

Position Checking-Based Sampling Approach Combined with Attraction Point Local Optimization for Safe Flight of UAVs

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
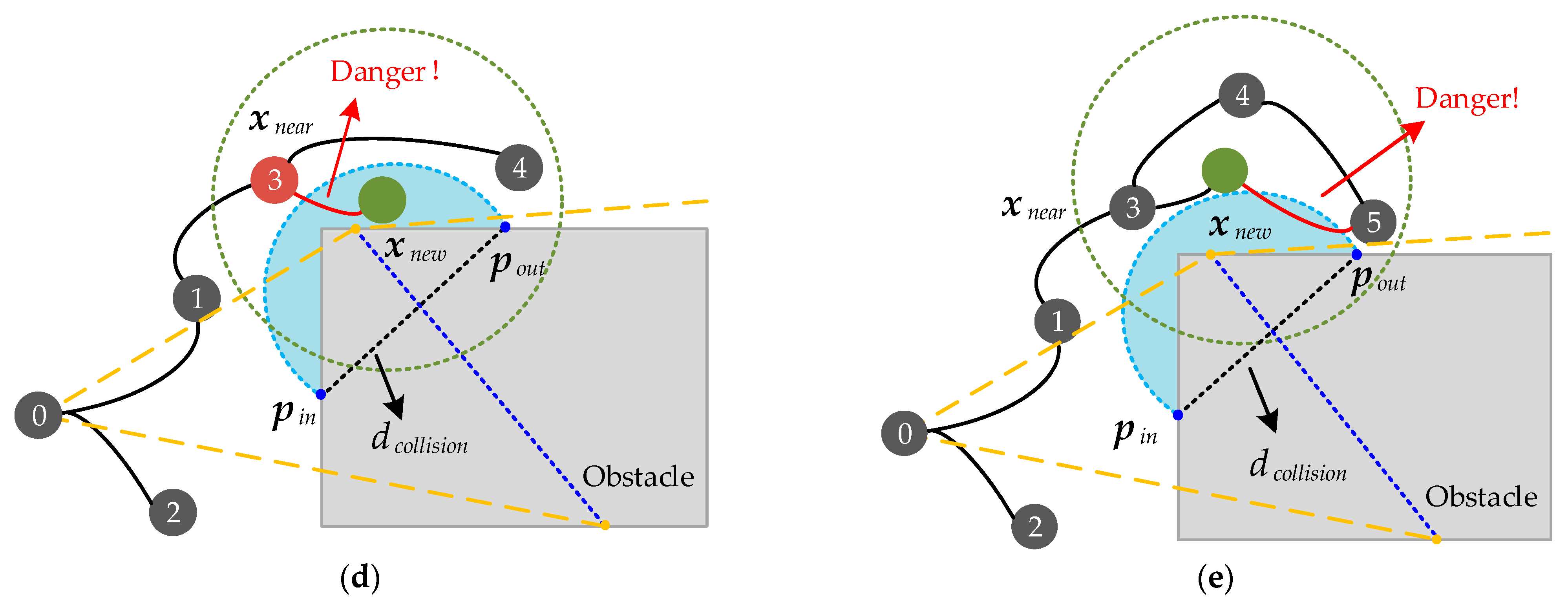
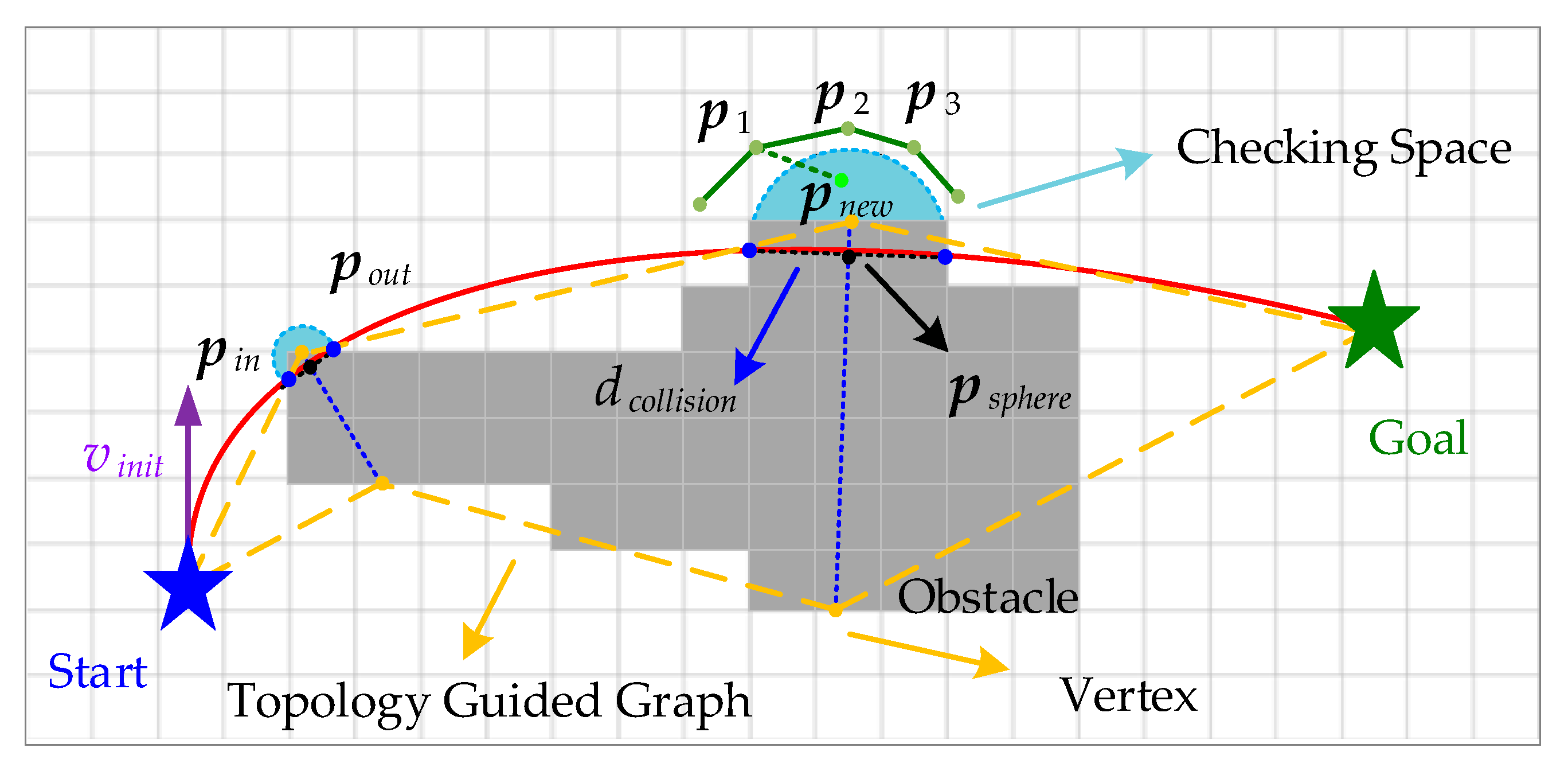
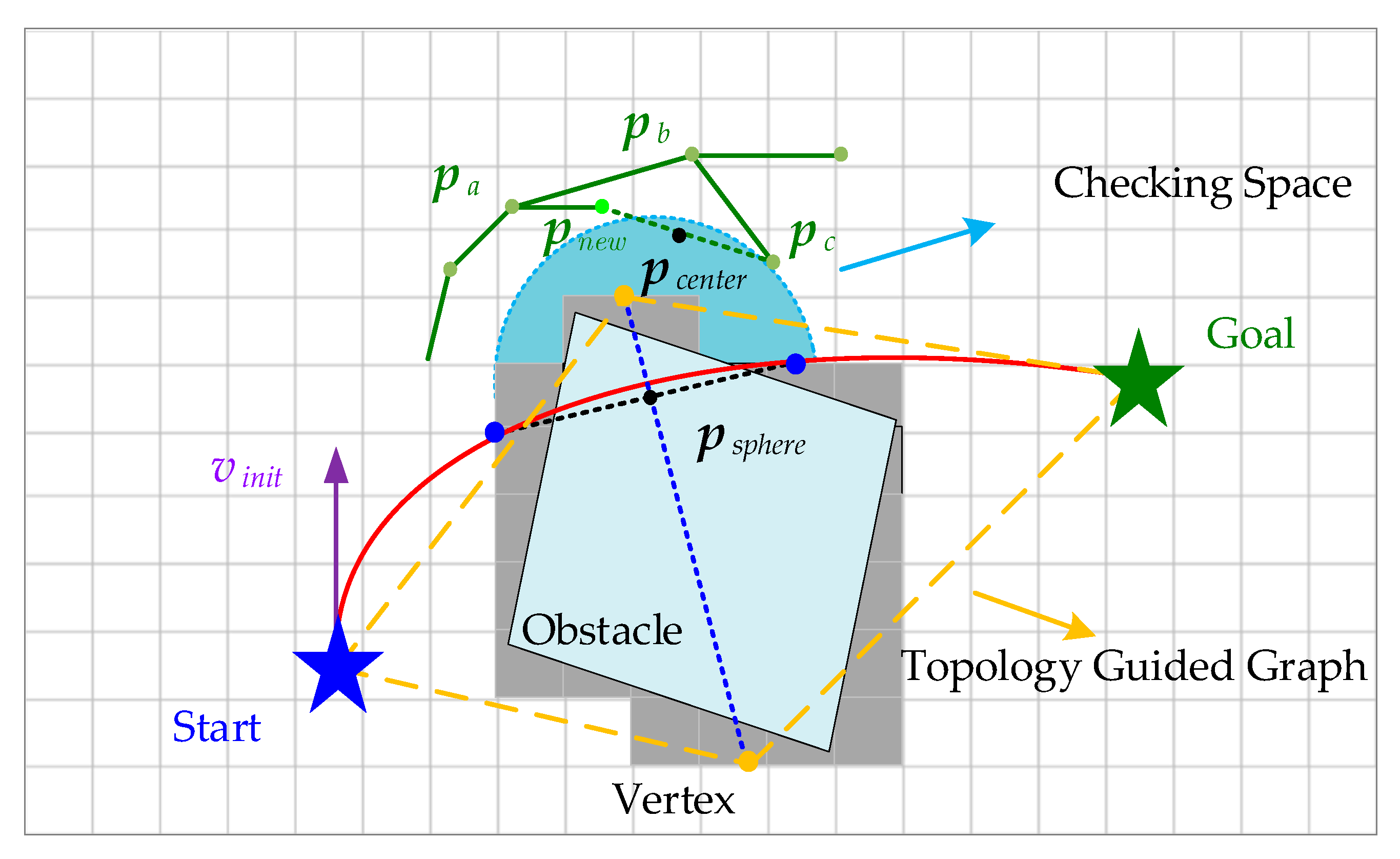
- With the topology construction of the environment, the initial trajectory connecting the start and end points does not take obstacles into account. A designed spherical space is formed by taking the lengths of the two points where the trajectory enters and leaves