
The Application of Piecewise Regularization Reconstruction to the Calibration of Strain Beams

 ,
,
Abstract
:1. Introduction
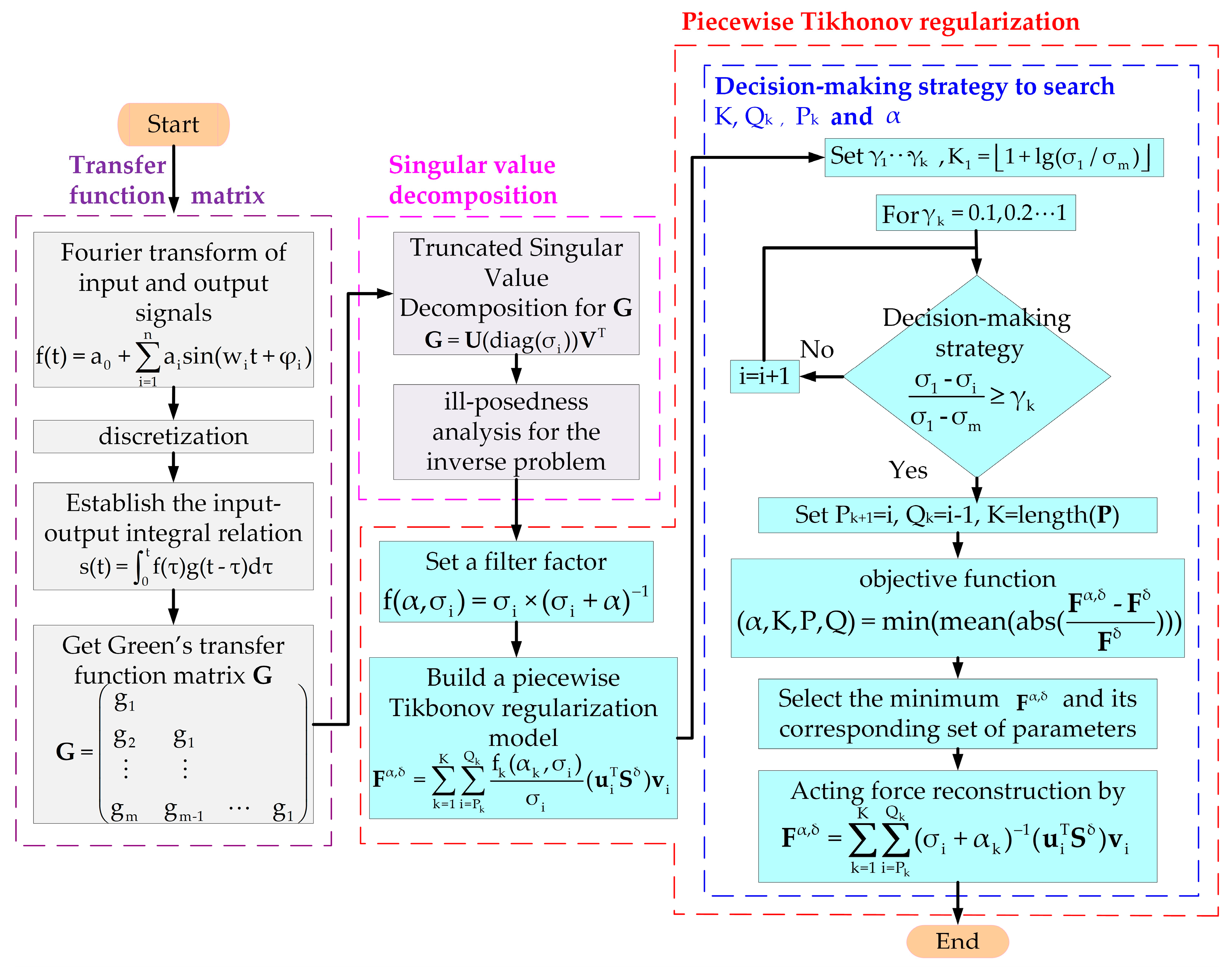
2. Overview of the PTR Model
3. Numerical Simulations
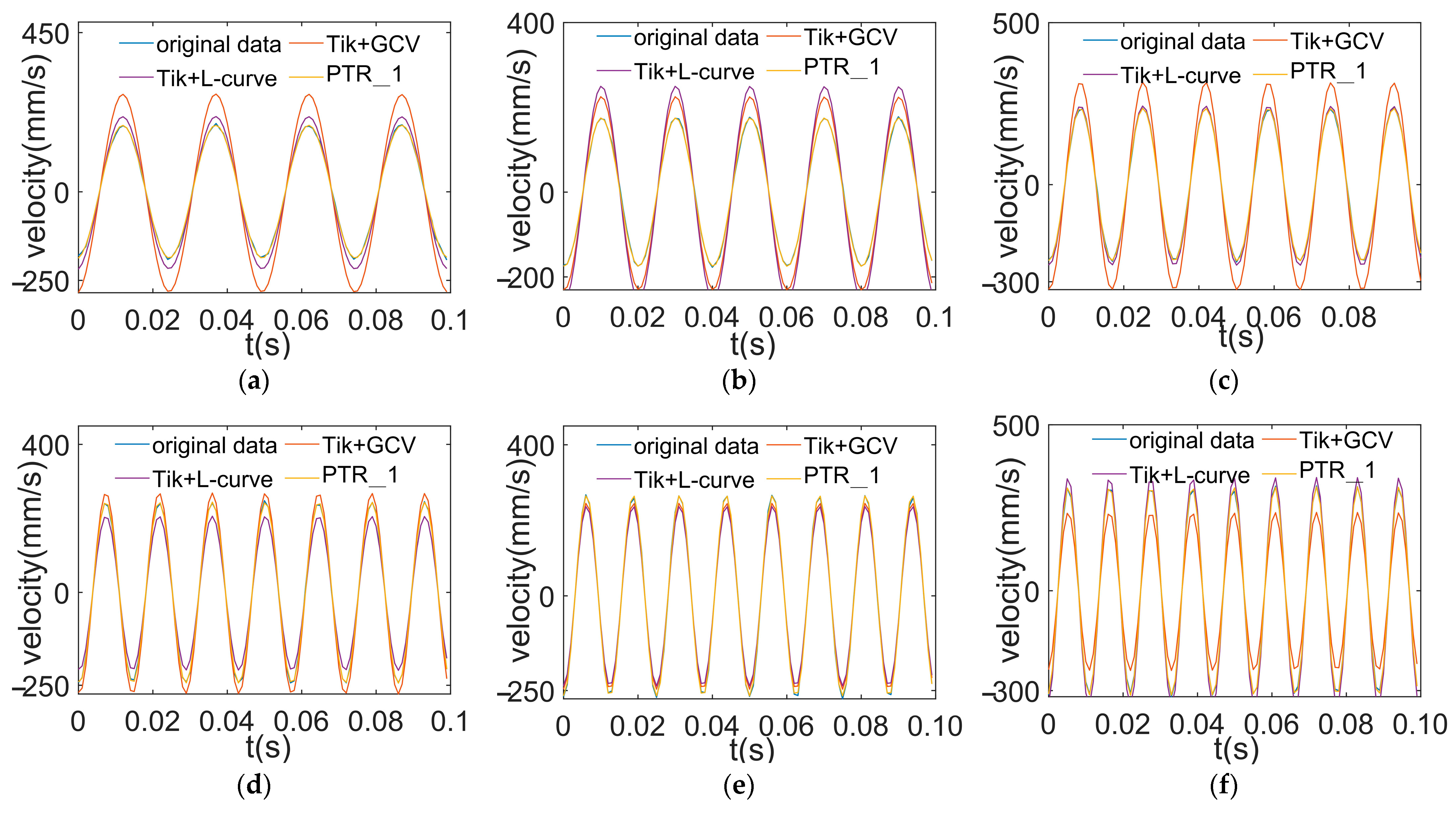
4. Experiment and Discussion
4.1. Experimental Setup
4.2. Data Analysis and Error Evaluation
5. Conclusions
- According to the finite element simulation analysis, the load reconstruction problem based on cantilever beams is ill posed. This underscores the necessity for advanced numerical methods to address the complexity of the inverse problem.
- The experimental results on the cantilever beams demonstrate that the PTR method accurately reconstructs loads across different frequency signals. When the initial transfer function matrix at 70 Hz is known, the reconstructed MRE and PRE are 6.20% and 3.54%, respectively. When the initial transfer function matrix at 80 Hz is known, the reconstructed MRE and PRE are 5.86% and 3.73%, respectively. The condition numbers obtained for the modified transfer function matrices are all close to 1, indicating the reliability of the reconstruction results. Compared with the traditional Tikhonov regularization method, the PTR method exhibits significantly reduced MREs and PREs at different frequencies. Comparative analysis demonstrates that the PTR method is superior to the traditional Tikhonov regularization method.
