In DFIGs, the common mode voltage of the converter is applied to the rotor winding. The stray capacitances of the generator constitute the coupling paths of the common mode voltage to the bearing. In order to analyze the bearing currents of DFIG, the stray capacitances of the generator should be acquired. The calculation accuracy of the capacitances would affect the prediction accuracy of bearing currents.
3.1. Stray Capacitances of Doubly-Fed Induction Generator (DFIG)
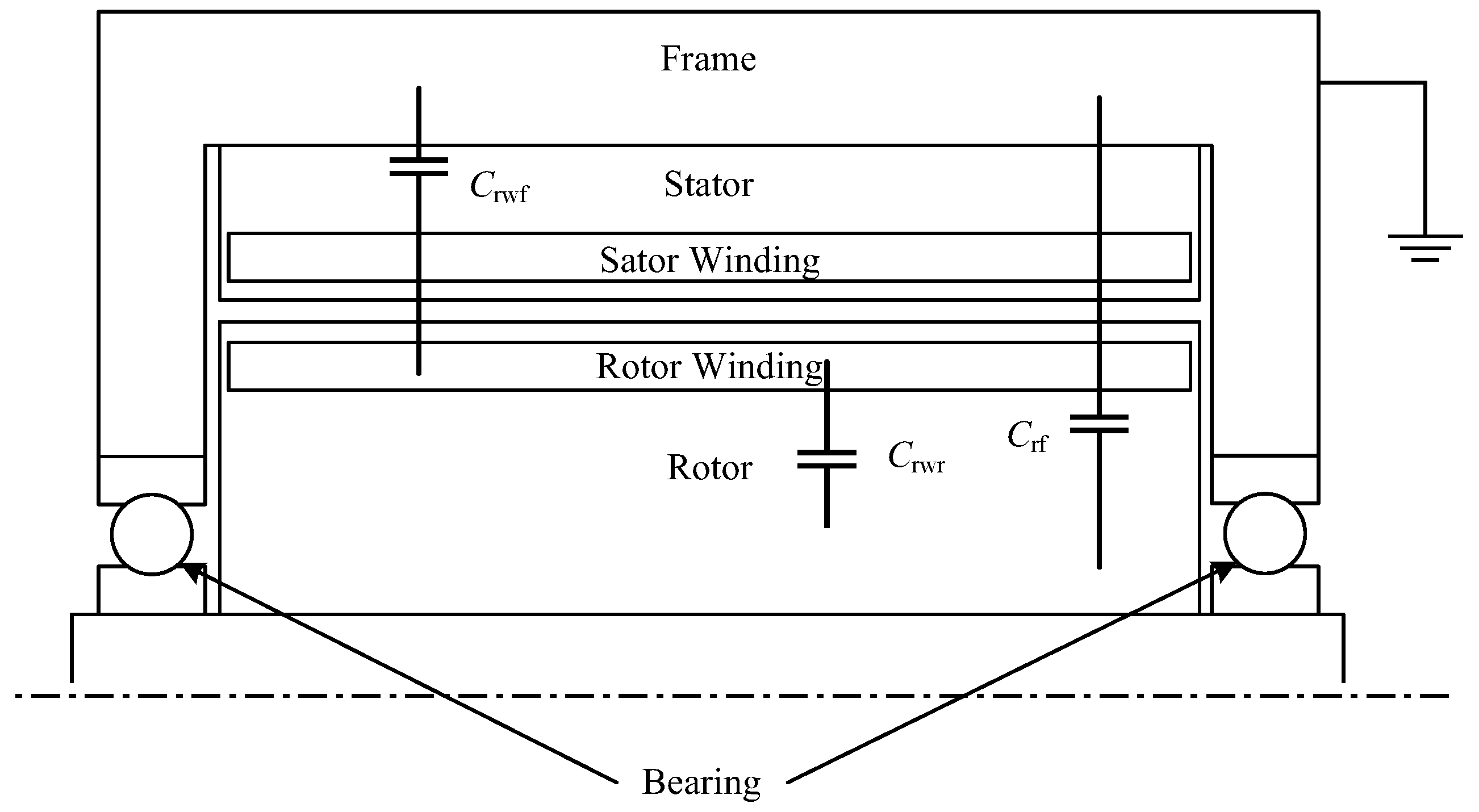
In DFIGs, there are four parts of the conductor, namely, the stator winding, rotor winding, rotor core, and stator core. The stator core connects to the frame and the rotor core connects to the shaft. Then, the stator core and frame are at the same electric potential, and the rotor core and shaft are also at the same potential. According to the partial capacitance theory of multi-conductor systems, the dielectric materials between the two conductors can induce stray capacitance. Therefore, there are three stray capacitances—
Crwf,
Crwr, and
Crf—in DFIGs, where
Crwf is the capacitance between the rotor winding and the frame,
Crwr is the capacitance between the rotor winding and the rotor core, and
Crf is the capacitance between the rotor core and the frame. The stator winding has no influence on other parts. The specific capacitance distribution in the DFIG is shown in
Figure 5.