the obstacle as diameters, and the centers of the two points as spheres. In the node expansion process, a position-checking method that directly discards the sampled points in the designed sphere space is proposed.
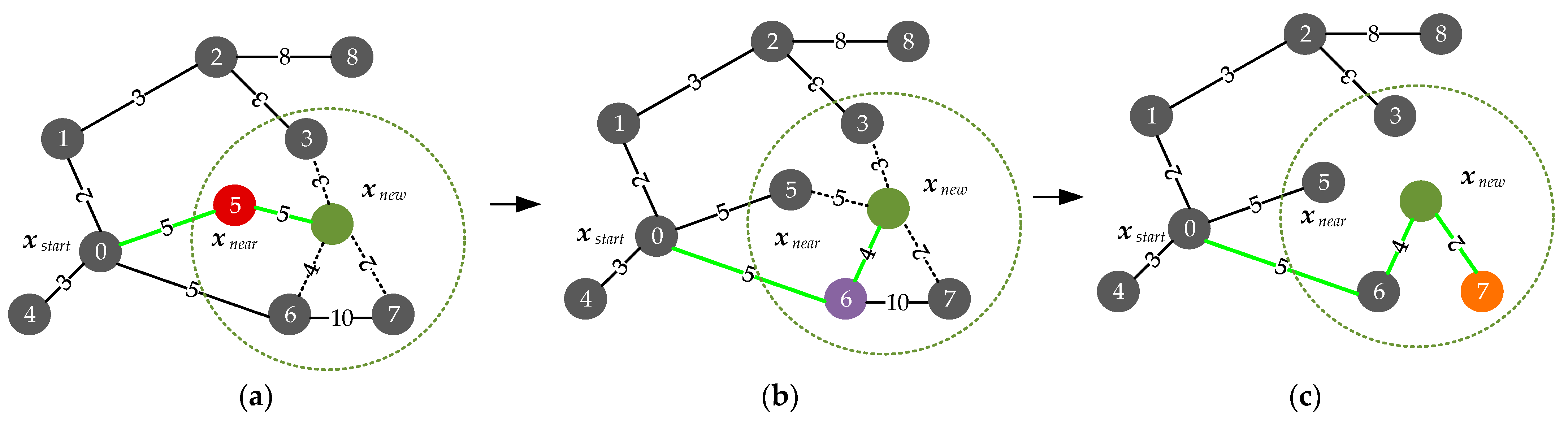
- In order to exploit the already available information, a reduction of unnecessary calculations in the rewiring process is proposed by judging whether the midpoint of line segment connecting the two points is in the sphere or not; if it is, this means that this branch does not need to be calculated.
