Multi-DOF WEC Performance in Variable Bathymetry Regions Using a Hybrid 3D BEM and Optimization



Abstract
:1. Introduction
2. Formulation
2.1. Heaving Cylinder over Variable Bathymetry
2.2. Propagation Wave Field
2.3. Diffraction and Radiation Potentials
2.4. PML Implementation
2.5. Mesh Generation
2.6. Variable Bathymetry
2.7. 2-DOF WEC Problem Formulation
3. Design Assessment Features
3.1. Geometries Generation
3.2. PTO Damping Configuration
3.3. Performance Index Definition
4. Numerical Results and Discussion
4.1. Heaving Cylindrical WEC over Variable Bathymetry
4.2. Heaving (1-DOF) WECs over Variable Bathymetry
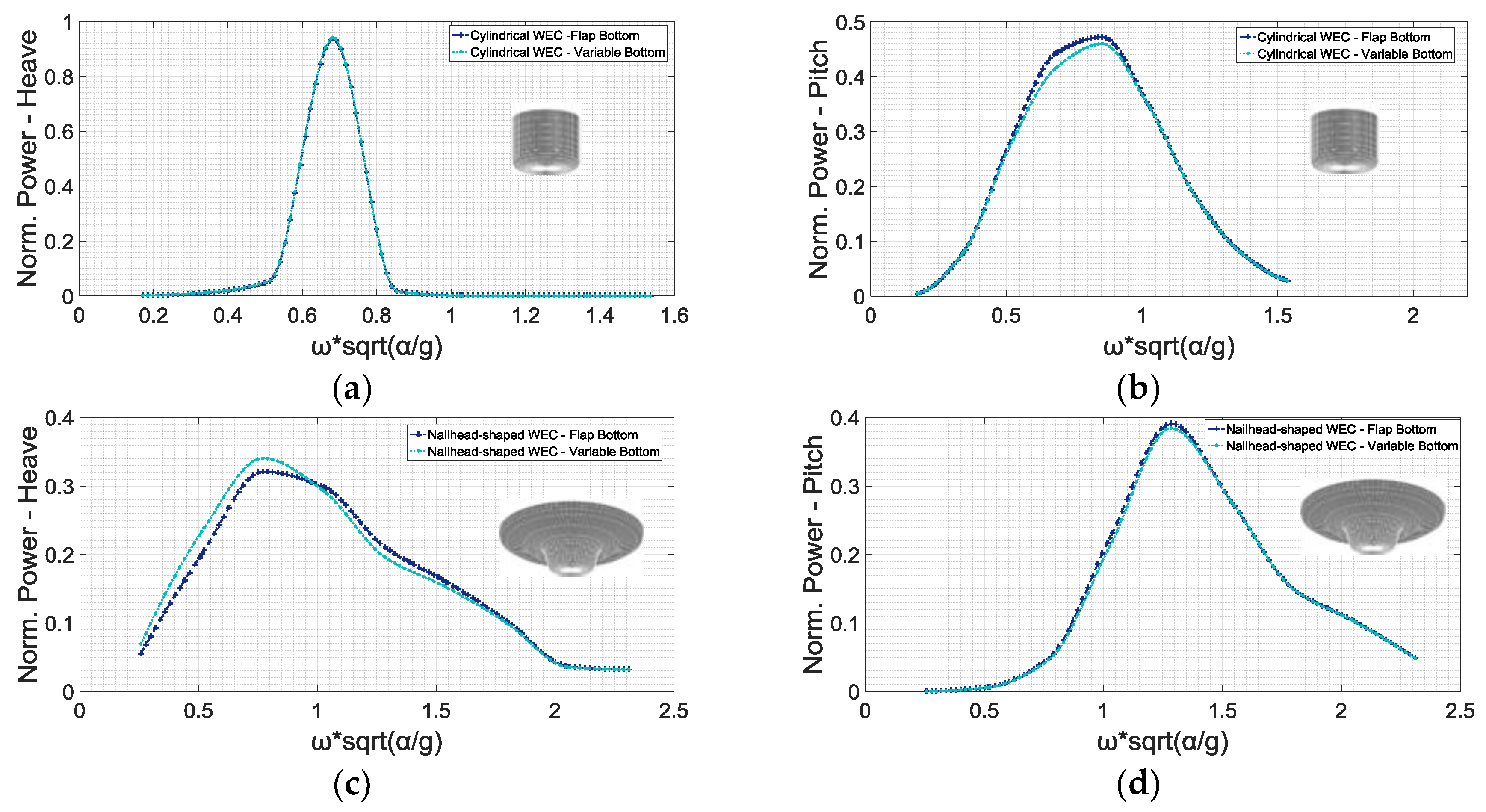
4.3. 2-DOF WECs over Variable Bathymetry
5. Sloping Seabed Effect
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| BC | Boundary Condition |
| BEM | Boundary Element Method |
| CMM | Coupled-Mode Model |
| CMS | Coupled-Mode System |
| DOF | Degree Of Freedom |
| FS | Free Surface |
| PI | Performance Index |
| PML | Perfectly Matched Layer |
| PTO | Power Take Off |
| RAO | Response Amplitude Operator |
| R&D | Research & Development |
| SWAN | Simulating Waves Nearshore |
| SWL | Sea Water Level |
| WEC | Wave Energy Converter |
Nomenclature
| a | Waterline radius |
| A | Hydrodynamic matrix |
| abot | Bottom slope coefficient |
| aij | Added mass coefficient (i, j=1,…,6) |
| bij | Hydr. damping coefficient (i, j=1,…,6) |
| Bmn | CMS coefficient |
| Bs | PTO damping coefficient |
| cij | Hydrostatic coefficient (i, j=1,…,6) |
| Cmn | CMS coefficient |
| CPTOi | PTO mean-damping multiplier |
| Cs | PTO hydrostatic coefficient |
| d | Bottom clearance |
| Dij | Coupling coefficient of i-j modes |
| FP | Source strength of pth element |
| g | Gravity acceleration |
| GB | Center of buoyancy |
| H | Wave height |
| h | Depth |
| i | Imaginary unit |
| M | Mass |
