
Fusion of Multimodal Imaging and 3D Digitization Using Photogrammetry

Abstract
:1. Introduction
1.1. Motivation
1.2. State of the Art
2. Materials and Methods
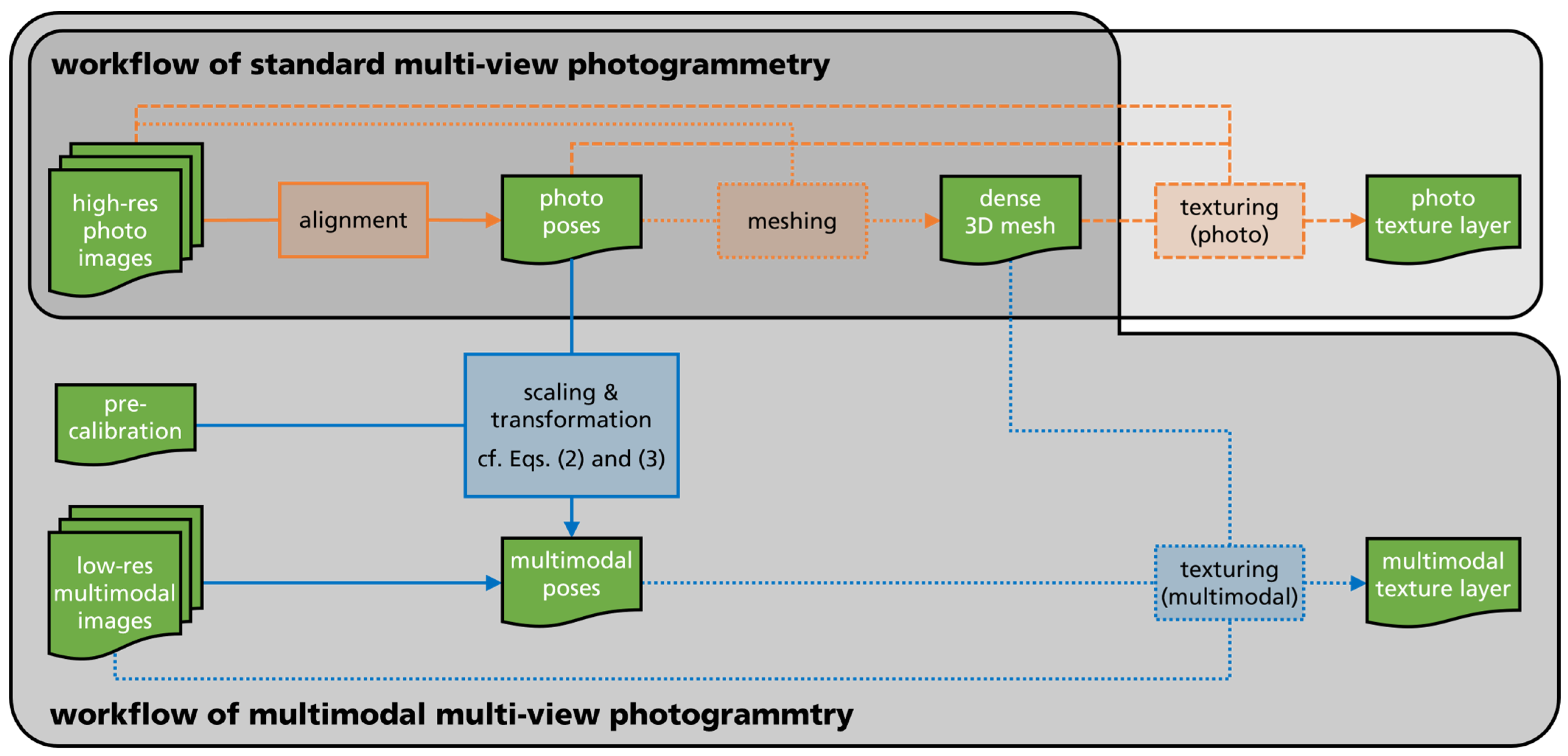
2.1. Multimodal Multi-View Photogrammetry
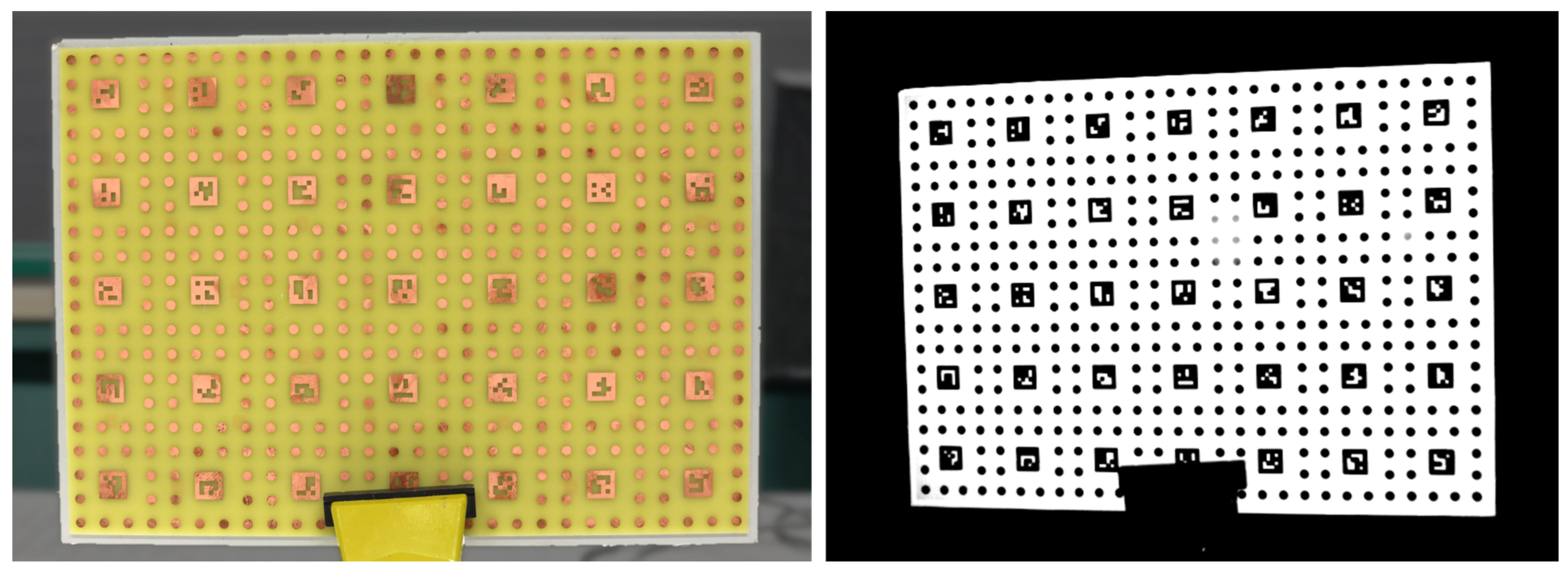
2.2. Laboratory Setup
2.3. Pre-Calibration
- Capture a set of (stereo) images of the specimen in varying orientations;
- Extract the pixel coordinates of each visible unique feature in each image;
- Optimize the extrinsic and intrinsic camera parameters by bundle block adjustment;
- Perform metric scaling of the external orientations using the known pitch distance of the circles.
2.4. Implementation of the Multimodal MVP Workflow
3. Results
3.1. Experiments Applying Multimodal MVP
3.2. Comparison of Multimodal MVP against Standard MVP
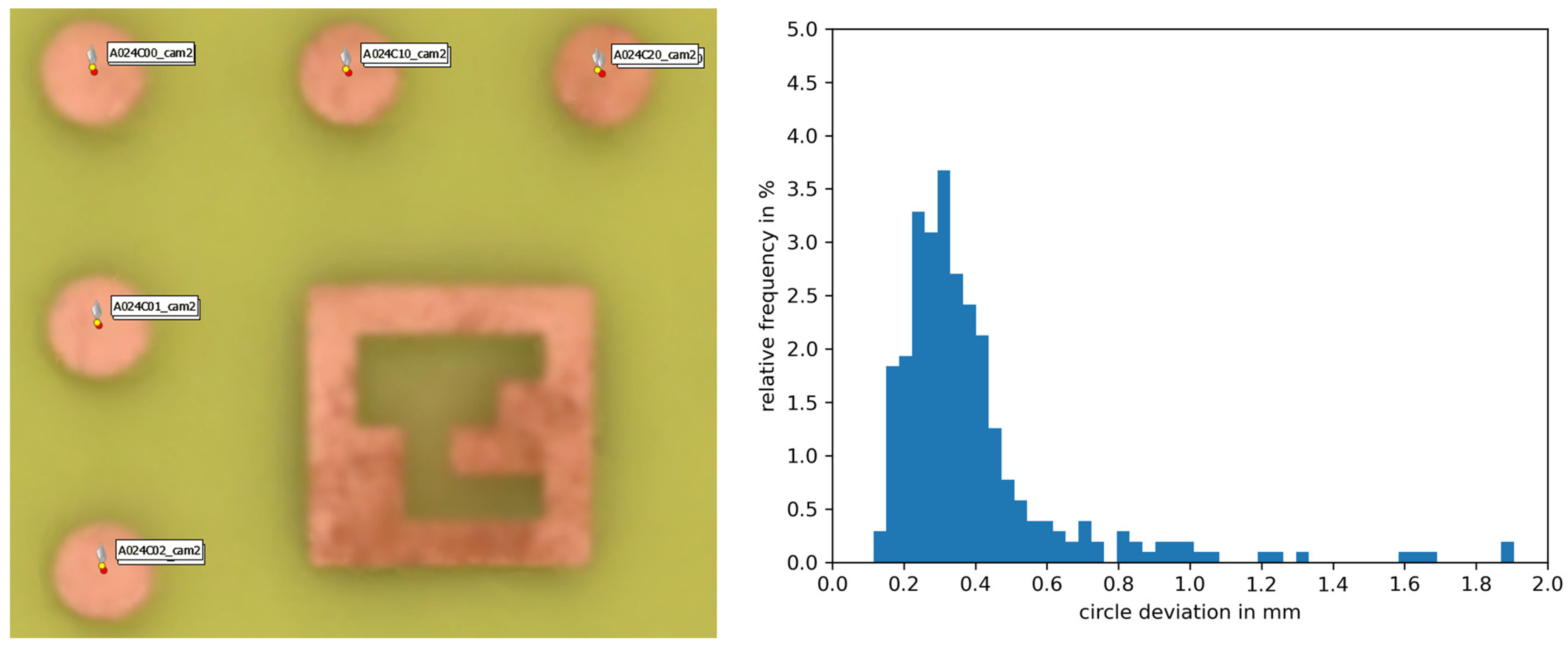
3.3. Accuracy of Multimodal MVP
4. Discussion and Conclusions
5. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Coffey, V.C. Multispectral Imaging Moves into the Mainstream. Opt. Photonics News 2012, 23, 18–24. [Google Scholar] [CrossRef]
- Vozel, B.; Lukin, V.; Bazi, Y. Editorial to “Multispectral Image Acquisition, Processing and Analysis”. Remote Sens. 2019, 11, 2310. [Google Scholar] [CrossRef]
- Manickavasagan, A.; Jayasuriya, H. Imaging with Electromagnetic Spectrum: Applications in Food and Agriculture; Springer: Berlin/Heidelberg, Germany, 2014; ISBN 978-3-642-54888-8. [Google Scholar] [CrossRef]
- Kwan, C. Methods and Challenges Using Multispectral and Hyperspectral Images for Practical Change Detection Applications. Information 2019, 10, 353. [Google Scholar] [CrossRef]
- Yang, C.; Liu, H.; Liao, S.; Wang, S. Pedestrian Detection in Thermal Infrared Image Using Extreme Learning Machine. In Proceedings of ELM-2014 Volume 2; Proceedings in Adaptation, Learning and Optimization; Cao, J., Mao, K., Cambria, E., Man, Z., Toh, K.A., Eds.; Springer: Cham, Switzerland, 2015; Volume 4. [Google Scholar] [CrossRef]
- Brooke, C. Thermal Imaging for the Archaeological Investigation of Historic Buildings. Remote Sens. 2018, 10, 1401. [Google Scholar] [CrossRef]
- Pereira, C.B.; Yu, X.; Czaplik, M.; Rossaint, R.; Blazek, V.; Leonhardt, S. Remote monitoring of breathing dynamics using infrared thermography. Biomed. Opt. Express 2015, 6, 4378–4394. [Google Scholar] [CrossRef] [PubMed]
- Østergaard, J. UV imaging in pharmaceutical analysis. J. Pharm. Biomed. Anal. 2018, 147, 140–148. [Google Scholar] [CrossRef] [PubMed]
