1. Introduction
Energy conservation in subway systems has attracted great attention in recent years. as a great proportion of total energy is consumed by train traction systems [
1,
2,
3,
4], many measures have been taken to reduce traction energy consumption. The adoption of energy-efficient train operations has been a focus in the past decades [
5]. It aims to find a driving strategy which consumes the least energy. However, Regenerative Energy (RE) is not considered in these studies, which limits the effect of this method on energy conservation [
3,
6]. Regenerative energy is the electrical energy converted from kinetic energy by a regenerative braking system during the braking of trains. as a potential energy supply, regenerative energy can be used to accelerate trains. Regenerative energy takes a great amount of the total energy consumption in a subway system [
7]. Substation energy consumption can be reduced dramatically if the driving strategies of trains remain unchanged and the regenerative energy is fully utilized. Thus, with regenerative braking systems being widely applied in subway systems, optimizing Regenerative Energy Utilization (REU) has become a hot topic in recent years [
8]. Generally, there are three ways to do so [
9,
10,
11,
12].
The first one is to adopt Timetable Optimization (TO). It aims to coordinate the accelerating and braking of trains, thus the regenerative energy from braking trains can be utilized by the accelerating trains immediately. It is the most preferable way as its cost is the lowest according to [
8,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26]. However, RE cannot be fully utilized in this way in general, and the surplus regenerative energy is dissipated into heat via resistors.
The second way is to store regenerative energy temporarily by using wayside and/or on-board Energy Storage Systems (ESS), e.g., super-capacitors, and to reuse it later. Due to the advancement of power electronics and energy storage technologies, ESS can be integrated into subway systems to utilize regenerative energy more sufficiently. For example, Wayside Energy Storage Systems (WESSs) can store the surplus regenerative energy temporarily and deliver it back to accelerate trains in the same Electricity Supply Interval (ESI) when needed. Thus, Substation Energy Consumption (SEC) can be reduced. Furthermore, the stored energy in WESS can contribute to shaving power peaks during the acceleration of trains, and WESS can be used as a temporary electricity supplier in case of power grid failure. Thus, not only can WESS improve the efficient energy management, but it can also stabilize the power network [
10]. It becomes the second choice as it needs to pay for the cost of ESS and the rapid development of ESS that has happened in recent years.
The last way is to feed regenerative energy back into a utility grid network in a city through reversible power substations. Thus, the surplus regenerative energy can be used by other electricity facilities outside of a subway system. However, this is not yet diffused, as it needs to modify the substations greatly, which is complex and comes with high costs [
11].
The management of timetables and ESS belong to different departments in subway systems. Thus, they were developed and optimized separately in the past. Regenerative energy from braking trains can either be utilized by traction trains immediately or be stored in ESS for later use. Thus, when ESS is used in a subway subway system, the utilization of regenerative energy is different from without it. It is obvious that the configuration of ESS affects its effect on energy saving. In addition, note that the effect of ESS is also affected by the timetable used. As a timetable defines the schedules of all the trains, it determines the synchronization of traction and braking trains, which affects the regenerative energy that can be absorbed by ESS. Thus, when a timetable is changed, the effect of energy conservation is changed accordingly, even if the ESS remains unchanged. On the other hand, by absorbing and/or releasing electrical energy, ESS affects currents on the power supply line, thus the utilization of regenerative energy between traction and braking trains is also affected. Therefore, both timetable optimization and the configuration of ESS affect substation energy consumption, and their effects on energy saving interact with each other. However, the integration of timetable optimization and ESS has seldom been studied in the past literature. as will be shown in
Section 2, most of the studies on REU improvement focus on timetable optimization, a few talk about the configuration of ESS, and only very few of them study the integration of these two methods.
Motivated by the above, we present in this paper an integration optimization problem to reduce energy consumption in a subway system, which simultaneously uses timetable optimization and the application of WESS. To reduce the financial cost caused by WESS, we formulated a dual-objective optimization problem. An -constraint method together with an Improved Artificial Bee Colony (IABC) algorithm are designed to the problem, and numerical examples are conducted to show the effectiveness of the proposed methods.
The main ideas of this work are shown in
Figure 1. the main contributions are concluded as follows:
An integration of timetable optimization and WESS is proposed to maximize regenerative energy utilization, thus to minimize substation energy consumption in a subway system.
To maximize energy saving with the least cost, a dual-objective optimization model is thereby formulated to simultaneously minimize substation energy consumption and the total investment cost of WESSs. Note that a subway line is divided into several electricity supply intervals. One WESS is installed in each electricity supply interval. the size of each WESS can be different from each other, and both of them are greater than or equal to 0. Their total size determines the total cost of WESSs.
To solve the proposed dual-objective optimization problem, An -constraint method is first designed to transform it into several single-objective optimization problems. Then, An improved artificial bee colony algorithm is designed to solve these single-objective optimization problems sequentially.
Numerical examples are constructed based on the actual data obtained from a subway system in China to show the effectiveness of the proposed resolution methods. a set of Pareto optimal solutions is obtained. i.e., for each value of the total size of WESSs, the minimal substation energy consumption is determined, and the optimal configuration of each WESS and the correspondingly optimized timetable are obtained to reach the maximum energy saving.