| N | Number of elements per wavelength |
| ni | Normal vector of i-mode (i=1,…,6) |
| P | Power |
| P.I. | Performance Index |
| R | Radial distance |
| r | Position vector |
| Ra | PML activation radius |
| Ryy | Radius of gyration |
| t | Time |
| T | Draft |
| UP | Induced velocity by pth element |
| x | x-Coordinate |
| XD | Diffraction excitation forces |
| XP | Froude Krylov excitation forces |
| y | y-Coordinate |
| z | z-Coordinate |
| Zn | Vertical function of nth-mode (n=-1, 0, 1, …) |
| Αmn | CMS coefficient |
| η | Free surface elevation |
| ηeff | PTO efficiency |
| λ | Wavelength |
| μ | Frequency parameter |
| ξi | Response amplitude of i-mode (i=1,…,6) |
| ρ | Water density |
| Φ | Wave potential |
| φd | Diffraction potential |
| φi | Radiation potential of i-mode (i=1,…,6) |
| φn | Amplitude of nth-mode (n=-1, 0, 1, …) |
| φp | Propagation potential |
| ΦP | Induced potential by pth element |
| φR | Radiation potential |
| ω | Angular frequency |
| ωR | Resonance angular frequency |
References
- Al Shami, E.; Zhang, R.; Wang, X. Point Absorber Wave Energy Harvesters: A Review of Recent Developments. Energies 2019, 12, 47. [Google Scholar] [CrossRef]
- Wehausen, J.V. The Motion of Floating Bodies. Annu. Rev. Fluid Mech. 1971, 3, 237–268. [Google Scholar] [CrossRef]
- Mei, C.C. The Applied Dynamics of Ocean Surface Waves; World Scientific: Singapore, 1989. [Google Scholar]
- Falnes, J. Ocean Waves and Oscillating Systems: Linear Interactions including Wave Energy Extraction; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Verao Fernandez, G.; Balitsky, P.; Stratigaki, V.; Troch, P. Coupling Methodology for Studying the Far Field Effects of Wave Energy Converter Arrays over a Varying Bathymetry. Energies 2018, 11, 2899. [Google Scholar] [CrossRef]