- Oliver, W.R.; Leone, L. Digital UV/IR photography for tattoo evaluation in mummified remains. J. Forensic Sci. 2012, 57, 1134–1136. [Google Scholar] [CrossRef] [PubMed]
- Patel, K.K.; Kar, A.; Khan, M.A. Potential of reflected UV imaging technique for detection of defects on the surface area of mango. J. Food Sci. Technol. 2019, 56, 1295–1301. [Google Scholar] [CrossRef] [PubMed]
- He, C.; He, H.; Chang, J.; Chen, B.; Ma, H.; Booth, M.J. Polarisation optics for biomedical and clinical applications: A review. Light. Sci. Appl. 2021, 10, 194. [Google Scholar] [CrossRef] [PubMed]
- Andreou, A.G.; Kalayjian, Z.K. Polarization imaging: Principles and integrated polarimeters. IEEE Sens. J. 2002, 2, 566–576. [Google Scholar] [CrossRef]
- Rosenberger, M.; Horn, R.; Golomoz, A.; Dittrich, P.-G.; Illmann, R.; Fütterer, R.; Notni, G. Investigation on surface inspection using polarizing image sensors. In Proceedings of the SPIE 12091, Image Sensing Technologies: Materials, Devices, Systems, and Applications IX, 120910F, Orlando, FL, USA, 30 May 2022. [Google Scholar] [CrossRef]
- Trefan, L.; Harris, C.; Evans, S.; Nuttall, D.; Maguire, S.; Kemp, A.M. A comparison of four different imaging modalities—Conventional, cross polarized, infra-red and ultra-violet in the assessment of childhood bruising. J. Forensic Leg. Med. 2018, 59, 30–35. [Google Scholar] [CrossRef] [PubMed]
- Pronti, L.; Romani, M.; Verona-Rinati, G.; Tarquini, O.; Colao, F.; Colapietro, M.; Pifferi, A.; Cestelli-Guidi, M.; Marinelli, M. Post-Processing of VIS, NIR, and SWIR Multispectral Images of Paintings. New Discovery on the The Drunkenness of Noah, Painted by Andrea Sacchi, Stored at Palazzo Chigi (Ariccia, Rome). Heritage 2019, 2, 2275–2286. [Google Scholar] [CrossRef]
- Huang, K.; Shi, B.; Li, X.; Li, X.; Huang, S.; Li, Y. Multi-modal Sensor Fusion for Auto Driving Perception: A Survey. arXiv 2022, arXiv:2202.02703. [Google Scholar]
- ElMasry, G.; Mandour, N.; Al-Rejaie, S.; Belin, E.; Rousseau, D. Recent Applications of Multispectral Imaging in Seed Phenotyping and Quality Monitoring—An Overview. Sensors 2019, 19, 1090. [Google Scholar] [CrossRef] [PubMed]
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J.J. Hyperspectral Imaging: A Review on UAV-Based Sensors, Data Processing and Applications for Agriculture and Forestry. Remote Sens. 2017, 9, 1110. [Google Scholar] [CrossRef]