The remainder of this paper is organized as follows. We review the related work on improvement of regenerative energy utilization in
Section 2. In
Section 3, a dual-objective optimization problem is proposed to simultaneously minimize substation energy consumption and the corresponding WESS costs, and a mathematical model for the proposed problem is formulated. To solve the dual-objective optimization problem, we design both an
-constraint method and an improved artificial bee colony algorithm in
Section 4. Then, numerical experiments are conducted in
Section 5 to show the effectiveness of the proposed method. Finally,
Section 6 concludes this paper and points out some future research directions.
2. Literature Review
In this section, we review the studies on improvement of regenerative energy utilization. as two main measures, timetable optimization and the application of energy storage systems are studied separately in the literature. However, their integration was not considered until recently. Consequently, a dual-objective optimization problem to minimize energy consumption and investment cost was also seldom studied. the main related publications are reviewed in the following.
An optimized timetable can improve regenerative energy utilization between traction and braking trains, hence reduce substation energy consumption in a subway system. In addition, the cost of timetable optimization is relatively low. Therefore, timetable optimization has been studied by many researchers to save energy [
7,
8,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27]. However, ESS was seldom considered in these studies, which limits their effects on energy saving. Furthermore, most of the studies are single-objective optimization problems and only a few of them are dual-objective optimization ones, which limits the resolution methods to be applied in our work.
In a single-objective timetable optimization problem to save energy, the direct objective is to maximize regenerative energy utilization, which may be represented by energy or the overlap time between trains’ traction and braking phases. Mathematical models of timetable and regenerative energy utilization are formulated in these studies, and the problems are usually solved by an analytical method or an intelligent algorithm, which are helpful for further research. For example, Ramos et al. [
13] present a timetabling problem to maximize the overlap time of the speed-up and slow-down actions of trains. Kim et al. [
15] propose a multi-criteria mixed integer program to minimize the peak energy consumed and to maximize regenerative energy utilization through timetable optimization. Pena et al. [
16] propose a timetable optimization model for an underground rail system to maximize regenerative energy utilization. Fournier et al. [
17] develop an optimization model to maximize regenerative energy utilization by subtly modifying dwell time for trains at stations, and a hybrid genetic/linear programming algorithm is implemented to tackle this problem. Yang et al. [
18] propose a cooperative scheduling model to maximize the overlap time of accelerating and braking processes of adjacent trains. Yang et al. [
21] formulate an integer programming model with real-world speed profiles to minimize traction energy consumption by adjusting dwell time. They coordinate the arrivals and departures of trains in the same electricity supply interval (ESI), such that regenerative energy is effectively utilized. a genetic algorithm (GA) is designed to solve their problems in both [
18,
21]. Zhao et al. [
20] develop a nonlinear integer program to maximize regenerative energy utilization, which searches for the optimal headway and dwell time at each station. Gong et al. [
23] present a timetable optimization model to maximize regenerative energy utilization with dwell time control, and GA is used to find a near-optimal solution.
Few studies on timetable optimization are dual-objective optimization problems, where energy conservation and passenger time are usually minimized at the same time. the way to formulate a dual-objective optimization model and the possible resolving method are referrable. e.g., Yang et al. [
8] propose a dual-objective timetable optimization model to coordinate up and down trains at the same station to improve regenerative energy utilization and reduce passenger waiting time. Two objectives are combined into one by a weighted-sum method, and it is solved by GA. Zhao et al. [
19] propose a dual-objective optimization problem to maximize regenerative energy utilization measured by the overlap time and to shorten total passenger time. Two objectives are combined into one through weighting, and a simulated annealing (SA) method is designed to solve it. Xu et al. [
24] propose a dual-objective optimization problem to minimize both passenger time and traction energy, by controlling running time at each section and dwell time at each platform. They adopt a weighted-sum method to combine two objectives into one, and designed a genetic algorithm to solve it.
Installing ESS also can improve regenerative energy utilization, thereby reducing substation energy consumption in subway systems. Therefore, few researchers have studied the application of ESS in subway systems. Although timetable optimization is seldom considered in these studies, the modelling method of ESS is referable to our work. Ceraolo et al. [
11] develop models to analyze the impact of regenerative braking in high-speed railway systems, where ESS is used. Feasibility of using wayside and on-board ESS is analyzed, respectively. They evaluate the cost-effectiveness of different solutions by taking into account the capital cost of the investment and annual energy saving. the results prove the effectiveness on improving regenerative energy utilization through ESS application. Ciccarelli et al. [
12] propose a control strategy for on-board super-capacitors integrated with motor drive control. Simulation results show its effectiveness on energy saving and reducing the voltage surge at the overhead contact line during train braking. Liu et al. [
28] propose a single-objective timetable optimization problem with application of WESS to minimize total energy consumption. An algorithm integrating tabu search and simulation is designed to solve it. Experimental results prove the effectiveness of WESS on energy saving. the model of WESS energy management is relatively simple in their work. Gao et al. [
29] propose a control strategy to use super-capacitors as WESS, which is helpful for WESS energy management. Huang et al. [
30] propose an energy-saving model to optimize trains’ speed profiles in a subway system. On-board ESS was used as a basis of their optimization problem and the running time is allowed to be optimized within a predefined window. a dynamic programming method is used to solve their problems. Kampeerawat and Koseki [
10] propose a single-objective optimization problem to reduce substation energy consumption, which raised the studies on integration of timetable optimization and WESS. a mathematical model is formulated to minimize a linear weighted sum of substation energy consumption and the energy capacity of WESS; then, GA is designed to solve their problem. Although different weight factors can be assigned in theory, it is hard to find all the non-dominated solutions for the original dual-objective optimization problem. Ahmadi et al. [
31] propose to reduce substation energy consumption in subway systems by simultaneous application of WESS and speed profile optimization. To demonstrate the validity of the proposed method, they first optimized the configuration of WESS together with the real world (i.e., non-optimized) speed profiles to reduce substation energy consumption. Then, the speed profiles and the configuration of WESS were simultaneously optimized. GA was used to solve their problems. Experimental results prove that substantial reduction in substation energy consumption was achieved and total size of WESS is decreased when speed profiles were optimized in comparison with the non-optimized speed profiles.