- Balitsky, P.; Quartier, N.; Verao Fernandez, G.; Stratigaki, V.; Troch, P. Analyzing the Near-Field Effects and the Power Production of an Array of Heaving Cylindrical WECs and OSWECs Using a Coupled Hydrodynamic-PTO Model. Energies 2018, 11, 3489. [Google Scholar] [CrossRef]
- Fernández, G.V.; Stratigaki, V.; Troch, P. Irregular Wave Validation of a Coupling Methodology for Numerical Modelling of Near and Far Field Effects of Wave Energy Converter Arrays. Energies 2019, 12, 538. [Google Scholar] [CrossRef]
- Charrayre, F.; Peyrard, C.; Benoit, M.; Babarit, A. A Coupled Methodology for Wave-Body Interactions at the Scale of a Farm of Wave Energy Converters Including Irregular Bathymetry. In Proceedings of the 33rd International Conference on Ocean, Offshore and Arctic Engineering (ASME 2014), San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- McCallum, P.; Forehand, D.; Sykes, R. On the Performance of an Array of Floating Wave Energy Converters for Different Water Depths. In Proceedings of the 33rd International Conference on Ocean, Offshore and Arctic Engineering (ASME 2014), San Francisco, CA, USA, 8–13 June 2014. [Google Scholar]
- Massel, S.R. Extended refraction-diffraction equation for surface waves. Coast. Eng. 1993, 19, 97–126. [Google Scholar] [CrossRef]
- Touboul, J.; Rey, V. Bottom pressure distribution due to wave scattering near a submerged obstacle. J. Fluid Mech. 2012, 702, 444–459. [Google Scholar] [CrossRef]
- Belibassakis, K.; Bonovas, M.; Rusu, E. A Novel Method for Estimating Wave Energy Converter Performance in Variable Bathymetry Regions and Applications. Energies 2018, 11, 2092. [Google Scholar] [CrossRef]
- Bonovas, M. WECs over General Bathymetry: A Novel Approach for Performance Evaluation and Optimization. Master’s Thesis, National Technical University of Athens, Athens, Greece, 2019. [Google Scholar]