- Aggarwal, S.L.P.; Papay, F.A. Applications of multispectral and hyperspectral imaging in dermatology. Exp. Dermatol. 2022, 31, 1128–1135. [Google Scholar] [CrossRef] [PubMed]
- Cadd, S.; Li, B.; Beveridge, P.; O’Hare, W.T.; Islam, M. Age Determination of Blood-Stained Fingerprints Using Visible Wavelength Reflectance Hyperspectral Imaging. J. Imaging 2018, 4, 141. [Google Scholar] [CrossRef]
- Kottner, S.; Schulz, M.M.; Berger, F.; Thali, M.J.; Gascho, D. Multispectral 3D Whole-Body Imaging of Dressed and Undressed Bodies in Combination with Post-Mortem X-Ray Computed Tomography. In Proceeding of the 3DBODY.TECH 2021—12th International Conference and Exhibition on 3D Body Scanning and Processing Technologies, Lugano, Switzerland, 19–20 October 2021. [Google Scholar] [CrossRef]
- Kottner, S.; Schulz, M.M.; Berger, F.; Thali, M.; Gascho, D. Beyond the visible spectrum—Applying 3D multispectral full-body imaging to the VirtoScan system. Forensic Sci. Med. Pathol. 2021, 17, 565–576. [Google Scholar] [CrossRef] [PubMed]
- Chane, C.S.; Mansouri, A.; Franck, M.S.; Frank, B. Integration of 3D and multispectral data for cultural heritage applications: Survey and perspectives. Image Vis. Comput. 2013, 31, 91–102. [Google Scholar] [CrossRef]
- Mathys, A.; Jadinon, R.; Hallot, P. Exploiting 3D multispectral texture for a better feature identification for cultural heritage. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, IV-2/W6, 91–97. [Google Scholar] [CrossRef]
- Chane, C.S.; Schütze, R.; Boochs, F.; Marzani, F.S. Registration of 3D and Multispectral Data for the Study of Cultural Heritage Surfaces. Sensors 2013, 13, 1004–1020. [Google Scholar] [CrossRef] [PubMed]
- Jurado, J.M.; Ortega, L.; Cubillas, J.J.; Feito, F.R. Multispectral Mapping on 3D Models and Multi-Temporal Monitoring for Individual Characterization of Olive Trees. Remote Sens. 2020, 12, 1106. [Google Scholar] [CrossRef]
- Xie, P.; Du, R.; Ma, Z.; Cen, H. Generating 3D Multispectral Point Clouds of Plants with Fusion of Snapshot Spectral and RGB-D Images. Plant Phenomics 2023, 5, 0040. [Google Scholar] [CrossRef] [PubMed]
- Jurade, J.M.; López, A.; Pádua, L.; Sousa, J.J. Remote sensing image fusion on 3D scenarios: A review of applications for agriculture and forestry. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102856. [Google Scholar] [CrossRef]
