Development and Test Application of an Auxiliary Power-Integrated System


Abstract
:1. Introduction
2. APU System Design and Parameter Matching
2.1. Vehicle Demand Power
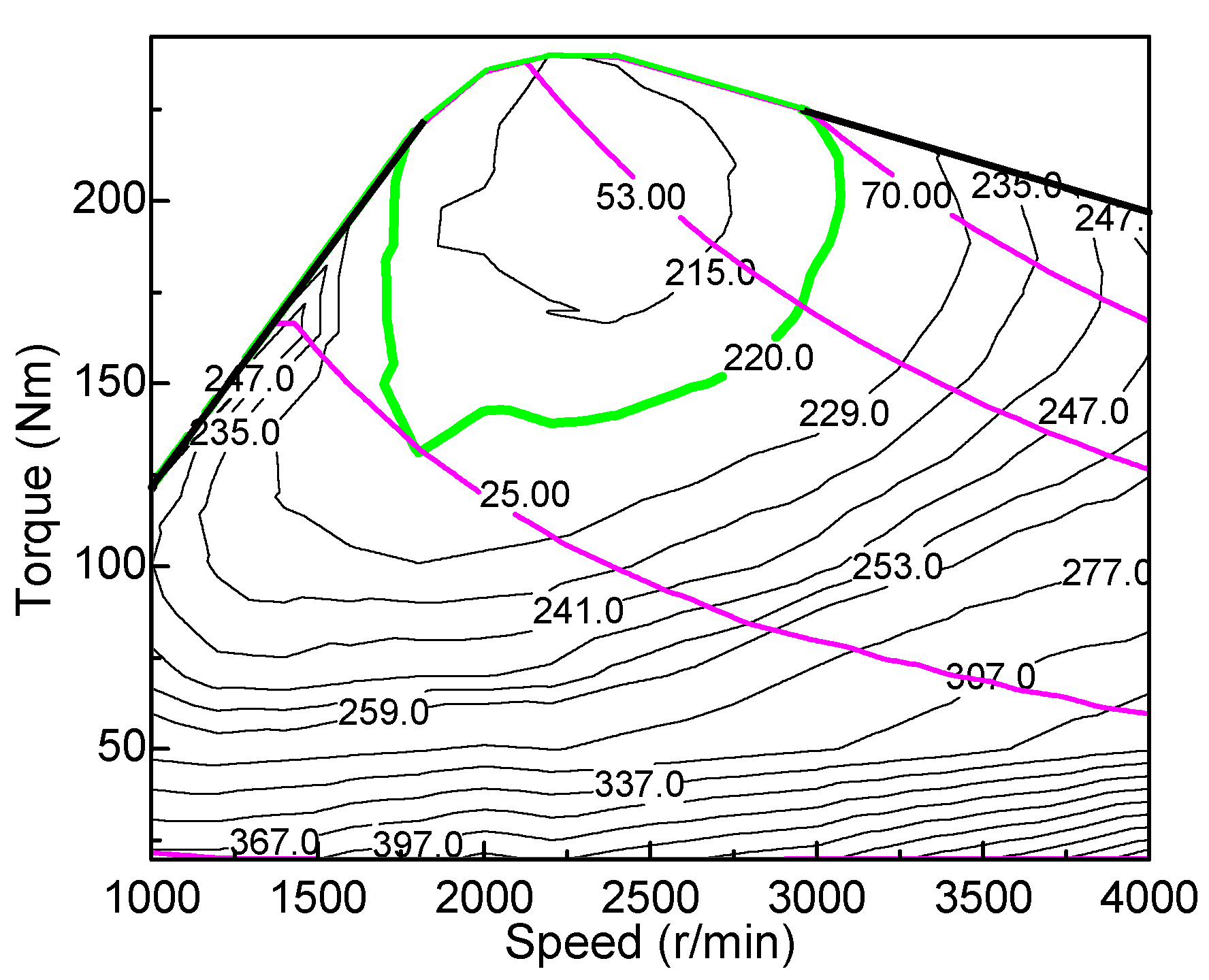
2.2. Engine Operating Characteristics
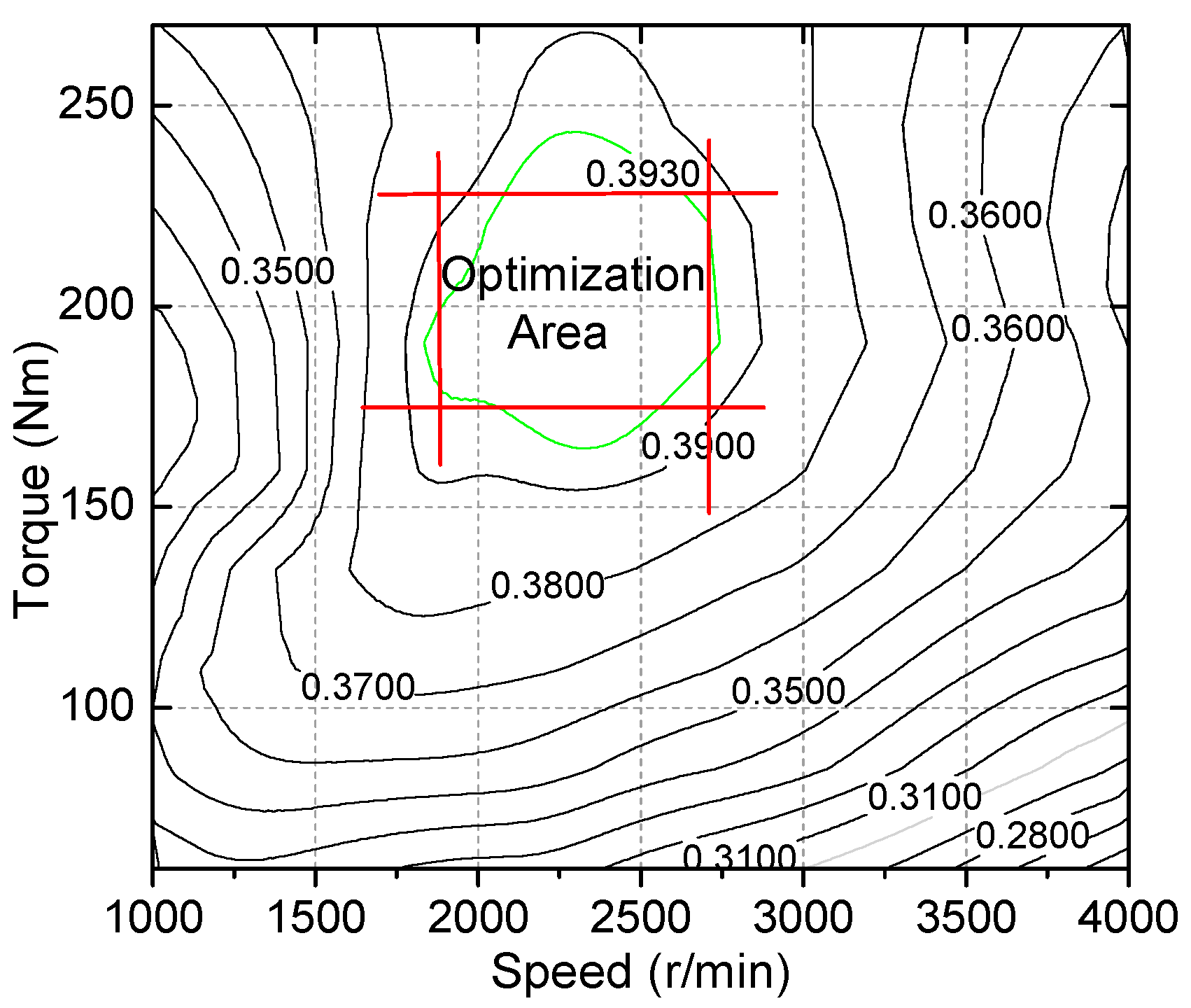
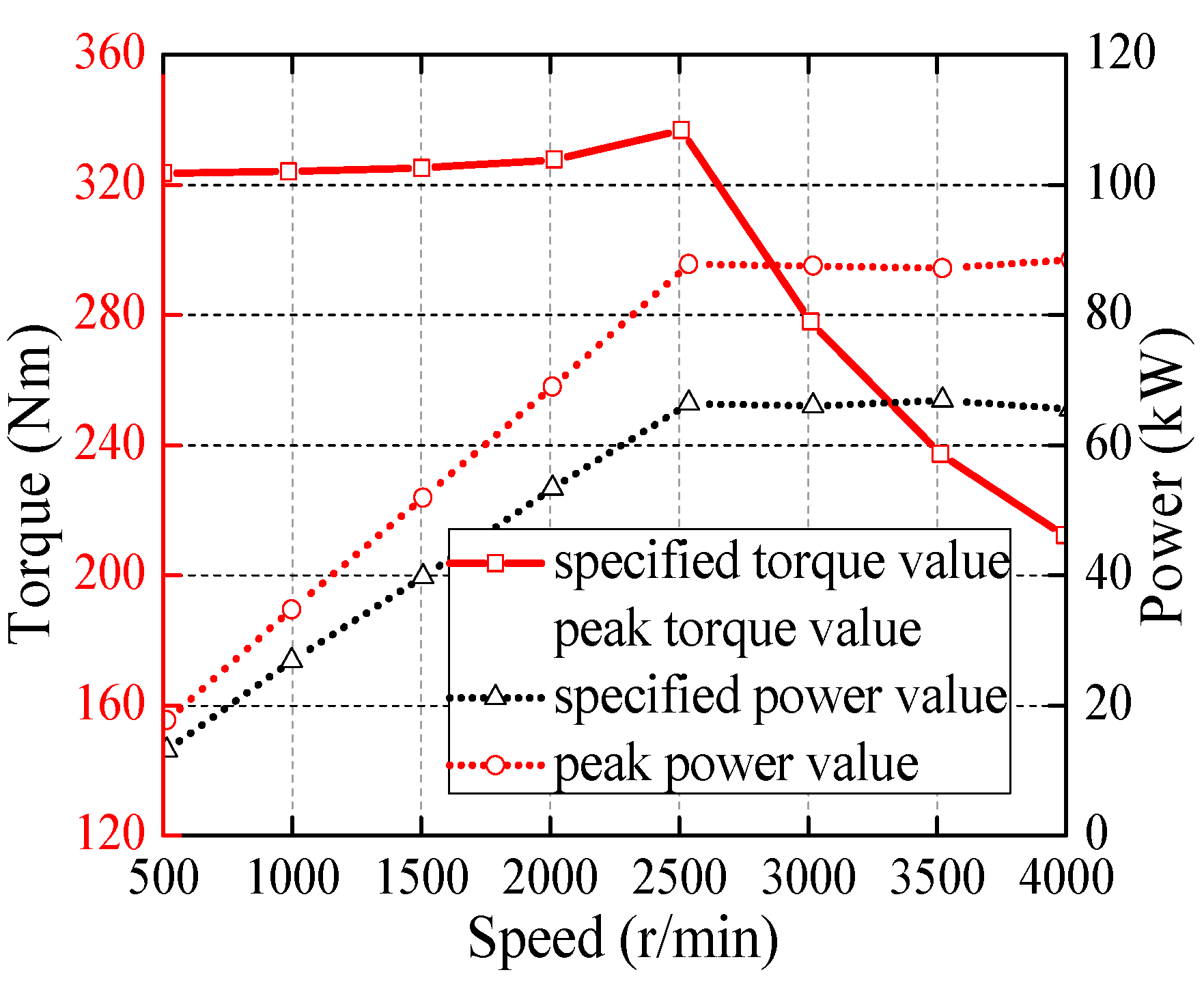
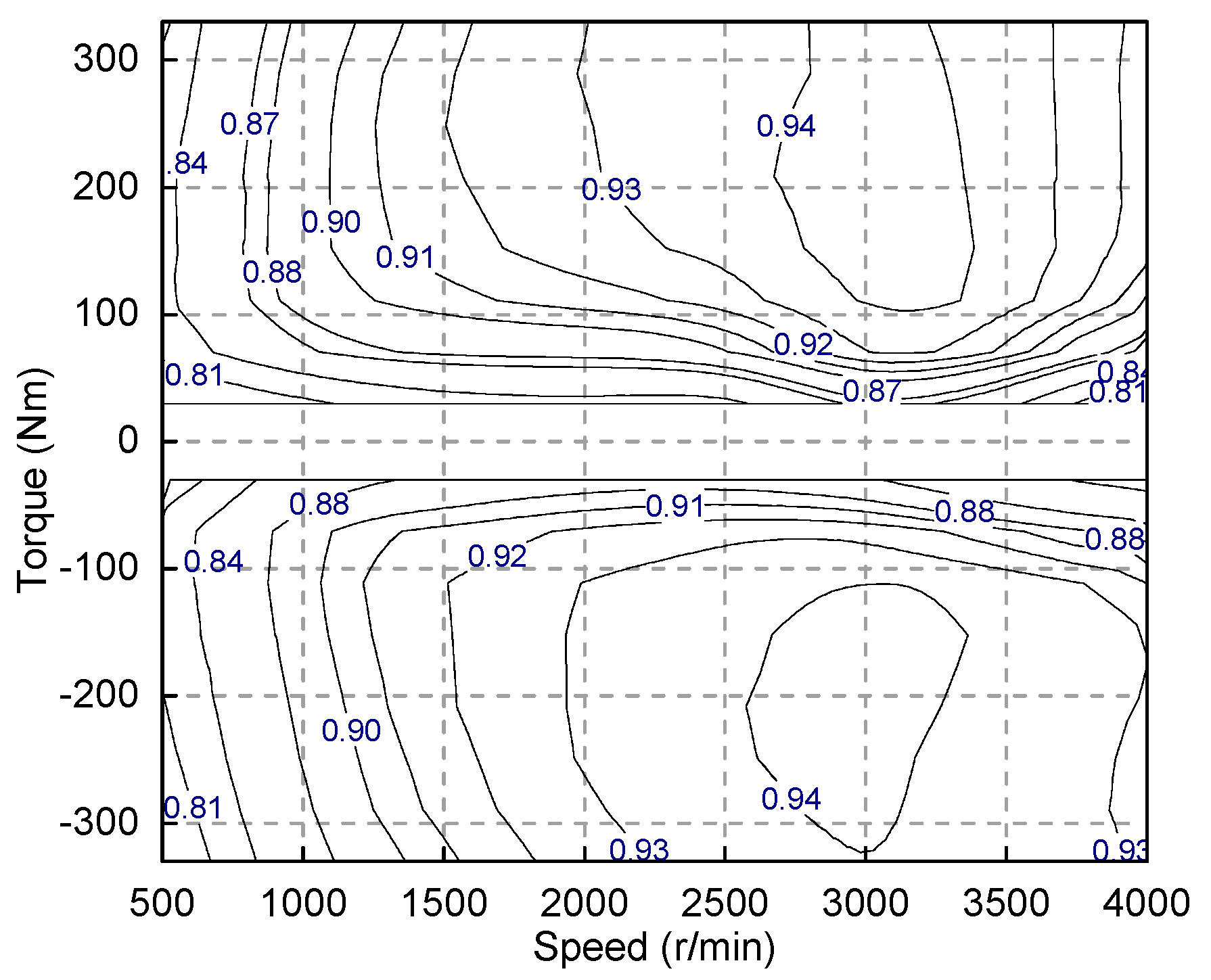
