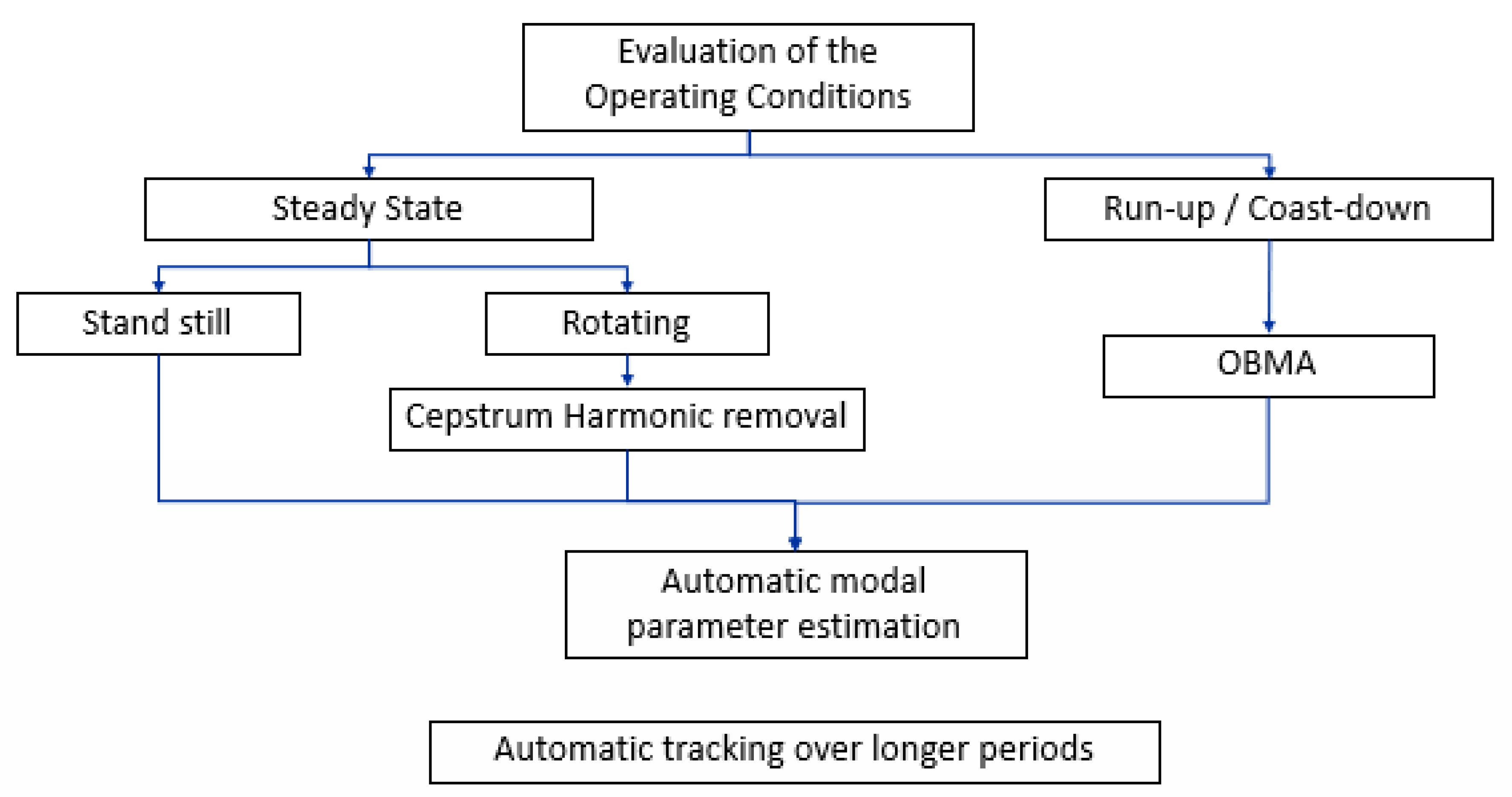
Cepstrum editing procedure must be combined with automated modal parameters estimation and tracking algorithms in order to perform automatic OMA on continuous stream of data coming from a wind turbine drivetrain in real operating conditions. This section describes the methodologies listed in
Figure 1 with specific attention to automation of the different procedures.