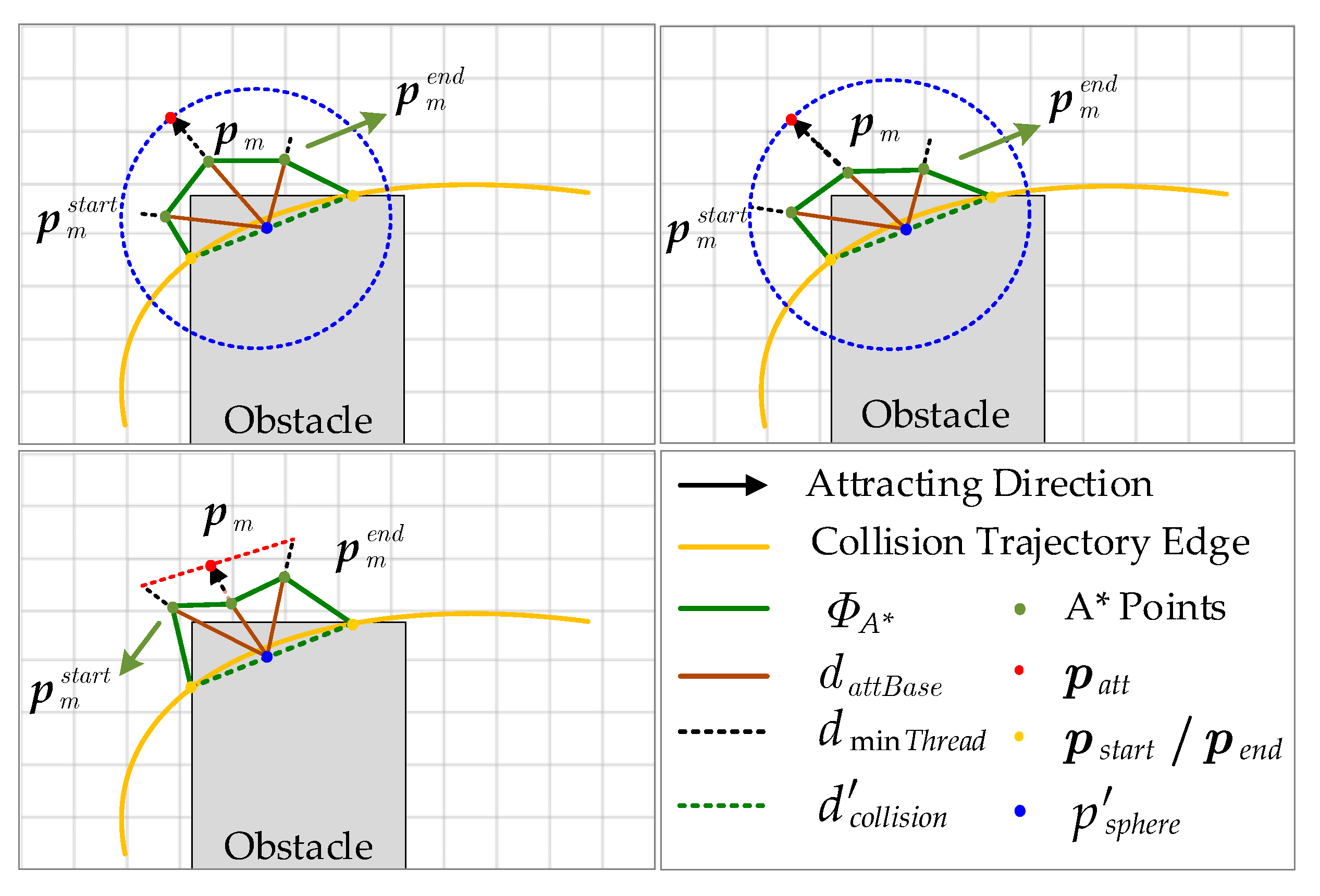
- Different attraction point generation strategies are designed according to the environment in the local optimization process, and then the gradient-based trajectory optimization is used to keep the trajectory away from the surface of obstacles, to ensure flight safety.
2. Related Work
2.1. Sampling-Based Planning
2.2. Kinodynamic Planning and Trajectory Optimization
3. Kinodynamic RRT* Planning Combined with Position Checking
3.1. Optimal State Transfer Cost
3.2. Kinodynamic RRT*
| Algorithm 1: Classical Kinodynamic RRT* | |
| 1: | Notation: Environment , Tree , Sampling State , , , Maximum Sampling Number |
| 2: | |
| 3: | for do |
| 4: | RandomlySample ; |
| 5: | FindNeighbor ; |
| 6: | if then |
| 7: | Expansion ; |
| 8: | TreeUpdate ; |
| 9: | if (getGoalRegional ) then |
| 10: | break; |
| 11: | end if |
| 12: | FindNeighbor ; |
| 13: | if then |
| 14: | Rewire ; |
| 15: | end if |
| 16: | end if |
| 17: | return |
| 18: | end for |
3.3. Node Tree Extension Optimization
3.4. Rewire Optimization
| Algorithm 2: Kinodynamic RRT* with Position Check | |
| 1: | Notation: Environment , Tree , Sampling State , , , Maximum Sampling Number , |
| 2: | |
| 3: | for do |
| 4: | RandomlySample ; |
| 5: | FindNeighbor ; |
| 6: | if then |
| 7: | if then |
| 8: | ComputValue (); |
| 9: | ComputVector (); |
| 10: | ComputValue (); |
| 11: | if then |
| 12: | continue; |
| 13: | end if |
| 14: | end if |
| 15: | Expansion ; |
| 16: | end if |
| 17: | TreeUpdate ; |
| 18: | if getGoalRegional then |
| 19: | break; |
| 20: | end if |
| 21: | FindNeighbor ; |
| 22: | while () do |
| 23: | if then |
| 24: | ComputVector (); |
| 25: | ComputValue (); |
