

Deep Learning-Based Prognostics and Health Management Model for Pilot-Operated Cryogenic Safety Valves

Abstract
:1. Introduction
2. Related Research
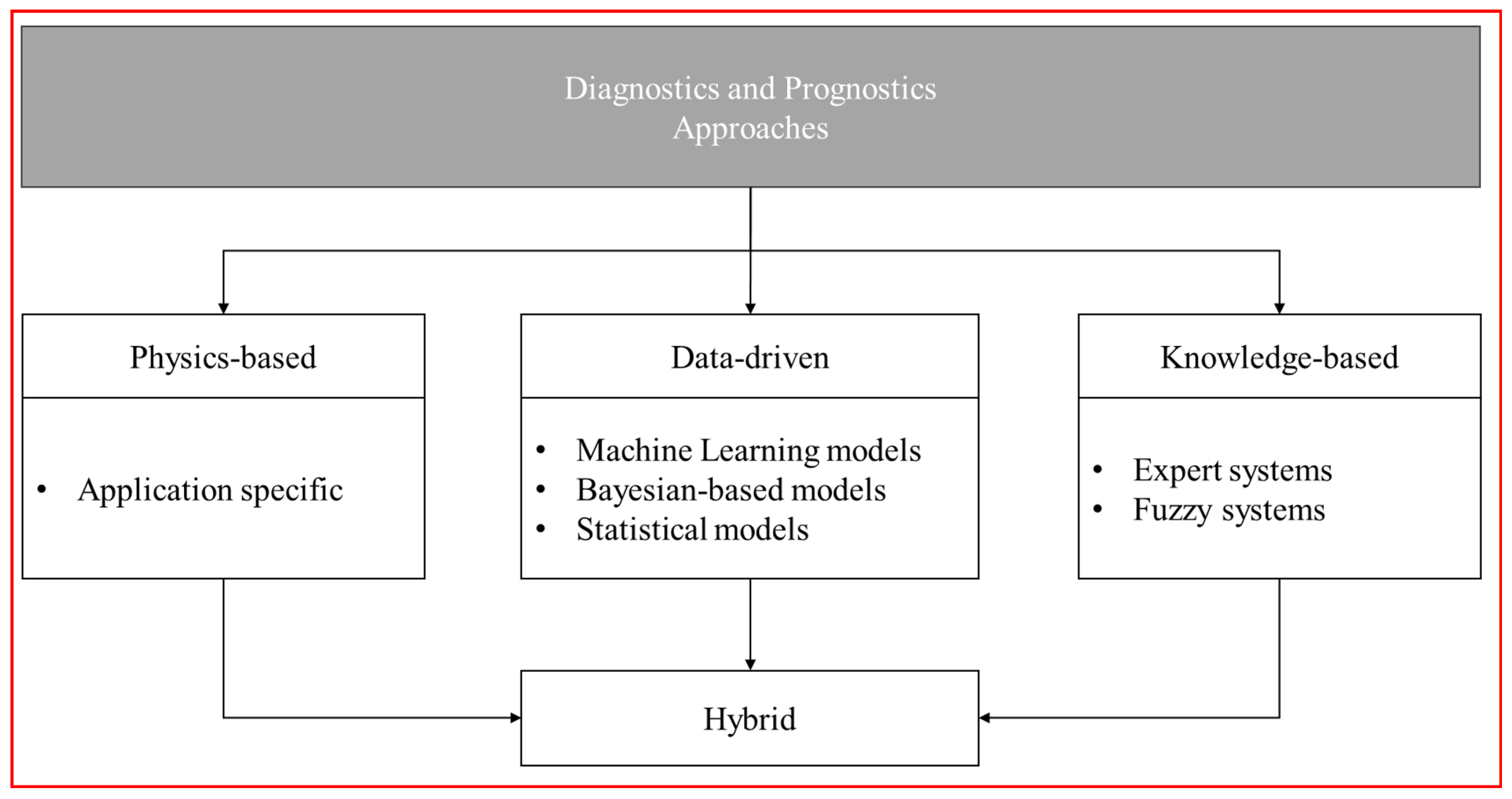
2.1. Traditional Approaches for Robustness Prediction and Management
- Physics-based approach: This approach is based on understanding the physical aspects of failure (e.g., fault growth or degradation) and is applicable when an accurate mathematical model for the target can be used [7]. It evaluates the residuals (errors) between actual performance measurements and predictions from the mathematical model to determine the presence of faults. Statistical techniques are used to evaluate residuals, assuming that significant residuals indicate malfunctions, while small residuals may result from noise or modeling errors [8]. Bayesian hypothesis testing and probabilistic RUL predictions are used to assess the superiority of the degradation model and evaluate errors/biases in measured data [9].