Due to the complex structure of the generator, it is not easy to obtain an accurate result from the analytical method, as in [
17]. Since the materials and the shapes of different parts are not as simple as the plate capacitor, the assumption used in the analytical method would cause errors. In order to obtain the accurate stray capacitances of the DFIG, the electromagnetic field numerical calculation based on the finite element method (FEM) is adopted in this paper.
Ignoring the generator end effect, a 2D model can be built in ANSYS Maxwell (Version, 16.0,ANSYS, Pittsburgh, PA, USA) based on the generator structure parameters. The electrostatic field solver is adopted. The boundary problem of electric potential
φ satisfies following Poisson equation, where
x,
y are coordinates in space:
The stator core is taken as the reference; the rotor winding and rotor core are taken as independent conductors applying different voltages. We set the matrix parameter solving item, then set the proper mesh subdivision of the solution domain and perform the numerical calculation. The electrostatic induction coefficient matrix [
β] can be obtained, which contains following elements:
where the subscript rw indicates the rotor winding and r indicates the rotor core.
βrw is the induction coefficient between rotor winding and reference conductor,
βr is the induction coefficient between the rotor and reference conductor,
βrw_r is the induction coefficient between the rotor winding and rotor. According to the theory of the partial capacitance of multi-conductors, the stray capacitances in the DFIG can be deduced from coefficients of electrostatic induction:
To acquire the actual results, the above values should multiply the generator’s effective axial length.
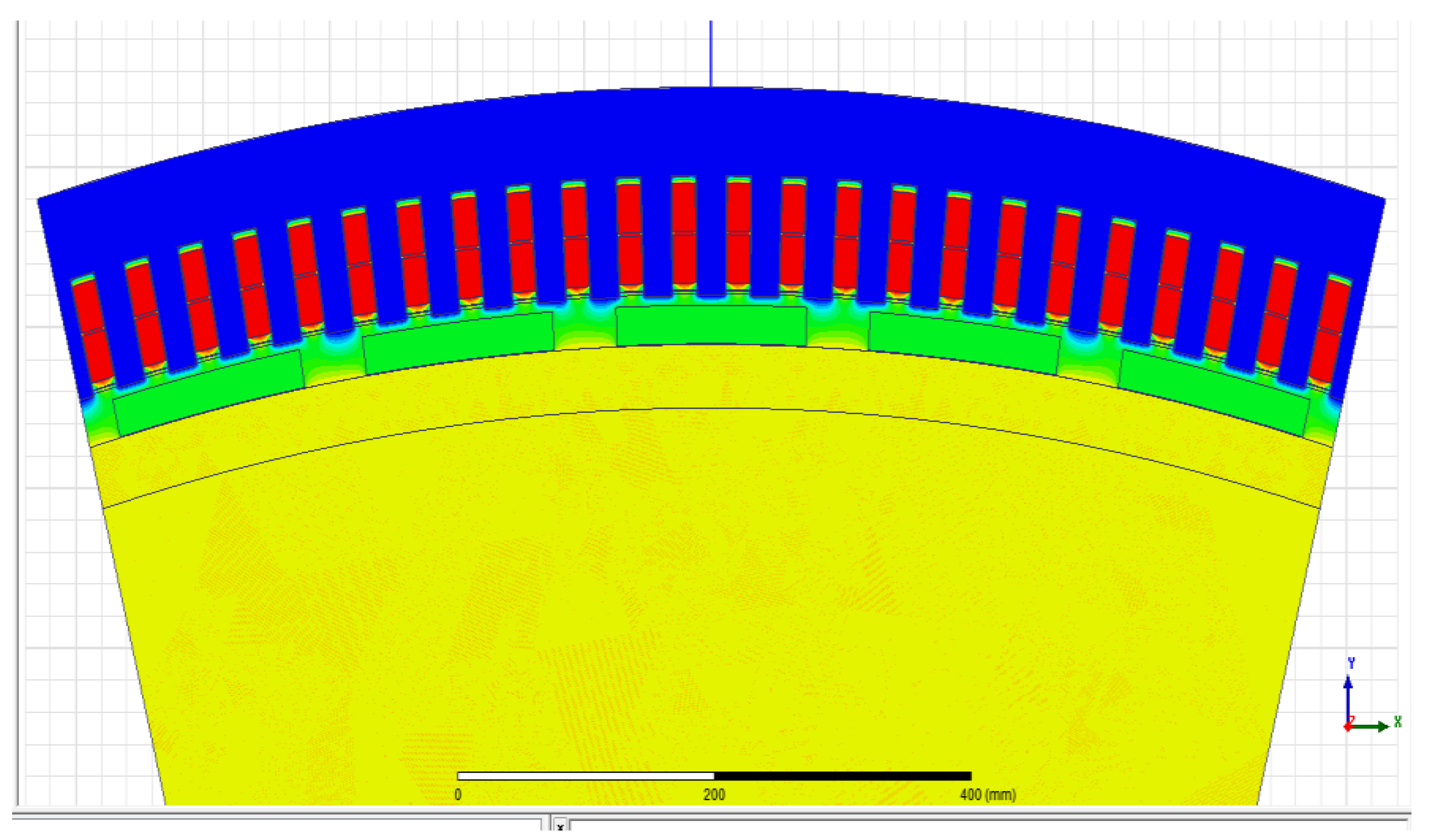
The stray capacitances of a 1.5 MW DFIG are calculated through the above method. The generator model is shown in
Figure 6, where the insulation material in the generator is accurately described. The parameter of the DFIG is shown in
Table 2.
With the finite element numerical calculation, the stray capacitances of the DFIG are obtained as shown in
Table 3.
Among three capacitances, Crwr is much greater than the two other capacitances. This is because Crwr is the capacitance between the rotor core and rotor windings. Comparing the two other capacitances, the insulation distance is shorter, the conductor surface is greater, and the permittivity is larger. All of these factors cause Crwr to be much greater than the two others. Crwr is a critical capacitance in the bearing current problem of DFIGs.