2.3. Generator Characteristics
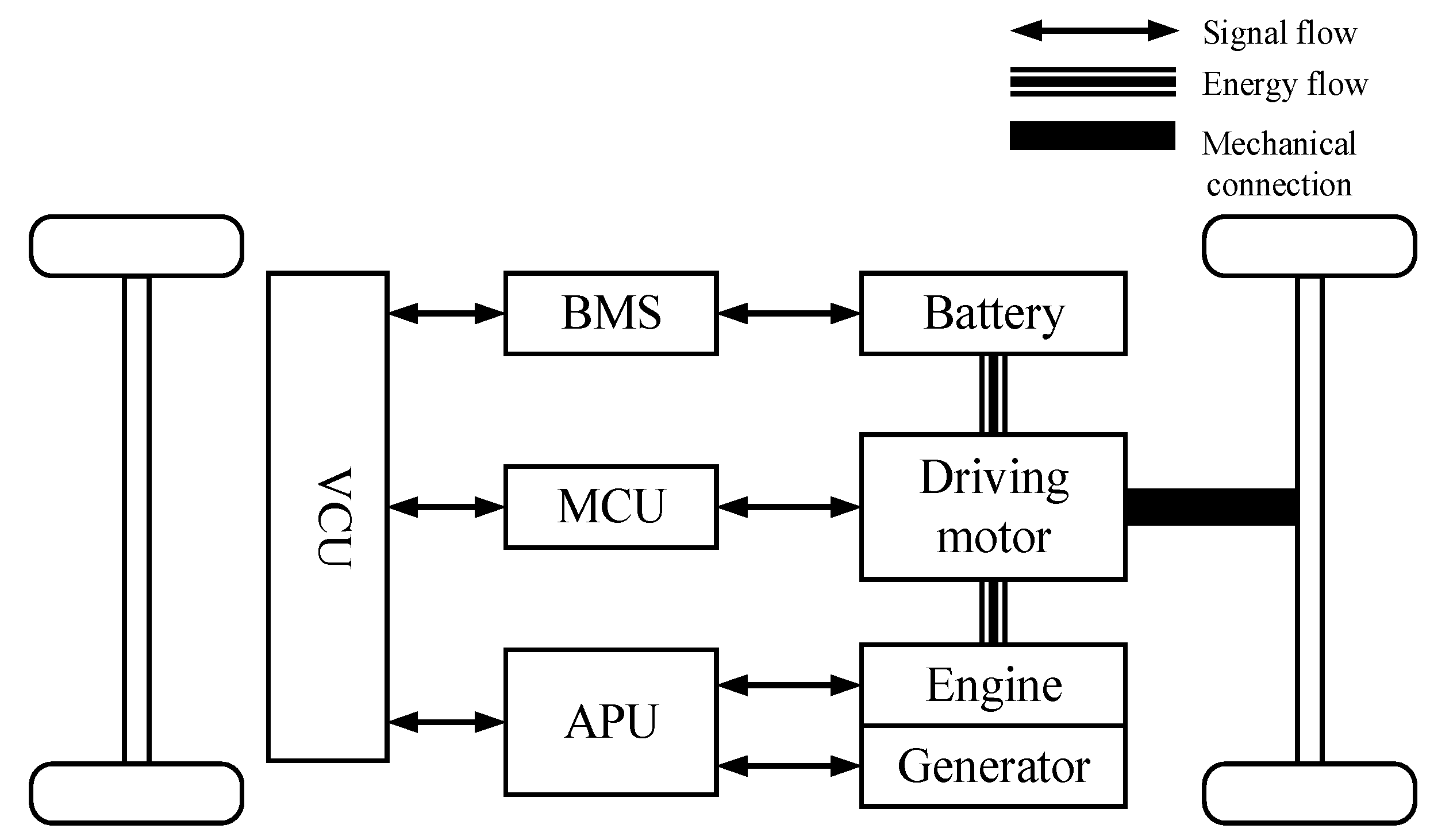
3. APU-Integrated Control System Design
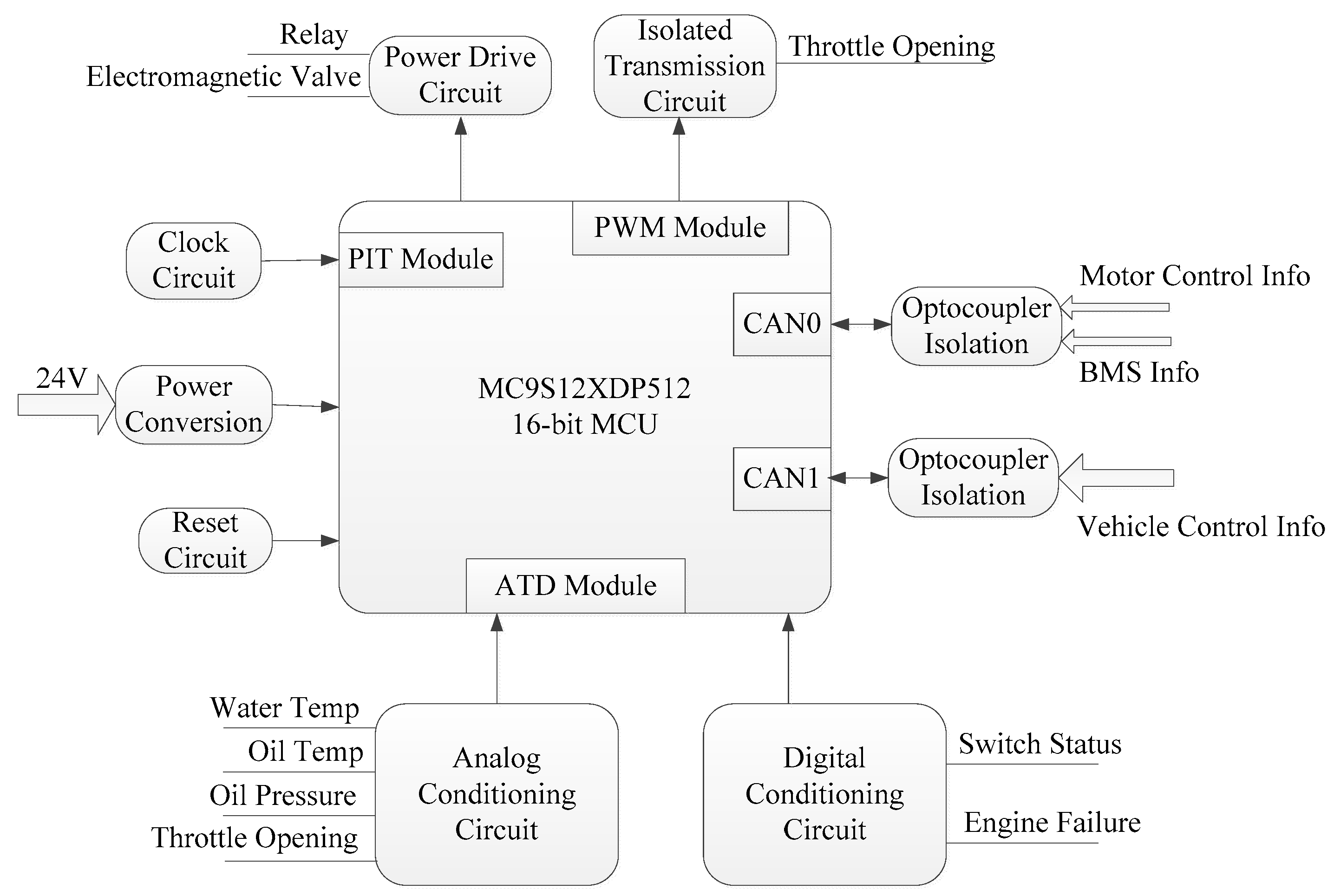
3.1. Hardware Design for the APU Controller
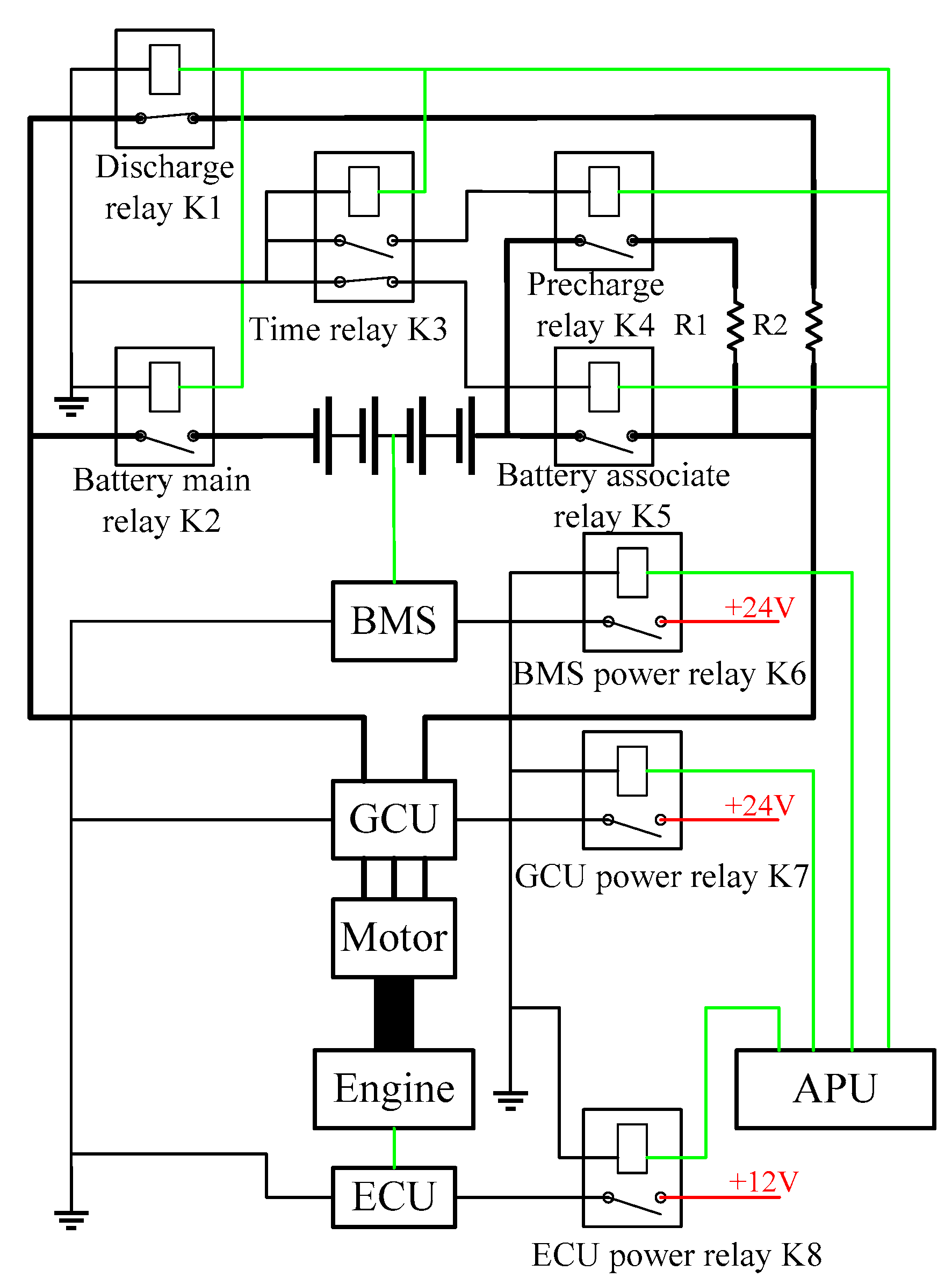
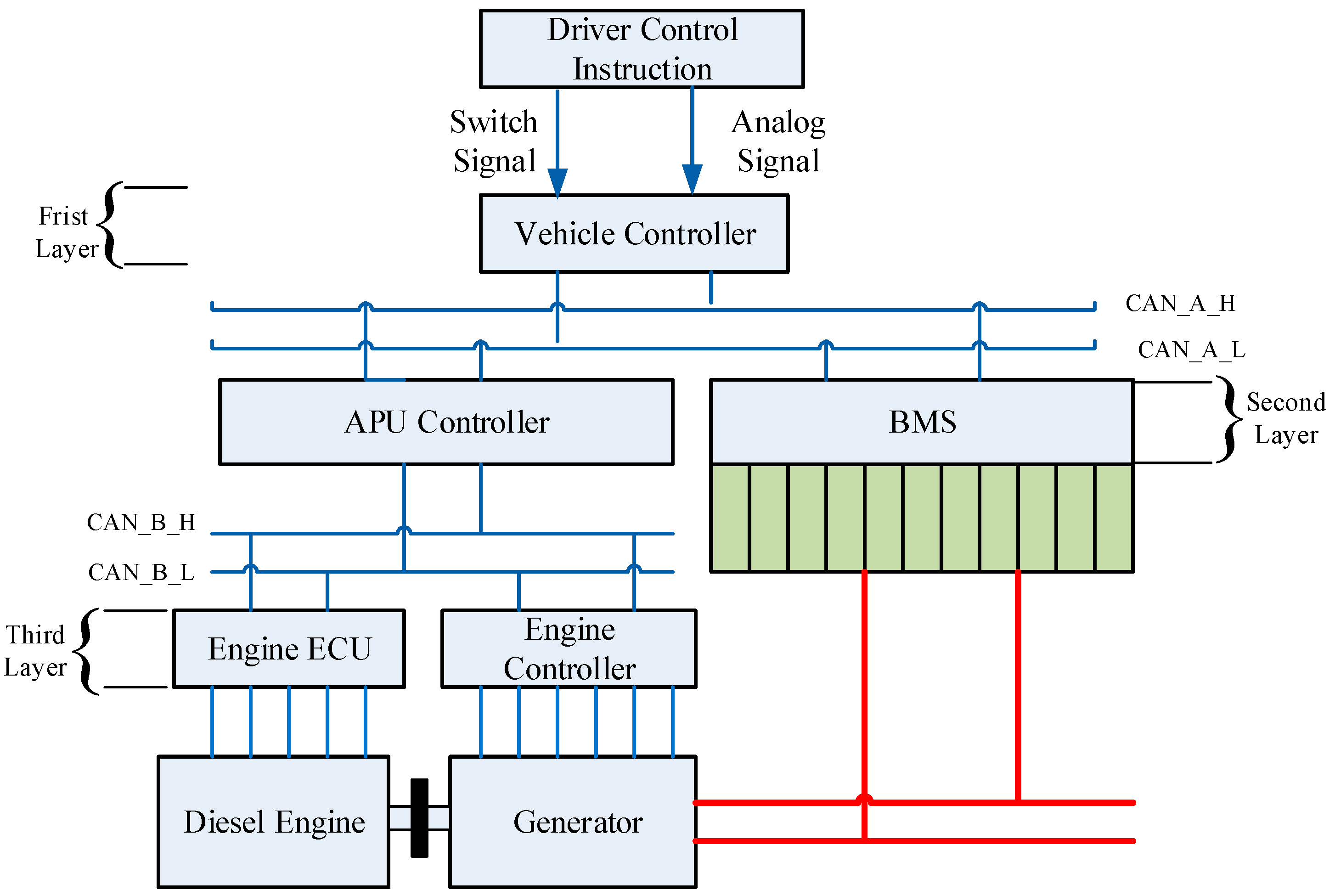
3.2. Circuit Design for the APU-Integrated Control System