- Data-driven approach: In contrast to the physics-based approach, data-driven approaches do not always rely on reliable physical models, making them suitable when such models are unavailable. These approaches focus on learning mathematical models based on correlations and dependencies between the output variables of interest and available variables [10,11]. Data quantity and quality are crucial, and if sufficient data are available, this approach can be implemented without requiring a physical model [12].
- Knowledge-based approach: Knowledge-based models rely on comparing predefined failure libraries and observed situations to provide intuitive results based on engineering experience and historical events [13]. Constructing such models is a challenging task and mostly relies on the expertise of domain experts [14]. However, recent research has been exploring the integration of knowledge-based models with other approaches through hybrid approaches to add flexibility to the modeling process, especially in complex systems.
- Complexity of the system and physical model: Some complex systems may be challenging to construct accurate physical models for. Real system behavior is influenced by various physical factors and interactions, making it difficult to represent them accurately with mathematical models. Moreover, building a physical model often requires deep domain knowledge and extensive experimental data, which might be limited.
- Diversity and volume of data: Data-driven approaches can utilize diverse data collected from various sensors to model system behavior, reflecting interactions and influences that might be challenging to consider with a physics-based approach. Additionally, a large amount of data enables more sophisticated modeling and predictions. In the era of big data, the increase in data quantity and diversity makes data-driven approaches more important, as they can effectively analyze data to extract valuable information.
- Real-time prediction and adaptability: Some systems change rapidly and operate under different environments. In such cases, data-driven approaches are advantageous, as they can collect and analyze data in real time to update prediction models. Physical models may require repeated experiments and model reconstructions to apply changes due to system variations or external influences. However, data-driven approaches can continuously update and adapt models with new data, making them more suitable for real-time prediction and adaptability.
2.2. Trends in Data-Driven Fault Prediction Research
- RNN-based models: These models store past information in memory and update it with each new input, but models like LSTM have issues with slow calculation speed and difficulty in representing long-term dependencies between distant data points.
- Transformer-based models: Transformer-based models use self-attention mechanisms to replace RNN-based models, and models like the Transformer-Encoder have proposed efficient and effective methodologies to improve prediction performance. However, some Transformer-based models have significant drawbacks in size and computational complexity, leading to ongoing research to address these limitations [16,17,18].
