Torque Distribution Algorithm for an Independently Driven Electric Vehicle Using a Fuzzy Control Method: Driving Stability and Efficiency


Abstract
:1. Introduction
2. Vehicle Stability Control
2.1. Slip Control
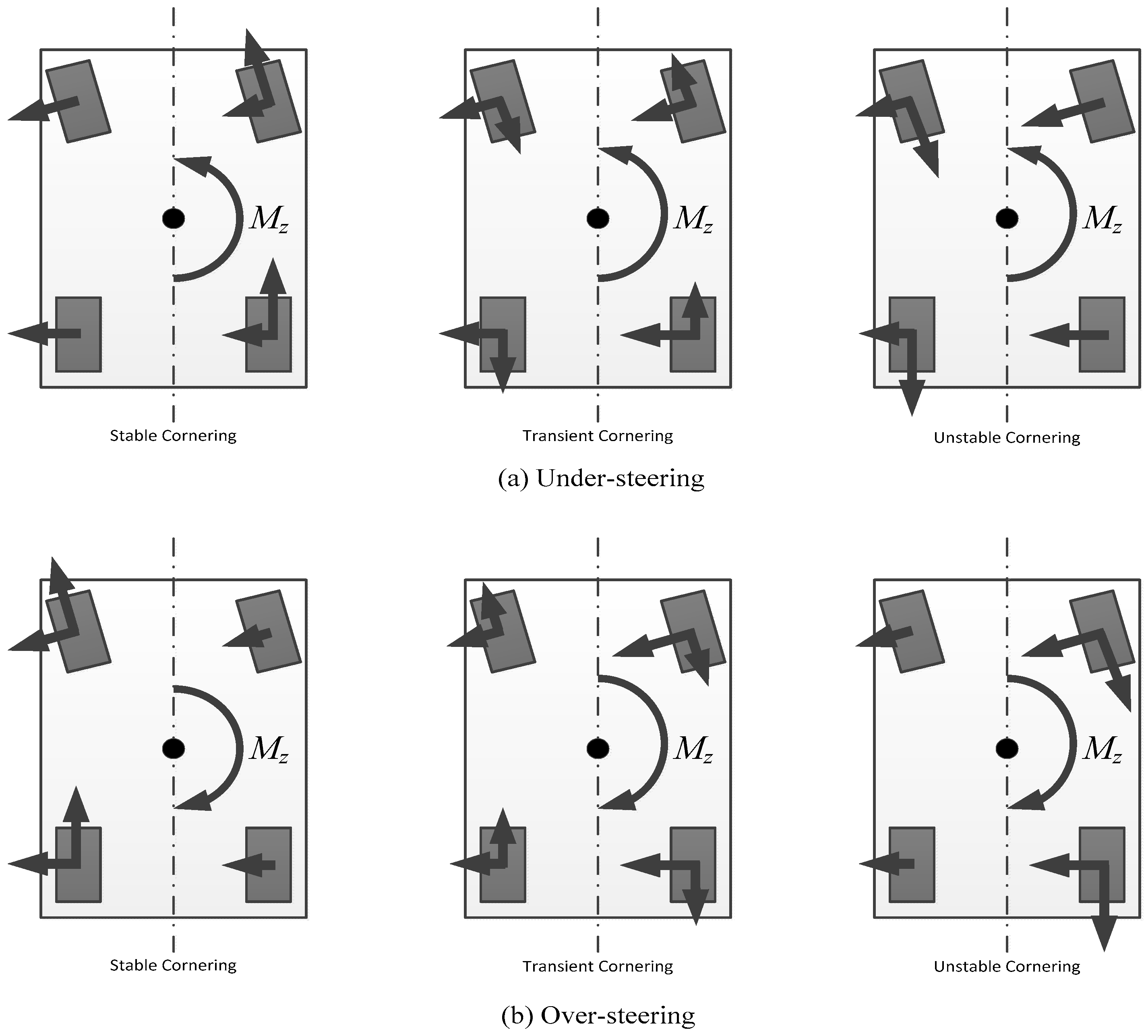
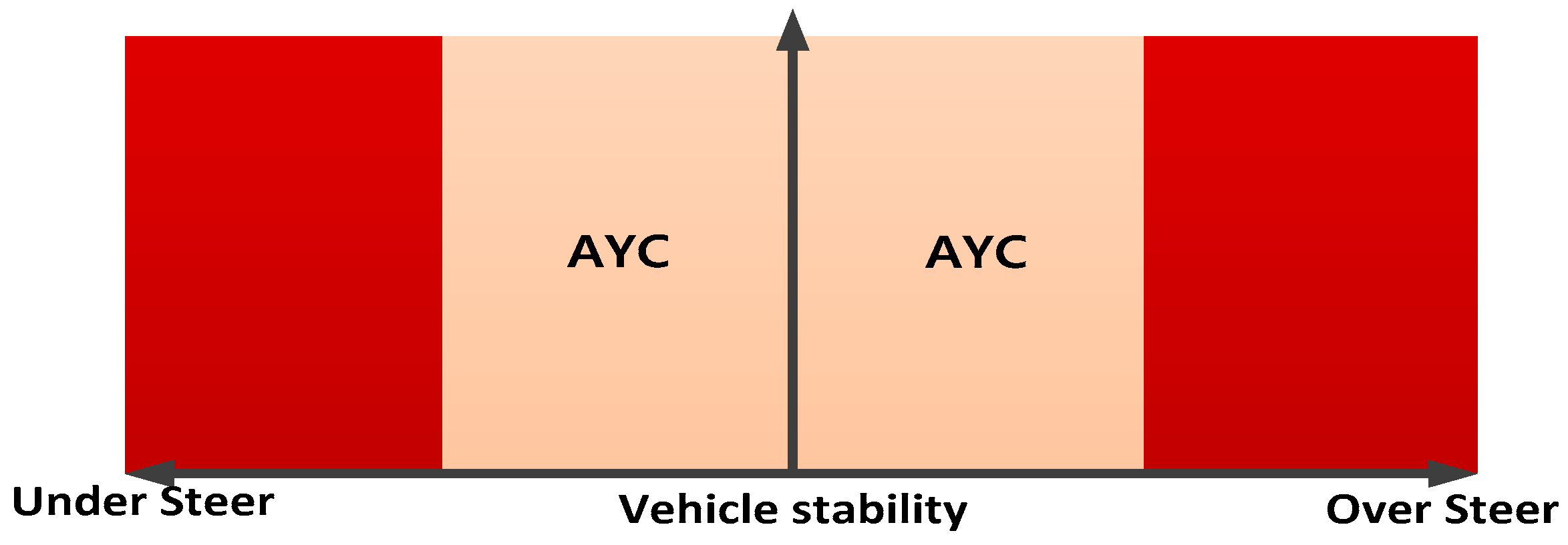
2.2. Active Yawrate Control Considering Driving Efficiency
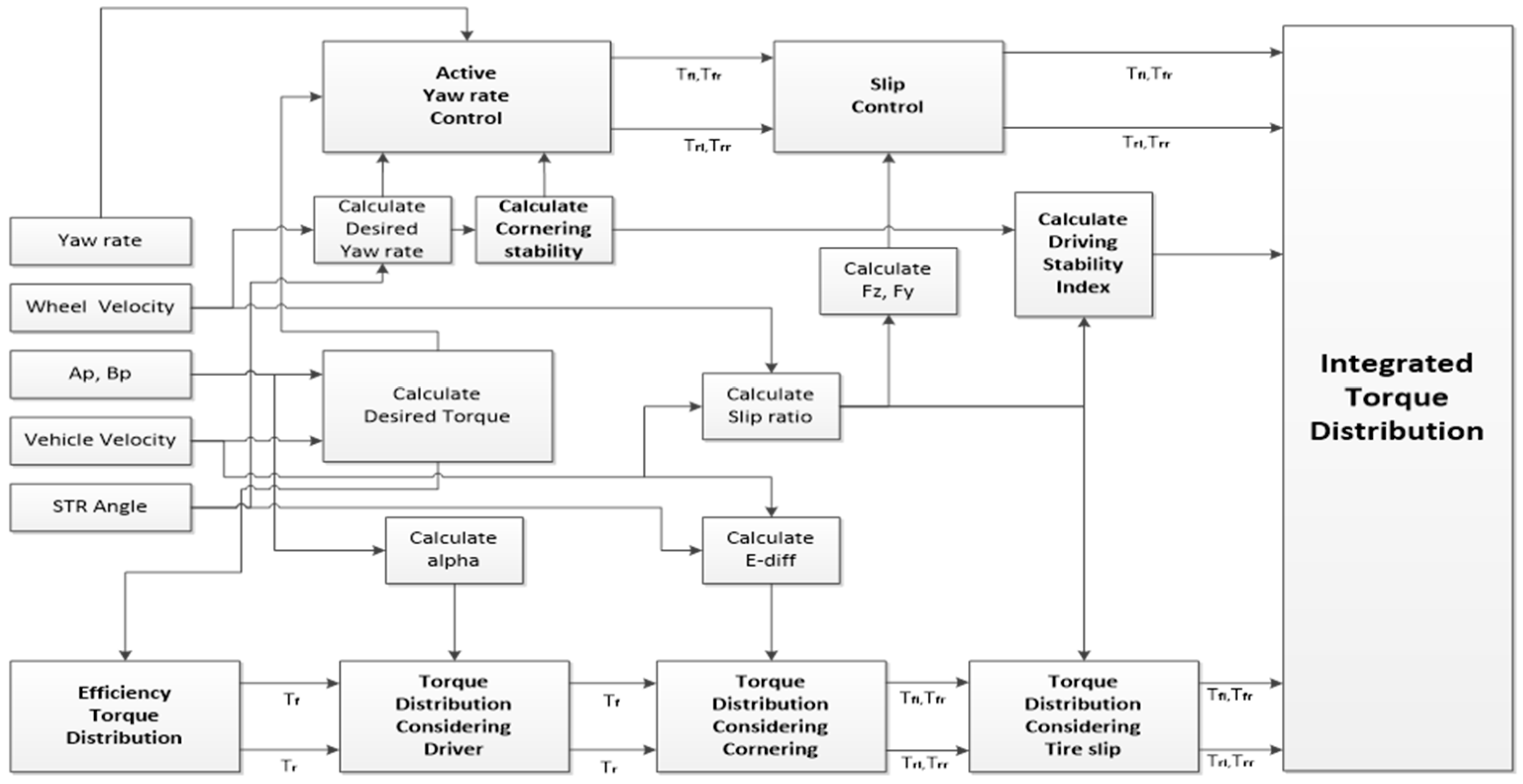
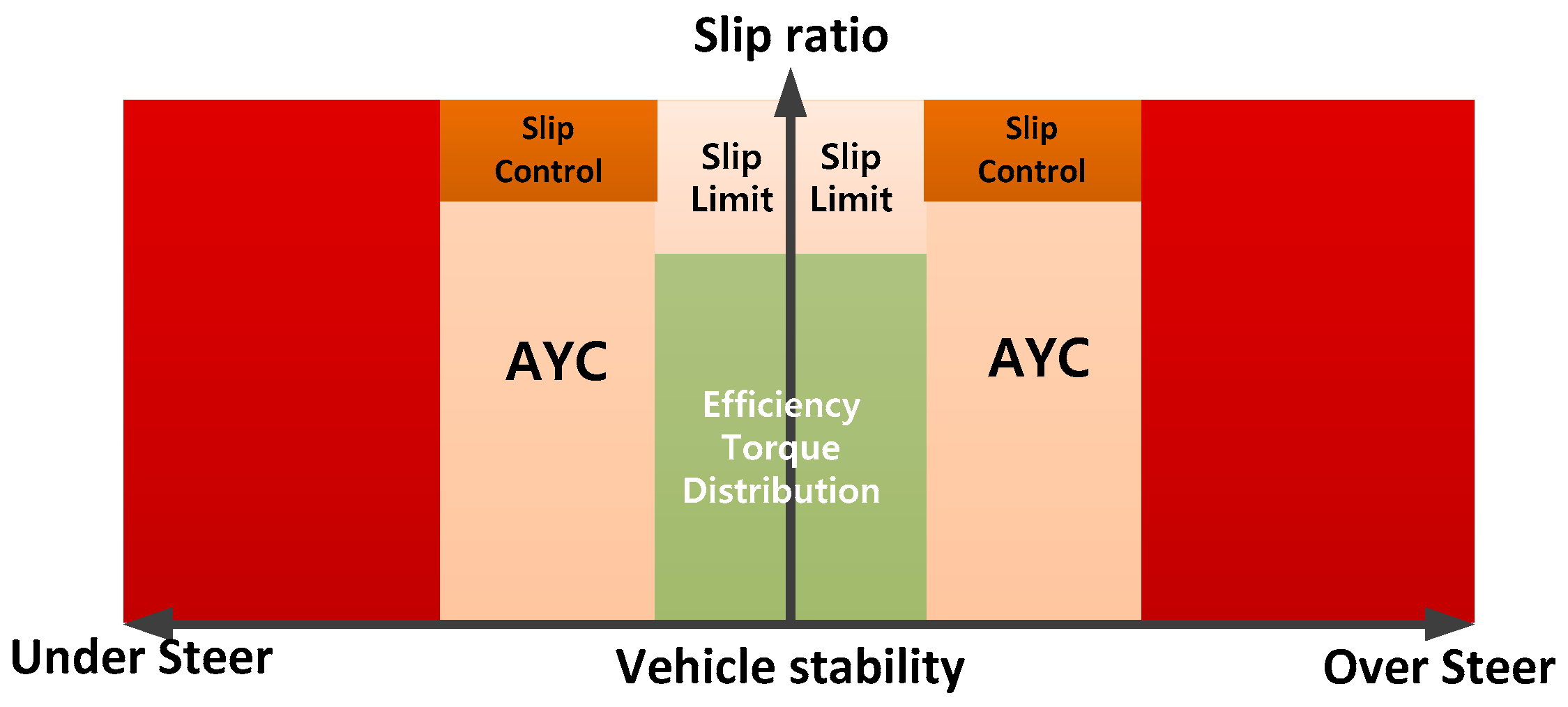
2.3. Integrated Driving Torque Distribution Strategy Considering Driving Efficiency and Stability
3. Simulation and Experimental Results
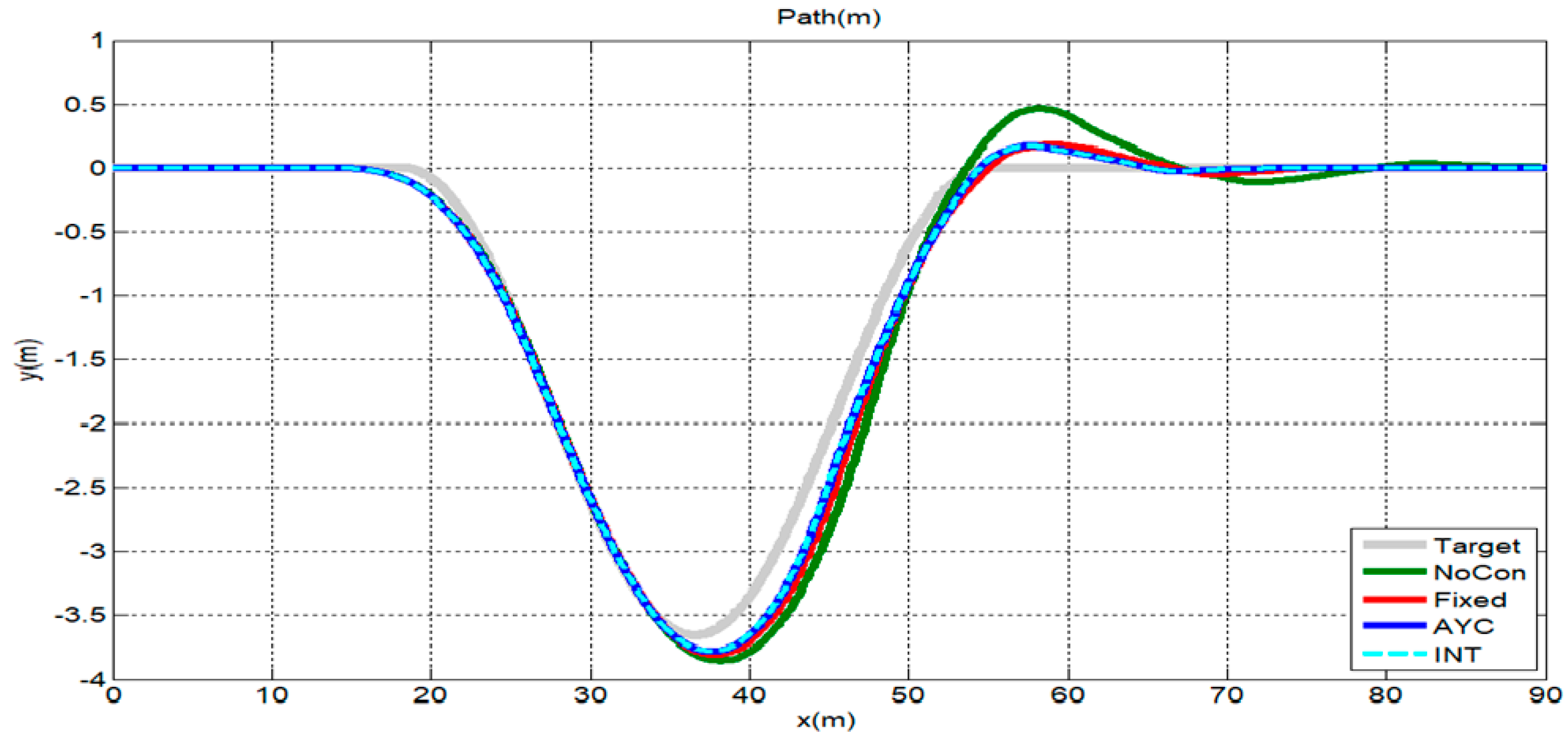
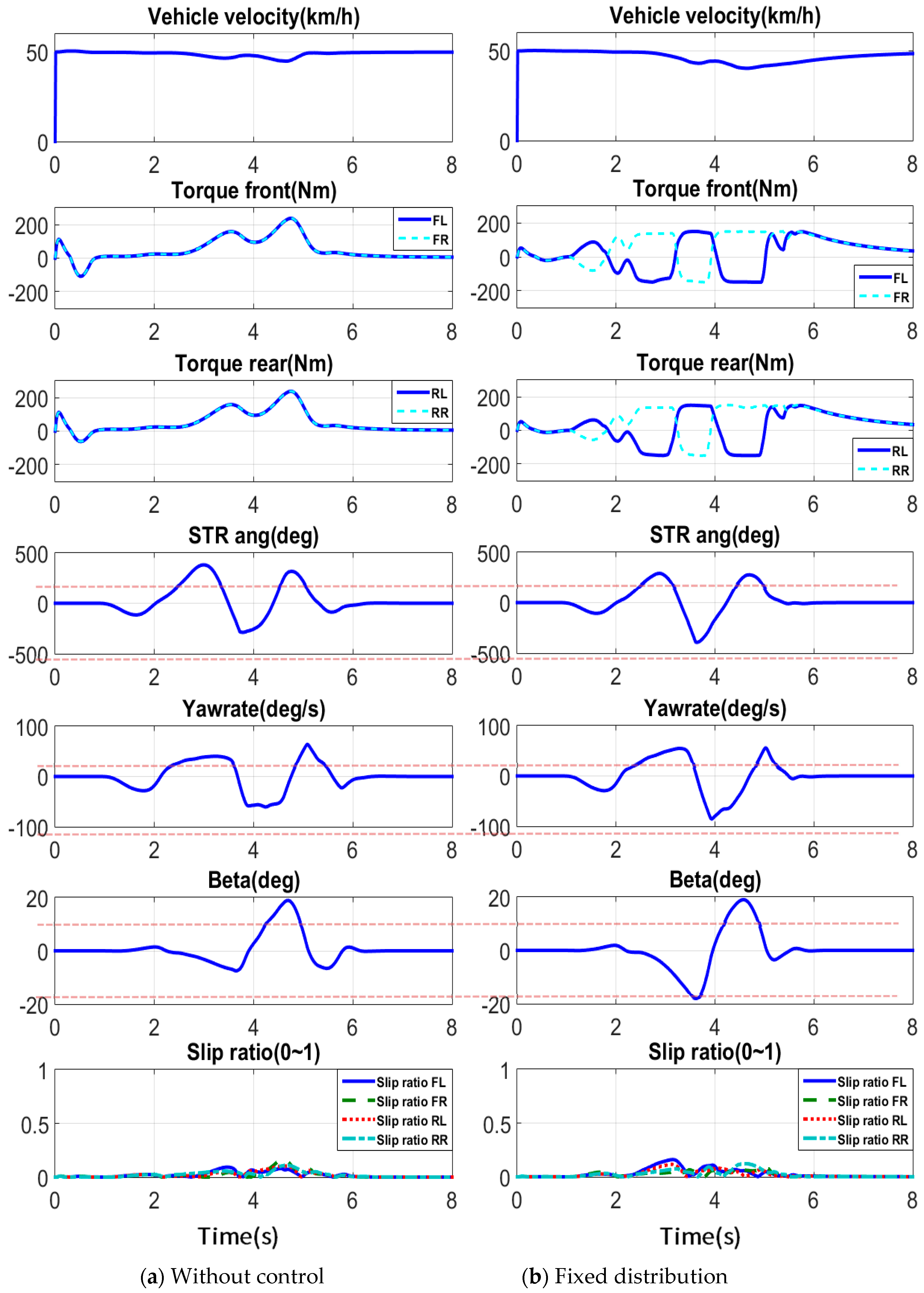
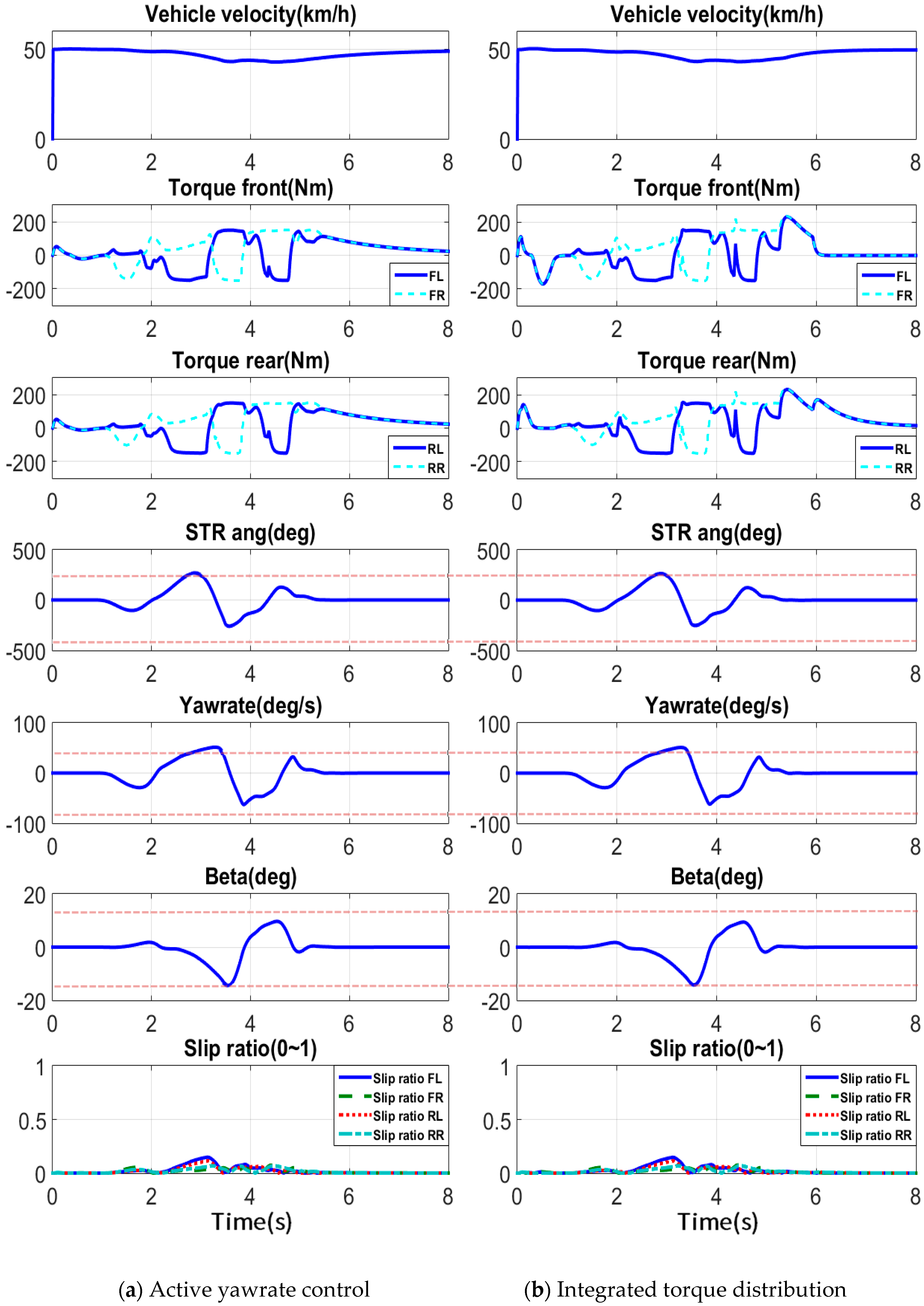
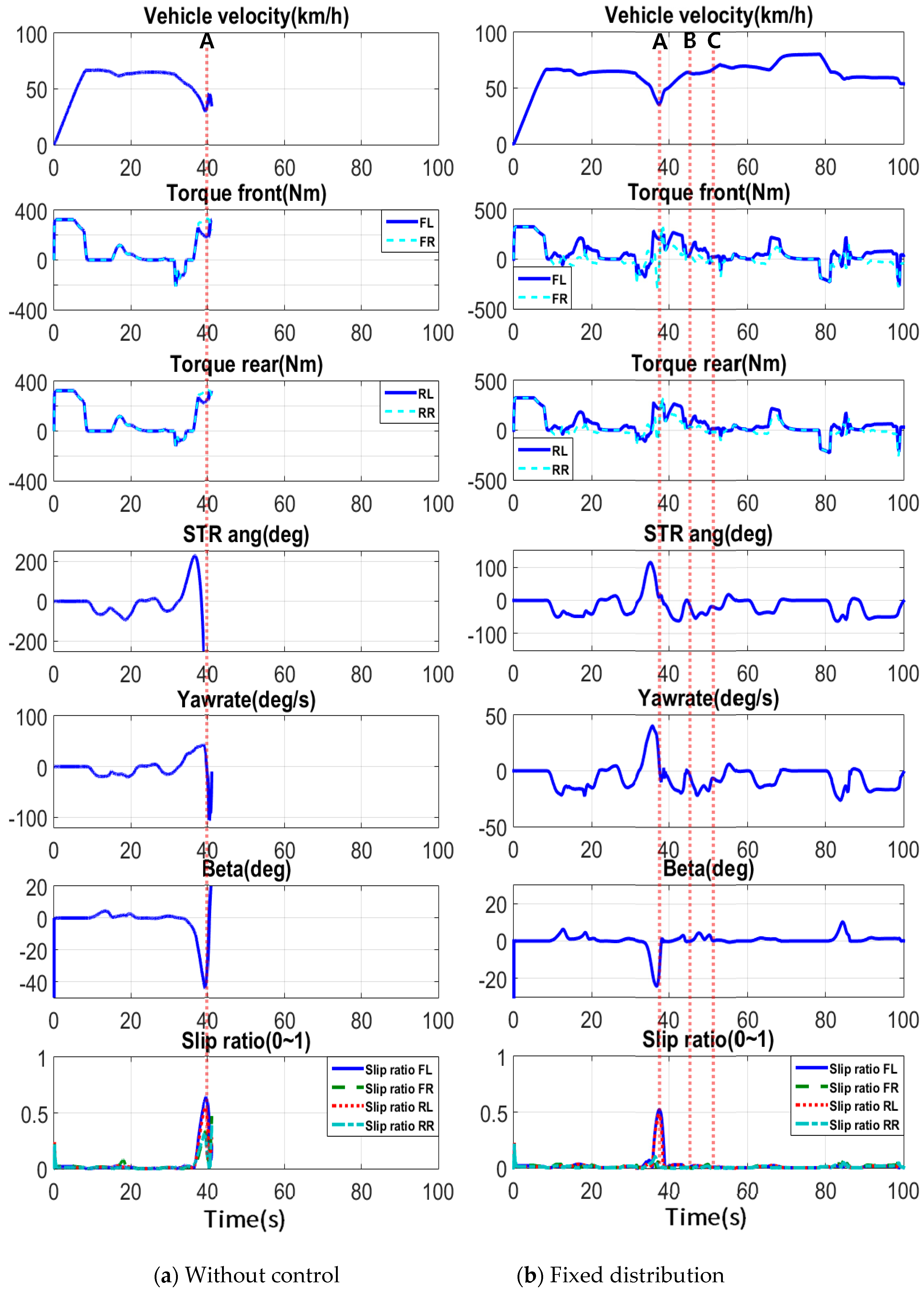
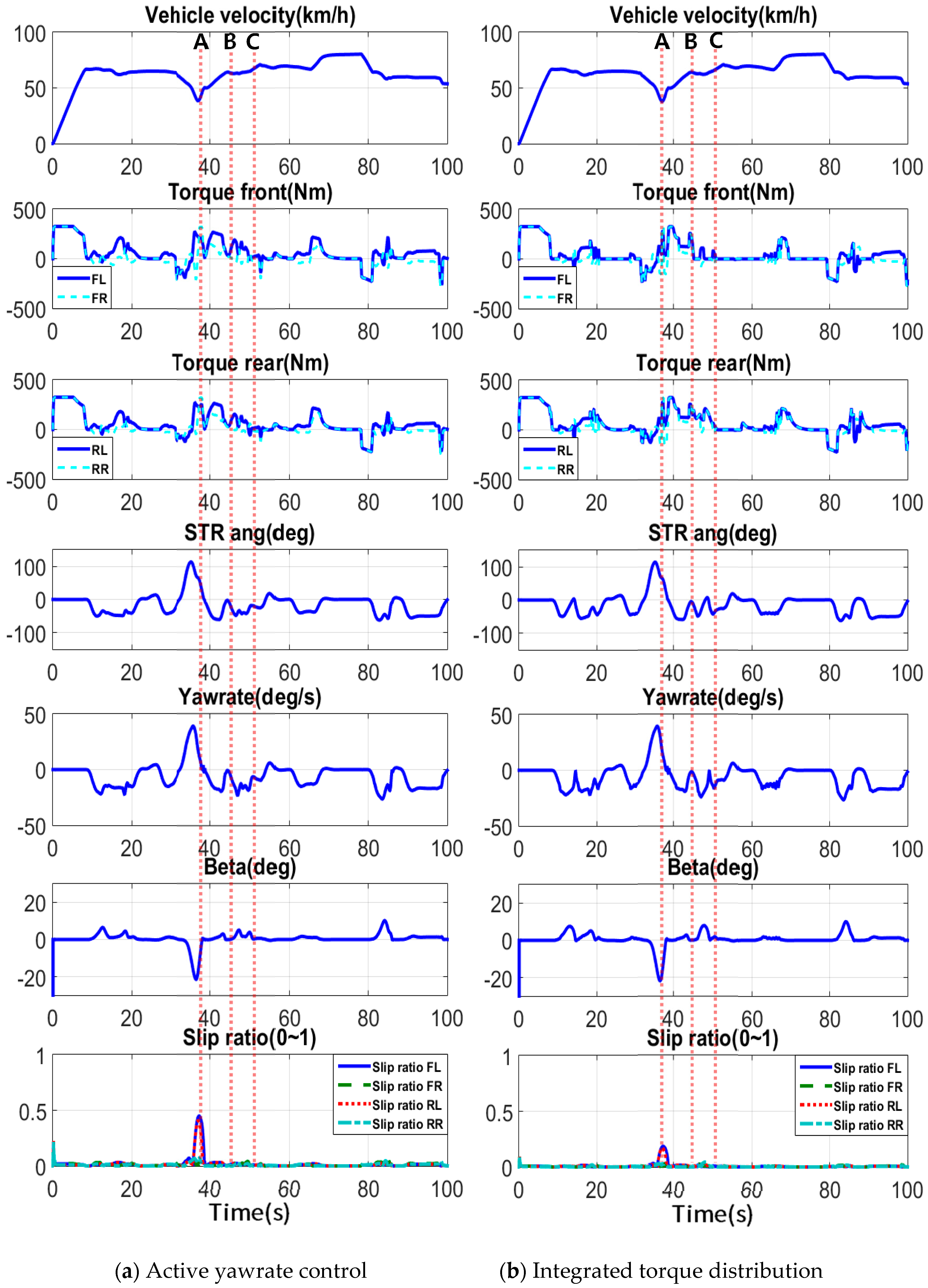
3.1. Double Lane Change Simulation
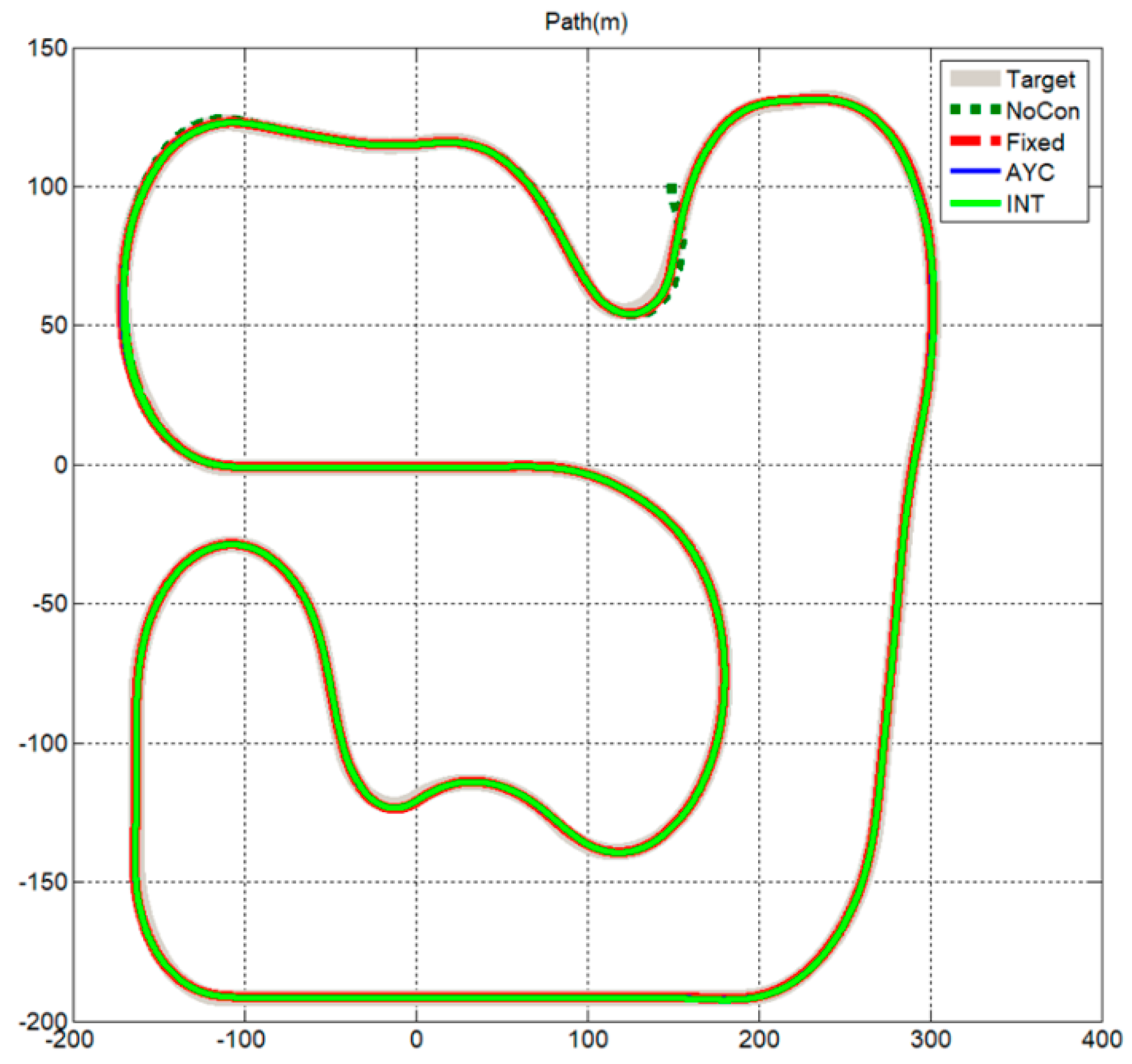
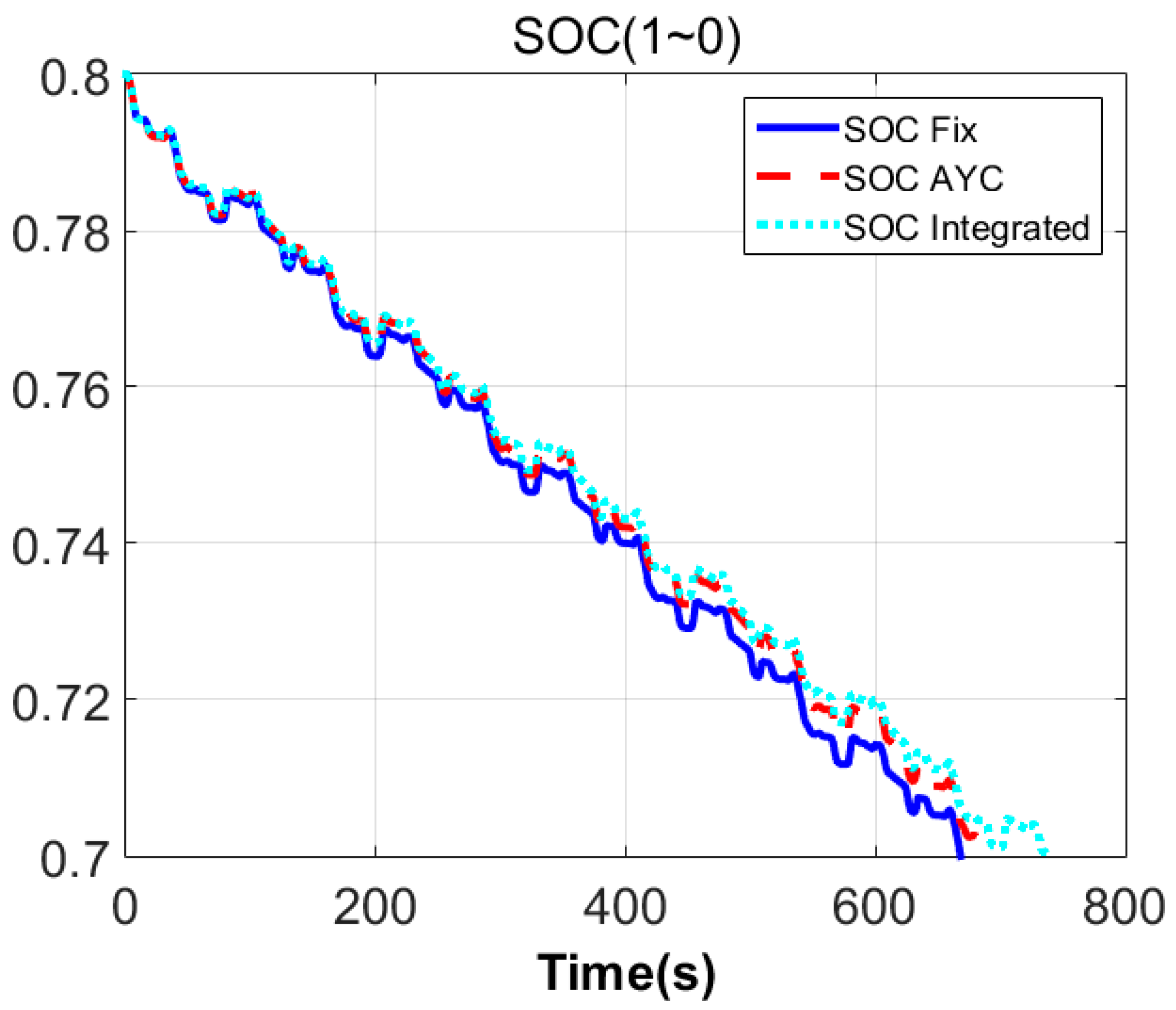
3.2. Complex Driving Road Simulation
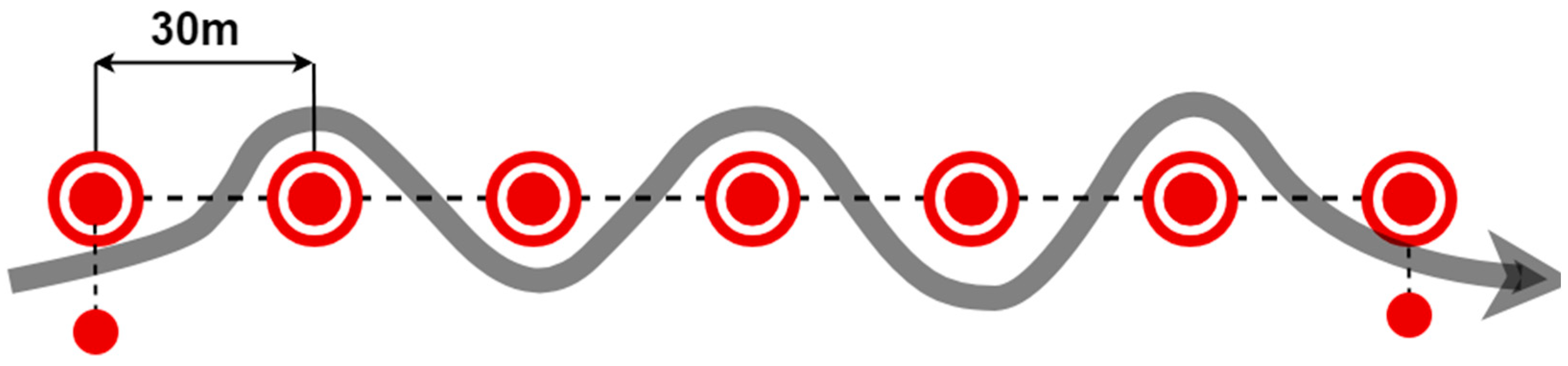
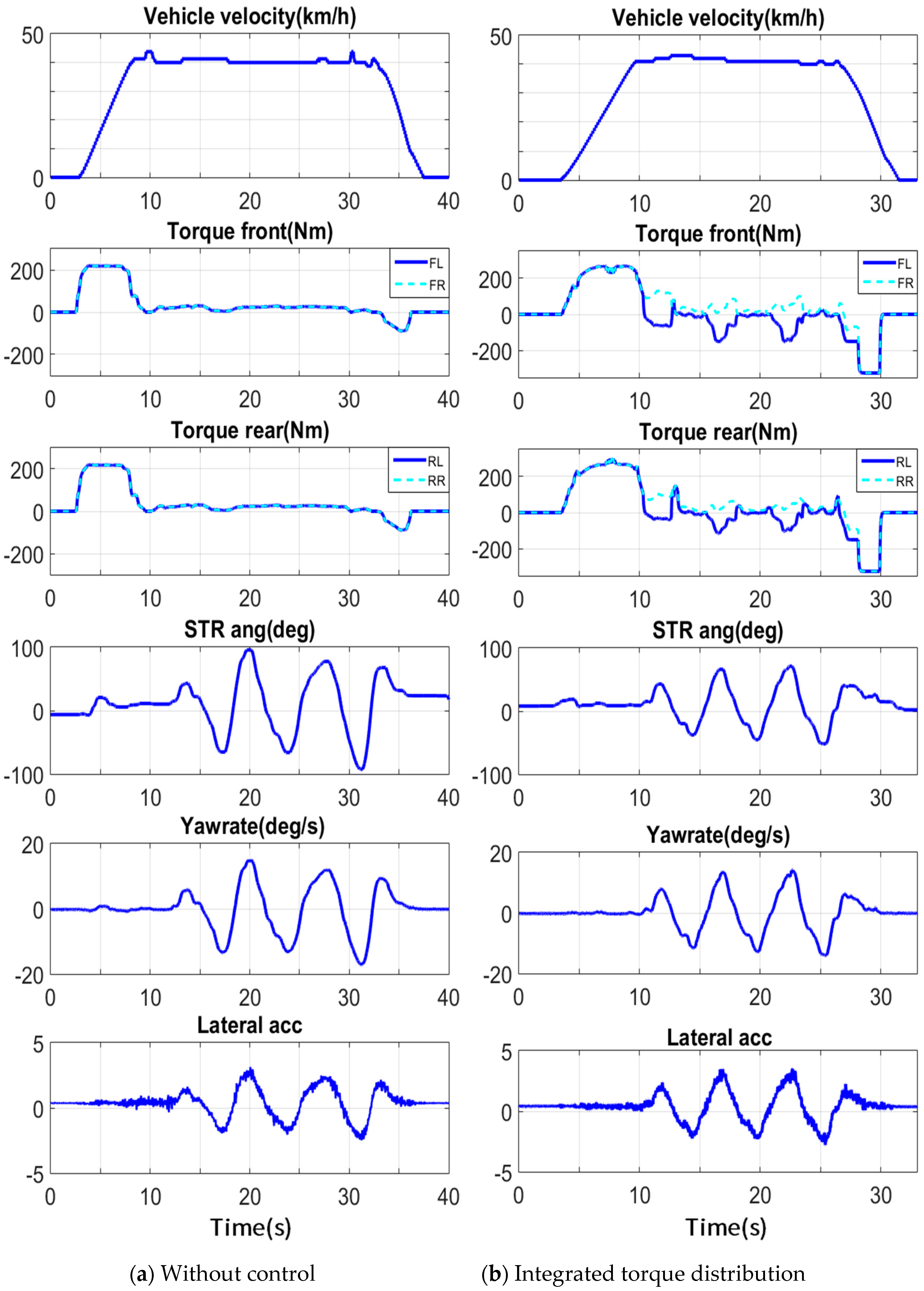
