

Passive Infrared Sensor-Based Occupancy Monitoring in Smart Buildings: A Review of Methodologies and Machine Learning Approaches
 , , ,
, , ,
Abstract
:1. Introduction
2. Material and Methods
2.1. Research Questions
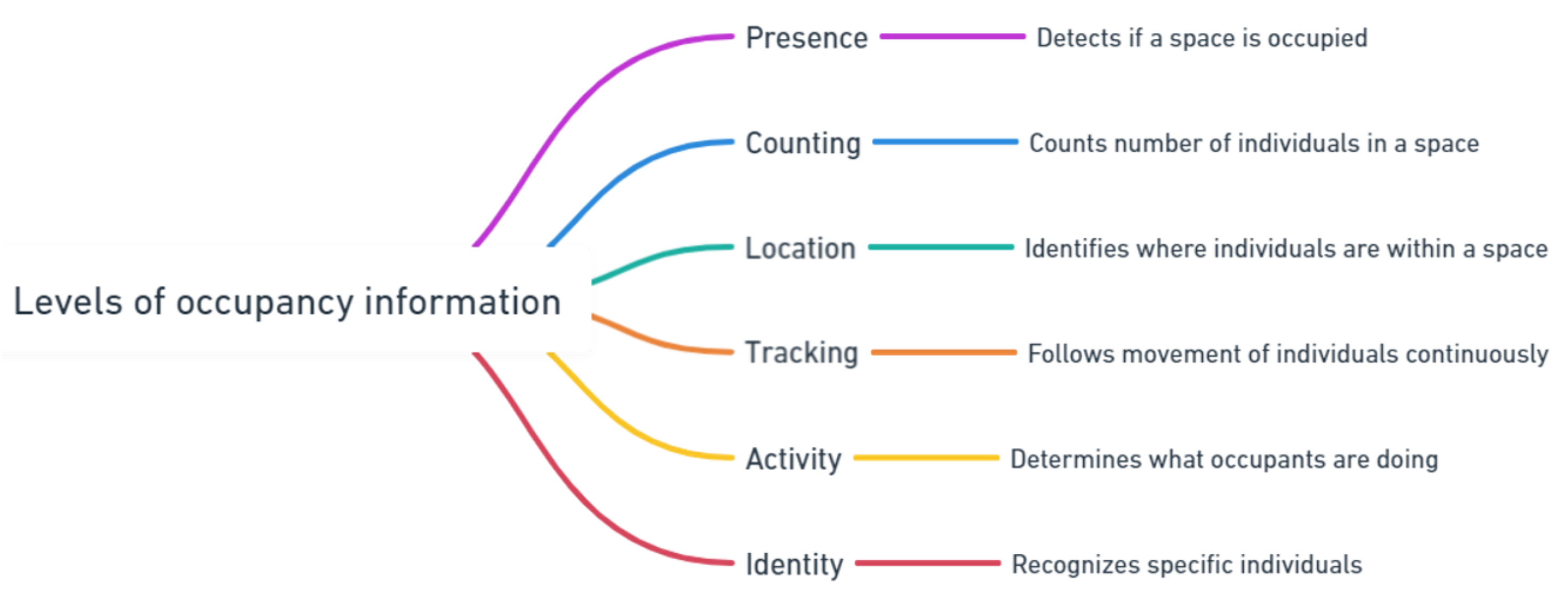
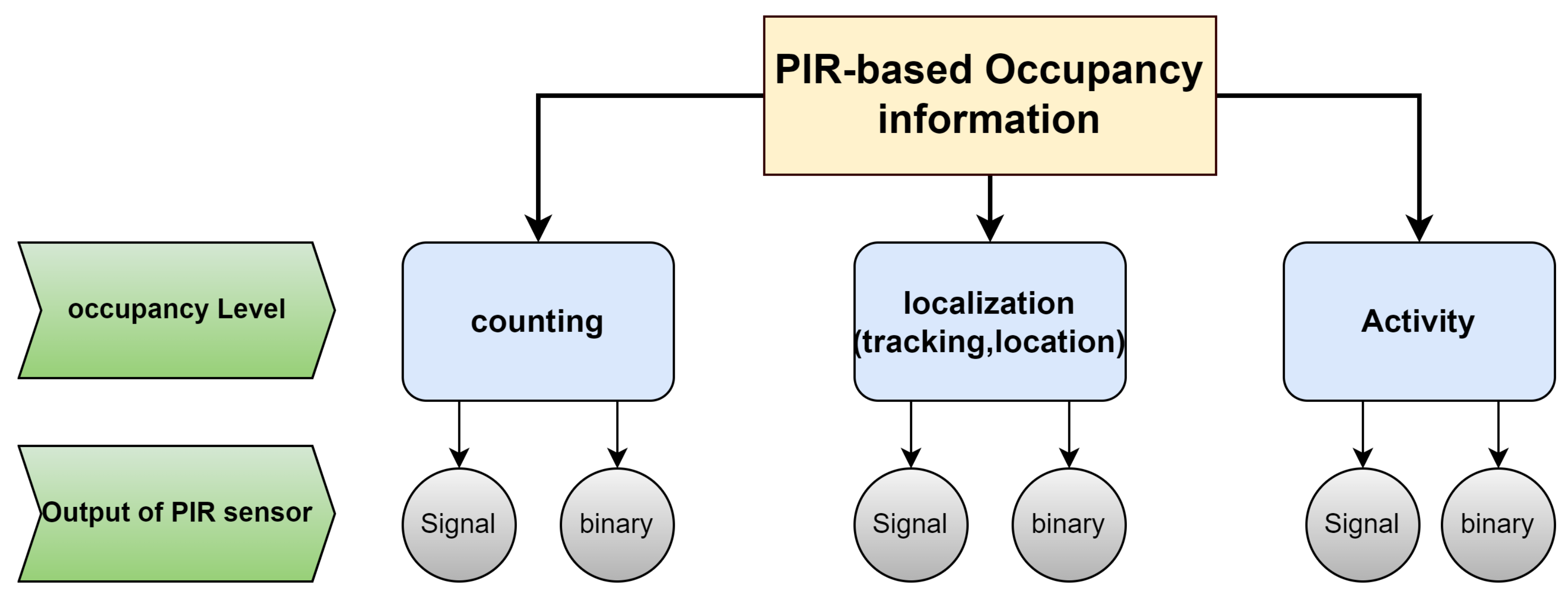
- RQ1: Which type of PIR sensor, binary or signal-based, is predominantly used for capturing different levels of occupancy information (counting, localization, and activity)?
- RQ2: What kinds of machine learning algorithms or other methods are mostly used for data processing based on PIR sensors?