- Future work will include studying the applicability of the PTR method to structures other than cantilever beams and exploring methods for load reconstruction using complex signals.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nyssen, F.; Tableau, N.; Lavazec, D.; Batailly, A. Experimental and Numerical Characterization of a Ceramic Matrix Composite Shroud Segment under Impact Loading. J. Sound Vib. 2020, 467, 115040. [Google Scholar] [CrossRef]
- Wang, Q.; Xu, F.; Guo, W.; Gao, M. New Technique for Impact Calibration of Wide-Range Triaxial Force Transducer Using Hopkinson Bar. Sensors 2022, 22, 4885. [Google Scholar] [CrossRef] [PubMed]
- Du, L.; Jiang, W.; Luo, Z.; Song, H.; Yang, L.; Li, H. Multi FBG Sensor-Based Impact Localization with a Hybrid Correlation Interpolation Method. Meas. Sci. Technol. 2022, 33, 075002. [Google Scholar] [CrossRef]
- Li, Q.; Hou, M.; Cao, H. Online Identification of Milling Loads Using Acceleration Signals. Int. J. Adv. Manuf. Technol. 2023, 127, 4491–4501. [Google Scholar] [CrossRef]
- Sanchez, J.; Benaroya, H. Review of Force Reconstruction Techniques. J. Sound Vib. 2014, 333, 2999–3018. [Google Scholar] [CrossRef]
- Liu, R.; Dobriban, E.; Hou, Z.; Qian, K. Dynamic Load Identification for Mechanical Systems: A Review. Arch. Comput. Methods Eng. 2022, 29, 831–863. [Google Scholar] [CrossRef]
- Liu, C.S.; Kuo, C.L.; Chang, C.W. Recovering External Loads on Vibrating Euler–Bernoulli Beams Using Boundary Shape Function Methods. Mech. Syst. Signal Process. 2021, 148, 107157. [Google Scholar] [CrossRef]
- Zhao, M.; Wu, G.; Wang, K. Comparative Analysis of Dynamic Response of Damaged Wharf Frame Structure under the Combined Action of Ship Collision Load and Other Static Loads. Buildings 2022, 12, 1131. [Google Scholar] [CrossRef]
- Zhang, E.; Antoni, J.; Feissel, P. Bayesian Force Reconstruction with an Uncertain Model. J. Sound Vib. 2012, 331, 798–814. [Google Scholar] [CrossRef]
- Yan, G.; Sun, H. A Non-Negative Bayesian Learning Method for Impact Load Reconstruction. J. Sound Vib. 2019, 457, 354–367. [Google Scholar] [CrossRef]
- Li, Q.; Lu, Q. Time Domain Force Identification Based on Adaptive ℓq Regularization. J. Vib. Control 2018, 24, 5610–5626. [Google Scholar] [CrossRef]
- Prawin, J.; Rao, A.R.M. An Online Input Load Time History Reconstruction Algorithm Using Dynamic Principal Component Analysis. Mech. Syst. Signal Process. 2018, 99, 516–533. [Google Scholar] [CrossRef]
- Jiang, W.S.; Wang, Z.Y.; Lv, J. A Fractional-Order Accumulative Regularization Filter for Force Reconstruction. Mech. Syst. Signal Process. 2018, 101, 405–423. [Google Scholar] [CrossRef]
- Pallekonda, R.B.; Nanda, S.R.; Dwivedy, S.K.; Kulkarni, V.; Menezes, V. Soft Computing Based Force Recovery Technique for Hypersonic Shock Tunnel Tests. Int. J. Struct. Stab. Dyn. 2018, 18, 1871004. [Google Scholar] [CrossRef]