| 26: | if then |
| 27: | Continue; |
| 28: | end if |
| 29: | end if |
| 30: | Rewire ; |
| 31: | end while |
| 32: | end for |
| 33: | return |
4. Local Trajectory Optimization
4.1. Optimization Problem Modeling
4.2. Local Optimization Strategy Adjustment
| Algorithm 3: Attraction Points Selected by Environment | |
| 1: | Notation: Environment , , , , , |
| 2: | while do |
| 3: | Search ; |
| 4: | GetMidpoint ; |
| 5: | DividePath ; |
| 6: | EachMidpoint ; |
| 7: | ; |
| 8: | ; |
| 9: | if then |
| 10: | GetMax ; |
| 11: | else then |
| 12: | GetIntersection ; |
| 13: | ; |
| 14: | if then |
| 15: | return ; |
| 16: | else then |
| 17: | break; |
| 18: | end if |
| 19: | end if |
| 20: | end while |
5. Simulation and Experiment Results
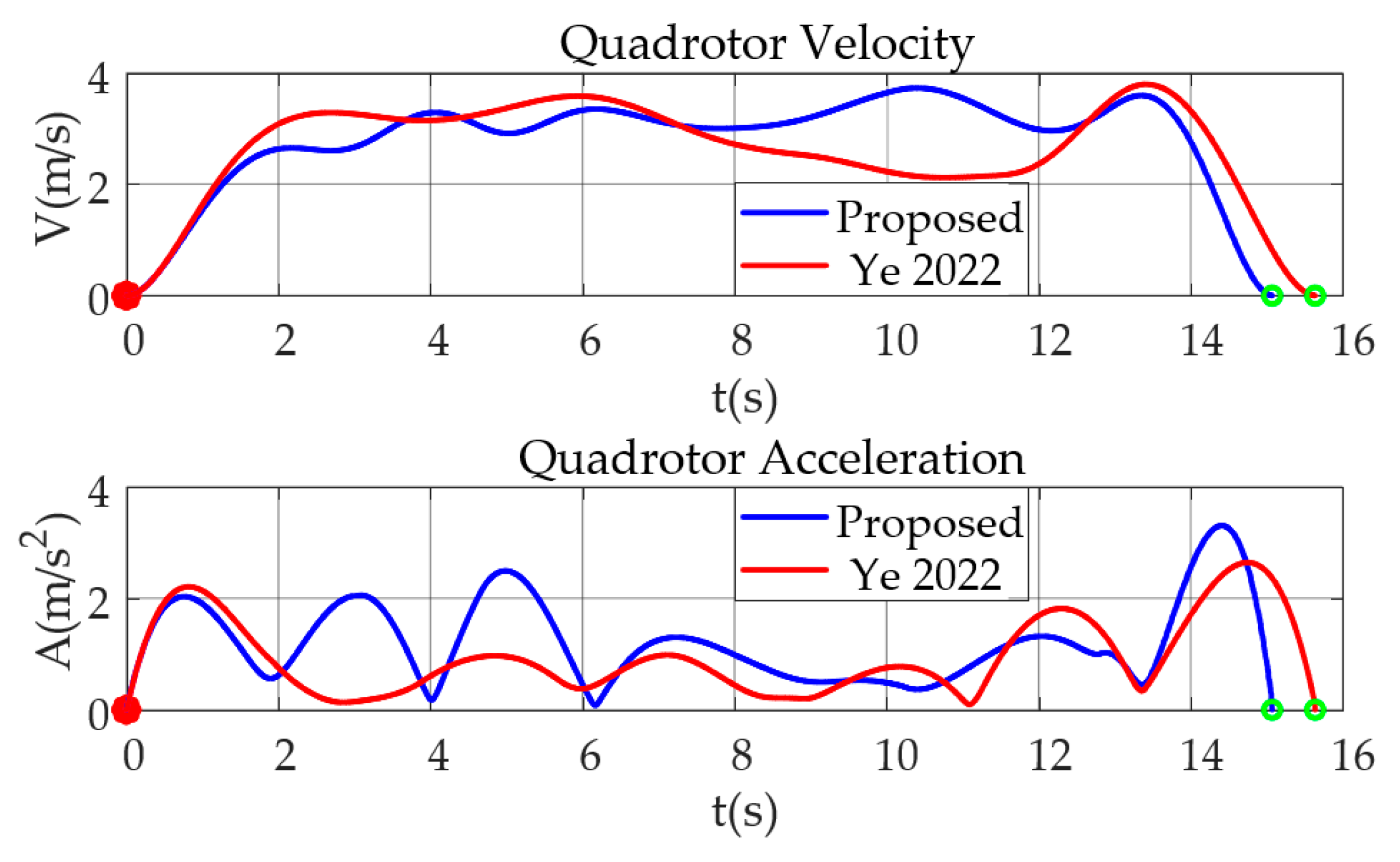
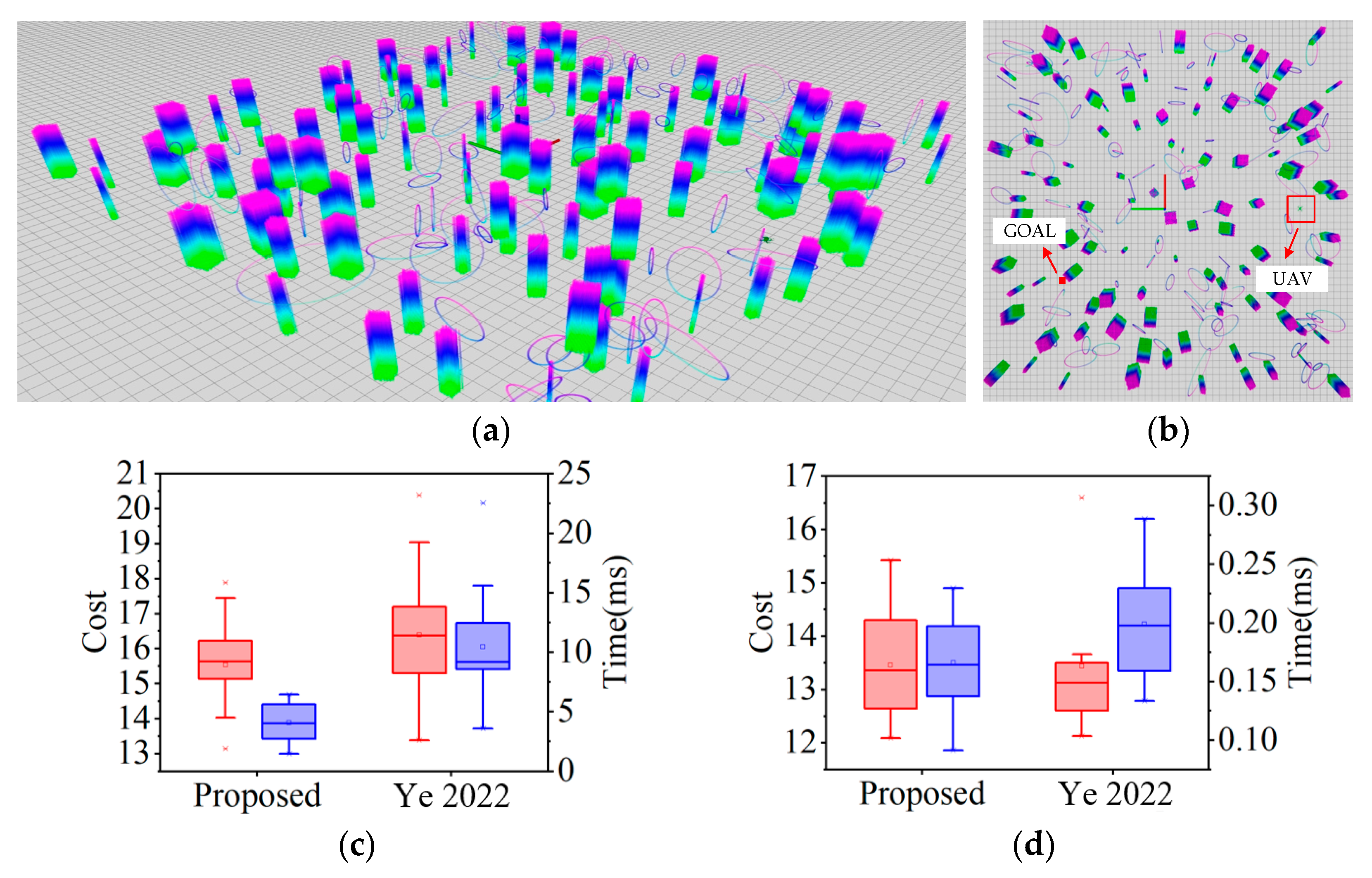
5.1. Simulation
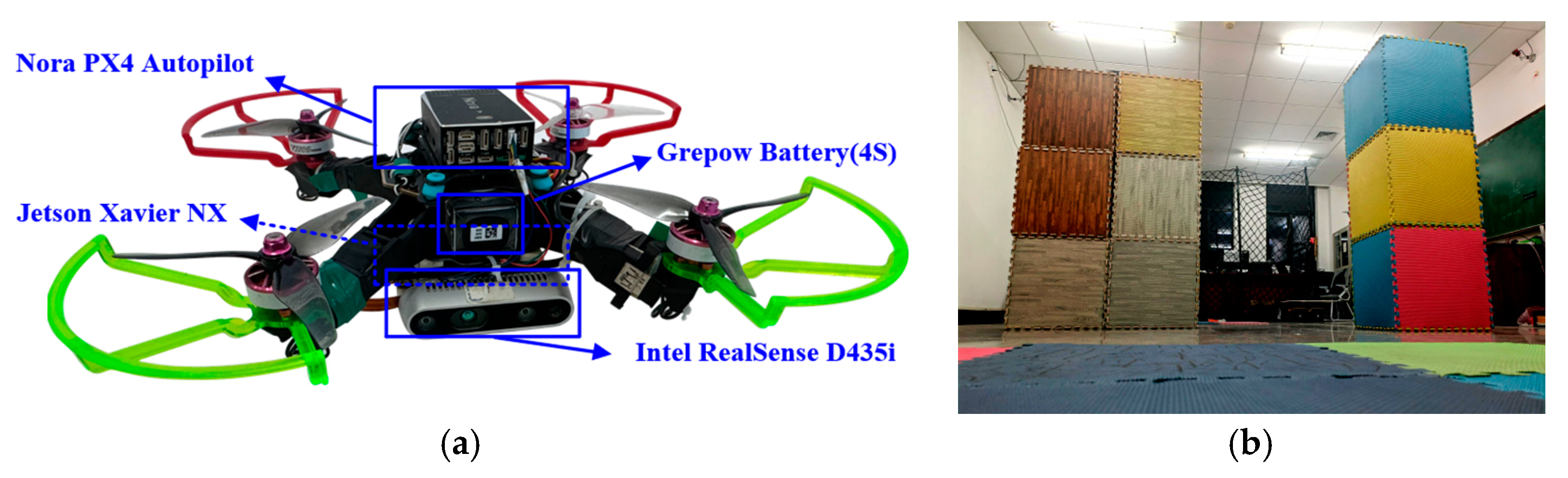
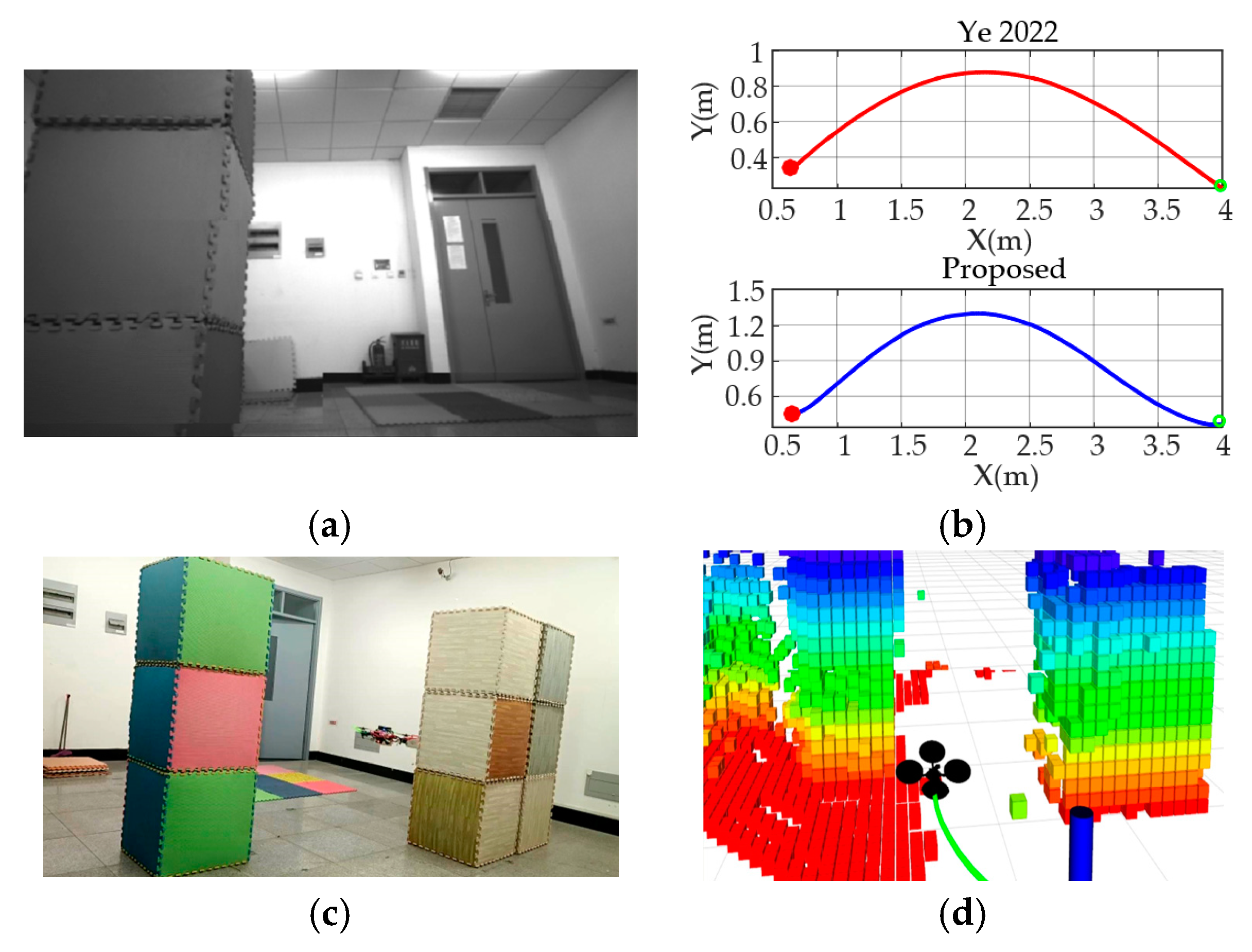
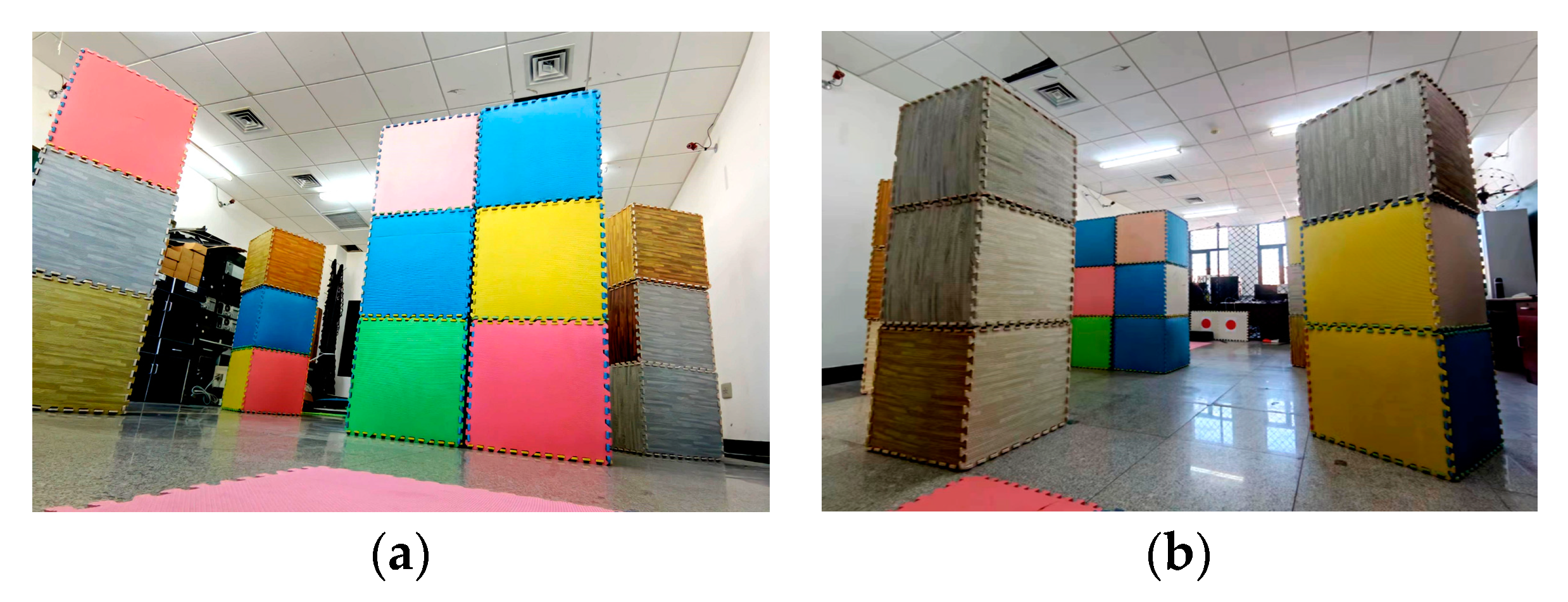
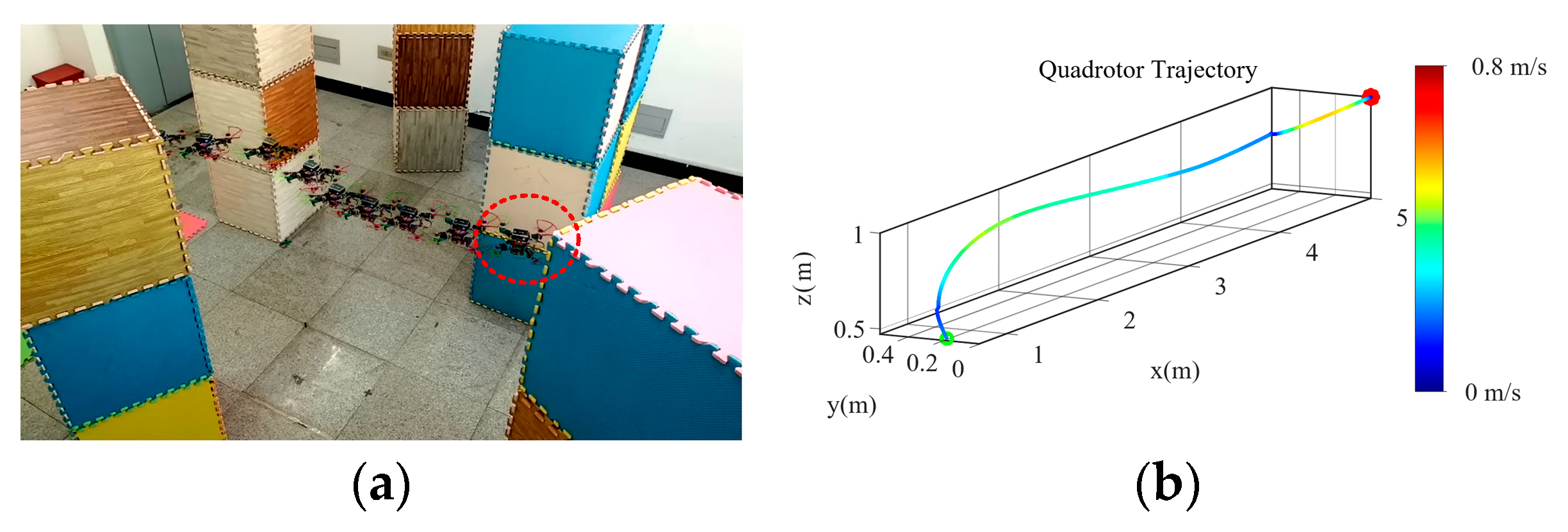
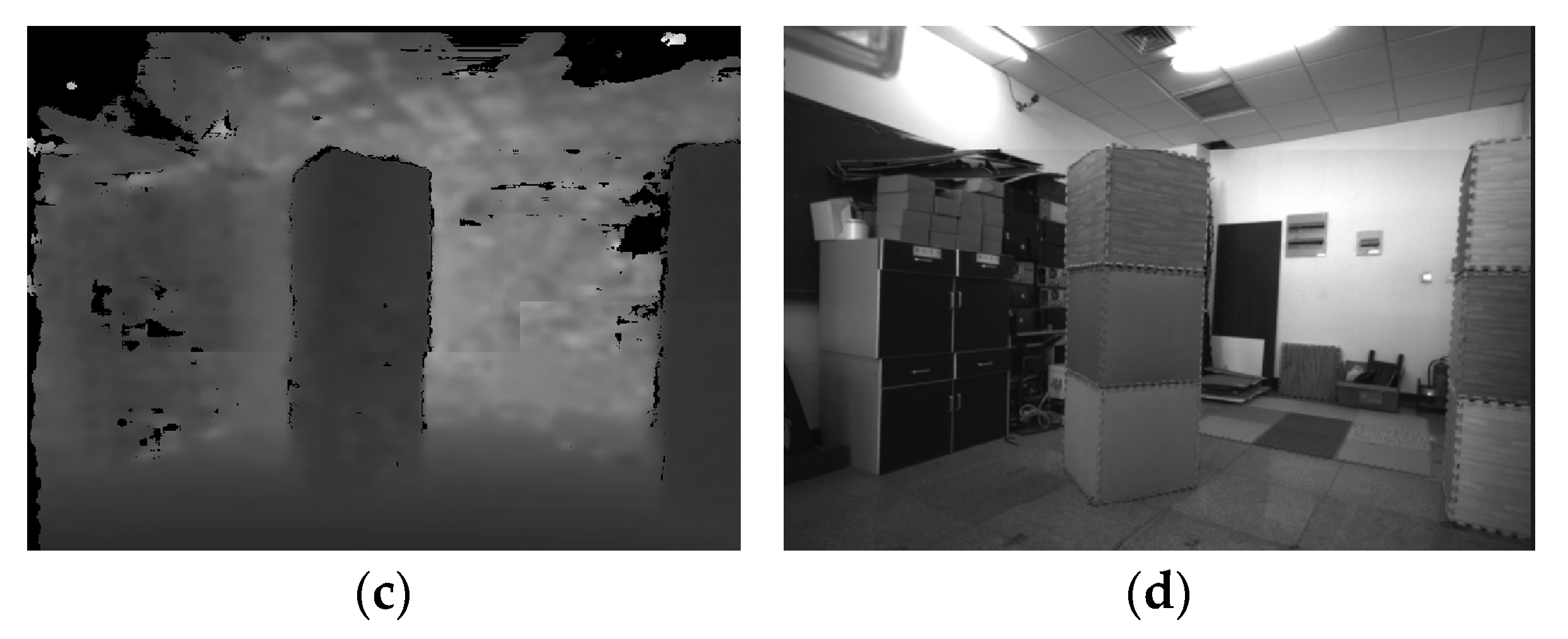
5.2. Real-World Experiment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Eldeeb, E.; de Souza Sant, J.M.; Pérez, D.E.; Shehab, M.; Mahmood, N.H.; Alves, H. Multi-UAV Path Learning for Age and Power Optimization in IoT with UAV Battery Recharge. IEEE Trans. Veh. Technol. 2023, 72, 5356–5360. [Google Scholar] [CrossRef]
- Guzzi, J.; Chavez-Garcia, R.O.; Nava, M.; Gambardella, L.M.; Giusti, A. Path Planning with Local Motion Estimations. IEEE Robot. Autom. Lett. 2020, 5, 2586–2593. [Google Scholar] [CrossRef]
- Wen, J.; Zhang, X.; Gao, H.; Yuan, J.; Fang, Y. E3MoP: Efficient Motion Planning Based on Heuristic-Guided Motion Primitives Pruning and Path Optimization with Sparse-Banded Structure. IEEE Trans. Autom. Sci. Eng. 2022, 19, 2762–2775. [Google Scholar] [CrossRef]