3.3. Vehicle Test
- -
- Test condition: Slalom course with pylon set at equal intervals of 30 m
- -
- Driving method: Drive as close as possible without hitting the pylon
- -
- Target Speed: 40 km/h
- -
- Measurement data: vehicle velocity, wheel steering angle, motor drive torque, yaw rate, and lateral acceleration
- -
- Measuring sensor: RT 3000
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Specification |
|---|---|
| Sprung mass | 1231 kg |
| Unprung mass | 161 kg |
| Vehicle height | 1440 mm |
| Vehicle width | 1600 mm |
| Wheel base | 2567 mm |
| Tire radius | 278 mm |
| Distance of CG to front wheel centerline | 1312 mm |
| Roll inertia | 506 kg·m2 |
| Pitch inertia | 2012 kg·m2 |
| Yaw inertia | 2065 kg·m2 |
| In-wheel motor | 15 kW |
| In-wheel motor gear ratio | 6 |
| Battery | 65 kW/50 Ah, Li-ion |
| SOC range | 0.3~0.8 |
References
- Hori, Y. Future Vehicle Driven by Electricity and Control-Research on Four-Wheel- Motored “UOT electric march II”. IEEE Trans. Ind. Electron. 2004, 51, 954–962. [Google Scholar] [CrossRef]
