
Research on the Soft-Sensing Method of Indicator Diagram of Beam Pumping Unit

Abstract
:1. Introduction
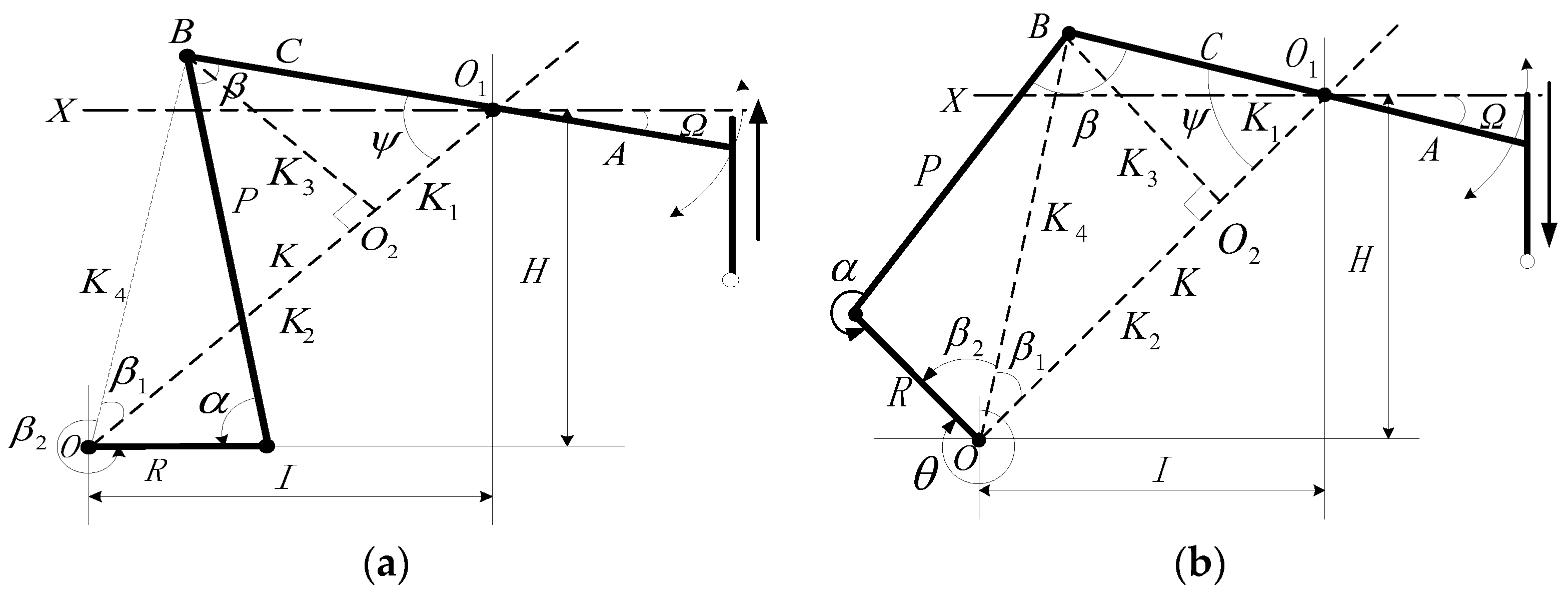
2. Establishment of the Mathematical Model for Measuring the Polished Rod Displacement of the Pumping Unit
3. Establishment of the Mathematical Model for the Soft Sensor of the Polished Rod Load
3.1. Establishment of the Torque Factor Mathematical Model Based on the Angle of the Traveling Beam
3.2. Establishment of the Correlation Model between the Crankshaft Torque and the Polished Rod Load of the Pumping Unit
3.3. Establishment of the Correlation Model between the Polished Rod Load and the Input Electrical Parameters of the Motor
4. Simulation and Optimization of the Soft Sensor for the Indicator Diagram of the Pumping Unit
- (1)
- Calculate the average value, , and the residual error, , of the up-stroke load data.
- (2)
- Calculate the standard deviation, , of the load data of the up-stroke by the Bessel formula.
- (3)
- Compare with . If , then the singular mutation value should be discarded. Otherwise, it should be retained.
- (4)
- The discarded values are supplemented by multiple imputations.