From the above we can see that the integration of timetable optimization and WESS is very few in the existing studies, which highlights the first feature of our work. i.e., the energy saving strategy proposed in this work, which combines timetable optimization and WESS, is challenging and different from the existing studies. Consequent on the integration of the two different methods, to simultaneously minimize substation energy consumption and the financial cost of WESS, a dual-objective optimization problem is proposed, which is also innovative. Furthermore, to solve a dual-objective optimization problem, a weighted-sum method is often adopted in the previous studies to transform it into a single-objective optimization problem, where the optimal solutions are limited by the weights adopted. While in this work we design an
-constraint method to transform the original dual-objective optimization problem into several single-objective ones, then the Pareto front is able to be obtained in theory [
32,
33]. Finally, instead of applying the most frequently used genetic algorithm to solve the single-objective optimization problems, An improved artificial bee colony algorithm is designed and experimental results prove its better performance over a genetic algorithm.
4. Resolution Method
There are several techniques to solve a multi-objective optimization problem [
32,
37,
38,
39,
40]. The most popular and straightforward one is a weighted-sum method. It converts the former into a single-objective optimization problem by using a linear weighted sum formulation that combines all the objectives. Then, the single-objective optimization problems can be solved by using an analytical method, or commercial software (e.g., CPLEX), or an intelligent optimization algorithm. A weighted-sum method together with GA are frequently used in solving dual-objective problems in subway systems [
8,
24,
41]. However, the weights are hard to decide sometimes. Moreover, this method is inappropriate if not all objectives can be represented via a linear combination, and it is ill-suited for a multi-objective problem with non-convex objective space [
32,
42].
Another well-known technique to solve a multi-objective optimization problem is an
-constraint method. This method is first introduced by Haimes et al. [
43], some good application examples can also be found in [
38,
44]. In solving a multi-objective optimization problem, it aims to optimize only one primary objective each time, and the other objectives are transformed into constraints. by gradually changing the constraints with a step length of
, a series of optimal results can be obtained. Thus, a set of Pareto optimal solutions can be found for the original multi-objective optimization problem. It is very convenient to be applied in the resolution of a dual-objective optimization problem. Since its first use to solve a dual-objective shortest path problem [
45], it has been successfully applied to solve many problems [
32,
38,
45,
46,
47,
48,
49]. Note that the dual-objective substation energy-consumption optimization problem presented in this work is a dual-objective problem with discrete decision variables (integers), and objective (
27) is obviously linear. Thus, its Pareto front is able to be obtained by using an
-constraint method in theory [
32,
33]. Therefore, An
-constraint method is designed to transform the dual-objective substation energy-consumption optimization problem into several single-objective optimization problems.
To solve these single-objective optimization problems, An improved artificial bee colony algorithm is designed. by combining the -constraint method and the improved artificial bee colony algorithm, the non-dominated solutions of the dual-objective substation energy-consumption optimization problem are obtained.
4.1. -Constraint Method
As our main objective is to minimize substation energy consumption in a subway system, we treat objective (
26) in problem
P as the primary objective, and objective (
27) is converted into a constraint. In this way, the initial dual-objective substation energy-consumption optimization problem can be transformed into the following single-objective optimization problems by applying an
-constraint method. the detailed procedure of applying the proposed
-constraint method is shown in Algorithm 1, and the obtained single-objective optimization problems are listed as follows. Note that only one objective in the original dual-objective optimization problem is kept in each single-objective optimization problem, the other objective is either dismissed or converted into a constraint. the order to solve the single-objective optimization problems is also important, as the solution of the previous problem may be used in the following problems.
Note that the objective
in this problem is corresponding to objective (
26) in problem
P, and objective (
27) in problem
P is not considered in this problem. by solving problem
, we obtain the minimal value of
denoted as
. It represents the minimal substation energy consumption when sufficient WESS is installed.