3.2. Bearing Current Model of the DFIG
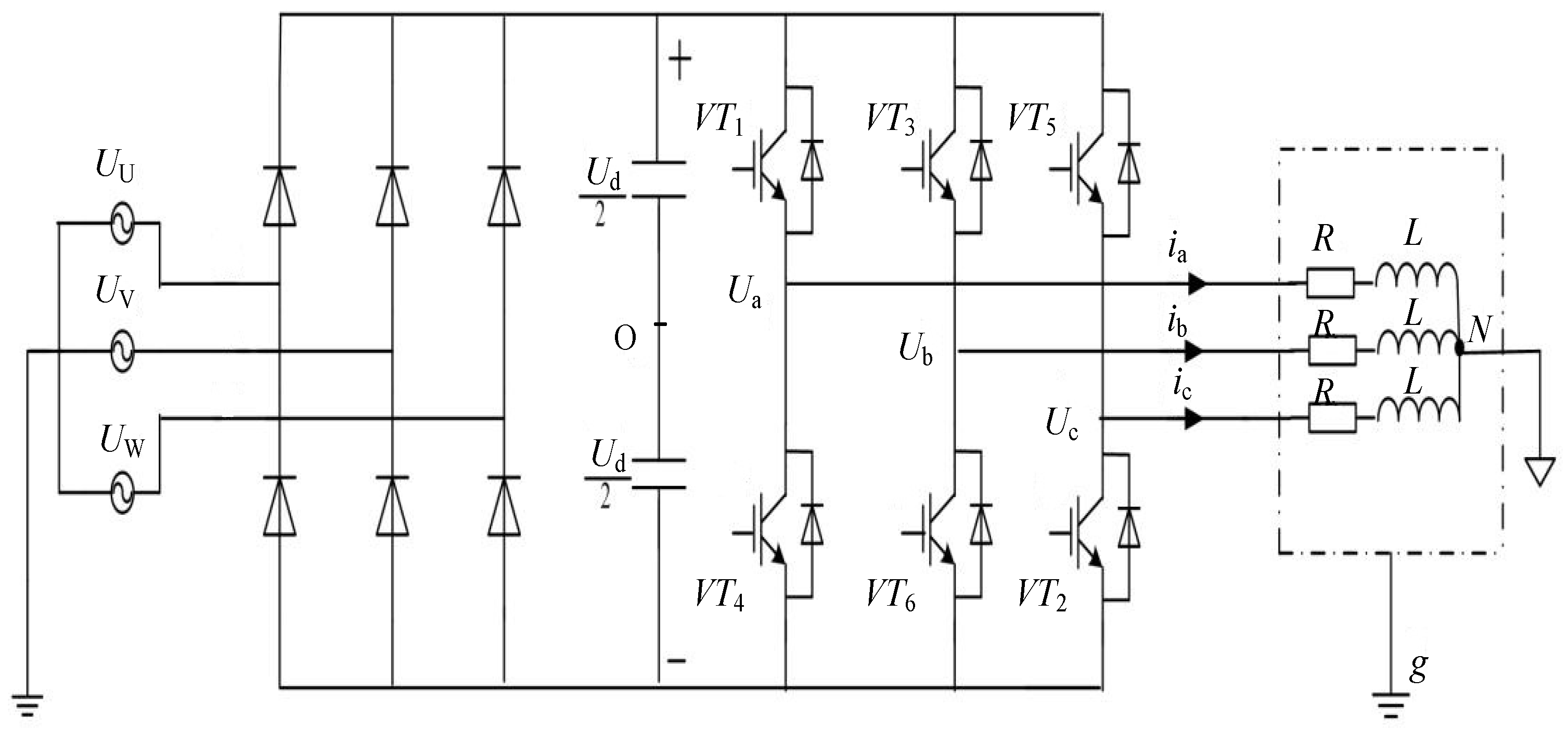
The rotor windings of the DFIG are connected to the converter. The common mode voltage of the converter exists at the neutral point of the rotor windings and the ground. Coupled by the generator stray capacitances, common mode voltage induces the voltage on the rotor shaft. Common mode current will return to the convertor. Assuming the frame of the generator is well grounded, the equivalent common mode circuit of the DFIG is shown in
Figure 7.
In
Figure 7,
Vcom is the common-mode voltage of the converter; RW denotes rotor windings; R denotes the rotor core; and F denotes the frame. The bearing inner raceway connects the shaft, namely, the bearing inner raceway is at the same potential as the rotor core. The bearing outer raceway connects the stator end cover, namely, the outer raceway is at the same potential as the stator core and frame. Balls of the bearing separate the inner raceway and outer raceway; lubricating grease exists on the balls and raceways. When the bearing oil film has integrity, the bearing can be taken as a capacitance.