- Athanassoulis, G.A.; Belibassakis, K.A. A consistent coupled-mode theory for the propagation of small-amplitude water waves over variable bathymetry regions. J. Fluid Mech. 1999, 389, 275–301. [Google Scholar] [CrossRef] [Green Version]
- Belibassakis, K.A.; Athanassoulis, G.A.; Gerostathis, T.P. A coupled-mode model for the refraction-diffraction of linear waves over steep three-dimensional bathymetry. Appl. Ocean Res. 2001, 23, 319–336. [Google Scholar] [CrossRef]
- Belibassakis, K.A.; Gerosthathis, T.P.; Athanassoulis, G.A. A Coupled-Mode Model for the Transformation of Wave Systems Over Inhomogeneous Sea/Coastal Environment. In Proceedings of the 29th International Conference on Offshore Mechanics and Arctic Engineering (OMAE2010), Shanghai, China, 6–11 June 2010; pp. 471–478. [Google Scholar] [CrossRef]
- Berkhoff, J.C.W.; Booij, N.; Radder, A.C. Verification of numerical wave propagation models for simple harmonic linear water waves. Coast. Eng. 1982, 6, 255–279. [Google Scholar] [CrossRef]
- Vincent, C.L.; Briggs, M.J. Refraction–diffraction of irregular waves over a mound. J. Waterw. Port Coast. Ocean Eng. 1989, 115, 269–284. [Google Scholar] [CrossRef]
- Booij, N.; Ris, R.C.; Holthuijsen, L.H. A third-generation wave model for coastal regions: 1. Model description and validation. J. Geoph. Res. 1999, 104, 7649–7666. [Google Scholar] [CrossRef] [Green Version]
- Ryszard, M.S. Ocean Surface Waves: Their Physics and Prediction; World Scientific: Singapore, 1996. [Google Scholar]
- Belibassakis, K.A.; Gerostathis, T.P.; Athanassoulis, G.A. A 3D-BEM coupled-mode method for WEC arrays in variable bathymetry. In Progress in Renewable Energies Offshore, Proceedings of the 2nd International Conference on Renewable Energies Offshore (RENEW2016), Lisbon, Portugal, 24–26 October 2016; CRC Press: Boca Raton, FL, USA, 2016; p. 365. [Google Scholar]