Note that the objective
in this problem is corresponding to objective (
27) in problem
P, and objective (
26) in problem
P is not considered in this problem. by solving problem
, we obtain the minimal value of
K denoted as
. By using an analytical method, it is easy to obtain that
. It represents the minimal number of BESM installed in a subway system, when substation energy consumption is not considered. Note that objective vector
is the ideal point of problem
P. It represents the lower limit of the Pareto front, which is unreachable.
Note that objective (
26) in problem
P is transformed into constraint (
35) in this problem. by solving this problem, we obtain its optimal result denoted as
. It represents the minimal number of BESMs needed while substation energy consumption is optimally minimized. Thus, (
,
) is a non-dominated point of problem
P. Substation energy consumption cannot be reduced by further increasing the number of BESMs.
Note that objective (
27) in problem
P is transformed into constraint (
36) in this problem. by solving this problem, we obtain the optimal result of
denoted as
. Note that (
,
) is also a non-dominated point of problem
P. It represents the minimal substation energy consumption when a minimal number of WESS is installed. as
,
is the minimal substation energy consumption when a timetable is optimized and no WESS is installed.
Note that objective (
27) in problem
P is transformed into constraint (
37) in this problem. Problem
aims to minimize substation energy consumption with a limited number of BESMs. by solving it, we obtain the optimal result denoted
. as
can be assigned with different values, problem
represents a series of problems. with
decreasing from
to
, we obtain a series of optimal results of problem
. Each pair of (
,
) is a non-dominated point of problem
P. Thus,
constitutes the Pareto front of problem
P. Note that
and
K is a non-negative integer in this work.
| Algorithm 1 Procedure of applying the -constraint method |
Input: Mathematical model of problem P
Output: %Non-dominated points on Pareto front- 1:
Transform problem P into problems , , , and ; - 2:
Solve problems , , and sequentially to obtain the optimal results , , and , respectively; - 3:
Set ; - 4:
for to do - 5:
Set ; - 6:
Solve problem to obtain the optimal result ; - 7:
end for - 8:
Remove dominated points from and output the remaining as the Pareto front of problem P;
|
According to [
50], one drawback of an
-constraint method is that an improper selection of
may result in a formulation with no feasible solution in general. Fortunately, the second constraint in our dual-objective optimization problem, i.e., (
27) in problem
P is a linear function, and its decision variables are all non-negative integers. Thus, its objective value
K is definitely a non-negative integer too, i.e., the changing step length of
can be set to 1 naturally and the complete set of Pareto optimal solutions is able to be obtained correspondingly, providing the exact solution for each single-objective optimization problem can be obtained. In addition, For any non-negative value of
K, there is always at least one feasible solution for each
satisfying
. e.g., one possible solution is
and
. Furthermore, whatever value is
K, the timetable currently used in a subway system is always a feasible solution to (
26). Thus, the drawback of potentially no feasible solution in an
-constraint method does not exist for our dual-objective optimization problem.
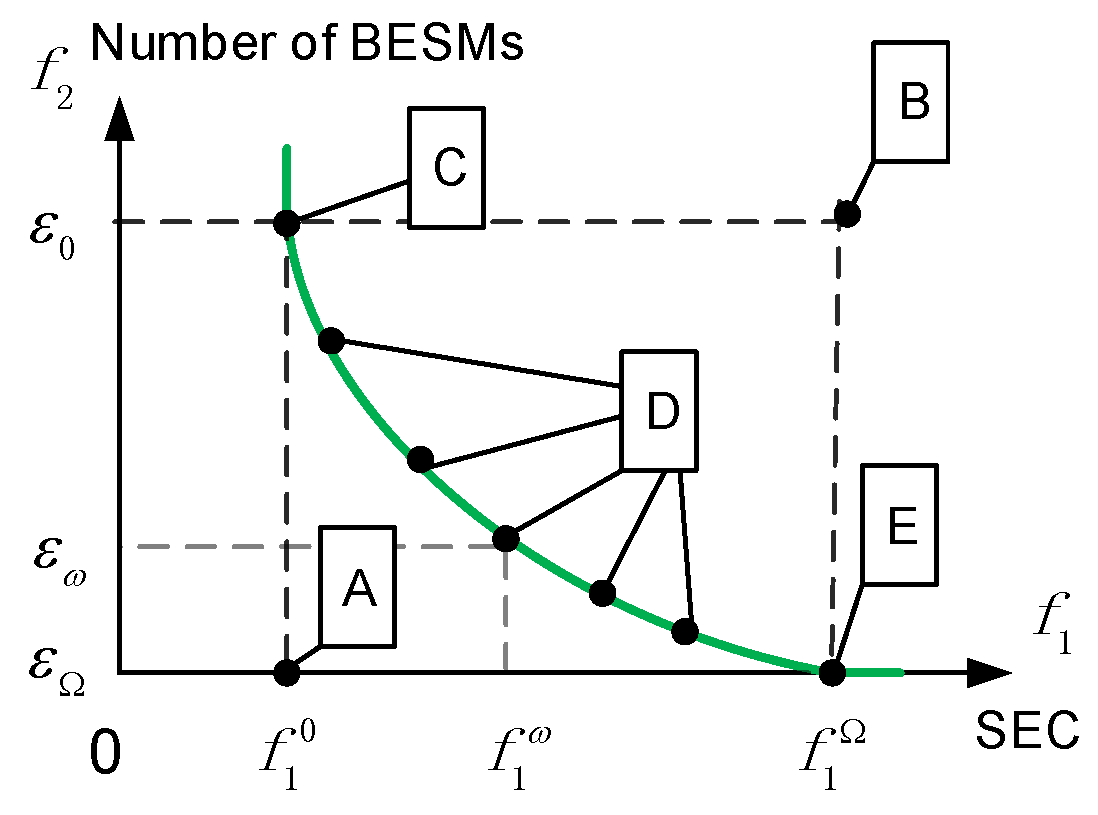
The results obtained by applying an
-constraint method are illustrated in
Figure 6. Point A is the ideal point and B is the nadir one of the dual-objective optimization problem. Points C and E are the end points on the Pareto front. Note that point D represents a typical point on the Pareto front. With
changes from
to
,
is changed from
to
correspondingly, thus point D can be any point on the green curve in
Figure 6.