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; O’Connor, J.; Rosette, J. Structure from Motion Photogrammetry in Forestry: A Review. Curr. For. Rep. 2019, 5, 155–168. [Google Scholar] [CrossRef]
- Zhang, C.; Rosenberger, M.; Notni, G. 3D multispectral imaging system for contamination detection. In Proceedings of the SPIE 11056, Optical Measurement Systems for Industrial Inspection XI, Munich, Germany, 21 June 2019. [Google Scholar] [CrossRef]
- Zhang, Y.; Müller, S.; Stephan, B.; Gross, H.-M.; Notni, G. Point Cloud Hand-Object Segmentation Using Multimodal Imaging with Thermal and Color Data for Safe Robotic Object Handover. Sensors 2021, 21, 5676. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Gebhart, I.; Kühmstedt, P.; Rosenberger, M.; Notni, G. Enhanced Contactless Vital Sign Estimation from Real-Time Multimodal 3D Image Data. J. Imaging 2020, 6, 123. [Google Scholar] [CrossRef] [PubMed]
- Svoboda, L.; Sperrhake, J.; Nisser, M.; Zhang, C.; Notni, G.; Proquitté, H. Contactless heart rate measurement in newborn infants using a multimodal 3D camera system. Front. Pediatr. 2022, 10, 897961. [Google Scholar] [CrossRef]
- Ross, W.; Waxman, A.; Streilein, W.; Aguiiar, M.; Verly, J.; Liu, F.; Braun, M.; Harmon, P.; Rak, S. Multi-sensor 3D image fusion and interactive search. In Proceedings of the Third International Conference on Information Fusion, Paris, France, 10–13 July 2000; Volume 1, pp. TUC3/10–TUC3/17. [Google Scholar] [CrossRef]
- Kim, J.; Yu, S.; Kim, I.-J.; Lee, S. 3D Multi-Spectrum Sensor System with Face Recognition. Sensors 2013, 13, 12804–12829. [Google Scholar] [CrossRef] [PubMed]
- Borghys, D.C.; Idrissa, M.; Shimoni, M.; Friman, O.; Axelsson, M.; Lundberg, M.; Perneel, C. Fusion of multispectral and stereo information for unsupervised target detection in VHR airborne data. In Proceedings of the SPIE 8745, Signal Processing, Sensor Fusion, and Target Recognition XXII, 874514, Baltimore, MD, USA, 23 May 2013. [Google Scholar] [CrossRef]
- Shen, X.; Xu, L.; Zhang, Q.; Jia, J. Multi-modal and Multi-spectral Registration for Natural Images. In Computer Vision—ECCV 2014; Lecture Notes in Computer Science; Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T., Eds.; Springer: Cham, Switzerland, 2014; Volume 8692. [Google Scholar] [CrossRef]
- Zhang, X.; Leng, C.; Hong, Y.; Pei, Z.; Cheng, I.; Basu, A. Multimodal Remote Sensing Image Registration Methods and Advancements: A Survey. Remote Sens. 2021, 13, 5128. [Google Scholar] [CrossRef]