- Turkel, E.; Yefet, A. Absorbing PML boundary layers for wave-like equations. Appl. Numer. Math. 1998, 27, 533–557. [Google Scholar] [CrossRef]
- Yeung, R. Added mass and damping of a vertical cylinder in finite depth waves. Appl. Ocean Res. 1981, 3, 119–133. [Google Scholar] [CrossRef]
- Brooke, J. Wave Energy Conversion; Elsevier Science: Amsterdam, The Netherlands, 2003. [Google Scholar]
- Davis, A.F.; Thomson, J.; Mundon, T.R.; Fabien, B.C. Modeling and Analysis of a Multi Degree of Freedom Point Absorber Wave Energy Converter. In Proceedings of the 33rd International Conference on Ocean, Offshore and Arctic Engineering (ASME 2014), San Francisco, CA, USA, 8–13 June 2014. [Google Scholar] [CrossRef]
- Sergiienko, N.Y. Three-Tether Wave Energy Converter: Hydrodynamic Modelling, Performance Assessment and Control. Ph.D. Thesis, University of Adelaide, Adelaide, Australia, 2018. [Google Scholar]
- Backer, G. Hydrodynamic Design Optimization of Wave Energy Converters Consisting of Heaving Point Absorbers. Ph.D. Thesis, University of Gent, Ghent, Belgium, 2009. [Google Scholar]
- Blommaert, C. Composite Floating Point Absorbers for Wave Energy Converters: Survivability Design, Production Method and Large-Scale Testing. Ph.D. Thesis, University of Gent, Ghent, Belgium, 2018. [Google Scholar]
- Franzitta, V.; Curto, D.; Rao, D.; Viola, A. Hydrogen Production from Sea Wave for Alternative Energy Vehicles for Public Transport in Trapani (Italy). Energies 2016, 9, 850. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| WEC Design | Max {Performance Index} Flat Bottom | Max {Performance Index} Variable Bottom |
|---|---|---|
| Cylindrical | 11.29% | 11.41% |
| Nailhead-shaped | 15.38% | 15.74% |
| Disk-shaped | 13.66% | 14.11% |
| Elliptical | 14.73% | 15.11% |
| Egg-shaped | 10.63% | 10.82% |
| Conical | 17.70% | 17.92% |