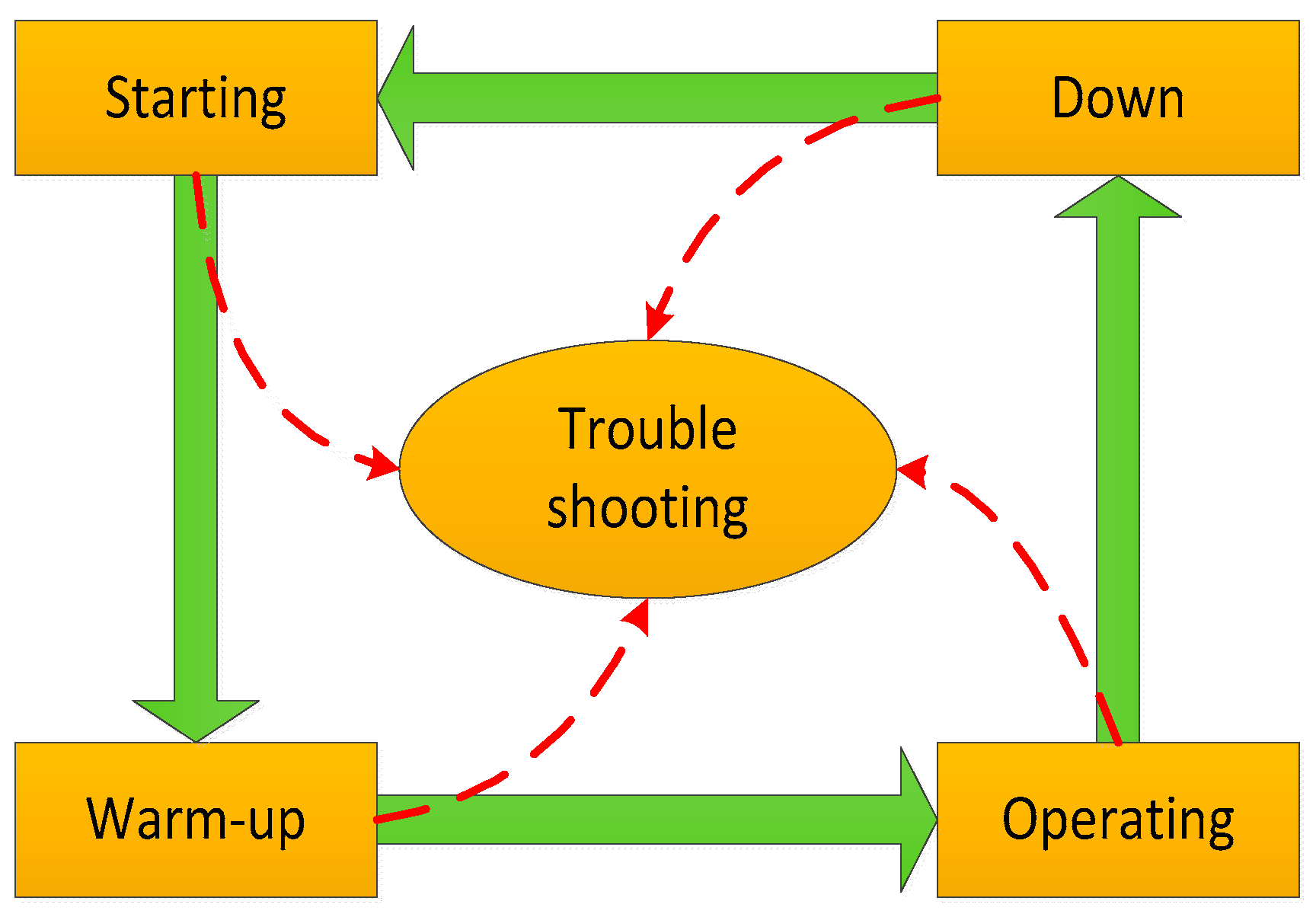
3.3. Software Design for the APU-Integrated Control System
3.4. The Communication Solution for the Integrated Control System
4. Strategy Design for the APU-Integrated Control System
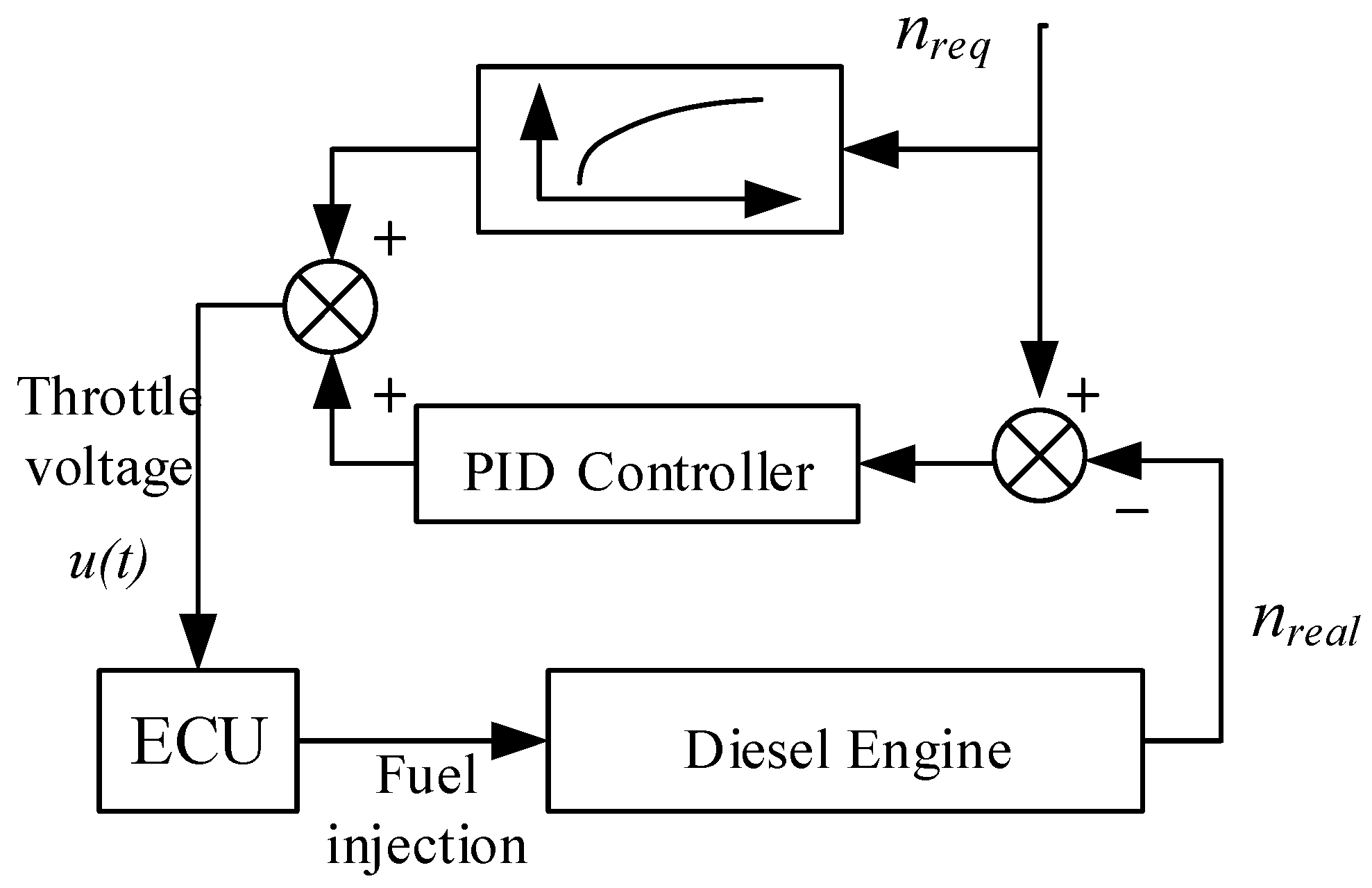
4.1. The Engine Speed Closed-Loop Control Method
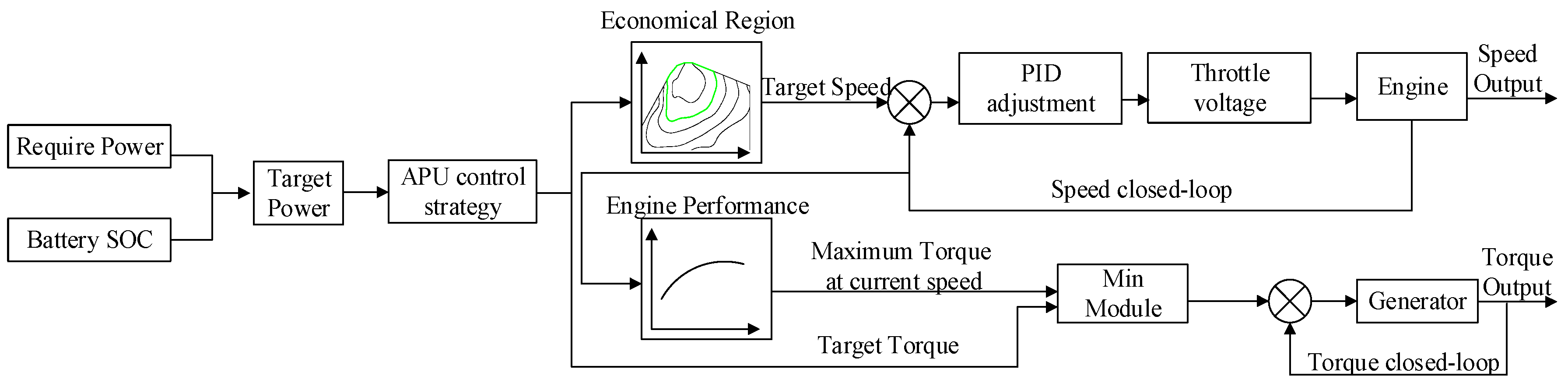