- Yokoya, N.; Grohnfeldt, C.; Chanussot, J. Hyperspectral and Multispectral Data Fusion: A comparative review of the recent literature. IEEE Geosci. Remote Sens. Mag. 2017, 5, 29–56. [Google Scholar] [CrossRef]
- Petrich, J.; Snow, Z.; Corbin, D.; Reutzel, E.W. Multi-modal sensor fusion with machine learning for data-driven process monitoring for additive manufacturing. Addit. Manuf. 2021, 48, 102364. [Google Scholar] [CrossRef]
- Szeliski, R. (Ed.) Structure-from-Motion. In Computer Vision Algorithms and Applications; Springer: London, UK, 2011; pp. 303–334. [Google Scholar] [CrossRef]
- Luhmann, T.; Robson, S.; Kyle, S.; Boehm, J. (Eds.) Structure-from-Motion. In Close-Range photogrammetry and 3D Imaging, 3rd ed.; De Gruyter: Berlin, Germany; Boston, MA, USA, 2020; pp. 509–511. [Google Scholar] [CrossRef]
- Carrivick, J.L.; Smith, M.W.; Quincey, D.J. (Eds.) Introduction to Structure from Motion in the Geosciences. In Structure from Motion in the Geosciences; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Singh, G. (Ed.) CultLab3D: Digitizing Cultural Heritage. In IEEE Computer Graphics and Applications; IEEE: New York, NY, USA, 2014; Volume 34, Issue 3, pp. 4–5. [Google Scholar] [CrossRef]
- Edelman, G.J.; Aalders, M.C. Photogrammetry using visible, infrared, hyperspectral and thermal imaging of crime scenes. Forensic Sci. Int. 2018, 292, 181–189. [Google Scholar] [CrossRef] [PubMed]
- Zia, A.; Liang, J.; Zhou, J.; Gao, Y. 3D Reconstruction from Hyperspectral Images. In Proceedings of the 2015 IEEE Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 5–9 January 2015; pp. 318–325. [Google Scholar] [CrossRef]
- Adamopoulos, E.; Volinia, M.; Girotto, M.; Rinaudo, F. Three-Dimensional Thermal Mapping from IRT Images for Rapid Architectural Heritage NDT. Buildings 2020, 10, 187. [Google Scholar] [CrossRef]
- Chromy, A.; Klima, O. A 3D Scan Model and Thermal Image Data Fusion Algorithms for 3D Thermography in Medicine. J. Healthc. Eng. 2017, 2017, 5134021. [Google Scholar] [CrossRef]
- Javadnejad, F.; Gillins, D.T.; Parrish, C.E.; Slocum, R.K. A photogrammetric approach to fusing natural colour and thermal infrared UAS imagery in 3D point cloud generation. Int. J. Remote Sens. 2020, 41, 211–237. [Google Scholar] [CrossRef]
- Dlesk, A.; Vach, K.; Pavelka, K. Photogrammetric Co-Processing of Thermal Infrared Images and RGB Images. Sensors 2022, 22, 1655. [Google Scholar] [CrossRef] [PubMed]