- Cumbo, R.; Mazzanti, L.; Tamarozzi, T.; Jiranek, P.; Desmet, W.; Naets, F. Advanced Optimal Sensor Placement for Kalman-Based Multiple-input Estimation. Mech. Syst. Signal Process. 2021, 160, 107830. [Google Scholar] [CrossRef]
- Lourens, E.; Fallais, D. Full-Field Response Monitoring in Structural Systems Driven by a Set of Identified Equivalent Loads. Mech. Syst. Signal Process. 2019, 114, 106–119. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, Y.; Lei, Y.; Yang, N. Identification of Distributed Dynamic Loads in Gradually Varying Two Spatial Dimensions Based on Discrete Cosine Transform and Kalman Filter with Unknown Inputs. J. Aerosp. Eng. 2023, 36, 04023052. [Google Scholar] [CrossRef]
- Zou, D.; Zhao, H.; Liu, G.; Ta, N.; Rao, Z. Application of Augmented Kalman Filter to Identify Unbalance Load of Rotor-Bearing System: Theory and experiment. J. Sound Vib. 2019, 463, 114972. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, Y. A Comprehensive Survey on Regularization Strategies in Machine Learning. Inf. Fusion 2022, 80, 146–166. [Google Scholar] [CrossRef]
- Lu, C.; Zhu, L.; Liu, J.; Meng, X.; Li, K. The Least Squares Time Element Method Based on Wavelet Approximation for Structural Dynamic Load Identification. Int. J. Comput. Methods 2023, 20, 2350008. [Google Scholar] [CrossRef]
- Miao, B.; Zhou, F.; Jiang, C.; Luo, Y.; Chen, H. A Load Identification Application Technology Based on Regularization Method and Finite Element Modified Model. Shock Vib. 2020, 2020, 8875697. [Google Scholar] [CrossRef]
- Tang, Z.; Zhang, Z.; Xu, Z.; He, Y.; Jin, J. Load Identification with Regularized Total Least-Squares Method. J. Vib. Control 2022, 28, 3058–3069. [Google Scholar] [CrossRef]
- Sun, X.; Cui, J.; Chen, Y.; Tan, J. A Novel Method for Identifying Rotor Unbalance Parameters in the Time Domain. Meas. Sci. Technol. 2022, 34, 035008. [Google Scholar] [CrossRef]
- He, Z.; Lin, X.; Li, E. A Novel Method for Load Bounds Identification for Uncertain Structures in Frequency Domain. Int. J. Comput. Methods 2018, 15, 1850051. [Google Scholar] [CrossRef]
- Miao, B.; Zhou, F.; Jiang, C.; Chen, X.; Yang, S. A Comparative Study of Regularization Method in Structure Load Identification. Shock Vib. 2018, 2018, 9204865. [Google Scholar] [CrossRef]
- Wang, L.J.; Gao, X.; Xie, Y.X.; Fu, J.J.; Du, Y.X. A New Conjugate Gradient Method and Application to Dynamic Load Identification Problems. Int. J. Acoust. Vib. 2021, 26, 121–131. [Google Scholar] [CrossRef]
- Aucejo, M.; De Smet, O. An Iterated Multiplicative Regularization for Load Reconstruction Problems. J. Sound Vib. 2018, 437, 16–28. [Google Scholar] [CrossRef]
- Zheng, H.; Zhang, W. A Mixed Regularization Method for Ill-Posed Problems. Numer. Math. Theory Methods Appl. 2019, 12, 212–232. [Google Scholar] [CrossRef]
- Chang, X.; Yan, Y.; Wu, Y. Study on Solving the Ill-Posed Problem of Load Reconstruction. J. Sound Vib. 2019, 440, 186–201. [Google Scholar] [CrossRef]