3.1. Selection of the Cepstrum Lifter
To remove the harmonics, the state-of-the-art algorithm described in
Section 2 is implemented. The use of two different low pass lifters in the quefrency domain is investigated—exponential and rectangular. While the rectangular lifter truncates the cepstrum domain signal without influencing its decay, the exponential one adds a known amount of damping in the edited signal. This additional damping can be removed from the estimates by means of the following equation [
24]:
where, for each estimated mode,
is the real damping
,
is the measured damping
,
is the real frequency
and
is the time constant of the exponential window
. However it has to be noticed that Equation (
7) cannot be used if an angular resampled signal is edited with the cepstrum lifter, due to the fact that the angular cepstrum domain is not equivalent anymore to the time-domain cepstrum.
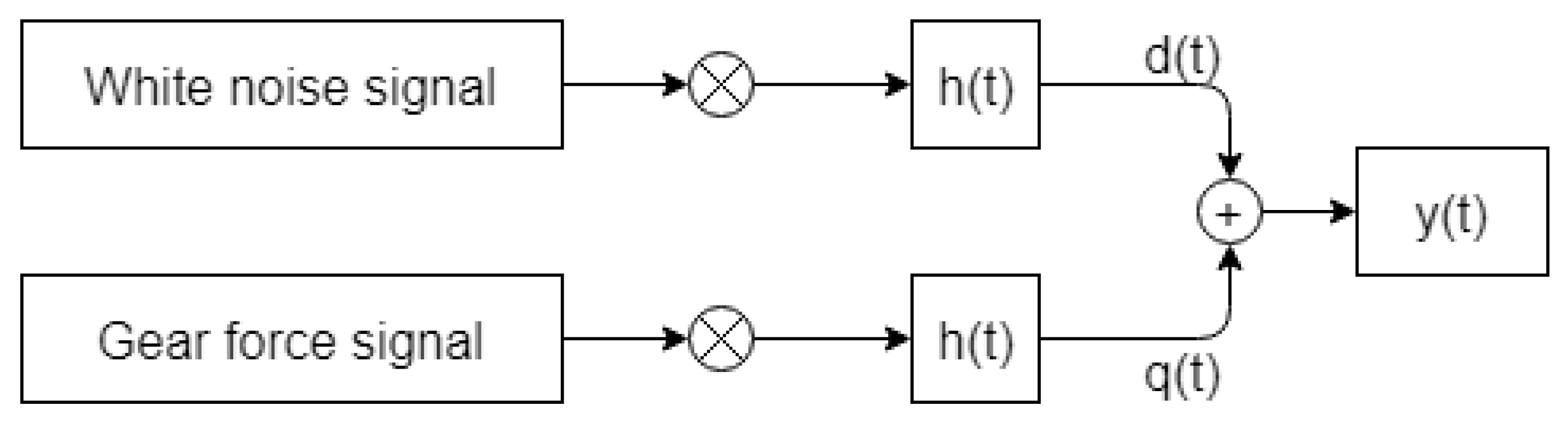
A pre-analysis using a synthesised signal is performed in order to investigate the optimal low pass filter to be applied to the cepstrum domain signal. The generated signal aims to simulate a real structure, featured by transfer path
.
A three modes system is simulated, with the modal parameters listed in
Table 1:
The system is excited by two sources:
The final signal is then given by the sum of two time domain signals:
where, being
the time domain impulse response of the system,
A schematic explanation of the simulated signal is shown in
Figure 2. In Equation (
12) and
Figure 2 the symbol ⊗ represents the convolution between two signals.
