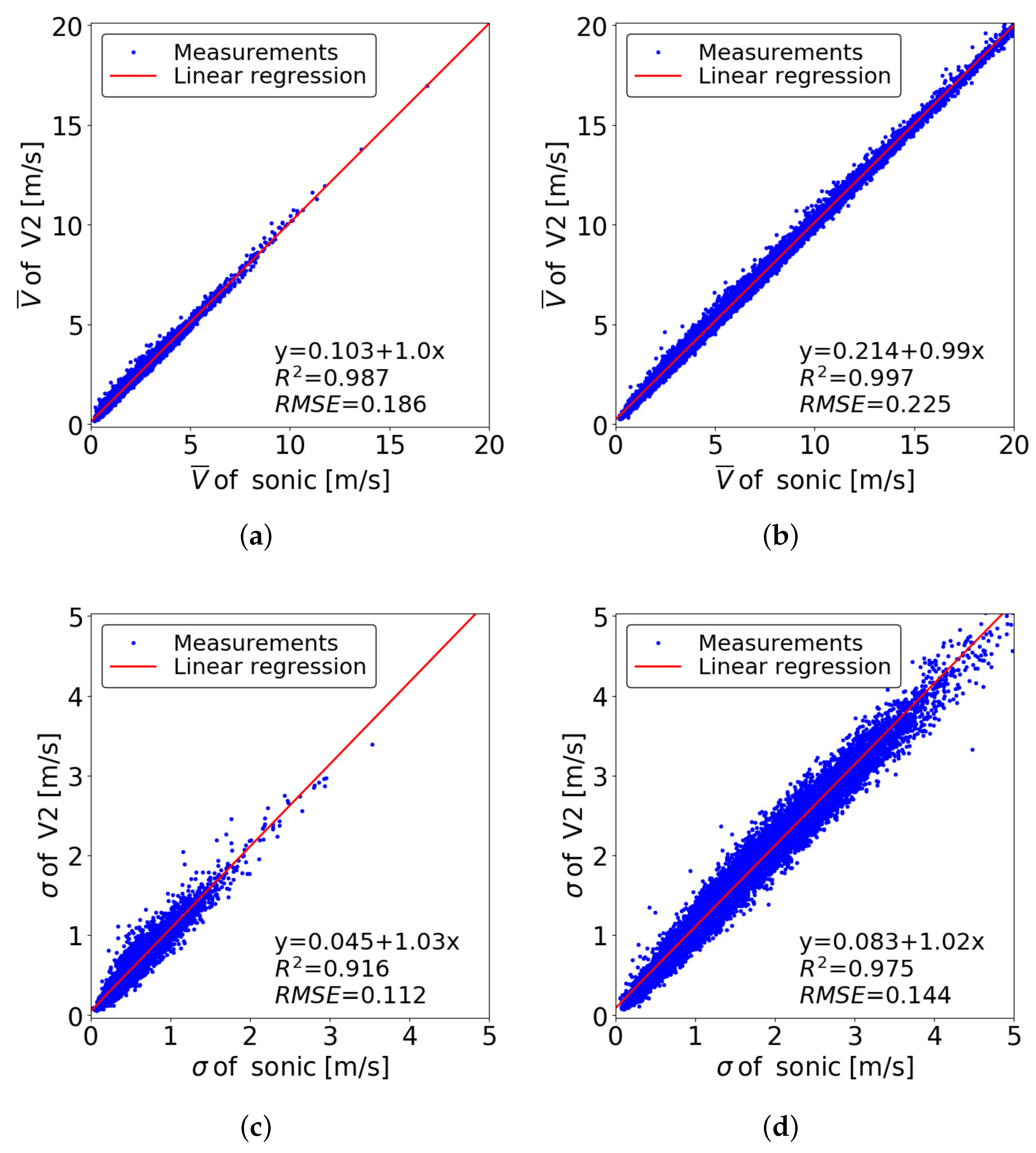
Figure 15 compares the LiDAR measurement for homogeneous terrain (wind direction range
to
) and moderately complex terrain (wind direction range
to
) against the corresponding sonic anemometer data at 57 m height. Note that the number of data for the homogeneous terrain comparison is 4743, while that for the moderately complex terrain comparison is 17,232. For the mean horizontal wind speed, both the homogeneous and complex terrain data sets show good agreement with the sonic anemometer measurement, although the root-mean-square error (RMSE) is higher for the latter. Since the mean wind speeds and number of data sets are lower for the homogeneous case, it is not possible to accurately quantify the comparison. Nevertheless, one can conclude that the LiDAR-measured mean wind speed is accurate for moderately complex terrain. Regarding the standard deviation,
is 0.916 for the homogeneous terrain case and 0.975 for the complex terrain case, while the RMSE is 0.112 and 0.144 respectively for the homogeneous and complex terrain cases. The LiDAR performance is roughly the same for both cases. The long-term measurements employed in the current study must have been affected by changing atmospheric stability. For example, even when the wind is blowing from the direction of homogeneous terrain, if the ABL is thermally unstable (i.e., convective ABL), the flow will be non-uniform. Therefore, measured data should be further separated based on the ABL stability. This will be considered in future studies.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}