- RQ3: What is the suitable quantity and location of PIR sensors within buildings and individual rooms (spatial resolution) to effectively capture different levels of occupancy information, recognizing that this depends on a variety of factors?
- RQ4: What kind of occupant activity can we detect with the binary and signal-based PIR sensors?
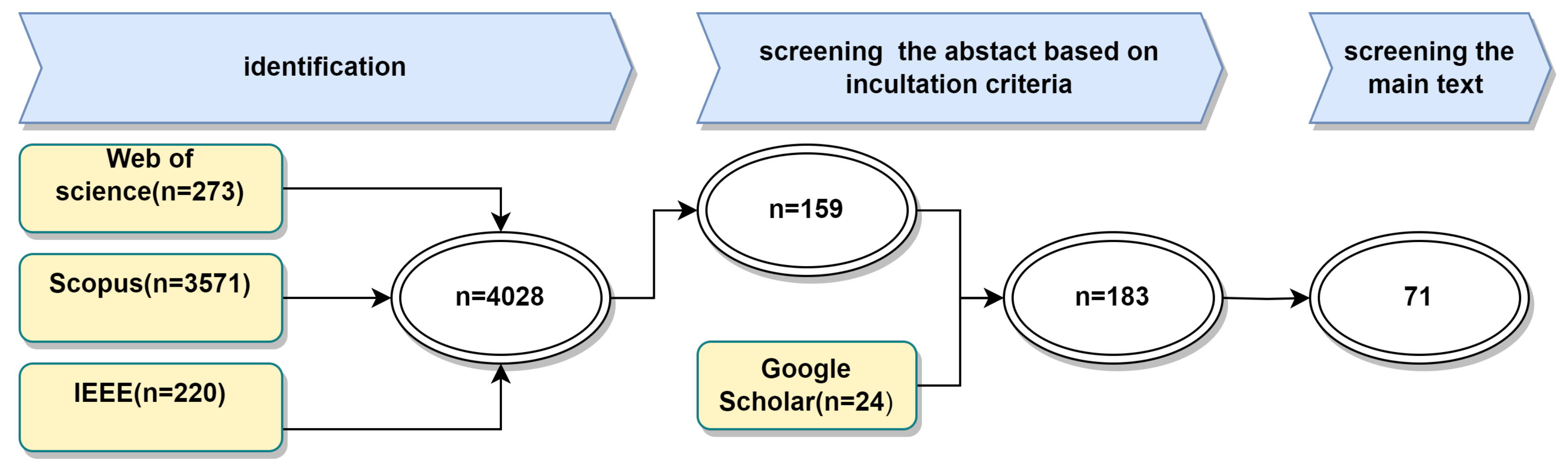
2.2. Search Process
3. Result
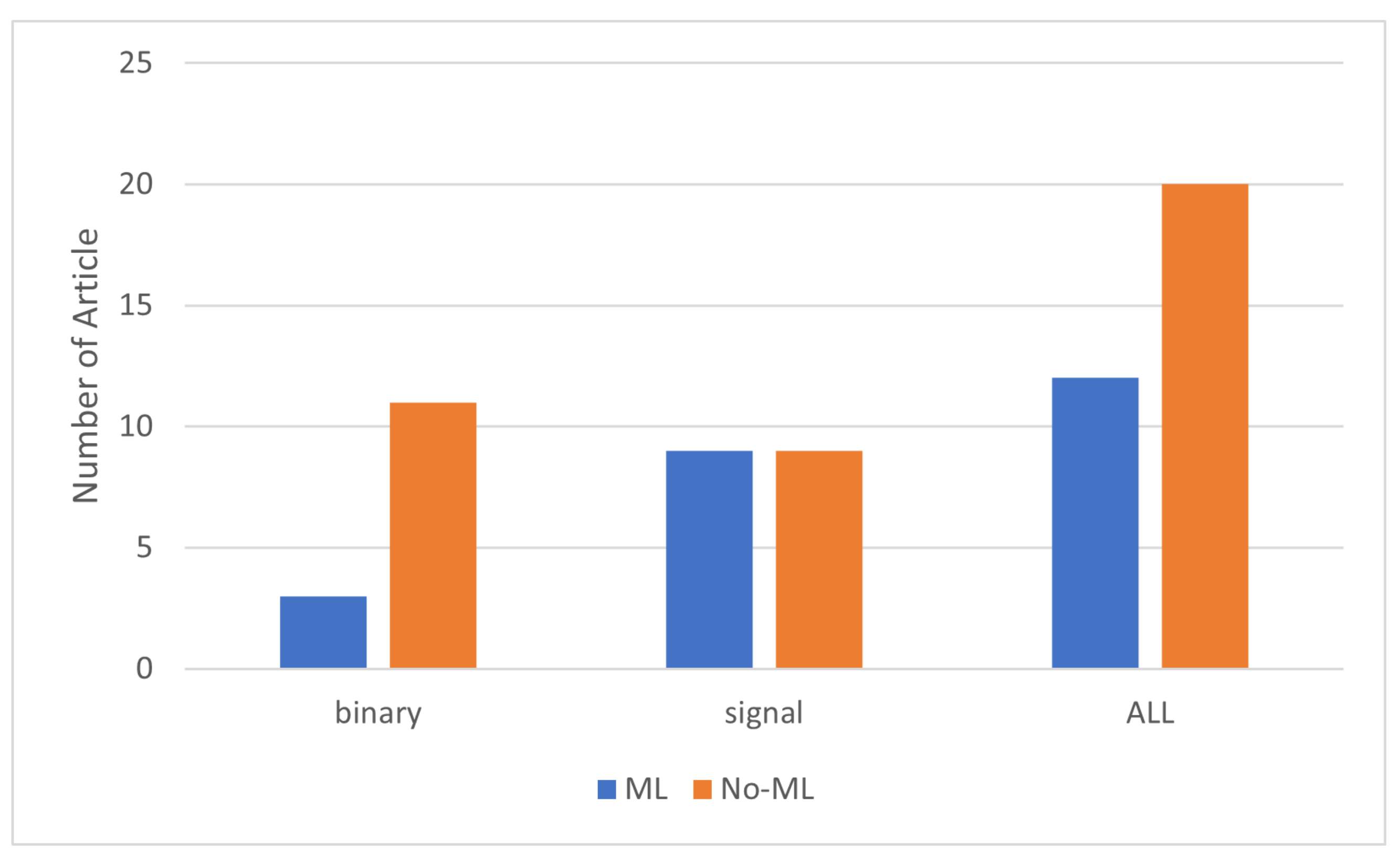
3.1. Comparing Binary and Signal-Based Sensors for Occupancy Information
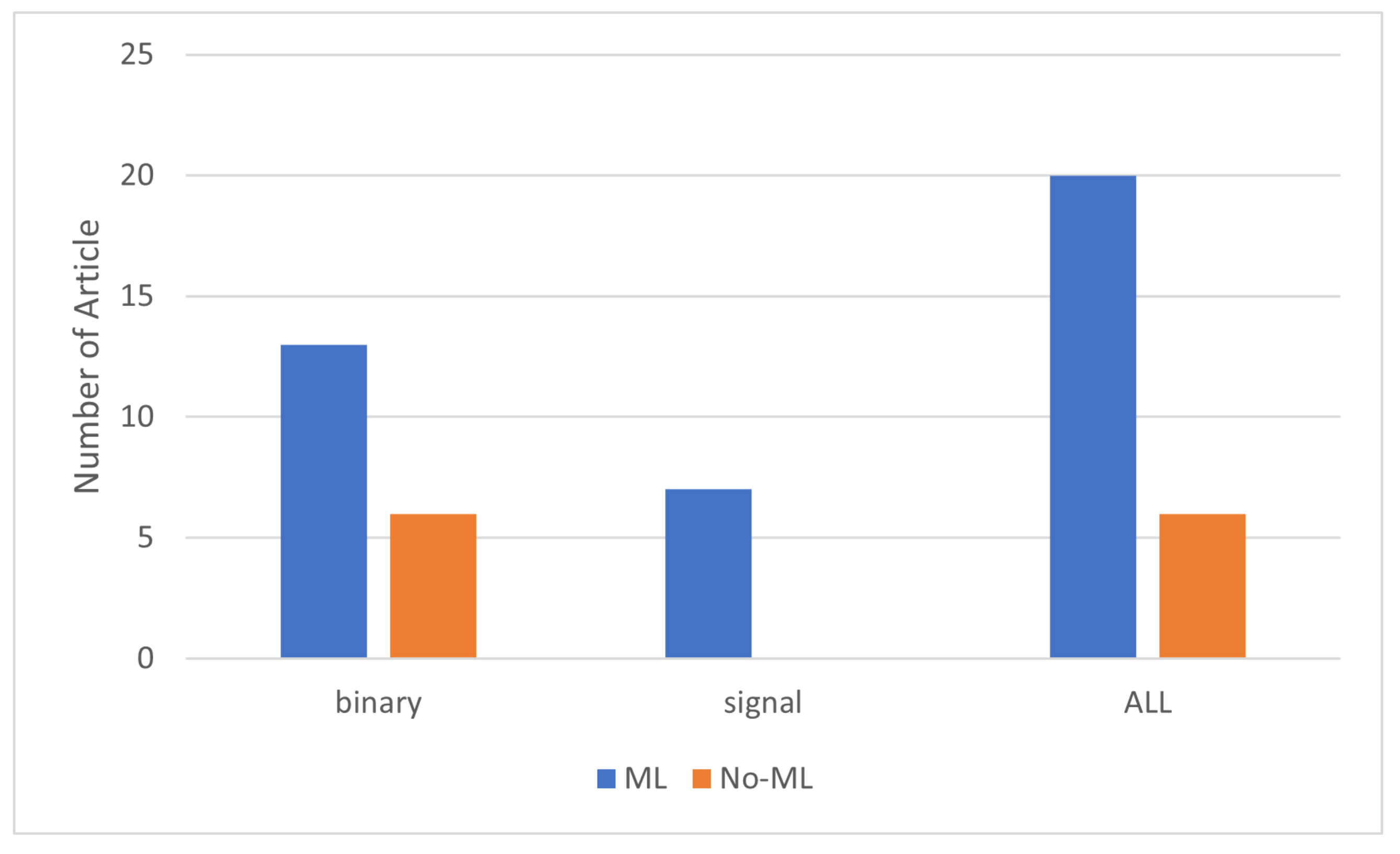
3.2. PIR Sensors for People Counting