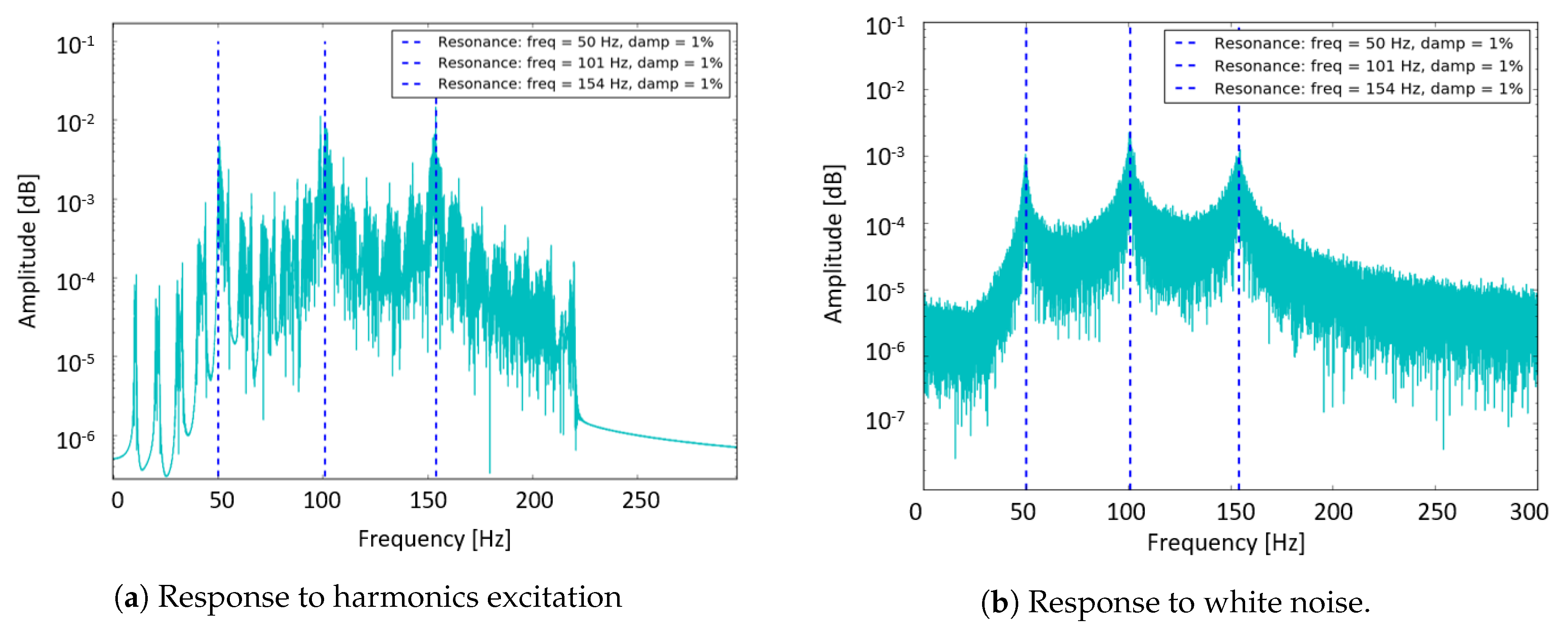
In
Figure 3 the two different components of the signal are shown: response to harmonic excitation (
Figure 3a,
in Equation (
12)) and response to white noise (
Figure 3b,
in Equation (
12)). In
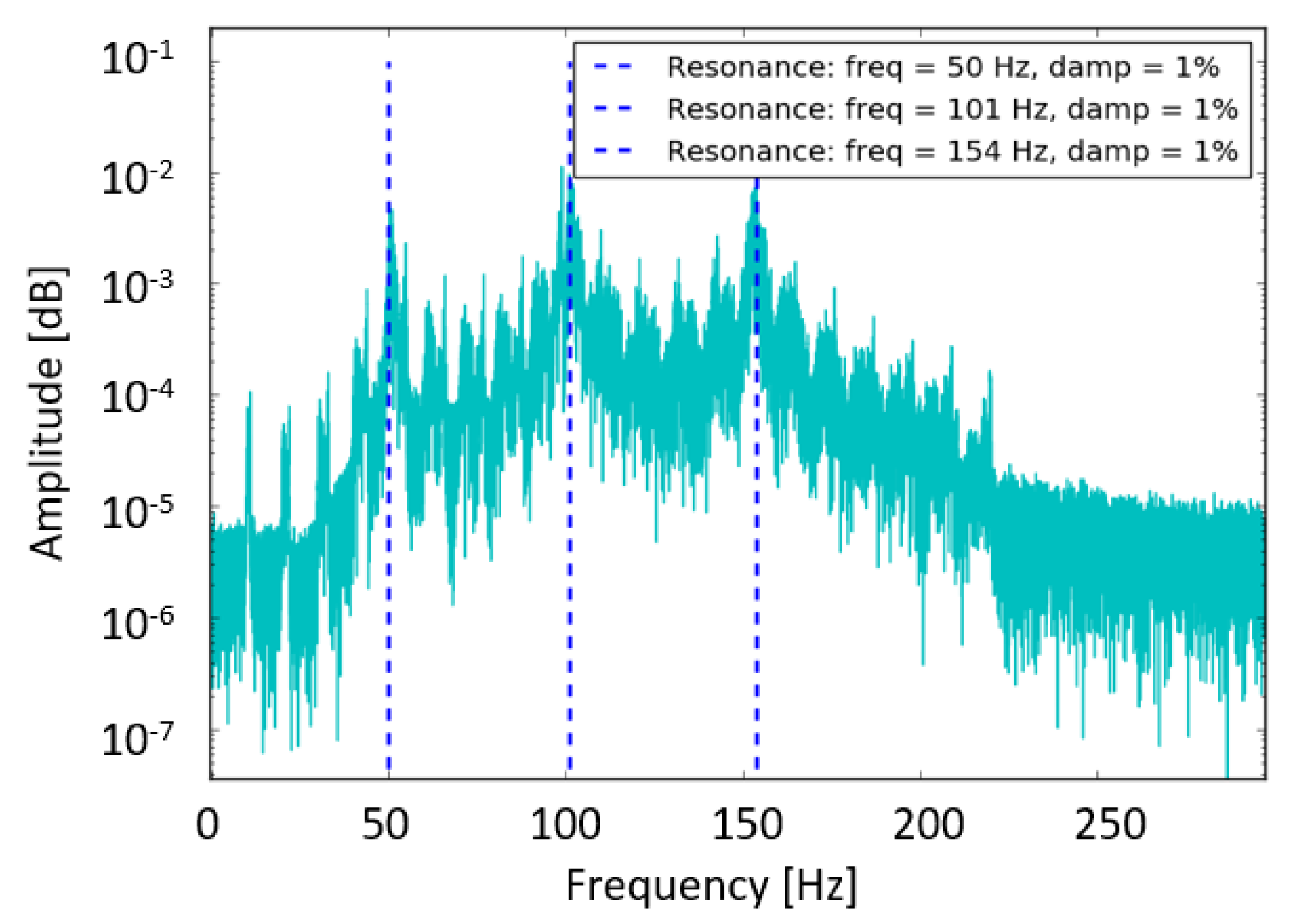
Figure 4, the global signal is shown.
The purpose of analyzing this synthesized signal is to test different lifters that can be used—exponential and rectangular lifters applied to time and angular domain signals. After the cepstrum editing procedure, classic OMA is used to verify the validity of the different adopted procedures by means of a comparison of the estimated modal parameters with the expected ones.
To prepare the data for OMA, the periodogram approach [
25] is used on the edited signals. The analysis is performed for signals with speed varying around a mean value by amounts of 2% (
Table 2), 10% (
Table 3) and 15% (
Table 4). When an exponential window is used in the cepstrum of the time domain signal (first column in the tables), the damping estimates are corrected with Equation (
7) to take into account the additional damping introduced by the use of the lifter. Both the values are shown, the estimated one (on the left side) and the corrected one (on the right side). The analyses are performed for different values of the cutoff quefrency, that is, the time constant of the low pass lifter applied in the cepstrum domain. This will help in investigating the influence of this parameter, for which a more thorough analysis is shown in
Section 3.2.
Some comments are required on the results shown in
Table 2,
Table 3 and
Table 4. First of all, the estimated frequency and damping values closest to the expected ones are highlighted (i.e., values in red); this helps in understanding what procedure performs best. Results show the non correct estimation of the damping in case an exponential lifter is used on an angular domain signal. This is expected since, as already stated, the damping introduced by the exponential window can not be corrected with Equation (
7). However in case the exponential lifter is applied on a time domain signal, the results are also less accurate; after the use of Equation (
7) negative damping values are obtained. This is physically impossible because it would lead to an unstable system. Looking at the results obtained with the rectangular window, it can be concluded that resampling raw data helps in improving the estimates of the damping.
Based on these observations, the use of rectangular lifter on an angular resampled signal is selected for processing real data.
3.2. Automatic Selection of the Cutoff Quefrency
Since the objective of this research is to make the algorithm autonomous, this section focuses on the description of a method that allows an automatic selection of the parameter needed by the cepstrum editing procedure—the cutoff quefrency.