- (5)
- The data processing method of the down-stroke load is the same as that for the up-stroke load.
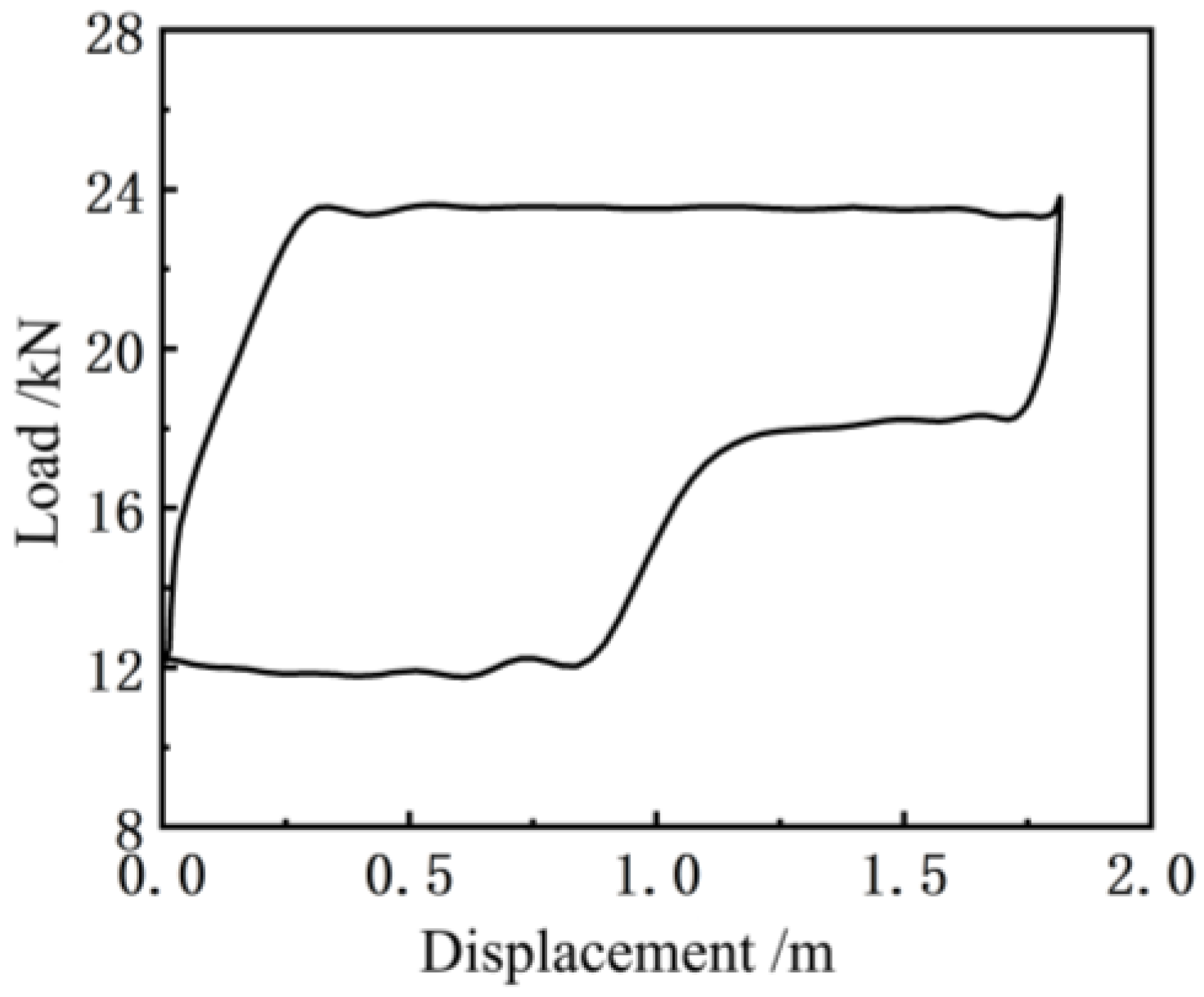
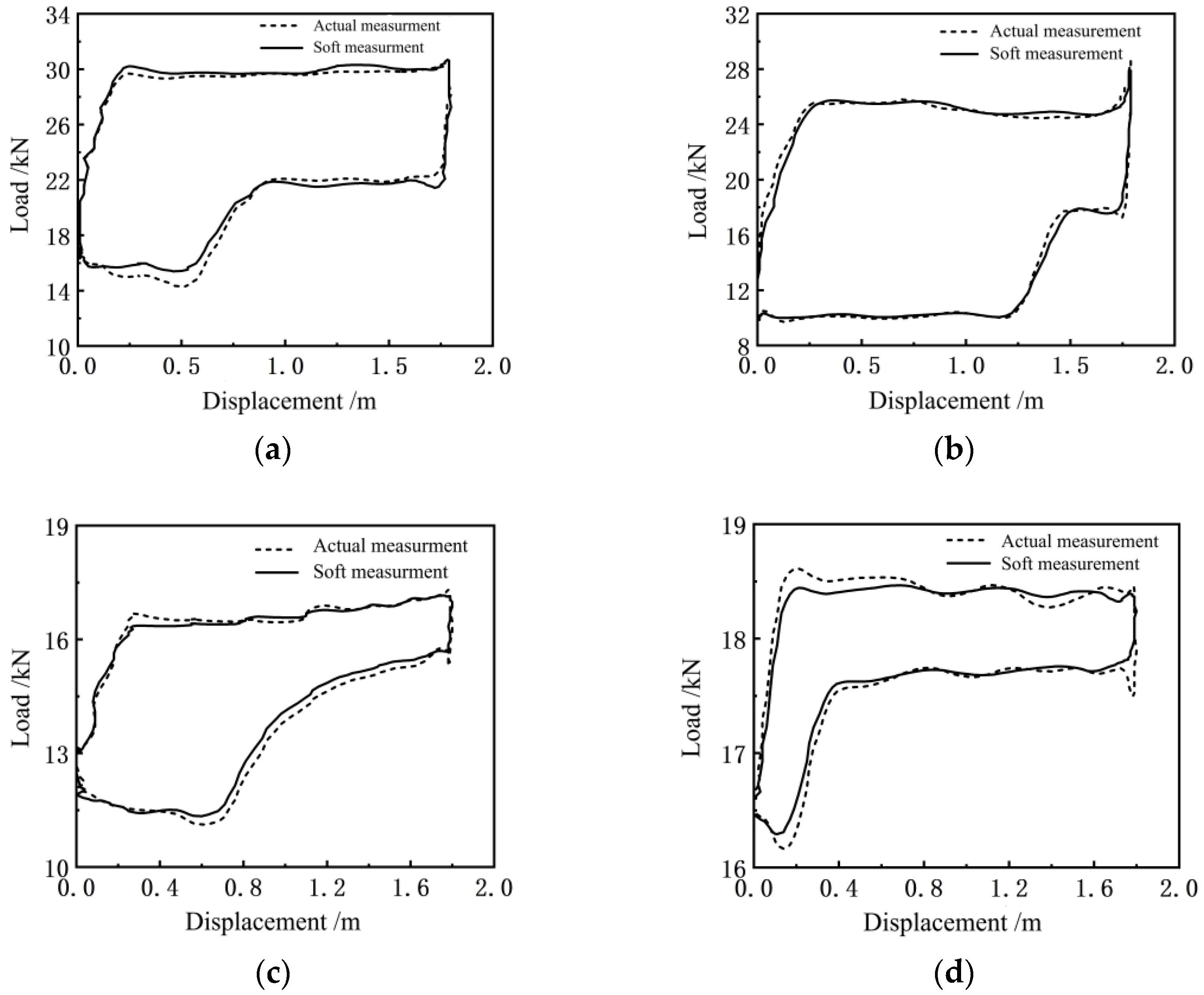
5. Field Test of Soft Sensing for the Indicator Diagram of the Pumping Unit
5.1. Soft Measurement and Control Platform for the Indicator Diagram of the Beam Pumping Unit
5.2. Field Test and Analysis of Soft Sensor for the Indicator Diagram of the Beam Pumping Unit
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xiong, W. Discussion on the application of indicator diagram in oil field energy conservation monitoring. Energy Conserv. Petrol. Petrochem. Ind. 2020, 10, 7–10. [Google Scholar]
- Liu, H.Y. Application strategy of Indicator Diagram technology in oilfield. Chem. Eng. Equip. 2021, 04, 83–84. [Google Scholar]
- Tian, H.; Deng, S.; Wang, C.B.; Ni, X.Y.; Wang, H.; Liu, Y. A novel method for prediction of paraffin deposit in sucker rod pumping system based on CNN indicator diagram feature deep learning. J. Petrol. Sci. Eng. 2021, 206, 108986. [Google Scholar] [CrossRef]
- Liu, C.Q.; Zhu, H.Q. Research of Integrated Wireless Dynamometer for Oil Well Measurement. Comput. Digit. Eng. 2020, 48, 986–991. [Google Scholar]
- Tian, H.F.; Yu, X.C. Design of indicator diagram sensing system based on position sensing and displacement multiplexing. J. Instrum. 2019, 40, 172–180. [Google Scholar]
- Gibbs, S.G.; Neely, A.B. Computer diagnosis of down-hole conditions in sucker rod pumping wells. J. Petrol. Technol. 1966, 18, 91–98. [Google Scholar] [CrossRef]
- Doty, D.R.; Schmidt, Z. An improved model for sucker rod pumping. Soc. Petrol. Eng. J. 1983, 23, 33–41. [Google Scholar] [CrossRef]