4.2. The Generator Torque Control Method
4.3. Engine–Generator Coordination Control Strategy
5. Experimental Research on the APU Test Bench
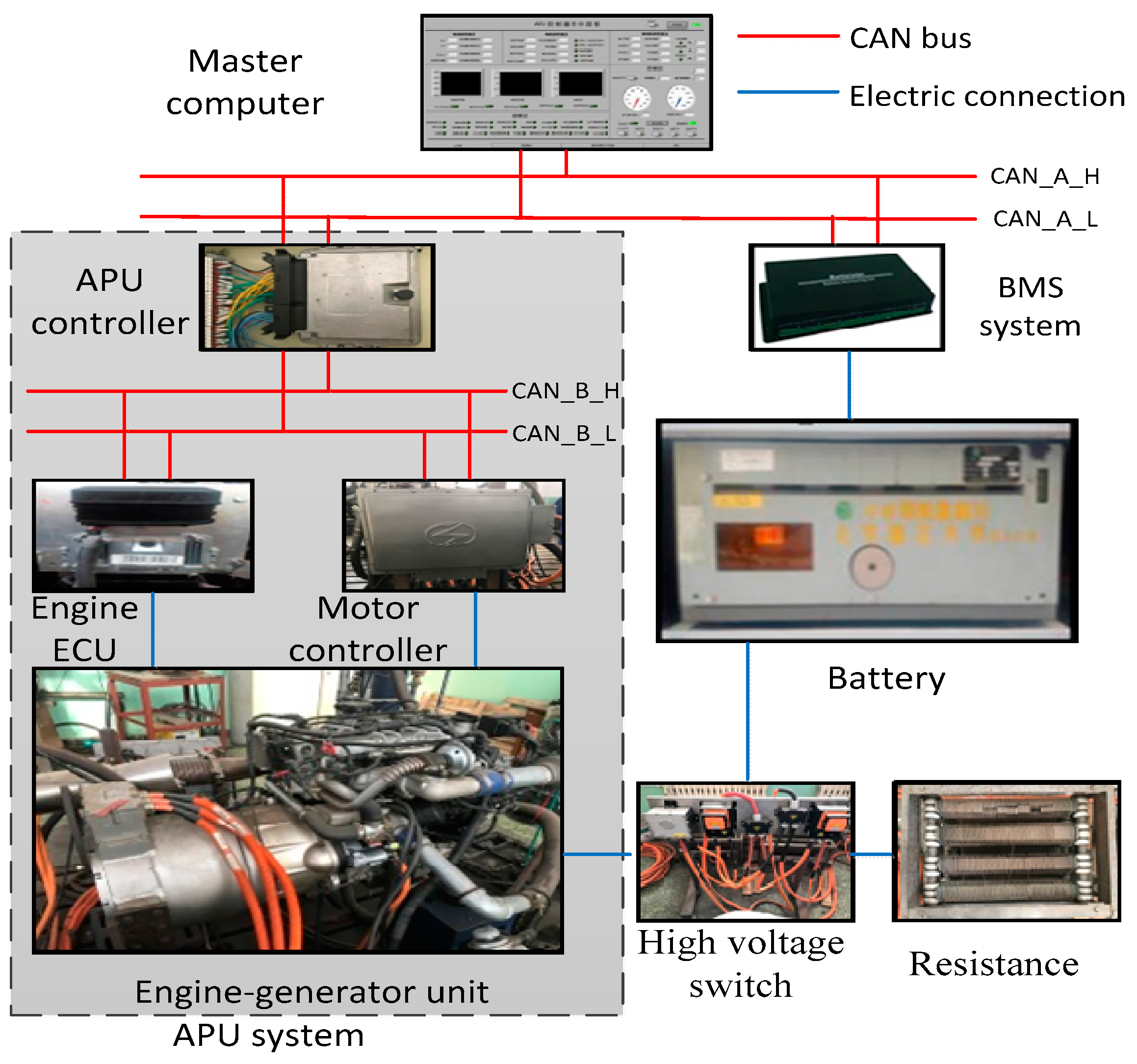
5.1. The APU Test Bench
5.2. APU Test Application
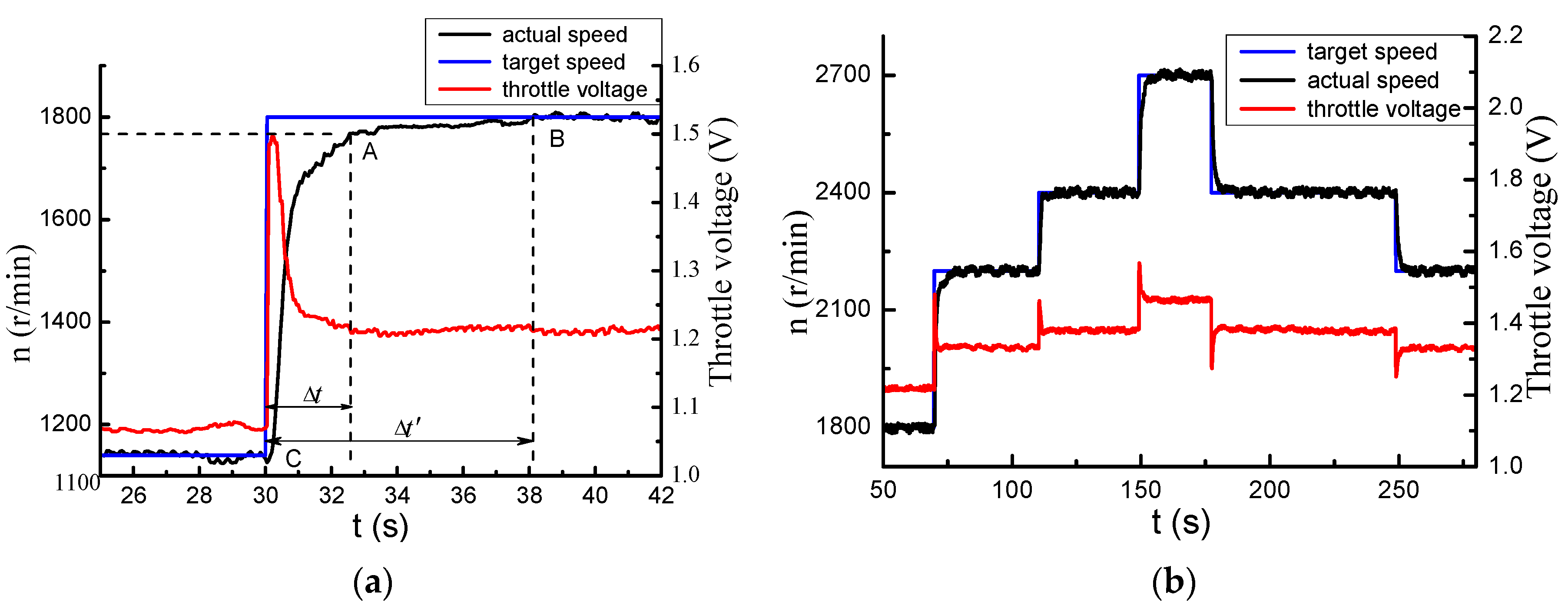
5.2.1. Engine Speed Control Test
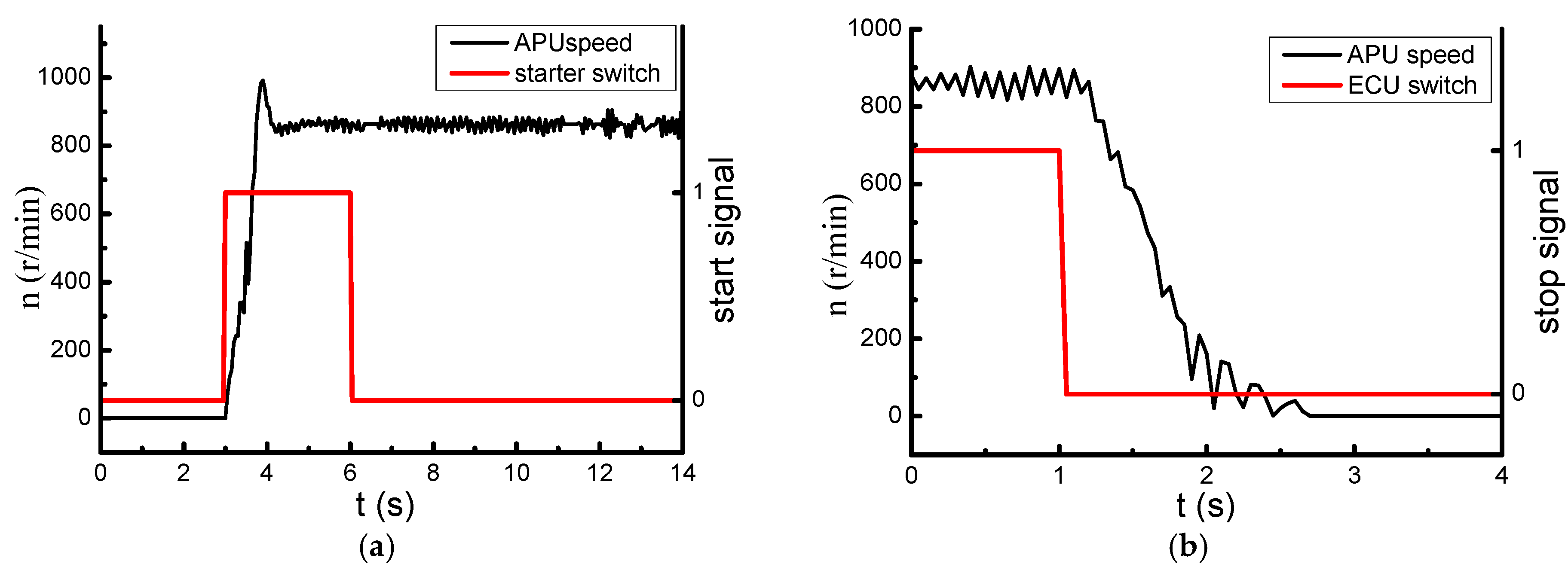