- Brauers, J.; Schulte, N.; Aach, T. Multispectral Filter-Wheel Cameras: Geometric Distortion Model and Compensation Algorithms. IEEE Trans. Image Process. 2008, 17, 2368–2380. [Google Scholar] [CrossRef] [PubMed]
- Preißler, M.; Rosenberger, M.; Correns, M.; Schellhorn, M.; Linß, G. Investigation on a modular high speed multispectral camera. In Proceedings of the 20th IMEKO TC2 Symposium on Photonics in Measurement, Linz, Austria, 16–18 May 2011; pp. 59–62, ISBN 978-3-8440-0058-0. [Google Scholar]
- Stech, A.; Hudec, R.; Kamencay, P.; Polak, L.; Kufa, J. A Novel Method for 3D Photogrammetry Modeling using Different Wavelengths. In Proceedings of the 2023 33rd International Conference Radioelektronika (RADIOELEKTRONIKA), Pardubice, Czech Republic, 19–20 April 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Lu, H.; Fan, T.; Ghimire, P.; Deng, L. Experimental Evaluation and Consistency Comparison of UAV Multispectral Minisensors. Remote Sens. 2020, 12, 2542. [Google Scholar] [CrossRef]
- Stroppiana, D.; Pepe, M.; Boschetti, M.; Crema, A.; Candiani, G.; Giordan, D.; Baldo, M.; Allasia, P.; Monopoli, L. Estimatin crop density from multi-spectral UAV imagery in maize crop. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2019, XLII-2/W13, 619–624. [Google Scholar] [CrossRef]
- Daponte, P.; de Vito, L.; Glielmo, L.; Iannelli, L.; Liuzza, D.; Picariello, F.; Silano, G. A review on the use of drones for precision agriculture. In 2019 IOP Conference Series: Earth and Environmental Science, Proceedings of the 1st Workshop on Metrology for Agriculture and Forestry (METROAGRIFOR), Ancona, Italy, 1–2 October 2018; IOP Publishing Ltd.: Bristol, UK, 2019; Volume 275, p. 012022. [Google Scholar] [CrossRef]
- Heist, S.; Zhang, C.; Reichwald, K.; Kühmstedt, P.; Notni, G.; Tünnermann, A. 5D hyperspectral imaging: Fast and accurate measurement of surface shape and spectral characteristics using structured light. Opt. Express 2018, 26, 23366–23379. [Google Scholar] [CrossRef]
- Zhang, C.; Rosenberger, M.; Breitbarth, A.; Notni, G. A novel 3D multispectral vision system based on filter wheel cameras. In Proceedings of the 2016 IEEE International Conference on Imaging Systems and Techniques (IST), Chania, Greece, 4–6 October 2016; pp. 267–272. [Google Scholar] [CrossRef]
- Rosenberger, M.; Zhang, C.; Zhang, Y.; Notni, G. 3D high-resolution multimodal imaging system for real-time applications. In Proceedings of the SPIE 11397, Dimensional Optical Metrology and Inspection for Practical Applications IX, Munich, Germany, 21 April 2020. [Google Scholar] [CrossRef]