The procedure of applying an -constraint method to transform a dual-objective optimization problem P into several single-objective ones (i.e., problems to ) is detailed as follows. Note that the first objective in problem P (i.e., substation energy consumption) is treated as the primary objective.
4.2. Improved Artificial Bee Colony Algorithm
For the single-objective optimization problems transformed from problem
P, except
, all the other problems (i.e.,
,
,
and
) are nonlinear. It is hard to find an optimal solution by using commercial software (e.g., CPLEX) within an acceptable time. Thus, heuristic algorithms are often used to find near-optimal solutions for these kinds of problems [
8,
10,
17,
18,
19,
20,
21,
22,
23,
24,
25].
An Artificial Bee Colony (ABC) algorithm is a swarm intelligence algorithm. Since 2005 [
51], it has been successfully used to handle many complicated optimization problems [
52,
53,
54,
55,
56,
57,
58]. It has been compared with differential evolution (DE) [
59,
60], GA [
25,
53,
61], particle swarm optimization (PSO) [
62,
63] and evolutionary algorithm (EA) [
64] for multi-dimensional numeric problems. Its performance is better than or similar to these algorithms. Therefore, An improved artificial bee colony algorithm is designed to solve the single-objective optimization problems in this work.
The proposed IABC starts with an initial set of feasible solutions, where one of them is the currently used timetable with no WESS, and the others are randomly generated. There are three kinds of bees, i.e., employed, onlooker and scout bees, used in an optimization process. In each iteration, each employed bee is employed at a particular solution, and finds a neighbor one via a local search operator, which is randomly chosen from swap, insertion, mutation and crossover operators; each onlooker bee chooses a solution by spinning a roulette wheel, and then finds a neighbor one with the same procedure as an employed bee; each scout bee randomly generates a feasible solution, to enhance IABC’s global search ability. the best solution found by all bees is kept as an initial one in the next iteration. When the iteration count reaches a predefined threshold, the algorithm restarts. Note that all the solutions, except the best one found, are replaced by randomly generated ones. IABC terminates when the restart count reaches a predefined limit. Then, the best solution found is output as an optimal result. The main procedure of IABC is shown in Algorithm 2. The detailed procedure of IABC can also be found in our previous work in [
7].
,
and
are the numbers of employed, onlooker and scout bees, respectively;
is the total number of all bees, i.e.,
;
,
,
and
are the probability of swap, insertion, mutation and crossover operators been chosen, respectively;
and
are predefined iteration count limits;
is a specified initial solution;
and
are one of
solutions, respectively;
and
are the optimal solution found and its fitness value, respectively.
| Algorithm 2 Procedure of IABC |
Input:, , , , , , , , , ,
Output:- 1:
Set ; %init the best solution found - 2:
for to do - 3:
if then - 4:
for to do - 5:
Randomly generate a feasible solution ; - 6:
end for - 7:
end if - 8:
for to do - 9:
Calculate the fitness value for each solution ; - 10:
end for - 11:
Sort , , ⋯, in ’descend’ order and pick out the first number of elements to generate a list ; - 12:
Generate a list containing the number of solutions corresponding to ; - 13:
Set = ; %record the best solution - 14:
Set ; %Fitness value of the best solution %employed bee phase - 15:
for to do - 16:
Set solution ; - 17:
Generate from via a local search operator randomly chosen from swap, insertion, mutation and crossover; - 18:
end for %onlooker bee phase - 19:
for to do - 20:
Set as a solution in by roulette wheel selection; - 21:
Generate from via a local search operator randomly chosen from swap, insertion, mutation and crossover; - 22:
end for %scout bee phase - 23:
for to do - 24:
Randomly generate a feasible solution ; - 25:
end for - 26:
end for - 27:
Output and ;
|
The currently used timetable without WESS is used as an initial solution and the idea of elitism is adopted in IABC, to ensure the optimized solution is not getting worse than it. In each iteration, all solutions are evaluated and sorted based on their fitness values. A list containing
best solutions is generated accordingly. Then, each employed bee is assigned to a specific solution in the list sequentially, and a new solution is generated by applying a local search operator. The local search operator is randomly chosen from swap, insertion, mutation and crossover operators with the probability of
,
,
and
, respectively. To ensure each newly generated solution is feasible, i.e., satisfying constraints (
28)–(
34), its feasibility is checked immediately and repair is applied if it is infeasible. Similarly, each onlooker bee generates a new solution based on an assigned solution in the same way. The difference between employed and onlooker bees is as follows: the former is associated with a particular solution in the best solution list, and the latter randomly chooses one in the list by spinning a roulette wheel. A scout bee randomly generates a feasible solution in each iteration to ensure the global search ability of IABC. IABC converges to a local optimum in
iterations. Then, the best solution found so far is kept and the other solutions are replaced by randomly generated feasible ones, to reduce the chance of IABC being trapped in a local optimum. Thereafter, a similar process repeats until the total iteration count reaches
. Finally, a near-optimal solution and its fitness value are obtained.