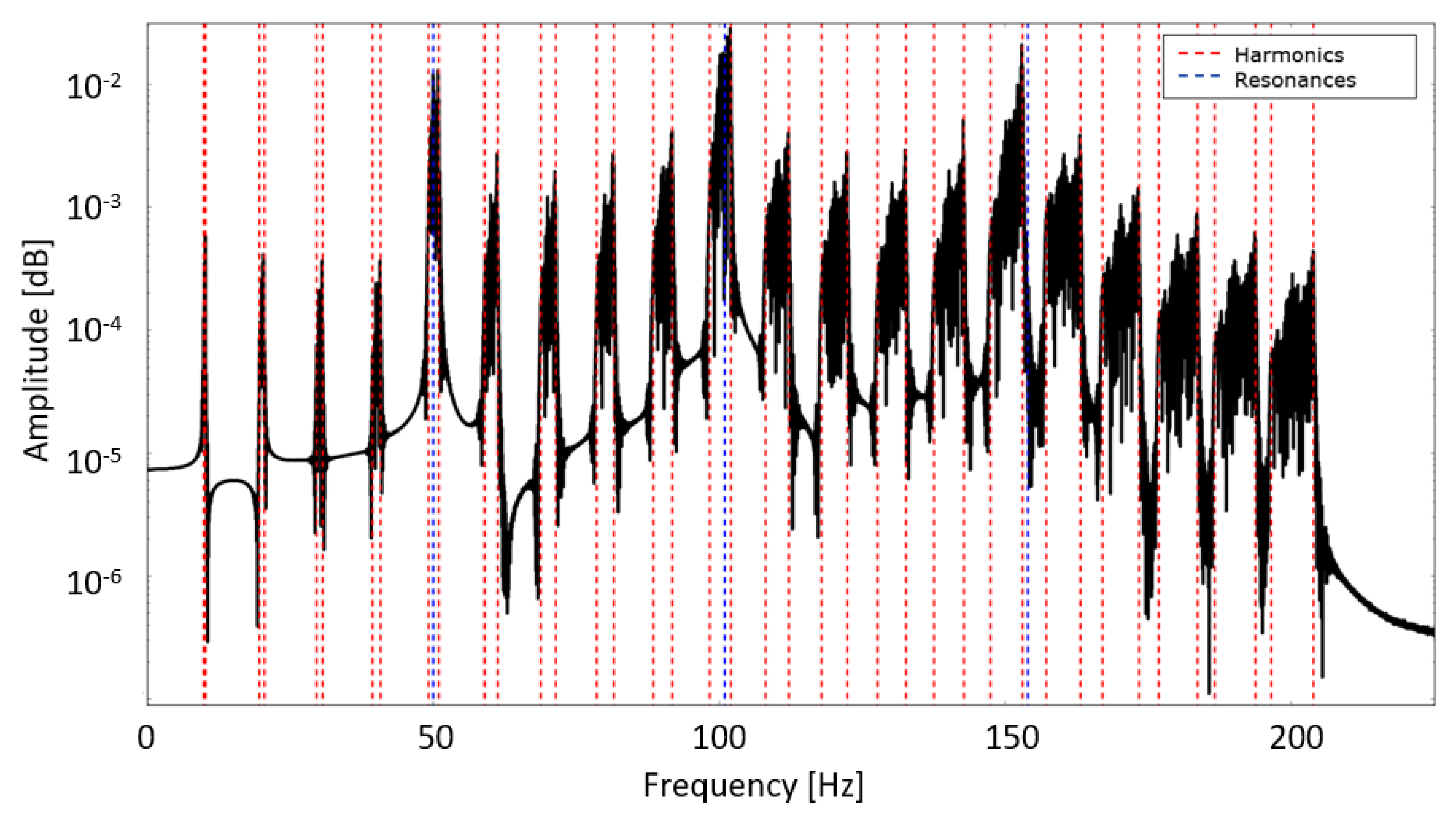
Figure 5 represents the original signal processed with the periodogram algorithm, with the objective of showing the presence of harmonics, and their influence in the spectrum (red lines). The latter is calculated using Equation (
13), where
is the variation of the frequency in time, O is the order of the machine and
the rotational speed. Blue lines in
Figure 5 represent the three resonance frequencies.
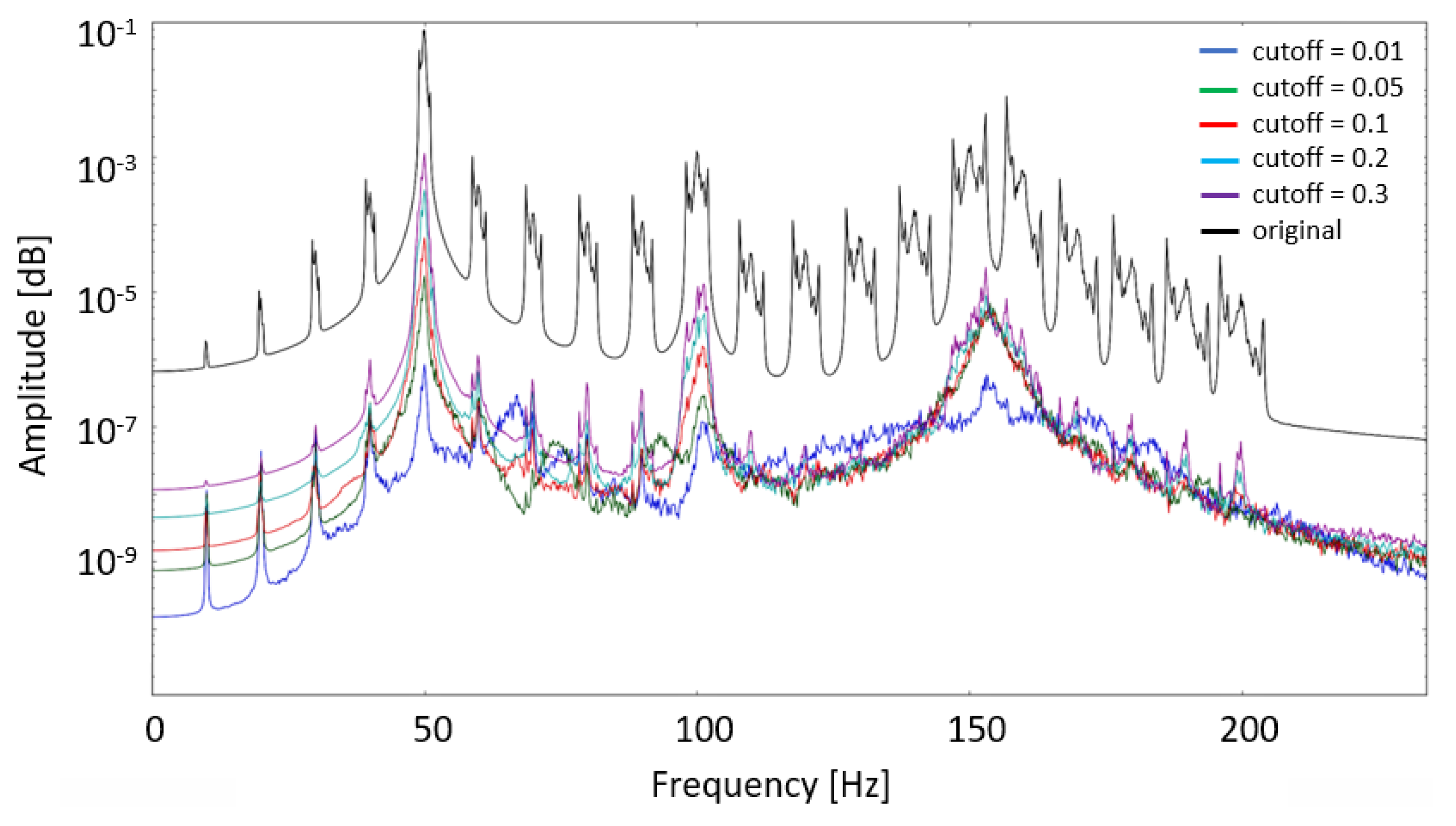
In
Figure 6, the iterative use of the cepstrum editing procedure is shown. Decreasing cutoff quefrency values are used. From
Figure 6 it can be noticed how higher values of the cutoff quefrency preserve the resonance content, but do not reduce the harmonic-related peaks, while lower values of the cutoff quefrency overly distort the resonances.
The algorithm for the choice of the optimal time constant, is based on the combination of two approaches.
The first one is more empirical and is based on the reduction of the total power introduced by the harmonics. Considering Parseval’s theorem, the latter is calculated with Equation (
14) applied in each frequency band that is influenced by harmonic content:
where
is the discrete Fourier transform,
k is the frequency bin number and
N the number of samples. The iterative procedure stops when the amount of energy introduced by the harmonics is 10% of the original value, that is, the energy calculated before applying the cepstrum editing procedure. The choice of this limit value must be defined considering the system under analysis and using a rough prediction on how much the harmonics influence the signal. This procedure presents a disadvantage—if the cutoff quefrency needed to ensure the required energy reduction is too low, it is possible to introduce a distortion in the modal content of the signal. In order to avoid this, the method is coupled with a second algorithm that allows to set a lower bound for the cutoff quefrency value.
This second approach is more theoretical. In Reference [
26] it is shown that the damped exponentials are additionally weighted by
in the cepstrum domain. Knowing this, it is possible to estimate at which quefrency value the modal content has mostly died out. Of course, to calculate it, information on the frequency and damping of the expected modes must be a priori known, that is not the case in most real applications. Moreover, this is valid only when considering a single degree of freedom system—in the cepstrum domain the contributions of each mode cannot be simply summed (as in the time domain) due to the use of the logarithmic function. However, considering Equation (
15) [
26] it can be shown that the mode that declines slower in the quefrency domain is the one with a lower frequency. So if the knowledge of the system under analysis allows to roughly estimate a priori the lower expected resonance frequency and the average damping of the structure, it is possible to have an idea of the minimum value of the cutoff quefrency that does not introduce much distortion in the modal content of the signal.
where
n is the quefrency sample number,
is the time sample spacing (so that
), and
is the damping constant corresponding to the exponential decay
.