- Peng, Y.; Yan, W.H. A Quick Recursion Arithmetic of Calculating Pump Dynamograph of the Sucker-rod Pumping System. Drill. Prod. Technol. 2001, 24, 45–47. [Google Scholar]
- Li, H.J.; Li, Y.; Long, Q.S. Calculation of dynamometer diagram of the pre pumping well with measured power curve. Oil Field Equip. 1992, 05, 33–37. [Google Scholar]
- Lv, Z.Z.; Jiang, C.; Jiang, L.; Zhong, G.X. Study on the test system of oil pumping machine diagram based on electric power. Mach. Des. Manuf. 2019, 03, 225–228. [Google Scholar]
- Li, X.Y.; Gao, X.W.; Yuan, C.H.; Hou, Y.B. Mechanism modeling of multiphase fluid pumping process. J. Mech. Eng. 2020, 56, 214–221. [Google Scholar]
- Zhang, Y.; Qiu, Z.; Zhao, H.; Zhu, L. Power integration based dynamic equilibrium identification method of beam pumping system. In Proceedings of the 2016 Annual IEEE Systems Conference (SysCon), Orlando, FL, USA, 18–21 April 2016; pp. 1–6. [Google Scholar]
- Wang, Y. Research on Energy Consumption Characteristics and Key Technologies of Motor System under Periodic Potential Energy Load; North China Electric Power University: Beijing, China, 2018. [Google Scholar]
- Yin, X.J.; Du, Z.L.; Wang, Y.X. Analysis and experimental study of oil well indicator diagram based on electric parameter method. Energy Rep. 2022, 8, 734–745. [Google Scholar] [CrossRef]
- Lu, Y. Hanging point indicator diagram inversion technology based on FOA-BP neural network. Oil Gas Field Surf. Eng. 2023, 42, 58–63. [Google Scholar]
- Tan, L.; Xie, Q.; Wang, G.M. Research on pumping unit indicator diagram test system based on electric power. Equip. Manag. Maint. 2021, 20, 18–19. [Google Scholar] [CrossRef]
- Yu, H.X.; Hu, J.T. Speed and load torque estimation of induction motor using extended Kalman filter, Chin. J. Sci. Instrum. 2011, 32, 329–335. [Google Scholar]