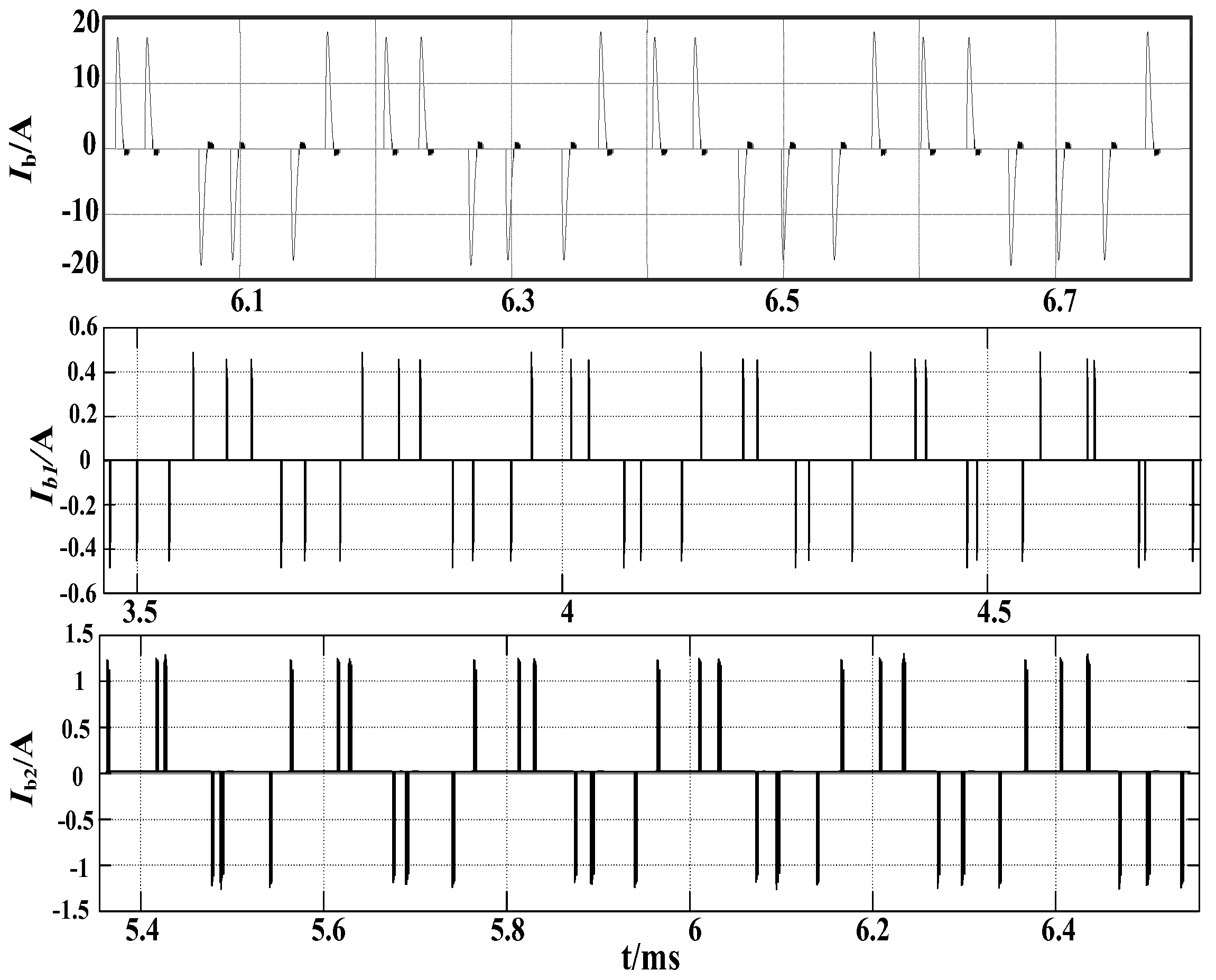
Cb1 and
Cb2 in
Figure 7 denote the equivalent capacitance of the drive end and non-driven end bearing, respectively.
Supposing the generator stator frame is well grounded, the high-frequency Vcom acts on the generator rotor winding. Coupled with stray capacitances, inductive voltage Vb would appear between the rotor and frame. Vb acts simultaneously between the inner and outer bearing raceways. When the electric filed intensity of the oil surpasses the breakdown intensity, it will lead to the oil film breaking down and produce a discharge current.
The bearing voltage ratio (BVR) can be defined as the ratio of the bearing voltage
Vb to the rotor winding common-mode voltage
Vcom, which is an indicator of bearing damage. The BVR of the DFIG is shown in Equation (9):
The bearing capacitance is much smaller than capacitances
Crwr and
Crf, and it usually changes with the temperature, speed, and load. If the influence of
Cb on the BVR is small, then
Cb1 and
Cb2 can be treated as
Cb1 =
Cb2 = 0. Using the capacitance in
Table 2, the bearing voltage ratio of this DFIG is 97.9%, which is much greater than the BVR of induction motors supplied by a PWM inverter, which is usually less than 10% [
6]. The significant difference of the BVR between the two kinds of machines is because the common mode voltage comes from different sides of the electrical machine. In the DFIG, the rotor winding is connected to the converter, and in induction motors powered by an inverter, the stator winding is connected to the inverter. In the latter condition coupling is on the capacitance of the stator winding to the rotor, which is very small because the two parts are separated by an airgap. Such a high BVR of the DFIG indicates that the bearing voltage of the DFIG is dangerous and harmful to the bearings.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}