| Floater-shaped | 9.87% | 10.10% |
| Semi-spherical | 13.30% | 13.39% |
| WEC Design | Max {Performance Index (Heave+Pitch)} Flat Bottom | Max {Performance Index (Heave+Pitch)} Variable Bottom |
|---|---|---|
| Cylindrical | 32.43% | 32.00% |
| Nailhead-shaped | 29.00% | 29.08% |
| Disk-shaped | 22.04% | 22.31% |
| Elliptical | 27.12% | 27.26% |
| Egg-shaped | 26.25% | 25.84% |
| Conical | 21.99% | 22.07% |
| Floater-shaped | 19.65% | 19.59% |
| Semi-spherical | 13.44% | 13.60% |
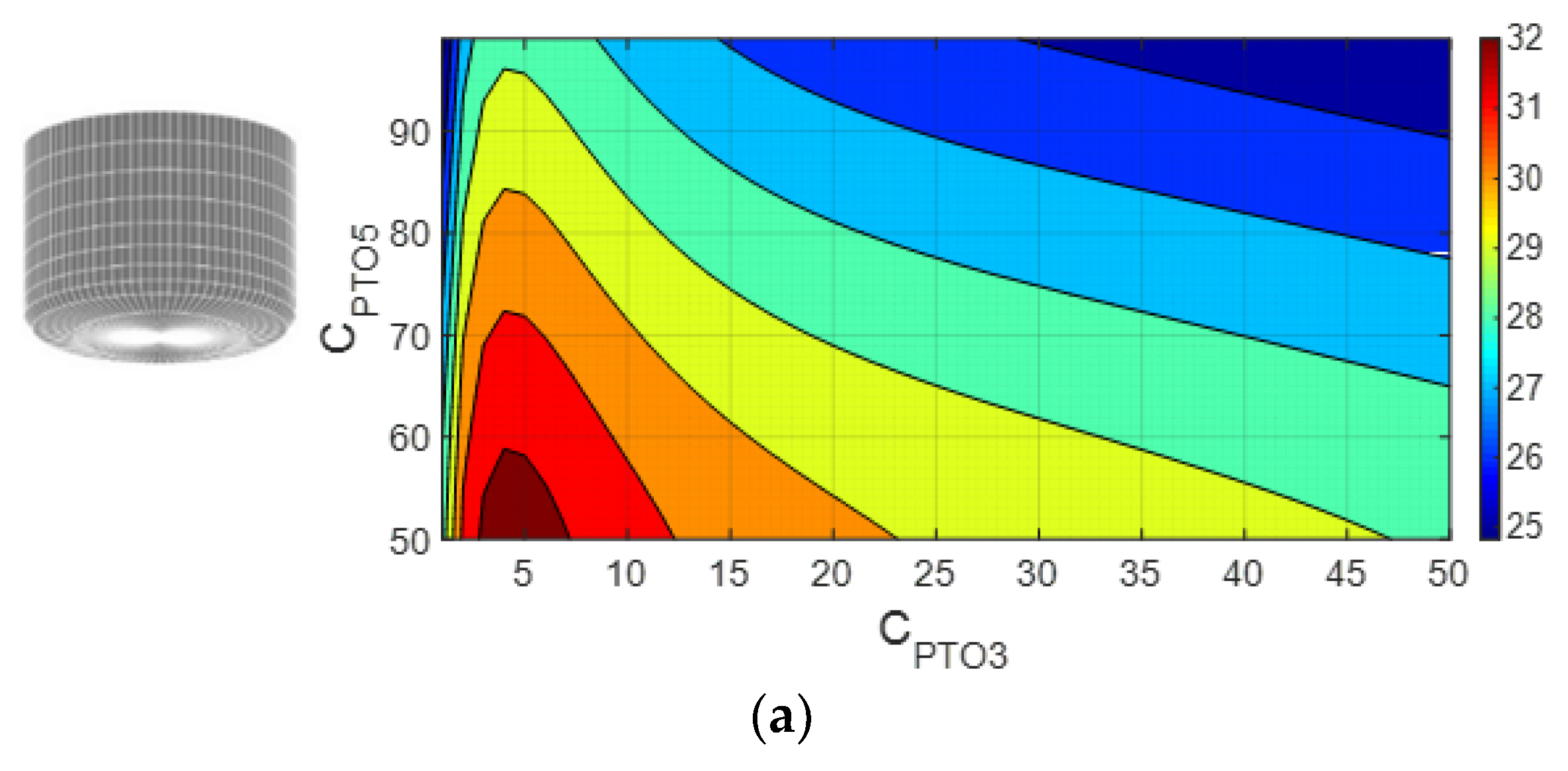
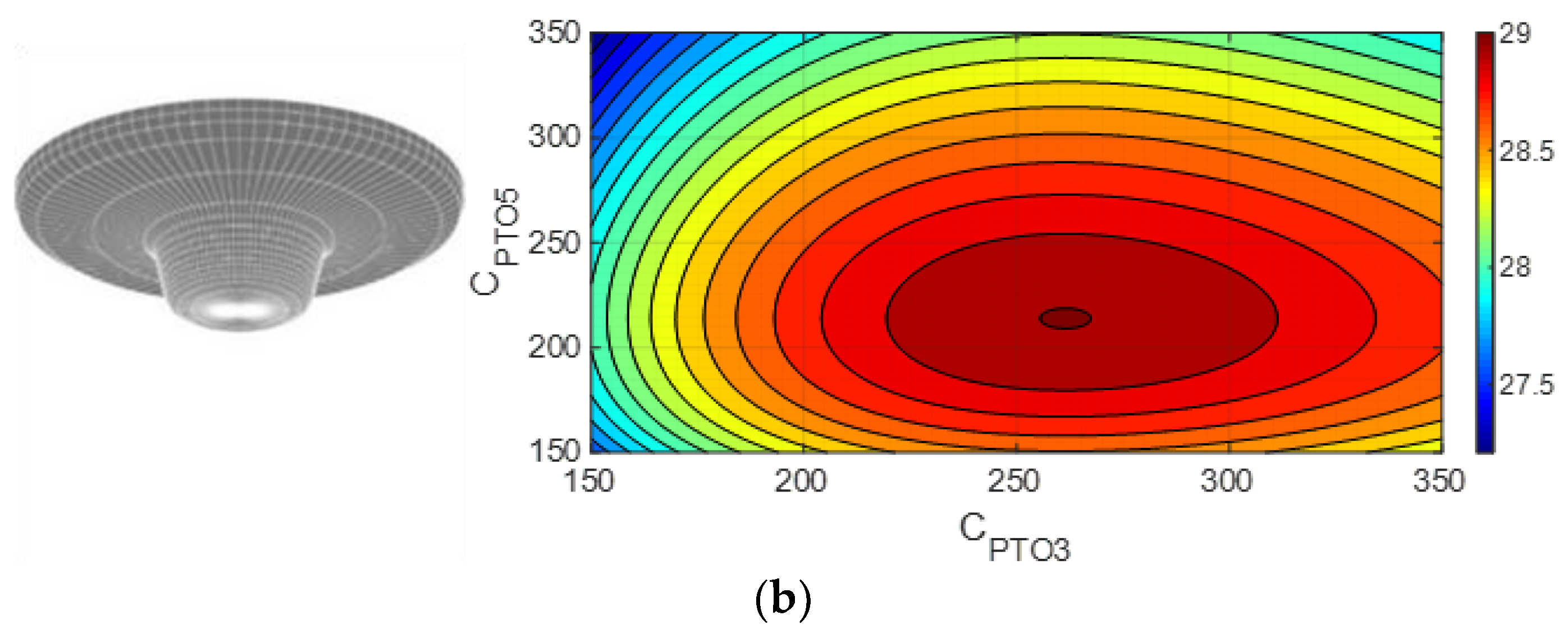
| Design & Performance | Cylindrical WEC | Nailhead-Shaped WEC | |
|---|---|---|---|
| Max{Performance Index (Heave+Pitch)} | Flat | 32.47% | 29.00% |
| Variable | 32.04% | 29.08% | |
| PTO damping coefficient: [CPTO3, CPTO5] | Flat | [4, 50] | [261, 214] |
| Variable | [4, 50] | [276, 213] |
| Type | Geometry | P.I. % Flat | δ P.I. % Steep vs Flat | δ P.I. % Steep vs Variable |
|---|---|---|---|---|
| Heaving WECs | Cylindrical | 11.3% | 6.2% | 5.2% |
| Conical | 17.7% | 3.1% | 0.8% | |
| 2-DOF WECs | Cylindrical | 32.4% | 0.3% | 1.6% |
| Nailhead-shaped | 29.0% | 0.1% | 0.4% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bonovas, M.; Belibassakis, K.; Rusu, E. Multi-DOF WEC Performance in Variable Bathymetry Regions Using a Hybrid 3D BEM and Optimization. Energies 2019, 12, 2108. https://doi.org/10.3390/en12112108
Bonovas M, Belibassakis K, Rusu E. Multi-DOF WEC Performance in Variable Bathymetry Regions Using a Hybrid 3D BEM and Optimization. Energies. 2019; 12(11):2108. https://doi.org/10.3390/en12112108
Chicago/Turabian StyleBonovas, Markos, Kostas Belibassakis, and Eugen Rusu. 2019. "Multi-DOF WEC Performance in Variable Bathymetry Regions Using a Hybrid 3D BEM and Optimization" Energies 12, no. 11: 2108. https://doi.org/10.3390/en12112108