3. Data Collection and Preprocessing through Testbed Construction
3.1. Testbed Construction for Data Collection
3.2. Data Collection for Normal and Abnormal States
4. Experiment and Evaluation
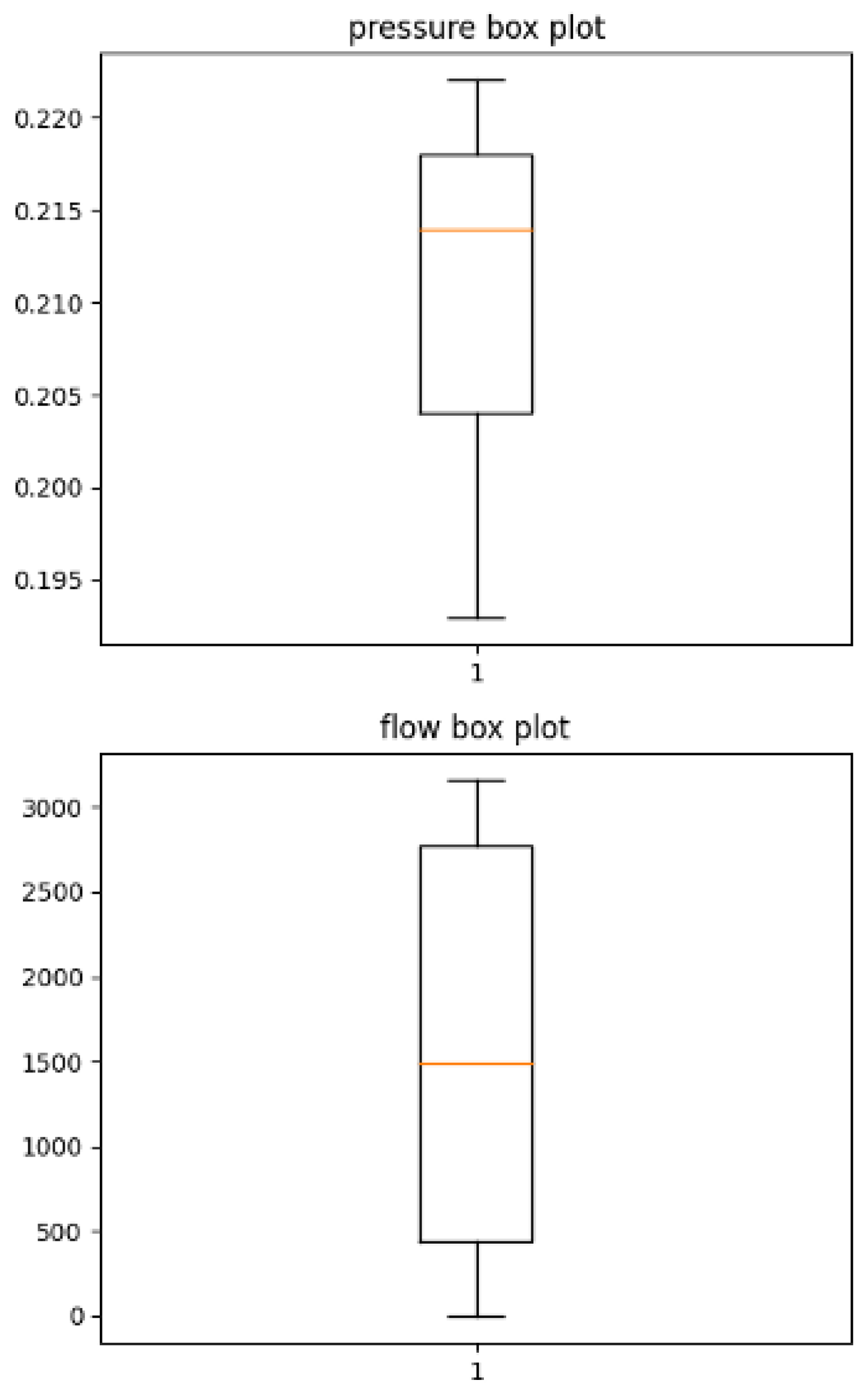
4.1. Data Preprocessing
4.2. Experimental Environment and Results
- Independent multi-series forecasting: in this approach, a single model is trained for all time series, but each time series remains independent of the others, meaning that past values of one series are not used as predictors of other series.
- Dependent multi-series forecasting (multivariate time series): here, all series are modeled together in a single model, considering that each time series depends not only on its past values but also on the past values of the other series.
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jardine, A.K.; Lin, D.; Banjevic, D. A review on machinery diagnostics and prognostics implementing condition-based maintenance. Mech. Syst. Signal Process. 2006, 20, 1483–1510. [Google Scholar] [CrossRef]
- Belkacem, L.; Simeu-Abazi, Z.; Dhouibi, H.; Gascard, E.; Messaoud, H. Diagnostic and prognostic of hybrid dynamic systems: Modeling and RUL evaluation for two maintenance policies. Reliab. Eng. Syst. Saf. 2017, 164, 98–109. [Google Scholar] [CrossRef]
- Kan, M.S.; Tan, A.C.; Mathew, J. A review on prognostic techniques for non-stationary and non-linear rotating systems. Mech. Syst. Signal Process. 2015, 62, 1–20. [Google Scholar] [CrossRef]
- Sikorska, J.Z.; Hodkiewicz, M.; Ma, L. Prognostic modelling options for remaining useful life estimation by industry. Mech. Syst. Signal Process. 2011, 25, 1803–1836. [Google Scholar] [CrossRef]
- Si, X.S.; Wang, W.; Hu, C.H.; Zhou, D.H. Remaining useful life estimation—A review on the statistical data driven approaches. Eur. J. Oper. Res. 2011, 213, 1–14. [Google Scholar] [CrossRef]
- Sun, B.; Zeng, S.; Kang, R.; Pecht, M.G. Benefits and challenges of system prognostics. IEEE Trans. Reliab. 2012, 61, 323–335. [Google Scholar] [CrossRef]
- Lee, J.; Wu, F.; Zhao, W.; Ghaffari, M.; Liao, L.; Siegel, D. Prognostics and health management design for rotary machinery systems—Reviews, methodology and applications. Mech. Syst. Signal Process. 2014, 42, 314–334. [Google Scholar] [CrossRef]
- Kim, N.H.; An, D.; Choi, J.H. Prognostics and Health Management of Engineering Systems; Springer International Publishing: Cham, Switzerland, 2017. [Google Scholar]
- Choi, J.-h. A review on prognostics and health management and its applications. J. Aerosp. Syst. Eng. 2014, 8, 7–17. [Google Scholar]
- Yin, S.; Li, X.; Gao, H.; Kaynak, O. Data-based techniques focused on modern industry: An overview. IEEE Trans. Ind. Electron. 2014, 62, 657–667. [Google Scholar] [CrossRef]
- Sutharssan, T.; Stoyanov, S.; Bailey, C.; Yin, C. Prognostic and health management for engineering systems: A review of the data-driven approach and algorithms. J. Eng. 2015, 2015, 215–222. [Google Scholar] [CrossRef]