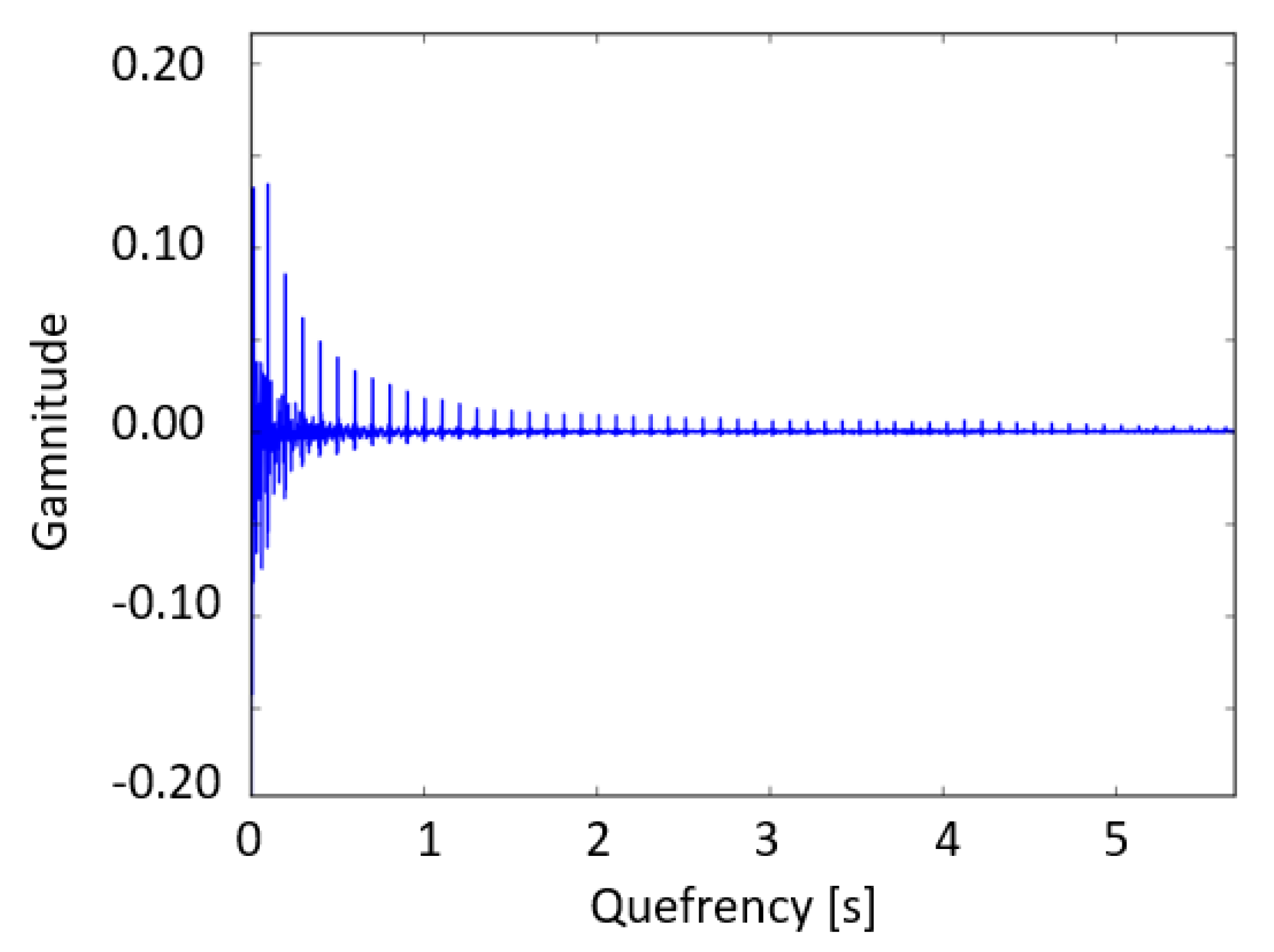
Figure 7 shows the cepstrum of the simulated signal, illustrating the clear distinction of the two regions in the quefrency domain—one containing the modal content and one containing the peaks related to rahmonics. In
Figure 7 it is possible to notice how the rahmonics are also present in the modal content region. This makes clear why the definition of this parameter is so critical.