- Zhang, S.; Li, Y.; Ye, F.; Geng, X.; Zhou, Z.; Shi, T. A Hybrid Human-in-the-Loop Deep Reinforcement Learning Method for UAV Motion Planning for Long Trajectories with Unpredictable Obstacles. Drones 2023, 7, 311. [Google Scholar] [CrossRef]
- Hsieh, T.-L.; Jhan, Z.-S.; Yeh, N.-J.; Chen, C.-Y.; Chuang, C.-T. An Unmanned Aerial Vehicle Indoor Low-Computation Navigation Method Based on Vision and Deep Learning. Sensors 2024, 24, 190. [Google Scholar] [CrossRef] [PubMed]
- Mostafa, S.; Ramirez-Serrano, A. Three-Dimensional Flight Corridor: An Occupancy Checking Process for Unmanned Aerial Vehicle Motion Planning inside Confined Spaces. Robotics 2023, 12, 134. [Google Scholar] [CrossRef]
- Tordesillas, J.; Lopez, B.T.; Everett, M.; How, J.P. FASTER: Fast and Safe Trajectory Planner for Navigation in Unknown Environments. IEEE Trans. Robot. 2022, 38, 922–938. [Google Scholar] [CrossRef]
- Zhou, B.; Gao, F.; Wang, L.; Liu, C.; Shen, S. Robust and Efficient Quadrotor Trajectory Generation for Fast Autonomous Flight. IEEE Robot. Autom. Lett. 2019, 4, 3529–3536. [Google Scholar] [CrossRef]
- Ye, H.; Zhou, X.; Wang, Z.; Xu, C.; Chu, J.; Gao, F. TGK-Planner: An Efficient Topology Guided Kinodynamic Planner for Autonomous Quadrotors. IEEE Robot. Autom. Lett. 2021, 6, 494–501. [Google Scholar] [CrossRef]
- Ye, H.; Pan, N.; Wang, Q.; Xu, C.; Gao, F. Efficient Sampling-based Multirotors Kinodynamic Planning with Fast Regional Optimization and Post Refining. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 3356–3363. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N. Path Planning Techniques for Unmanned Aerial Vehicles: A Review, Solutions, and Challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Quan, L.; Han, L.; Zhou, B.; Shen, S.; Gao, F. Survey of UAV motion planning. IET Cyber Syst Robot. 2020, 2, 14–21. [Google Scholar] [CrossRef]
- Tang, G.; Liu, P.; Hou, Z.; Claramunt, C.; Zhou, P. Motion Planning of UAV for Port Inspection Based on Extended RRT* Algorithm. J. Mar. Sci. Eng. 2023, 11, 702. [Google Scholar] [CrossRef]
- Jang, K.; Baek, J.; Park, S.; Park, J. Motion Planning for Closed-Chain Constraints Based on Probabilistic Roadmap with Improved Connectivity. IEEE-ASME Trans. Mechatron. 2022, 27, 2035–2043. [Google Scholar] [CrossRef]
- Lathrop, P.; Boardman, B.; Martínez, S. Distributionally Safe Path Planning: Wasserstein Safe RRT. IEEE Robot. Autom. Lett. 2022, 7, 430–437. [Google Scholar] [CrossRef]
- Gammell, J.D.; Barfoot, T.D.; Srinivasa, S.S. Informed Sampling for Asymptotically Optimal Path Planning. IEEE Trans. Robot. 2018, 34, 966–984. [Google Scholar] [CrossRef]
- Arslan, O.; Tsiotras, P. Use of Relaxation Methods in Sampling-based Algorithms for Optimal Motion Planning. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 2421–2428. [Google Scholar] [CrossRef]
- Boeuf, A.; Cortés, J.; Alami, R.; Siméon, T. Enhancing Sampling-based Kinodynamic Motion Planning for Quadrotors. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 2447–2452. [Google Scholar] [CrossRef]
- Karaman, S.; Walter, M.R.; Perez, A.; Frazzoli, E.; Teller, S. Anytime Motion Planning using the RRT*. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 1478–1483. [Google Scholar] [CrossRef]