5.2.2. Start-Stop Test
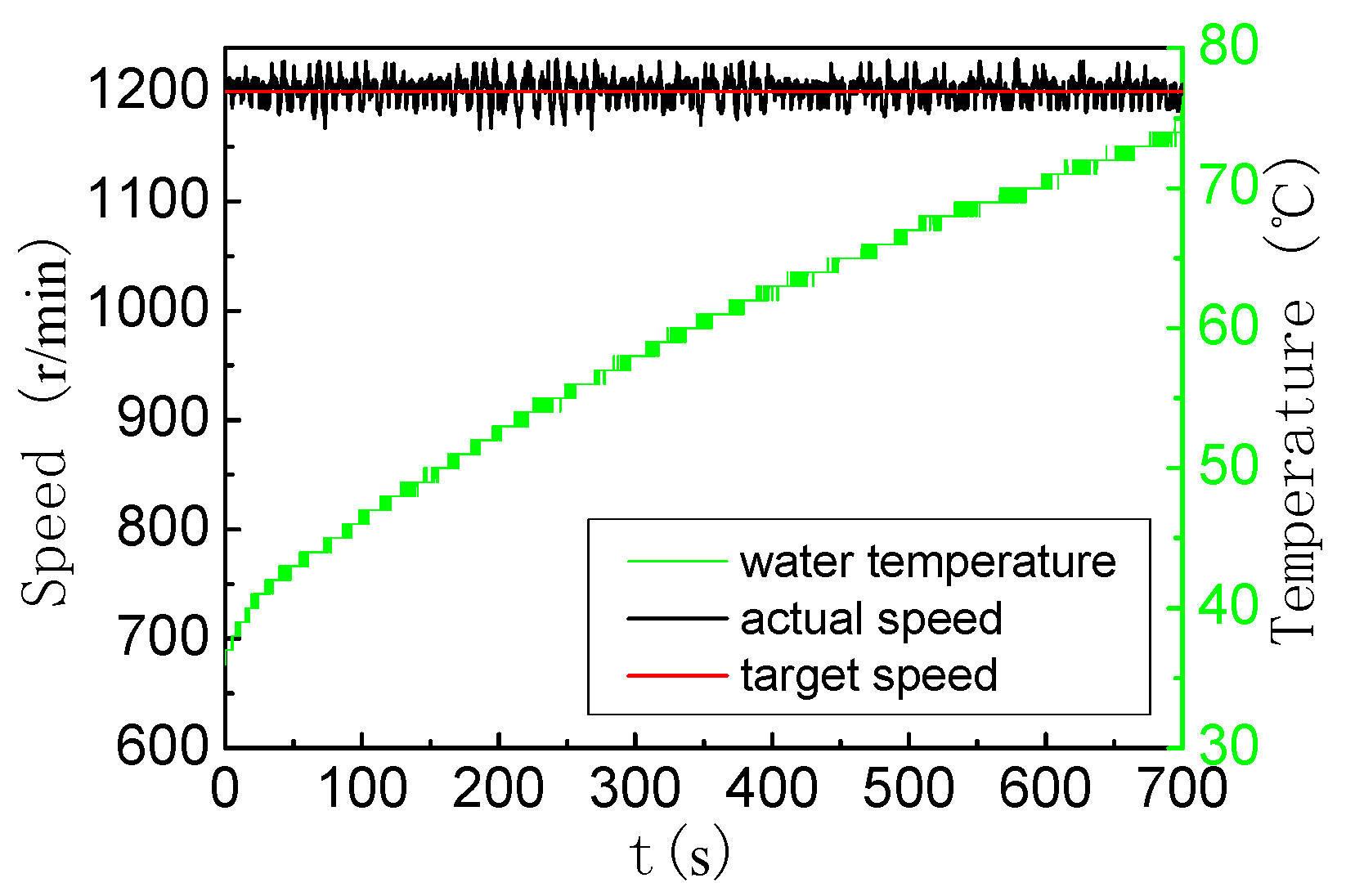
5.2.3. Warm-Up Test
5.2.4. Charging Test
5.3. APU Power Following the Experiment
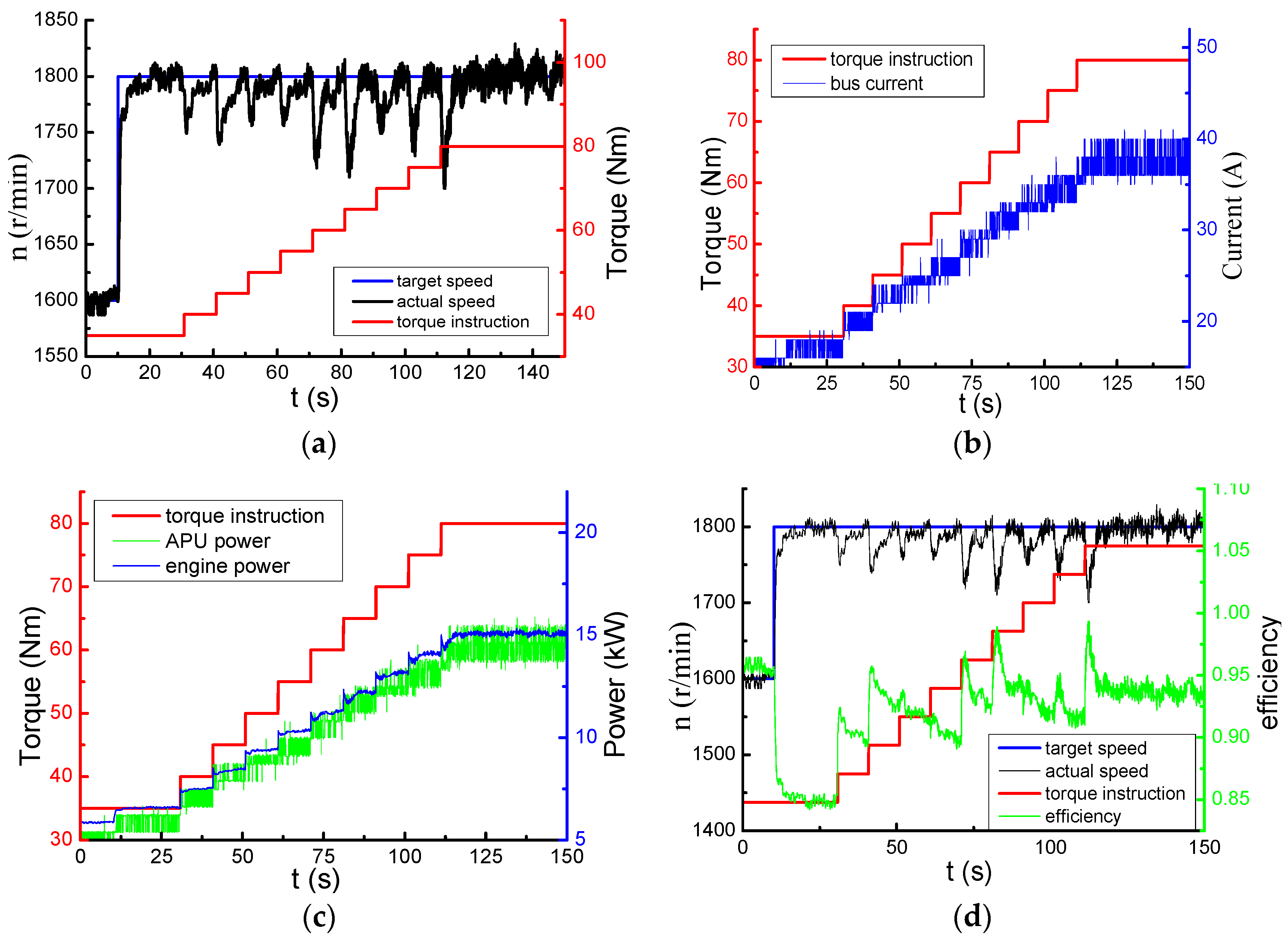
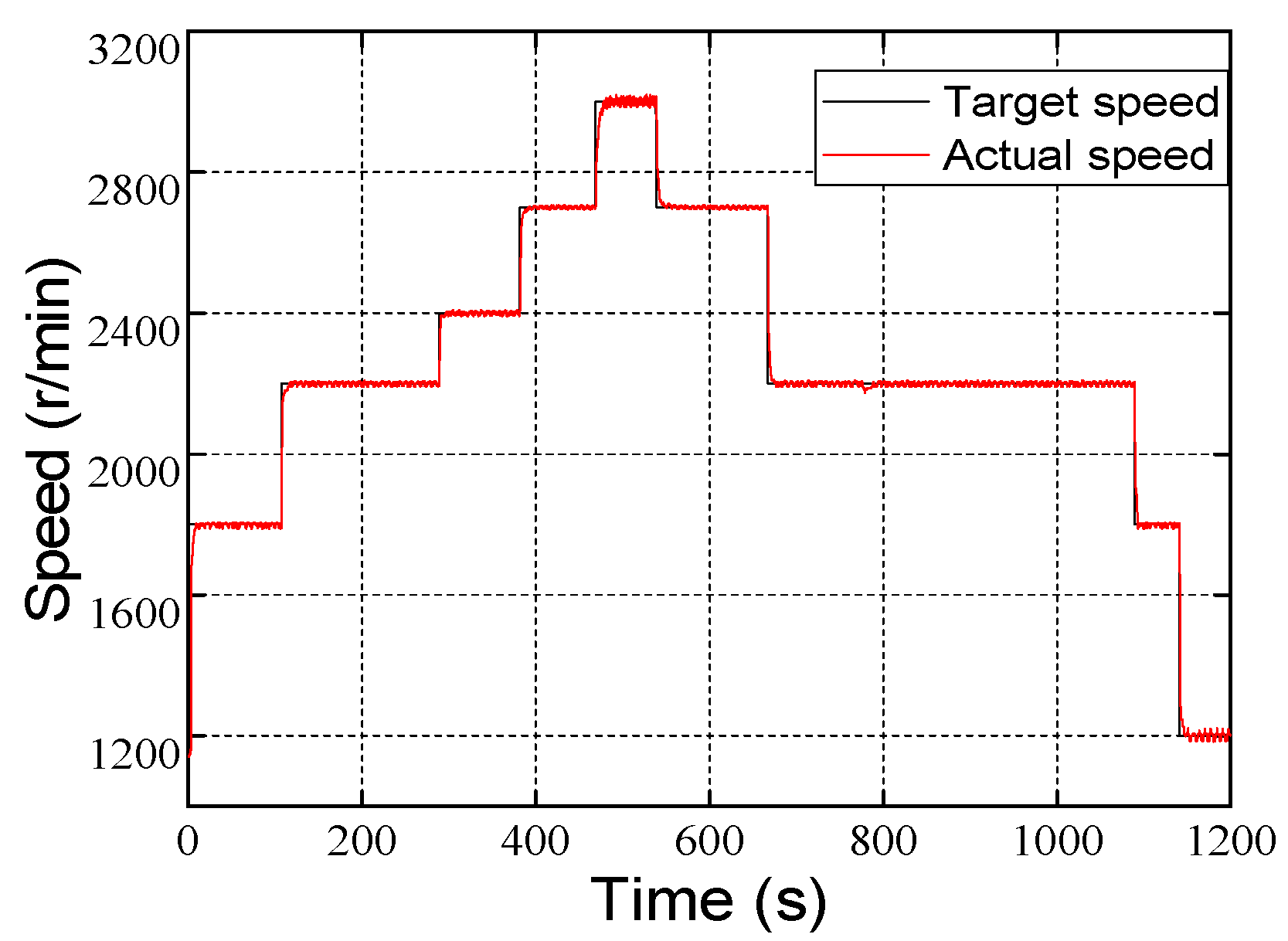
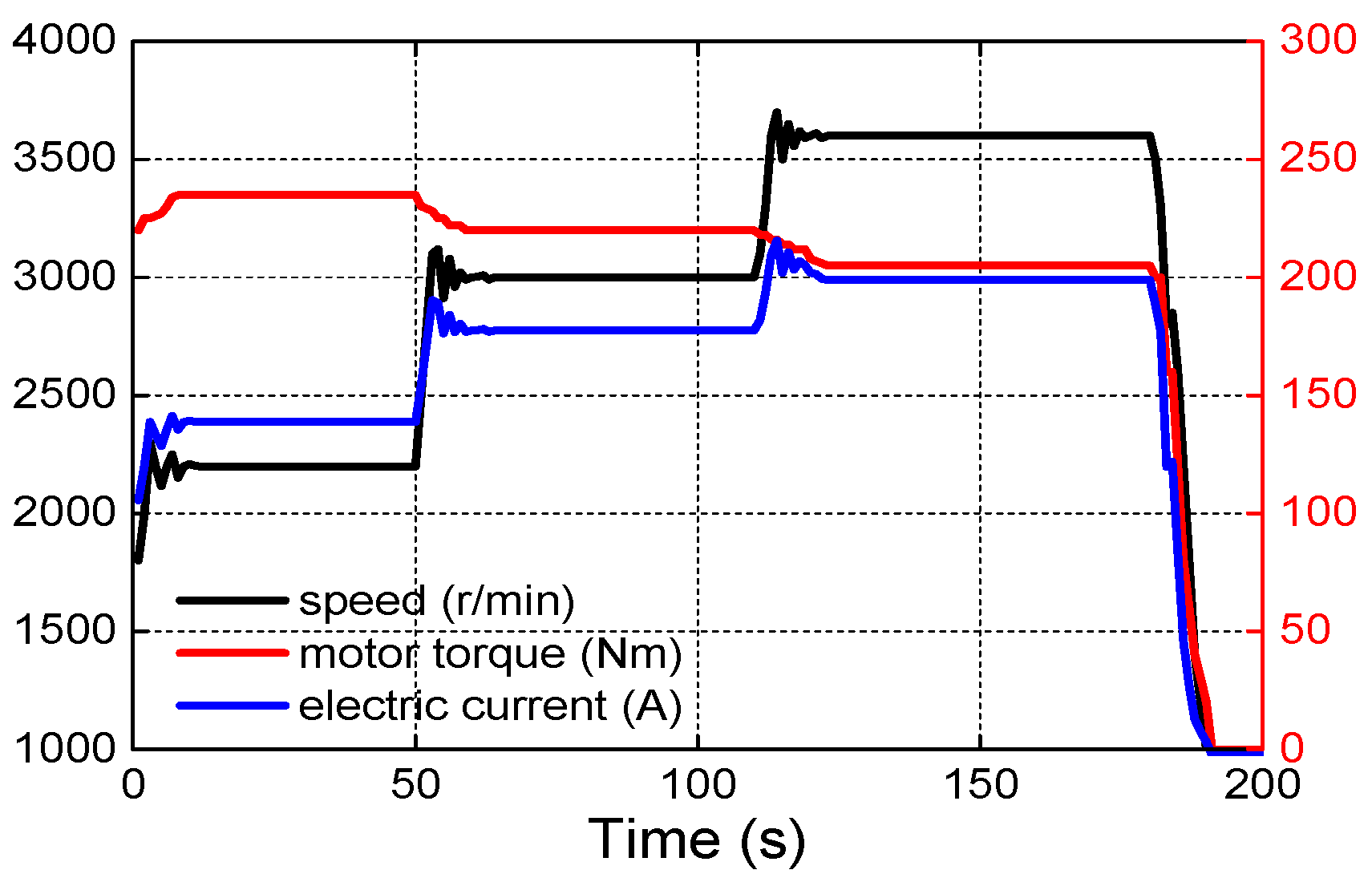
5.3.1. Speed Regulation Experiment
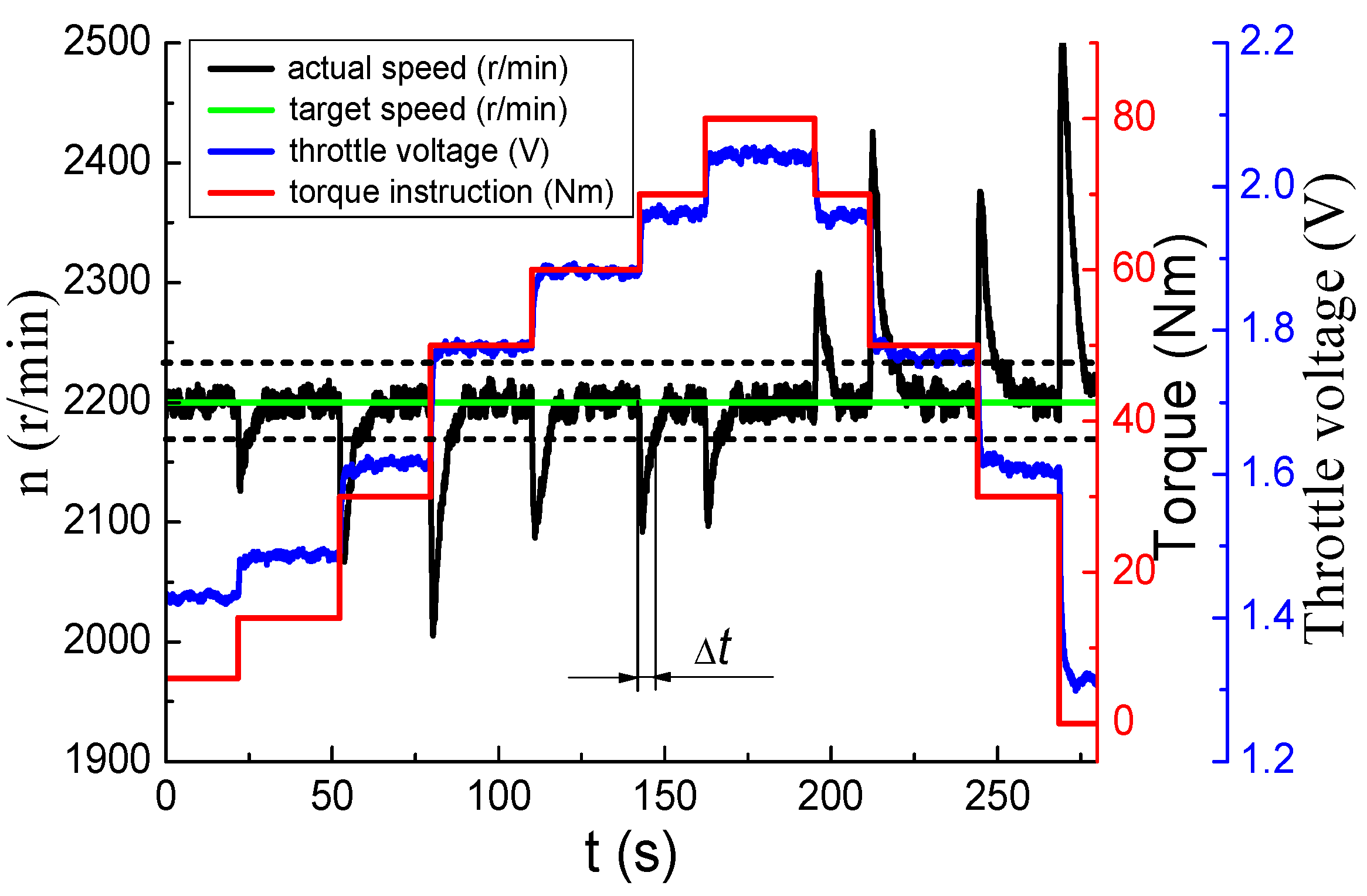