- Zhang, J.Z.; Li, X.Q.; Shi, H.N. Design Calculation of Beam Pumping Unit; Petroleum Industry Press: Tulsa, OK, USA, 2005. [Google Scholar]
- Huang, H. Application of symmetric component method in solving asymmetric short-circuit current of power transformer. China Electr. Eng. 2022, 05, 34–40. [Google Scholar]
- Mao, Z.J.; Li, J. Research on Calculation Methods for Asymmetric Operation of Power Systems. J. Xingyi Ethn. Norm. Univ. 2023, 04, 119–124. [Google Scholar]
- Zhao, H.J.; Zhang, Y.; Zhu, L.J.; Qiu, Z.M. Power integration based dynamic equilibrium measurement and control device of beam pumping unit. In Proceedings of the 2016 IEEE International Instrumentation and Measurement Technology Conference Proceedings, Taipei, Taiwan, 23–26 May 2016; pp. 1–6. [Google Scholar]
- Zhan, G.B.; Zong, Z.H.; Ji, Z. Torque control of permanent magnet synchronous motor using extended Kalman filter. Micromotor 2020, 53, 94–98. [Google Scholar]
- Dong, S.M.; Li, W.C.; Hou, T.B.; Wang, H.B.; Chen, J.X. Optimizing the Running Par ameters of a Variable Frequency Beam Pumping System and Simulating Its Dynamic Behaviors. J. Mech. Eng. 2016, 52, 63–70. [Google Scholar] [CrossRef]
- Liu, X.H. Fault identification of digital weighing sensor based on statistical analysis method. China Instrum. Meter. 2021, 7, 59–61. [Google Scholar]
- Yang, G.; Wang, T.W.; Zhang, P. Research on curve smoothing algorithm for diesel indicator diagram. Vibroeng. Procedia 2020, 32, 179–184. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Type | Parameter Value |
|---|---|
| A (/m) | 1.720 |
| C (/m) | 1.520 |
| P (/m) | 2.666 |
| R (/m) | 0.677 |
| K (/m) | 3.400 |
| H (/m) | 2.540 |
| I (/m) | 2.490 |