- Nasri, A.; Hazzab, A.; Bousserhane, I.; Hadjeri, S.; Sicard, P. Fuzzy-Sliding Mode Speed Control for Two Wheels Electric Vehicle Drive. J. Electr. Eng. Technol. 2009, 4, 499–509. [Google Scholar] [CrossRef]
- Sekour, M.; Hartani, K.; Draou, A.; Allali, A. Sensorless Fuzzy Direct Torque Control for High Performance Electric Vehicle with Four In-Wheel Motors. J. Electr. Eng. Technol. 2013, 8, 530–543. [Google Scholar] [CrossRef] [Green Version]
- Hartani, K.; Draou, A. A New Multimachine Robust Based Anti-skid Control System for High Performance Electric Vehicle. J. Electr. Eng. Technol. 2014, 9, 214–230. [Google Scholar] [CrossRef] [Green Version]
- Cirovic, V.; Aleksendric, D. Adaptive neuro-fuzzy wheel slip control. Expert Syst. Appl. 2013, 40, 5197–5209. [Google Scholar] [CrossRef]
- Kim, J.; Park, C.; Hwang, S.; Hori, Y.; Kim, H. Control Algorithm for an Independent Motor-Drive Vehicle. IEEE Trans. Veh. Technol. 2010, 59, 3213–3222. [Google Scholar] [CrossRef]