- Landmann, M.; Heist, S.; Dietrich, P.; Lutzke, P.; Gebhart, I.; Templin, J.; Kühmstedt, P.; Tünnermann, A.; Notni, G. High-speed 3D thermography. Opt. Lasers Eng. 2019, 121, 448–455. [Google Scholar] [CrossRef]
- Oppliger, M.; Gutknecht, J.; Gubler, R.; Ludwig, M.; Loeliger, T. Sensor Fusion of 3D Time-of-Flight and Thermal Infrared Camera for Presence Detection of Living Beings. In Proceedings of the IEEE Sensors 2022, Dallas, TX, USA, 30 October–2 November 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Li, X.; Liu, Z.; Cai, Y.; Pan, C.; Song, J.; Wang, J.; Shao, X. Polarization 3D imaging technology: A review. Front. Phys. 2023, 11, 1198457. [Google Scholar] [CrossRef]
- Wu, X.; Li, P.; Zhang, X.; Chen, J.; Huang, F. Three Dimensional Shape Reconstruction via Polarization Imaging and Deep Learning. Sensors 2023, 23, 4592. [Google Scholar] [CrossRef]
- Mortazavi, F.S.; Saadatseresht, M. High resolution surface reconstruction of cultural heritage objects using shape from polarization method. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2022; XLVIII-2/W2-2022, 85–93. [Google Scholar] [CrossRef]
- Landmann, M.; Speck, H.; Dietrich, P.; Heist, S.; Kühmstedt, P.; Tünnermann, A.; Notni, G. High-resolution sequential thermal fringe projection technique for fast and accurate 3D shape measurement of transparent objects. Appl. Opt. 2021, 60, 2362–2371. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Brahm, A.; Breitbarth, A.; Rosenberger, M.; Notni, G. Single-frame three-dimensional imaging using spectral-coded patterns and multispectral snapshot cameras. Opt. Eng. 2018, 57, 123105. [Google Scholar] [CrossRef]
- Pawłowski, M.; Wróblewska, A.; Sysko-Romańczuk, S. Effective Techniques for Multimodal Data Fusion: A Comparative Analysis. Sensors 2023, 23, 2381. [Google Scholar] [CrossRef]
- Gmünder, S. Aufbau und Charakterisierung eines Streifenprojektionssystems für die 3D-Formvermessung im UV-Bereich. Master‘s Thesis, Ernst-Abbe-Hochschule Jena, Jena, Germany, 2020. [Google Scholar]
- Hubold, M.; Montag, E.; Berlich, R.; Brunner, R.; Brüning, R. Multi-aperture system approach for snapshot multispectral imaging applications. Opt. Express 2021, 29, 7361–7378. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- OCV. Available online: https://opencv.org/ (accessed on 12 October 2023).