| Ib (/m) | 2.530 |
| n (/min−1) | 3.4 |
| η (/%) | 90 |
| ηE (/%) | 85 |
| B (/kN) | −0.3 |
| (/kN) | 4 |
| Well Number | Displacement (m) | Calculated Load (kN) | Measureed Load (kN) | Maximum Relative Error (%) |
|---|---|---|---|---|
| Wang 10-252 | 0.50 | 15.29 | 14.43 | 5.95 |
| Wang 13-282 | 1.75 | 18.25 | 17.46 | 4.52 |
| Wang 13-251 | 1.77 | 17.88 | 17.51 | 2.11 |
| Wang 10-024 | 0.27 | 16.36 | 16.68 | −1.91 |
| Wang 14-241 | 1.72 | 11.05 | 10.67 | 3.56 |
| Wang 15-26 | 0.33 | 26.34 | 27.71 | −4.94 |
| Wang 16-241 | 1.49 | 10.35 | 9.84 | 5.18 |
| Wangbian 15-26 | 1.72 | 17.26 | 16.53 | 4.41 |
| Wangbian 14-27 | 0.45 | 31.62 | 30.84 | 2.52 |
| Wangbian 14-28 | 0.32 | 17.03 | 16.32 | 4.35 |
| Average relative error | 3.95% | |||
| Date (2023) | Maximum Relative Error (%) | Date (2023) | Maximum Relative Error (%) | Date (2023) | Maximum Relative Error (%) |
|---|---|---|---|---|---|
| 1/1 | 3.16% | 5/1 | 3.91% | 9/1 | 4.62% |
| 2/1 | 2.76% | 6/1 | 4.19% | 10/1 | 4.18% |
| 3/1 | 5.28% | 7/1 | 3.87% | 11/1 | 2.55% |
| 4/1 | 3.56% | 8/1 | 3.36% | 12/1 | 3.41% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, H.; Wang, J.; Liu, T.; Yu, Y.; Hu, D.; Cai, C. Research on the Soft-Sensing Method of Indicator Diagram of Beam Pumping Unit. Sensors 2024, 24, 1794. https://doi.org/10.3390/s24061794
Zhao H, Wang J, Liu T, Yu Y, Hu D, Cai C. Research on the Soft-Sensing Method of Indicator Diagram of Beam Pumping Unit. Sensors. 2024; 24(6):1794. https://doi.org/10.3390/s24061794
Chicago/Turabian StyleZhao, Huaijun, Junping Wang, Tianyu Liu, Yang Yu, Dingxing Hu, and Chenxin Cai. 2024. "Research on the Soft-Sensing Method of Indicator Diagram of Beam Pumping Unit" Sensors 24, no. 6: 1794. https://doi.org/10.3390/s24061794