- Bektas, O.; Marshall, J.; Jones, J.A. Comparison of computational prognostic methods for complex systems under dynamic regimes: A review of perspectives. Arch. Comput. Methods Eng. 2020, 27, 999–1011. [Google Scholar] [CrossRef]
- Liao, L.; Köttig, F. Review of hybrid prognostics approaches for remaining useful life prediction of engineered systems, and an application to battery life prediction. IEEE Trans. Reliab. 2014, 63, 191–207. [Google Scholar] [CrossRef]
- Choi, S.Y.; Kim, S.H. Knowledge Acquisition and Representation for High-Performance Building Design: A Review for Defining Requirements for Developing a Design Expert System. Sustainability 2021, 13, 4640. [Google Scholar] [CrossRef]
- Soleimani, M.; Campean, F.; Neagu, D. Integration of Hidden Markov Modelling and Bayesian Network for fault detection and prediction of complex engineered systems. Reliab. Eng. Syst. Saf. 2021, 215, 107808. [Google Scholar] [CrossRef]
- Lim, B.; Arık, S.Ö.; Loeff, N.; Pfister, T. Temporal Fusion Transformers for interpretable multi-horizon time series forecasting. Int. J. Forecast. 2021, 37, 1748–1764. [Google Scholar] [CrossRef]
- Zhou, H.; Zhang, S.; Peng, J.; Zhang, S.; Li, J.; Xiong, H.; Zhang, W. Informer: Beyond Efficient Transformer for Long Sequence Time-Series Forecasting. Proc. AAAI Conf. Artif. Intell. 2021, 35, 11106–11115. [Google Scholar] [CrossRef]
- Madhusudhanan, K.; Burchert, J.; Duong-Trung, N.; Born, S.; Schmidt-Thieme, L. Yformer: U-Net Inspired Transformer Architecture for Far Horizon Time Series Forecasting. arXiv 2021, arXiv:2110.08255. [Google Scholar]
- Bai, S.; Kolter, J.Z.; Koltun, V. An empirical evaluation of generic convolutional and recurrent networks for sequence modeling. arXiv 2019, arXiv:1803.01271. [Google Scholar]
- Liu, M.; Zeng, A.; Xu, Z.; Lai, Q.; Xu, Q. Time series is a special sequence: Forecasting with sample convolution and interaction. arXiv 2021, arXiv:2106.09305. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | MSE |
|---|---|
| XGBoost | 2.116176 × 106 |
| LSTM | 2.011905 × 106 |
| Inforemr | 1.999571 × 106 |
| SCINet | 1.965583 × 106 |
| Precision | Recall | F1-Score | Support | |
|---|---|---|---|---|
| Normal | 0.9993 | 0.9988 | 0.9990 | 50,986 |
| Abnormal | 0.8492 | 0.8989 | 0.8734 | 376 |
| macro average | 0.9243 | 0.9489 | 0.9362 | |
| micro average | 0.9981 | 0.9981 | 0.9981 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, M.; Seong, H.; Kim, D. Deep Learning-Based Prognostics and Health Management Model for Pilot-Operated Cryogenic Safety Valves. Sensors 2024, 24, 1814. https://doi.org/10.3390/s24061814
Kim M, Seong H, Kim D. Deep Learning-Based Prognostics and Health Management Model for Pilot-Operated Cryogenic Safety Valves. Sensors. 2024; 24(6):1814. https://doi.org/10.3390/s24061814
Chicago/Turabian StyleKim, Minho, Hansaem Seong, and Dohyun Kim. 2024. "Deep Learning-Based Prognostics and Health Management Model for Pilot-Operated Cryogenic Safety Valves" Sensors 24, no. 6: 1814. https://doi.org/10.3390/s24061814