- Peng, X.; Zhe, H.; Guifang, G.; Gang, X.; Binggang, C.; Zengliang, L. Driving and control of torque for direct-wheel-driven electric vehicle with motors in serial. Expert Syst. Appl. 2011, 38, 80–86. [Google Scholar] [CrossRef]
- Wang, J.; Wang, Q.; Jin, L.; Song, C. Independent wheel torque control of 4WD electric vehicle for differential drive assisted steering. Mechatronics 2011, 21, 63–76. [Google Scholar] [CrossRef]
- Lee, J.; Suh, S.; Whon, W.; Kim, C.; Han, C. System Modeling and Simulation for an In-wheel Drive Type 6 × 6 Vehicle. Trans. KSAE 2011, 19, 1–11. [Google Scholar]
- Fujimoto, H.; Saito, T.; Tsumasaka, A.; Noguchi, T. Motion Control and Road Condition Estimation of Electric Vehicles with Two In-wheel Motors. In Proceedings of the 2004 IEEE International Conference on Control Applications, Taipei, Taiwan, 2–4 September 2004; pp. 1266–1271. [Google Scholar]
- Park, J.; Choi, J.; Song, H.; Hwang, S. Study of Driving Stability Performance of 2-Wheeled Independently Driven Vehicle Using Electric Corner Module. Trans. Korean Soc. Mech. Eng. A 2013, 37, 937–943. [Google Scholar] [CrossRef] [Green Version]