- Chen, Z.; Fang, Y.; Kong, X.; Deng, L. Identification of Multi-Axle Vehicle Loads on Beam Type Bridge Based on Minimal Residual Norm Steepest Descent Method. J. Sound Vib. 2023, 563, 117866. [Google Scholar] [CrossRef]
- Yang, J.; Hou, P.; Yang, C.; Zhou, Y.; Zhang, G. Investigation on the Moving Load Identification for Bridges Based on Long-Gauge Strain Sensing and Skew-Laplace Fitting. Smart Mater. Struct. 2023, 32, 085026. [Google Scholar] [CrossRef]
- Pan, C.; Yu, L. Identification of External Forces via Truncated Response Sparse Decomposition under Unknown Initial Conditions. Adv. Struct. Eng. 2019, 22, 3161–3175. [Google Scholar] [CrossRef]
- Zhang, Z.; Huang, W.; Liao, Y.; Song, Z.; Shi, J.; Jiang, X.; Shen, C.; Zhu, Z. Bearing Fault Diagnosis via Generalized Logarithm Sparse Regularization. Mech. Syst. Signal Process. 2022, 167, 108576. [Google Scholar] [CrossRef]
- Qiao, B.; Ao, C.; Mao, Z.; Chen, X. Non-Convex Sparse Regularization for Impact Load Identification. J. Sound Vib. 2020, 477, 115311. [Google Scholar] [CrossRef]
- Liu, J.; Qiao, B.; Wang, Y.; He, W.; Chen, X. Non-Convex Sparse Regularization via Convex Optimization for Impact Load Identification. Mech. Syst. Signal Process. 2023, 191, 110191. [Google Scholar] [CrossRef]
- Liu, J.; Qiao, B.; He, W.; Yang, Z.; Chen, X. Impact Load Identification via Sparse Regularization with Generalized Minimax-Concave Penalty. J. Sound Vib. 2020, 484, 115530. [Google Scholar] [CrossRef]
- Tran, H.; Inoue, H. Development of Wavelet Deconvolution Technique for Impact Load Reconstruction: Application to Reconstruction of Impact Load Acting on a Load-Cell. Int. J. Impact Eng. 2018, 122, 137–147. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Freq./Hz | ∞ dB | 26 dB | 20 dB |
|---|---|---|---|
| 40 | 1.00 | 1.99 × 1010 | 1.66 × 1011 |
| 50 | 1.00 | 1.84 × 108 | 7.55 × 108 |
| 60 | 1.00 | 3.40 × 102 | 3.67 × 106 |
| 70 | 1.00 | 6.44 × 103 | 2.98 × 105 |
| 80 | 1.00 | 1.20 × 103 | 8.80 × 103 |
| 90 | 1.00 | 4.36 × 101 | 1.93 × 107 |
| Freq./Hz | MRE | PRE | ||||||
|---|---|---|---|---|---|---|---|---|
| ∞ dB | 26 dB | 20 dB | 14 dB | ∞ dB | 26 dB | 20 dB | 14 dB | |
| 40 | 0.00 | 11.99 | 47.59 | 93.53 | 0.00 | 1.69 | 8.10 | 24.41 |
| 50 | 0.00 | 35.15 | 66.10 | 127.75 | 0.00 | 4.24 | 13.75 | 45.90 |
| 60 | 0.00 | 11.55 | 33.71 | 79.54 | 0.00 | 5.66 | 14.30 | 27.48 |
| 70 | 0.00 | 11.91 | 30.05 | 60.41 | 0.00 | 6.32 | 10.04 | 39.23 |
| 80 | 0.00 | 16.09 | 53.63 | 73.03 | 0.00 | 2.30 | 5.57 | 21.45 |
| 90 | 0.00 | 7.78 | 25.67 | 48.92 | 0.00 | 5.63 | 8.46 | 33.30 |
| mean | 0.00 | 15.74 | 42.79 | 80.53 | 0.00 | 4.31 | 10.04 | 31.96 |
| Freq./Hz | Cor | |||
|---|---|---|---|---|
| ∞ dB | 26 dB | 20 dB | 14 dB | |
| 40 | 1.000 | 0.999 | 0.995 | 0.982 |
| 50 | 1.000 | 0.998 | 0.995 | 0.980 |
| 60 | 1.000 | 0.998 | 0.995 | 0.978 |
| 70 | 1.000 | 0.999 | 0.994 | 0.979 |
| 80 | 1.000 | 0.998 | 0.995 | 0.980 |
| 90 | 1.000 | 0.998 | 0.995 | 0.979 |
| mean | 1.000 | 0.998 | 0.995 | 0.979 |
| Freq./Hz | PTR_1 | PTR_2 | ||||