- Gao, F.; Lin, Y.; Shen, S. Gradient-based Online Safe Trajectory Generation for Quadrotor Flight in Complex Environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 3681–3688. [Google Scholar] [CrossRef]
- Wang, J.; Chi, W.; Li, C.; Wang, C.; Meng, M.Q.H. Neural RRT*: Learning-Based Optimal Path Planning. IEEE Trans. Autom. Sci. Eng. 2020, 17, 1748–1758. [Google Scholar] [CrossRef]
- Wang, J.; Jia, X.; Zhang, T.; Ma, N.; Meng, M.Q.H. Deep Neural Network Enhanced Sampling-Based Path Planning in 3D Space. IEEE Trans. Autom. Sci. Eng. 2022, 19, 3434–3443. [Google Scholar] [CrossRef]
- Liu, S.; Atanasov, N.; Mohta, K.; Kumar, V. Search-based Motion Planning for Quadrotors using Linear Quadratic Minimum Time Control. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 2872–2879. [Google Scholar] [CrossRef]
- Mellinger, D.; Kumar, V. Minimum Snap Trajectory Generation and Control for Quadrotors. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 2520–2525. [Google Scholar] [CrossRef]
- Richter, C.; Bry, A.; Roy, N. Polynomial Trajectory Planning for Aggressive Quadrotor Flight in Dense Indoor Environments. In Proceedings of the The International Symposium of Robotics Research (ISRR), Singapore, 16–19 December 2013; pp. 649–666. [Google Scholar] [CrossRef]
- Gao, F.; Wang, L.; Zhou, B.; Zhou, X.; Pan, J.; Shen, S. Teach-Repeat-Replan: A Complete and Robust System for Aggressive Flight in Complex Environments. IEEE Trans. Robot. 2020, 36, 1526–1545. [Google Scholar] [CrossRef]
- Zhou, B.; Gao, F.; Pan, J.; Shen, S. Robust Real-time UAV Replanning Using Guided Gradient-based Optimization and Topological Paths. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 1208–1214. [Google Scholar] [CrossRef]