- Gu, J.; Ouyang, M.; Lu, D.; Li, J.; Lu, L. Energy Efficiency Optimization of Electric Vehicle Driven by in-Wheel Motors. Int. J. Automot. Technol. 2013, 14, 763–772. [Google Scholar] [CrossRef]
- Lin, C.; Cheng, X. A Traction Control Strategy with an Efficiency Model in a Distributed Driving Electric Vehicle. Sci. World J. 2014, 261085. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, J. Adaptive Energy-Efficient Control Allocation for Planar Motion Control of Over-Actuated Electric Ground Vehicles. IEEE Trans. Control Syst. Technol. 2014, 22, 1362–1373. [Google Scholar]
- Chen, Y.; Wang, J. Design and Experimental Evaluations on Energy Efficient Control Allocation Methods for Overactuated Electric Vehicles: Longitudinal Motion Case. IEEE-ASME Trans. Mechatron. 2014, 19, 538–548. [Google Scholar] [CrossRef]
- Xu, G.; Li, W.; Xu, K.; Song, Z. An Intelligent Regenerative Braking Strategy for Electric Vehicles. Energies 2011, 4, 1461–1477. [Google Scholar] [CrossRef] [Green Version]
- Singh, K.; Taheri, S. Estimation of Tire–road Friction Coefficient and its Application in Chassis Control Systems. Syst. Sci. Control Eng. 2015, 3, 39–61. [Google Scholar] [CrossRef]
- Bera, T.; Samantaray, A. Mechatronic Vehicle Braking Systems. Mechatron. Innov. Appl. 2012, 3–36. [Google Scholar] [CrossRef]
- Ko, S. A Study on Estimation of Core Parameters and Integrated Co-operative Control Algorithm for an In-wheel Electric Vehicle. Ph.D. Thesis, Sungkyunkwan University, Jongno-gu, Seoul, 2014. [Google Scholar]
- Oudghiri, M.; Chadli, M.; Hajjaji, A. Robust Fuzzy Sliding Mode Control for Antilock Braking System. Int. J. Sci. Tech. Autom. Control 2007, 1, 13–28. [Google Scholar]
- Bakker, E.; Pacejka, H.; Lidner, L. A New Tire Model with an Applicationin Vehicle Dynamics Studies. SAE Trans. J. Passeng. Cars 1989, 98, 101–113. [Google Scholar]
- Thomas, D.G. Fundamentals of Vehicle Dynamics; SAE: Warrendale, PA, USA, 2009. [Google Scholar]