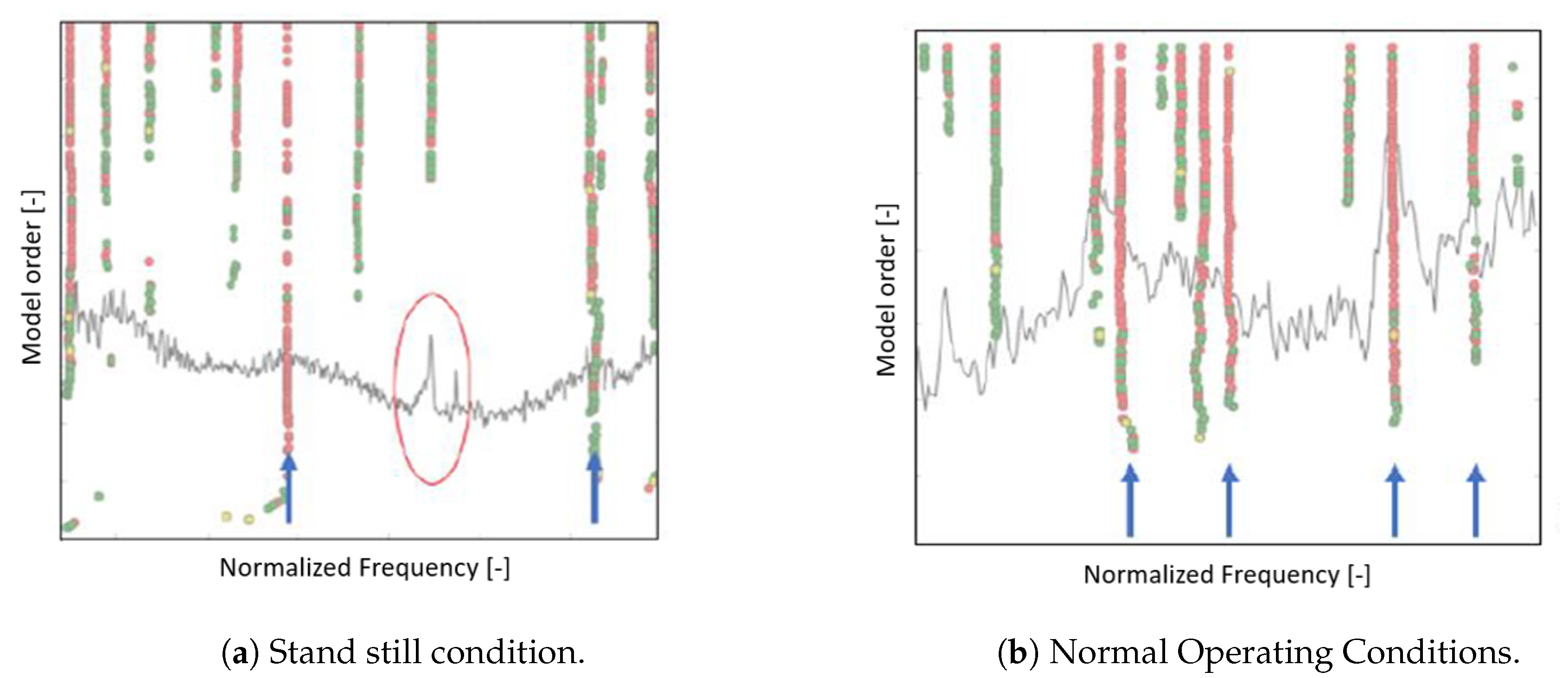
3.3. Automatic Modal Parameter Estimation
As explained in
Section 2, the extraction of the modal parameters by means of OMA requires the selection of physical poles from the stabilization diagram. Originally this action was demanded of the analyst, that through an interactive stabilization diagram was able to discriminate the spurious poles from the physical ones, in order to allow the algorithm to synthesize a correct transfer function. However, an automatic selection of the physical poles from the ones represented on the stabilization diagram started to be investigated for several reasons; first of all, to reduce the dependency of the accuracy of the estimation on the level of expertise and reduce this source of uncertainty [
27,
28]; secondly to allow the analysis of big amount of data continuously. The implementation of fuzzy logics, heuristic rules and clustering analysis as methods to group the modes with similar characteristics [
29,
30,
31,
32] can be used as valid solution to make a distinction between spurious and physical poles. Since the method described in Reference [
33] resulted in being robust and systematic, it has been adopted in this work. This method uses clustering algorithms in three steps:
Separation of certainly spurious and possibly physical poles based on single mode validation criteria;
Grouping the possibly physical poles in separated clusters;
Selection of the clusters containing physical modes
The authors focused their attention on finding methods to extract the parameters required by the analysis of the data itself.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}