- Kruck, E. BINGO: Ein Bündelprogramm zur Simultanausgleichung für Ingenieuranwendungen—Möglichkeiten und praktische Ergebnisse. In Proceedings of the ISPRS, Rio de Janeiro, Brazil, 17–29 June 1984; pp. 471–480. [Google Scholar]
- Ströbel, B.; Schmelzle, S.; Blüthgen, N.; Heethoff, M. An automated device for the digitization and 3D modelling of insects, combining extended-depth-of-field and all-side multi-view imaging. ZooKeys 2018, 759, 1–27. [Google Scholar] [CrossRef]
- Wilts, H.; Garcia, B.R.; Garlito, R.G.; Gómez, L.S.; Prieto, E.G. Artificial Intelligence in the Sorting of Municipal Waste as an Enabler of the Circular Economy. Resources 2021, 10, 28. [Google Scholar] [CrossRef]
- Weiser, M.; Erdmann, B.; Schenkl, S.; Muggenthaler, H.; Hubig, M.; Mall, G.; Zachow, S. Uncertainty in temperature-based determination of time of death. Heat Mass Transfer 2018, 54, 2815–2826. [Google Scholar] [CrossRef]
- Edelman, G.; van Leeuwen, T.G.; Aalders, M.C. Hyperspectral imaging for the age estimation of blood stains at the crime scene. Forensic Sci. Int. 2012, 223, 72–77. [Google Scholar] [CrossRef]
- Pharr, M.; Jakob, W.; Humphreys, G. Physically Based Rendering—From Theory to Implementation, 4th ed.; The MIT Press: Cambridge, MA, USA, 2023. [Google Scholar]
- Tominaga, S.; Kimachi, A. Polarization imaging for material classification. Opt. Eng. 2008, 47, 123201. [Google Scholar] [CrossRef]
- Yang, B.; Yan, C.; Zhang, J.; Zhang, H. Refractive index and surface roughness estimation using passive multispectral and multiangular polarimetric measurements. Opt. Commun. 2016, 381, 336–345. [Google Scholar] [CrossRef]
- Han, Y.; Salido-Monzú, D.; Wieser, A. Classification of material and surface roughness using polarimetric multispectral LiDAR. In Proceedings of the SPIE 12621, Multimodal Sensing and Artificial Intelligence: Technologies and Applications III, Munich, Germany, 9 August 2023. [Google Scholar] [CrossRef]
- Sun, Z.; Lindell, D.B.; Solgaard, O.; Wetzstein, G. SPADnet: Deep RGB-SPAD sensor fusion assisted by monocular depth estimation. Opt. Express 2020, 28, 14948–14962. [Google Scholar] [CrossRef]
- Salom, I.; Dimić, G.; Čelebić, V.; Spasenović, M.; Raičković, M.; Mihajlović, M.; Todorović, D. An Acoustic Camera for Use on UAVs. Sensors 2023, 23, 880. [Google Scholar] [CrossRef] [PubMed]
- Fangli, F.; Di, M.; Juan, W. An improved acoustic imaging algorithm combining object detection and beamforming for acoustic camera. JASA Express Lett. 2022, 2, 064802. [Google Scholar] [CrossRef]
- Bräuer-Burchardt, C.; Preißler, M.; Ramm, R.; Breitbarth, A.; Dittmann, J.; Munkelt, C.; Verhoek, M.; Kühmstedt, P.; Notni, G. Mobile 3D Sensor for Documenting Maintenance Processes of Large Complex Structures. In Proceedings of the 60th Ilmenau Scientific Colloquium, Ilmenau, Germany, 4–8 September 2023. [Google Scholar]
- Bräuer-Burchardt, C.; Kühmstedt, P.; Notni, G. Calibration of Stereo 3D Scanners with Minimal Number of Views Using Plane Targets and Vanishing Points. In Computer Analysis of Images and Patterns, CAIP 2015; Lecture Notes in Computer Science; Azzopardi, G., Petkov, N., Eds.; Springer: Cham, Switzerland, 2015; Volume 9257. [Google Scholar] [CrossRef]
- Monrroy Cano, A.; Lambert, J.; Edahiro, M.; Kato, S. Single-Shot Intrinsic Calibration for Autonomous Driving Applications. Sensors 2022, 22, 2067. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Photo Camera | Multispectral Camera | Thermal Camera | |
|---|---|---|---|
| camera type | Canon EOS 5D Mark IV | Baumer LXG-40MS | Optris PI640 |
| resolution | 6720 × 4480 pixel | 612 × 582 pixel per channel | 640 × 480 pixel |
| pixel size | 4.3 µm | 5.5 µm | 17 µm |
| range | 16-bit RGB | 8-bit | 0 °C–100 °C |
| lens type | Canon EF 50 mm F/1.2 L USM | micro-lens array | IR lens |
| focal length | 50 mm | 5 mm | 18.4 mm |
| exposure time | 20–200 ms | 40–120 ms | ~30 ms |
| distance to photo camera | – | ~90 mm | ~135 mm |
| angle to photo camera | – | ~2.3° | ~2.1° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramm, R.; de Dios Cruz, P.; Heist, S.; Kühmstedt, P.; Notni, G. Fusion of Multimodal Imaging and 3D Digitization Using Photogrammetry. Sensors 2024, 24, 2290. https://doi.org/10.3390/s24072290
Ramm R, de Dios Cruz P, Heist S, Kühmstedt P, Notni G. Fusion of Multimodal Imaging and 3D Digitization Using Photogrammetry. Sensors. 2024; 24(7):2290. https://doi.org/10.3390/s24072290
Chicago/Turabian StyleRamm, Roland, Pedro de Dios Cruz, Stefan Heist, Peter Kühmstedt, and Gunther Notni. 2024. "Fusion of Multimodal Imaging and 3D Digitization Using Photogrammetry" Sensors 24, no. 7: 2290. https://doi.org/10.3390/s24072290