- Zadeh, L. Fuzzy Sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Park, J.; Jeong, H.; Jang, I.; Hwang, S. Torque Distribution Algorithm for an Independently Driven Electric Vehicle using a Fuzzy Control Method. Energies 2015, 8, 8537–8561. [Google Scholar] [CrossRef]


















| Fuzzy Controller Input Membership Function | Fuzzy Controller Rule Base |
 |  |
| Fuzzy Controller Output Membership Function | Fuzzy Control Surface |
 |  |
| Performance Index | Fixed Distribution | Active Yawrate Control | Integrated Torque Distribution |
|---|---|---|---|
| Driving Distance | 11.89 km | 12.35 km | 13.19 km |
| Rate of Increment | - | 3.87% | 10.93% |
| Signal Name | 1st Peak Value | 2nd Peak Value | 3rd Peak Value | 4th Peak Value | 5th Peak Value | R.M.S Value |
|---|---|---|---|---|---|---|
| STR ang (deg) without ITD | −65.2 | 95.6 | −66 | 77.5 | −92.4 | 80.4 |
| STR ang (deg) with ITD | −37.7 | 66.1 | 71.1 | −45.2 | −51.7 | 55.8 |
| Yawrate (deg/s) without ITD | −13 | 15 | −12.99 | 11.88 | −17.04 | 14.11 |
| Yawrate (deg/s) with ITD | −11.44 | 13.43 | −12.73 | 14.16 | 13.97 | 13.2 |
| Lateral acc without ITD | −1.95 | 3.13 | −2.04 | 2.43 | −2.37 | 2.4 |
| Lateral acc with ITD | −2 | 3.49 | −2.32 | 3.51 | −2.31 | 2.8 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, J.; Jang, I.G.; Hwang, S.-H. Torque Distribution Algorithm for an Independently Driven Electric Vehicle Using a Fuzzy Control Method: Driving Stability and Efficiency. Energies 2018, 11, 3479. https://doi.org/10.3390/en11123479
Park J, Jang IG, Hwang S-H. Torque Distribution Algorithm for an Independently Driven Electric Vehicle Using a Fuzzy Control Method: Driving Stability and Efficiency. Energies. 2018; 11(12):3479. https://doi.org/10.3390/en11123479
Chicago/Turabian StylePark, Jinhyun, In Gyu Jang, and Sung-Ho Hwang. 2018. "Torque Distribution Algorithm for an Independently Driven Electric Vehicle Using a Fuzzy Control Method: Driving Stability and Efficiency" Energies 11, no. 12: 3479. https://doi.org/10.3390/en11123479