5. Experimental Results and Analysis
To show the effectiveness of the proposed method, numerical examples are conducted based on the actual data obtained from Yanfang Line in Beijing, China. The actual dwell time at each platform and running time at each section are shown in
Table 1. Note that
is dwell time at a departure platform with index
n,
and
being its lower and upper bounds in the optimization process, and
is the running time from platform
to
. They are the same for all trains. The headway time and other parameters of Yanfang Line are listed in
Table 2. Note that headway time between any two successive trains is identical in the current timetable. The sections in each electricity supply interval are given in
Table 3. A super-capacitor is selected as a BESM in this work. Parameters about WESS are shown in
Table 4.
Parameters of IABC are set as shown in
Table 5. GA is also applied to solve the single-objective optimization problems as a baseline method. The detailed processes of GA can be found in [
21]. To compare IABC and GA fairly, the population size of GA is set to be 40 and its maximum iteration count is 300. The local search operators used in GA include selection, crossover and mutation. The probability of crossover and mutation are
and
, respectively.
Compared with identical dwell time, more energy can be saved when dwell time at a platform varied for different trains. But regenerative energy utilization improvement is relatively limited, and it increases the solution space of an optimization problem dramatically [
25]. Thus, in order to simplify the problem and keep consistent with the actual timetable, we keep the dwell time for different trains
i and
j at platform
n identical in the experiments. i.e.,
,
and
.
The experiments are implemented in MATLAB 2014 and runs on a notebook with Intel(R) Core(TM) i5-3210M CPU @ GHz, 12 GB RAM and a Windows 7 Operating System.
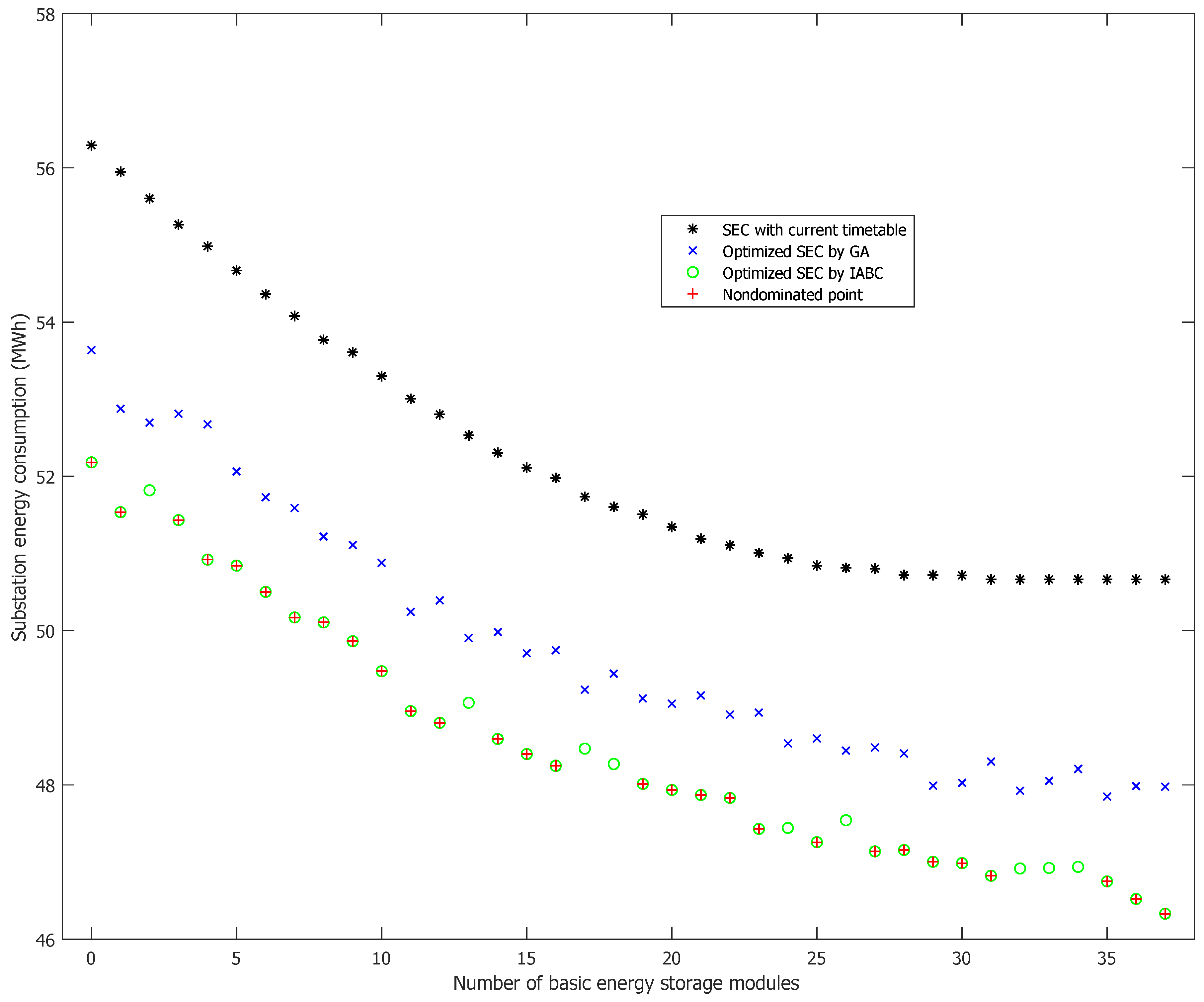
The simulation results are are shown in
Figure 7. Note that there are several WESS in a subway line, different WESS may have different number of BESMs. The horizontal axis in
Figure 7 is the sum of the BESM numbers in each WESS. The number of BESMs equals 0 means there are no WESS installed at all. When it is greater than 0, the detailed configuration in each WESS should be obtained in the optimized solution. The vertical axis is the substation energy consumption. A black asterisk in
Figure 7 denotes substation energy consumption with the current timetable (i.e., the timetable is not optimized). Note that the configuration of each WESS is set as the optimized result, as there does not exist an actual configuration of WESS for each case. A blue cross denotes an optimized result obtained by GA where timetable and WESS are simultaneously optimized, a green circle denotes an optimized result of our dual-objective optimization problem obtained by IABC, and a red “+ “ in a green circle denotes a non-dominated point on the Pareto front of problem