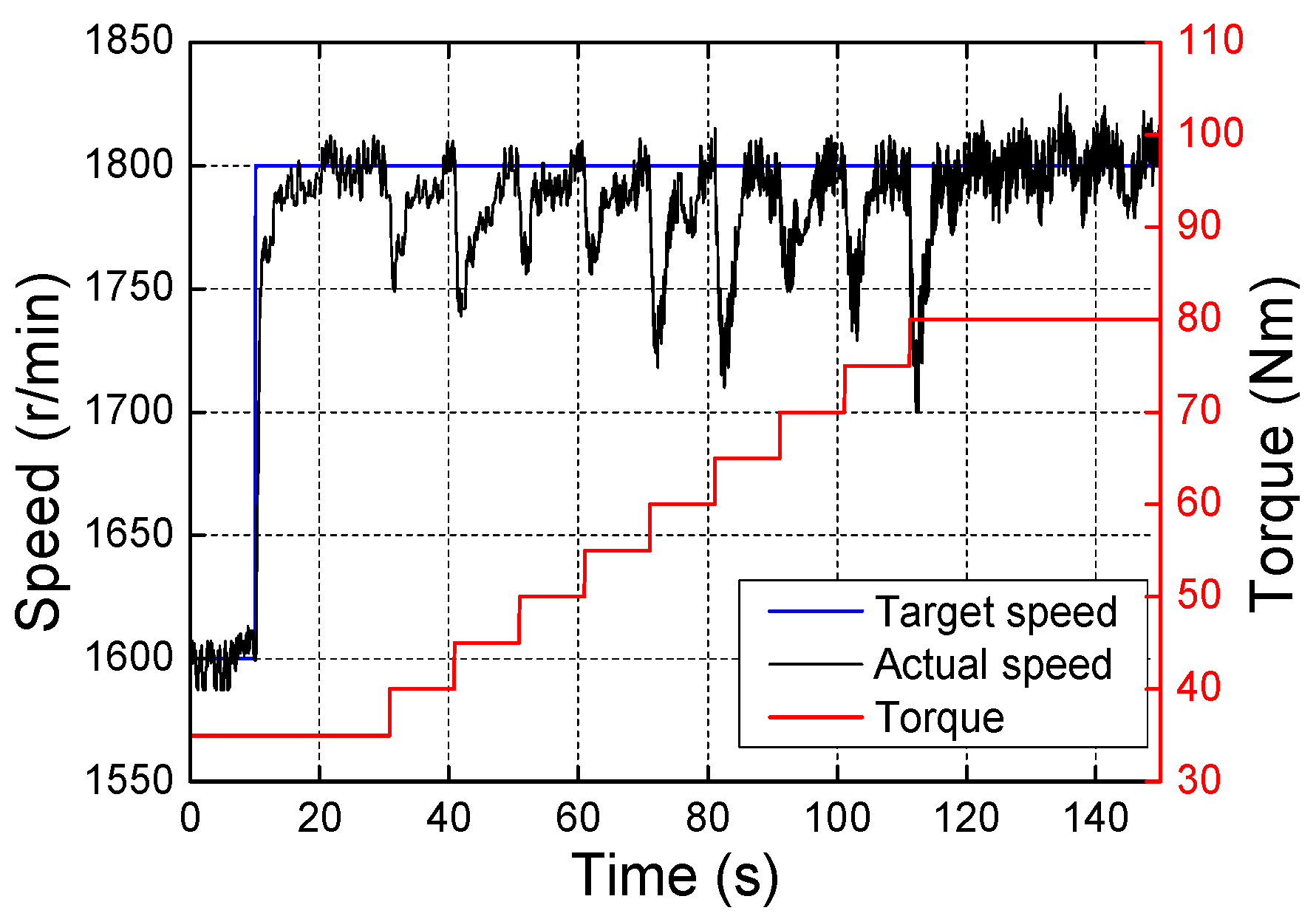
5.3.2. Torque Regulation Experiment
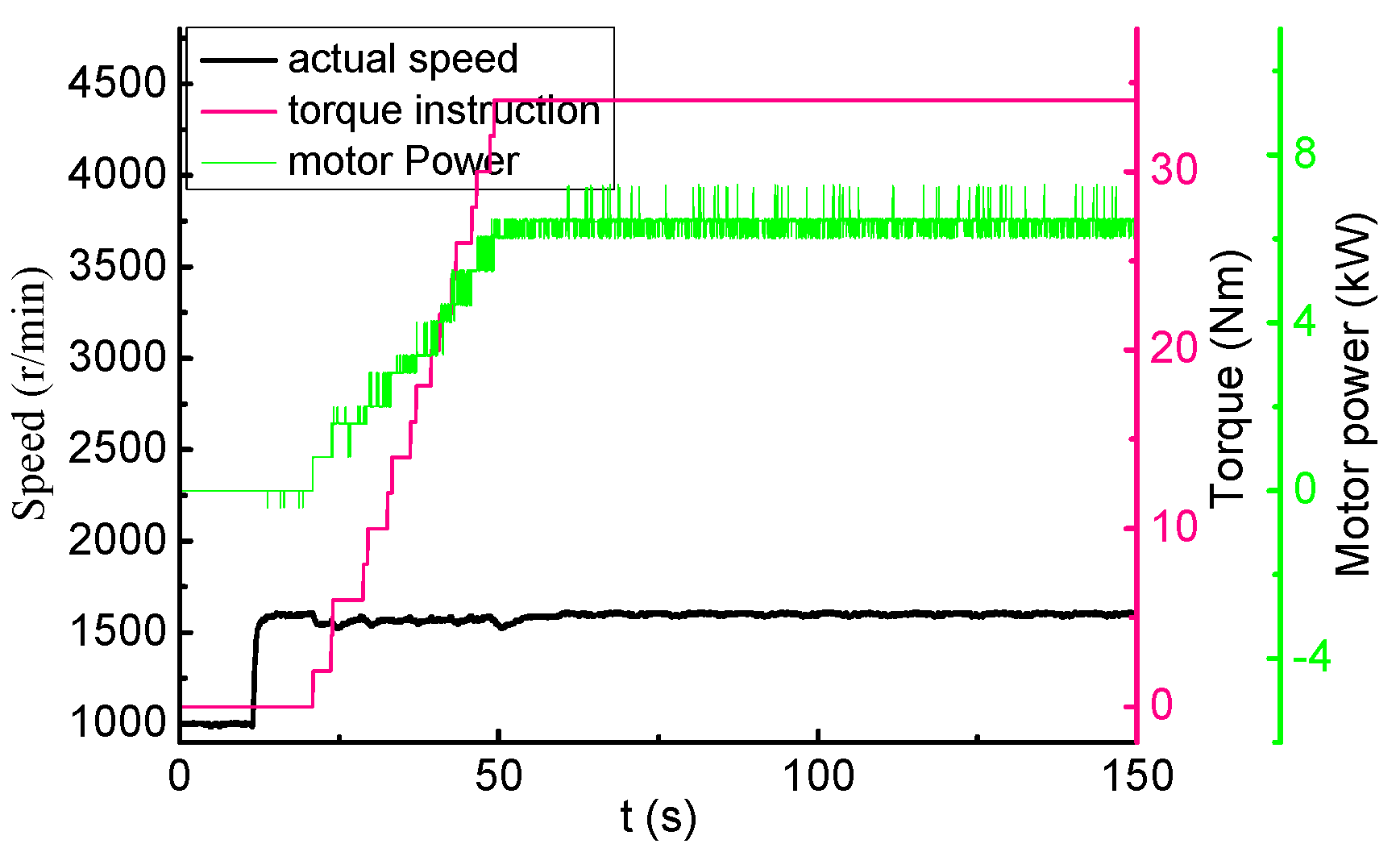
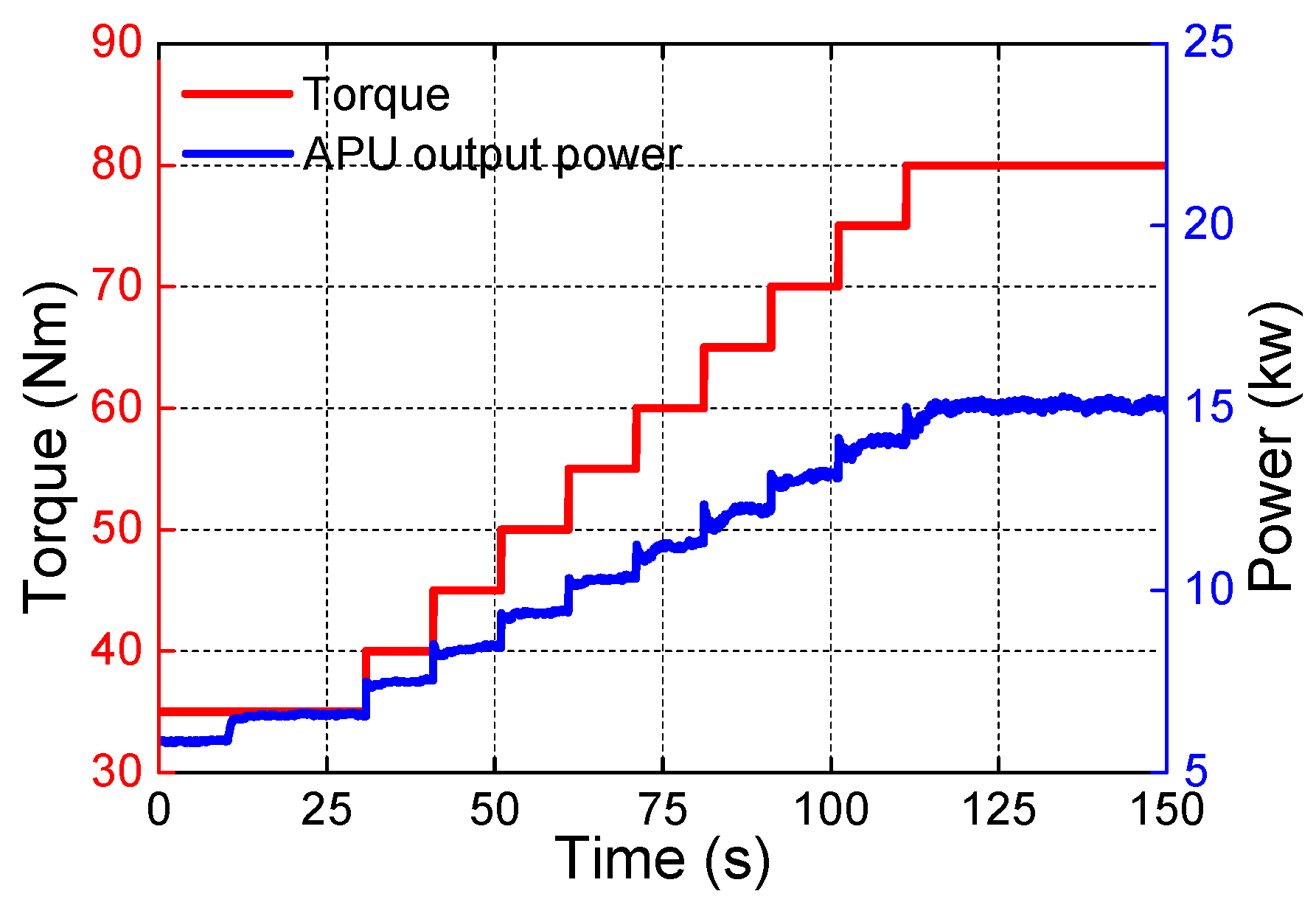
5.3.3. Power Regulation Experiment
6. Conclusions
- (1)
- A new integrated system was built that used APU parts, in the electrical vehicle work state, and fulfilled the performance requirements. The optimization algorithm of the APU parameters, based on the characteristics of the efficiency maps of the engine and the generator, was analyzed and developed.
- (2)
- An APU controller was designed to combine the hardware, software, and communication system design, which considered the optimization coordination control strategy for engine speed and generator torque.