|---|---|---|---|---|---|---|
| 70 | 0.8 | 2 | 1–9 10–100 | 3 | 1–9 10–14 15–100 | |
| 80 | 0.8 | 2 | 1–99 100–100 | 3 | 1–9 10–99 100–100 | |
| Freq./Hz | GCV | L-Curve | PTR | |
|---|---|---|---|---|
| 70 | 40 | 29.28 | 38.43 | 8.45 |
| 50 | 56.08 | 22.63 | 5.73 | |
| 60 | 21.82 | 44.39 | 8.98 | |
| 70 | 9.05 | 9.22 | 5.71 | |
| 80 | 19.98 | 12.69 | 3.40 | |
| 90 | 34.40 | 52.55 | 4.95 | |
| mean | 28.44 | 29.98 | 6.20 | |
| 80 | 40 | 48.02 | 14.93 | 4.58 |
| 50 | 29.99 | 43.34 | 4.24 | |
| 60 | 55.96 | 16.55 | 7.23 | |
| 70 | 16.51 | 16.06 | 6.47 | |
| 80 | 8.10 | 9.97 | 4.27 | |
| 90 | 27.28 | 9.68 | 6.01 | |
| mean | 29.61 | 18.42 | 5.86 | |
| Freq./Hz | GCV | L-Curve | PTR | |
|---|---|---|---|---|
| 70 | 40 | 25.54 | 37.66 | 3.03 |
| 50 | 59.46 | 21.30 | 2.67 | |
| 60 | 15.42 | 43.28 | 3.15 | |
| 70 | 7.63 | 8.84 | 2.31 | |
| 80 | 16.58 | 13.15 | 5.39 | |
| 90 | 37.40 | 52.80 | 4.68 | |
| mean | 27.01 | 29.50 | 3.54 | |
| 80 | 40 | 44.88 | 13.30 | 4.52 |
| 50 | 28.51 | 42.48 | 3.54 | |
| 60 | 33.30 | 3.18 | 4.12 | |
| 70 | 16.10 | 15.58 | 5.05 | |
| 80 | 10.27 | 10.35 | 3.05 | |
| 90 | 27.39 | 8.52 | 3.43 | |
| mean | 26.88 | 15.56 | 3.73 | |
| Freq./Hz | GCV | PTR_1 | PTR_2 | |
|---|---|---|---|---|
| 70 | 40 | 29.28 | 8.45 | 4.46 |
| 50 | 56.08 | 5.73 | 25.58 | |
| 60 | 21.82 | 8.98 | 17.79 | |
| 70 | 9.05 | 5.71 | 5.93 | |
| 80 | 19.98 | 3.40 | 5.69 | |
| 90 | 34.40 | 4.95 | 4.12 | |
| mean | 28.44 | 6.20 | 10.60 | |
| 80 | 40 | 48.02 | 4.58 | 4.93 |
| 50 | 29.99 | 4.24 | 7.07 | |
| 60 | 55.96 | 7.23 | 20.83 | |
| 70 | 16.51 | 6.47 | 8.18 | |
| 80 | 8.10 | 4.27 | 4.00 | |
| 90 | 27.28 | 6.01 | 3.44 | |
| mean | 29.61 | 5.86 | 9.43 | |
| Freq./Hz | GCV | PTR_1 | PTR_2 | |
|---|---|---|---|---|
| 70 | 40 | 25.54 | 3.03 | 4.15 |
| 50 | 59.46 | 2.67 | 12.37 | |
| 60 | 15.42 | 3.15 | 2.35 | |
| 70 | 7.63 | 2.31 | 3.42 | |
| 80 | 16.58 | 5.39 | 2.55 | |
| 90 | 37.40 | 4.68 | 2.57 | |
| mean | 27.01 | 3.54 | 4.57 | |
| 80 | 40 | 44.88 | 4.52 | 3.39 |
| 50 | 28.51 | 3.54 | 2.74 | |
| 60 | 33.30 | 4.12 | 8.39 | |
| 70 | 16.10 | 5.05 | 3.68 | |
| 80 | 10.27 | 3.05 | 6.78 | |
| 90 | 27.39 | 3.43 | 3.76 | |
| mean | 26.88 | 3.73 | 4.67 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Jiang, W.; Luo, Z.; Zhang, P.; Yang, L.; Cheng, Y.; Bian, D.; Li, Y. The Application of Piecewise Regularization Reconstruction to the Calibration of Strain Beams. Sensors 2024, 24, 2744. https://doi.org/10.3390/s24092744
Liu J, Jiang W, Luo Z, Zhang P, Yang L, Cheng Y, Bian D, Li Y. The Application of Piecewise Regularization Reconstruction to the Calibration of Strain Beams. Sensors. 2024; 24(9):2744. https://doi.org/10.3390/s24092744
Chicago/Turabian StyleLiu, Jingjing, Wensong Jiang, Zai Luo, Penghao Zhang, Li Yang, Yinbao Cheng, Dian Bian, and Yaru Li. 2024. "The Application of Piecewise Regularization Reconstruction to the Calibration of Strain Beams" Sensors 24, no. 9: 2744. https://doi.org/10.3390/s24092744