P.
From the experimental results, it is easy to see that: (1) Substation energy consumption decreases with the total size of WESS increases, and the decreasing speed gradually slows down. (2) With the same size of WESS installed, timetable optimization further reduces substation energy consumption, which shows the effectiveness of the integration optimization of timetable and WESS. (3) IABC and GA can both to solve the single-objective optimization problems, and IABC performs better than GA, as the results obtained by IABC dominate those obtained by GA. (4) A set of Pareto optimal solutions of the dual-objective optimization problem is obtained by applying the proposed -constraint method and IABC. The non-dominated points are diverse and well distributed over the Pareto front.
Set the current timetable with no WESS installed, which is the actual conditions in the experimental subway line, as a basis for comparison, substation energy consumption reduces by when timetable is optimized without WESS invested, optimization of WESS with total size as 37 BESMs reduces substation energy consumption by when timetable is optimized, and the decrement comes to when timetable is optimized together with 37 BESMs installed as WESS. Thus, timetable optimization and WESS installation can both improve energy conservation, and the integration of them reaches the greatest extent. Note that the results we obtained is a set of Pareto optimal solutions, each element of them reduces substation energy consumption to different degrees with different WESS investment cost. The experimental results are helpful for optimal decision making. Based on relationship between energy conservation profit and WESS cost, decision makers can easily choose a preferred solution according to their particular needs, e.g., the solution with the lowest cost, the one with the greatest profit, or that with the best cost-effectiveness.
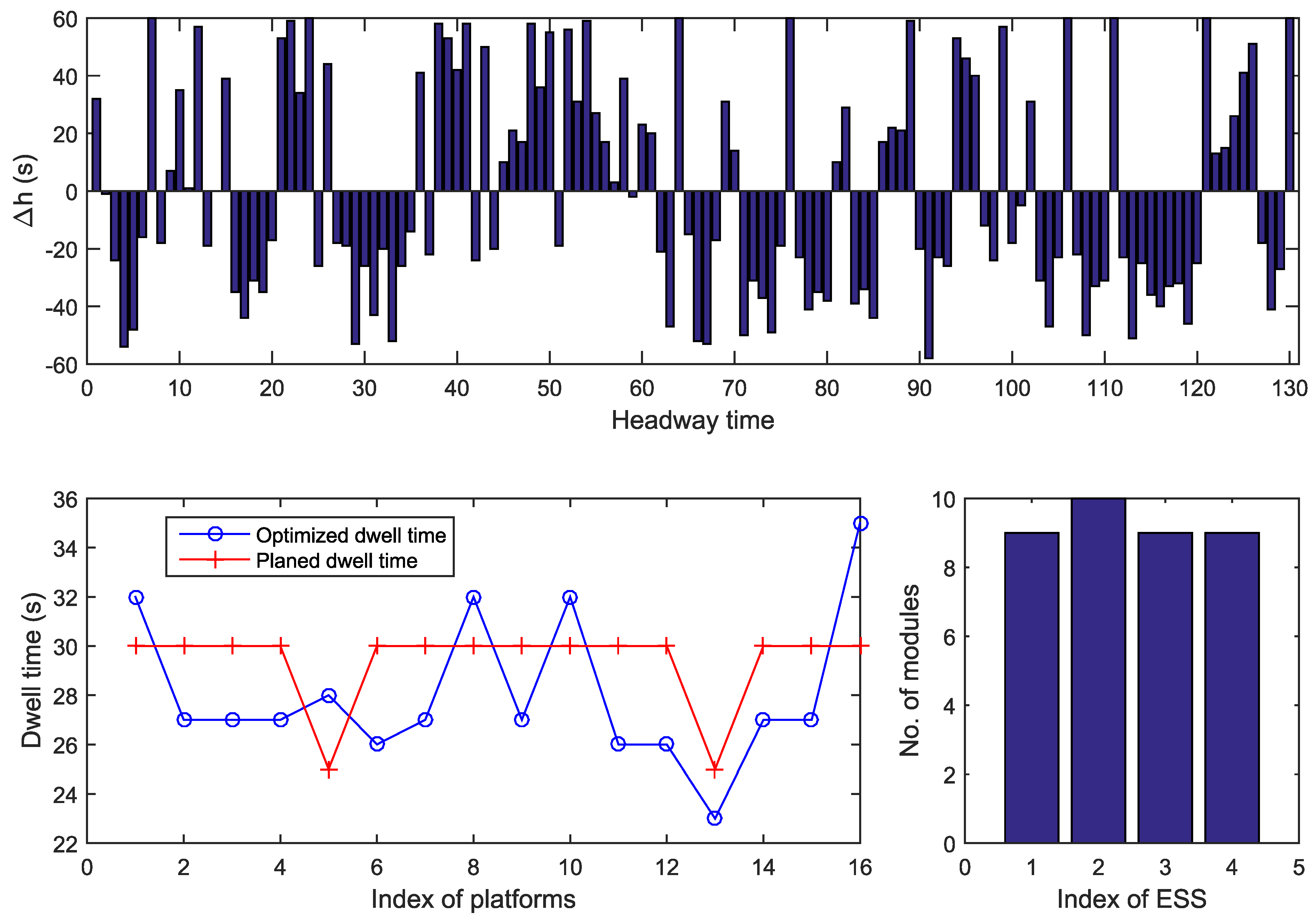
As an illustration of one optimized solution, the optimized timetable and configuration of each WESS when the total number of BESMs as
are given in
Figure 8. The upper part shows the difference between the optimized headway time and that in the current timetable; the lower left part shows the optimized dwell time and the current dwell time; in addition, the lower right part shows the numbers of BESMs in each WESS, note that there are four electricity supply intervals in this subway line, which means four WESSs are installed. It is seen that the headway time and dwell time are slightly changed from the current timetable, and the configuration for each WESS is proposed. Note that there are several electricity supply intervals in a subway system, and one WESS is installed in an electricity supply interval. Thus, there are several WESSs in a subway system (e.g., WESS 1 to
z). As each WESS is independent from others, they can have different capacities (i.e., number of BESMs) in theory.