- (3)
- The comprehensive test bench of the APU system was constructed, which can receive instructions from electric vehicles and feedback from the battery SOC. The controller of the designed APU system can deal with the engine acquisition and generator data, communicate with the battery system, and automatically control APU work at a reasonable speed and torque according to the power demand of the vehicle. All input and output parameters and the control processing can be displayed in real time on a computer.
- (4)
- The engine speed control and integrated control experiment of the APU system were completed on the test bench. The power regulation experiment results for the optimization of design parameters were obtained. The test results showed that the test control system and the relevant control logic are reliable. The APU-integrated system can operate with high economic efficiency and fulfil the RE-EV vehicle performance requirements.
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
| Vehicle demand power | |
| Vehicle mass | |
| Rolling resistance coefficient | |
| Road gradient | |
| Air resistance coefficient | |
| Frontal area | |
| Driving speed | |
| Vehicle rotational mass conversion factor | |
| Mechanical transmission efficiency | |
| Fuel consumption rate | |
| Engine speed | |
| Power of the engine output | |
| Engine torque | |
| Engine efficiency | |
| Enthalpy flow | |
| Fuel mass flow | |
| Fuel’s lower hearting value | |
| Efficiency of the generator | |
| Speed of the generator | |
| Output power of the generator | |
| Throttle voltage | |
| Proportional gain | |
| Integral time | |
| Derivative time | |
| Difference | |
| Test feed forward value | |
| Electromagnetic torque | |
| Pole pairs | |
| , | The d- and q-axis magnetic linkage |
| Fundamental flux magnetic linkage | |
| , | The d- and q-axis inductance |
| , | The d- and q-axis currents |
References
- Markle, T. Plug-in HEV Vehicle Design Options and Expectations, ZEV Technology Symposium; National Renewable Energy Laboratory: Golden, CO, USA, 2006; pp. 36–41. [Google Scholar]
- Al-Alawi, B.M.; Bradley, T.H. Total Cost of Ownership, Payback, and Consumer Preference Modeling of Plug-in Hybrid Electric Vehicles. Appl. Energy 2013, 103, 488–506. [Google Scholar] [CrossRef]
- Wolschendorf, J.; Rzemien, K.; Gian, D. Development of Electric and Rang-Extended Electric Vehicles through Collaboration Partnerships. SAE Int. J. Passeng. Cars Electron. Electr. Syst. 2010, 3, 215–219. [Google Scholar] [CrossRef]
- Jalil, N.; Kheir, N.A.; Salman, M. A Rule-based Management Stratagy for a Series Hybrid Vehicle. In Proceedings of the American Control Conference, Albuquerque, NM, USA, 6 June 1997; pp. 689–693. [Google Scholar]
- Song, Z.; Hofmann, H.; Li, J.; Hou, J.; Han, X.; Ouyang, M. Energy Management Strategies Comparison for Electric Vehicles with Hybrid Energy Storage System. Appl. Energy 2014, 134, 321–331. [Google Scholar] [CrossRef]
- Chen, Z.; Xia, B.; You, C.; Mi, C. A Novel Energy Management Method for Series Plug-in Hybrid Electric Vehicles. Appl. Energy 2015, 145, 172–179. [Google Scholar] [CrossRef]
- Du, J.; Chen, J.; Gao, M.; Wang, J. Energy Efficiency Oriented Design Method of Power Management Strategy for Range-Extended Electric Vehicles. Math. Probl. Eng. 2016, 2016, 9203081. [Google Scholar] [CrossRef]
- Abdelgadir, A.A.; Alsawalhi, J.Y. Energy Management Optimization for an Extended Range Electric Vehicle. In Proceedings of the 2017 7th International Conference on Modeling, Simulation and Applied Optimization (ICMSAO), Sharjah, UAE, 4–6 April 2017. [Google Scholar]
- Li, J.; Jin, X.; Xiong, R. Multi-objective Optimization Study of Energy Management Strategy and Economic Analysis for A Range-extended Electric Bus. Appl. Energy 2017, 194, 798–807. [Google Scholar] [CrossRef]
- Xiong, R.; Zhang, Y.; He, H.; Zhou, X.; Pecht, M. A Double-scale, Particle-filtering, Energy State Prediction Algorithm for Lithium-ion Batteries. IEEE Trans. Ind. Electron. 2017, 65, 1526–1538. [Google Scholar] [CrossRef]
- Xiong, R.; Tian, J.; Mu, H.; Wang, C. A Systematic Model-based Degradation Behavior Recognition and Health Monitor Method of Lithium-ion Batteries. Appl. Energy 2017, 207, 367–378. [Google Scholar] [CrossRef]
- Xiong, R.; Cao, J.; Yu, Q.; He, H.; Sun, F. Critical Review on the Battery State of Charge Estimation Methods for Electric Vehicles. IEEE Access 2017, PP, 1. [Google Scholar] [CrossRef]
- Chen, B.; Wu, Y.; Tsai, H. Design and Analysis of Power Management Strategy for Range Extended Electric Vehicle Using Dynamic Programming. Appl. Energy 2014, 113, 1764–1774. [Google Scholar] [CrossRef]
- Zhang, S.; Xiong, R.; Sun, F. Model Predictive Control for Power Management in a Plug-In Hybrid Electric Vehicle with a Hybrid Energy Storage System. Appl. Energy 2017, 185, 1654–1662. [Google Scholar] [CrossRef]
- Skugor, B.; Deur, J. Instantaneous Optimization-Based Energy Management Control Strategy for Extended Range Electric Vehicle; SAE Technical Paper; SAE 2013 World Congress & Exhibition: Detroit, MI, USA, 2013. [Google Scholar]
- Chen, C.; Xiong, R.; Shen, W. A Lithium-ion Battery-in-the-loop Approach to Test and Validate Multi-scale Dual H Infinity Filters for State of Charge and Capacity Estimation. IEEE Trans. Power Electron. 2018, 33, 332–342. [Google Scholar] [CrossRef]
- Du, J.; Chen, J.; Song, Z.; Gao, M.; Ouyang, M. Design Method of a Power Management Strategy for Variable Battery Capacities Range-extended Electric Vehicles to Improve Energy Efficiency and Cost-effectiveness. Energy 2017, 121, 32–42. [Google Scholar] [CrossRef]
- Xiong, R.; Yu, Q.; Wang, L.; Lin, C. A Novel Method to Obtain the Open Circuit Voltage for the State of Charge of Lithium Ion Batteries in Electric Vehicles by Using H Infinity Filter. Appl. Energy 2017, 207, 341–348. [Google Scholar] [CrossRef]
- Xiong, R.; Cao, J.; Yu, Q. Reinforcement Learning-based Real-time Power Management for Hybrid Energy Storage System in the Plug-in Hybrid Electric Vehicle. Appl. Energy 2018, 211, 538–548. [Google Scholar] [CrossRef]
- Rodrigues, M.; King, S.; Scott, D.; Wang, D. Advanced Energy Management Strategies for Range Extended Electric Vehicle; SAE Technical Paper; Tata Motors European Technical Centre: West Midlands, UK, 2015. [Google Scholar]
- Liu, G.; Zhang, J. Efficiency Optimization and Control of Auxiliary Power Unit for Extended Range Electric Vehicles. In Proceedings of the 2nd International Conference on Mechanical, Electronic and Information Technology Engineering (ICMITE 2016), Chongqing, China, 21–22 May 2016. [Google Scholar]
- Chen, L.; Wang, X.; Huang, X.; Gan, P.; Cheng, W. Modeling and Simulation of the Auxiliary Power System in Extended Range Electric Vehicle. Appl. Mech. Mater. 2013, 397–400, 1858–1862. [Google Scholar] [CrossRef]
- Lin, J.; Gu, J.; Yu, X. Study on SHEV Generator Grup Control Strategy Based on Fuzzy Theory. China Mech. Eng. 2013, 24, 1983–1987. [Google Scholar]
- He, B.; Yang, M. Robust LPV Control of Diesel Auxiliary Power Unit for Series Hybrid Electric Vehicles. IEEE Trans. Power Electron. 2006, 21, 791–798. [Google Scholar]
- Wang, D.; Xue, C.; Song, S.X. Parameter Matching and Performance Simulation for a Distributed Power Extended-Range Electric Vehicle. Appl. Mech. Mater. 2014, 496–500, 1360–1364. [Google Scholar] [CrossRef]
- Wu, D.; Lu, T.; Zhang, L.; Gong, X. Parameter Matching and Simulation Study of Powertrain for Extended-Range Electric Vehicle. Adv. Mater. Res. 2014, 926–930, 1387–1391. [Google Scholar] [CrossRef]
- Fiengo, G.; Glielmo, L.; Vasca, F. Control of Auxiliary Power Unit for Hybrid Electric Vehicles. IEEE Trans. Control Syst. Technol. 2007, 15, 1122–1130. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhou, H.; Lin, C.; Wang, L. A Study on Energy Management Control Strategy for an Extended-Range Electric Vehicle. In Proceedings of the International Conference on Energy and Mechanical Engineering (EME2015), Wuhan, China, 17–18 October 2015. [Google Scholar]
- Zhang, H.; He, Z.; Wang, Y. Control Strategy Research of Auxiliary Power Unit in Range-Extended Electric Bus. In Proceedings of the 2014 IEEE Transportation Electrification Conference and Expo Asia-Pacific, Beijing, China, 31 August–3 September 2014. [Google Scholar]
- Zhang, X.; Mi, C. Vehicle Power Management: Modeling, Control and Optimization; Springer: London, UK, 2011. [Google Scholar]
- Tang, T. Research on Permanent Magnet Synchronous Generator Sensorless Vector Control System. Master’s Thesis, Beijing Jiaotong University, Beijing, China, 2008; pp. 28–30. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Specification | |
| Maximum speed | 80 km/h |
| 0–50 km/h Acceleration time | t < 18 s |
| Vehicle mass/kg | 12,000 |
| Full mass max gradient | >20% |
| EV extended range (constant speed 40 km/h) | >150 km |
| Driving motor | |
| Motor types | PMSM |
| Rated power/Peak power | 100/200 (Kw) |
| Rated speed/Max speed | 800/3000 (r/min) |
| Max torque | 2500 (Nm) |
| Power battery | |
| Battery types | LiMn2O4 |
| Nominal voltage | 384 V |
| Rated capacity | 400 Ah |
| Engine | Parameters |
| Engine types | diesel |
| Engine displacement (L) | 1.9 |
| Speed range (r/min) | 850~4000 |
| Rated power (kW)/Speed (r/min) | 82/4000 |
| Maximum torque (Nm)/Speed (r/min) | 235/1800~2300 |
| Generator | Parameters |
| Generation types | PMSM |
| Rated voltage/V DC | 384 |
| Rated power/kW/Speed(r/min) | 65/2500 |
| Rated torque/(Nm) | 250 Nm |
| Speed range (r/min) | 0~4000 |
| Peak power kW/Torque/(Nm) | 86/330 |
| Speed (r/min) | Output Power (kW) | Consumption per Hour (kg/h) | Specific Fuel Consumption (g/kWh) |
|---|---|---|---|
| 2200 | 53 | 11.28 | 208.4 |
| 3000 | 69 | 15.10 | 218.5 |
| 3500 | 75 | 17.56 | 230.4 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Xing, Z.; Song, J.; Yang, Q. Development and Test Application of an Auxiliary Power-Integrated System. Energies 2018, 11, 187. https://doi.org/10.3390/en11010187
Zhang H, Xing Z, Song J, Yang Q. Development and Test Application of an Auxiliary Power-Integrated System. Energies. 2018; 11(1):187. https://doi.org/10.3390/en11010187
Chicago/Turabian StyleZhang, Hong, Zhuang Xing, Jiajian Song, and Qiangqiang Yang. 2018. "Development and Test Application of an Auxiliary Power-Integrated System" Energies 11, no. 1: 187. https://doi.org/10.3390/en11010187