- Zhou, B.; Pan, J.; Gao, F.; Shen, S. RAPTOR: Robust and Perception-Aware Trajectory Replanning for Quadrotor Fast Flight. IEEE Trans. Robot. 2021, 37, 1992–2009. [Google Scholar] [CrossRef]
- Zhou, X.; Wang, Z.; Ye, H.; Xu, C.; Gao, F. EGO-Planner: An ESDF-Free Gradient-Based Local Planner for Quadrotors. IEEE Robot. Autom. Lett. 2021, 6, 478–485. [Google Scholar] [CrossRef]
- Webb, D.J.; Berg, J.v.d. Kinodynamic RRT*: Asymptotically Optimal Motion Planning for Robots with Linear Dynamics. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 5054–5061. [Google Scholar] [CrossRef]
- Ding, W.; Gao, W.; Wang, K.; Shen, S. Trajectory Replanning for Quadrotors Using Kinodynamic Search and Elastic Optimization. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 7595–7602. [Google Scholar] [CrossRef]
- Gao, F.; Wu, W.; Pan, J.; Zhou, B.; Shen, S. Optimal Time Allocation for Quadrotor Trajectory Generation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4715–4722. [Google Scholar] [CrossRef]



















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, H.; Li, B.; Tong, R.; Yin, H.; Zhu, C. Position Checking-Based Sampling Approach Combined with Attraction Point Local Optimization for Safe Flight of UAVs. Sensors 2024, 24, 2157. https://doi.org/10.3390/s24072157
Zhu H, Li B, Tong R, Yin H, Zhu C. Position Checking-Based Sampling Approach Combined with Attraction Point Local Optimization for Safe Flight of UAVs. Sensors. 2024; 24(7):2157. https://doi.org/10.3390/s24072157
Chicago/Turabian StyleZhu, Hai, Baoquan Li, Ruiyang Tong, Haolin Yin, and Canlin Zhu. 2024. "Position Checking-Based Sampling Approach Combined with Attraction Point Local Optimization for Safe Flight of UAVs" Sensors 24, no. 7: 2157. https://doi.org/10.3390/s24072157