The profiles of the state-of-charge of each WESS are shown in
Figure 9. The peak values of all WESS are between 90–100%. There is some residual capacity, but it is very small. Thus, this kind of WESS configuration is reasonable for regenerative energy utilization, i.e., if the total number of BESMs is reduced, some regenerative energy may not be able to be utilized; and if the number was increased, the increased energy capacity would be a waste of money.
A real-world subway line is often subject to minor real-time perturbations which affects the adherence to the timetable [
7,
17]. The presence of unexpected disturbances brings uncertainties to scheduling optimization problems [
65,
66], which may affect the effectiveness of the optimized results. To make it clear, the problem and method proposed in this work are intended to be used offline indeed, which means the optimization problem is solved only once before trains go into operation and the potential uncertainties are not particularly considered. However, the offline method is still of great significance, as the size of each WESS is hard to be changed over time; it should be decided at the first stage of design.
To solve the potential uncertainties in real-world application, there are two alternative ways. One is to adopt a real-time optimization method [
65,
66], e.g., using a receding horizon principle to optimize the timetable iteratively; the other is to evaluate the robustness of the optimized results on disturbances and subject to it if acceptable (i.e., the optimized results are not too sensitive to disturbances). It is relatively complicated to introduce an online optimization method in this work, so we leave it as our future work direction and adopt the second method here.
To evaluate the robustness of the optimized timetable, we conduct the following experiments by adding random noise to it. In the experiment, we traverse the headway time and dwell time vector and add a random number to each element in it. The random number is randomly chosen from set
(s), which represents an actual noise. As a comparison, we add this king of noise both on the current timetable and the optimized one, and
is assigned with different values to compare their effects on energy conservation. To be justified, we run the experiment 100 times with each value of
and their average substation energy consumption is obtained, respectively. The experimental results with
varies from 0 to 3 are given in
Table 6.
Note that represents no noise added on the timetable. It is seen that the energy saving ratio slightly decreases when the disturbance on train operations becomes larger. However, even with 3-s of noise, the energy saving ratio is still around for the optimized timetable over the current one. Thus, the optimized result is robust enough for energy conservation under disturbances. The proposed offline optimization method is obviously acceptable to this particular problem.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}