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref | Output | Location (Number of Sensors) | Method | Results | People Number | Spatial Resolution |
|---|---|---|---|---|---|---|
| [54] | Binary | Entrance (1), wall (1 in each room) | Own algorithm | Accuracy (86.78%) | 6 | Building |
| [51] | Binary | Entrance (1 inside and 1 outside) | Own algorithm | NA | Any | Building |
| [53] | Binary | Under the desk (1 for each table) | Own algorithm | Accuracy (PIRATES 87.5%) | 3 | Building |
| [55] | Binary | Wall, ceiling, door (25-TM004 data set) | Machine learning | Accuracy (Unsupervised learning (sMRT 80%, NN-sg 80%, GNN-sg 83%)) | 4 | Building |
| [52] | Binary | Entrance (1 inside and 1 outside) | Own methods | No error | Any | Room |
| [56] | Signal | On bar (3) | Own algorithm | Accuracy (90%) | Any | Specific area |
| [39] | Signal | Room corner (4) | Machine learning | Accuracy (CNN + BiLSTM 99.5%) | 3 | Room |
| [57] | Signal | Entrance (1), wall (1 in each room) | Machine learning | Accuracy (SVM 77.3%) | 80 | Room |
| [58] | Signal | Entrance (8 inside and 8 outside) | Machine learning | Accuracy (CNN 92.75%), (DT and RBMLR 60%), (LR 78%), (NB 82%) | any | Room |
| [59] | Signal | Wall room corner (4) | Own algorithm | Accuracy (80%) | 3 | Room |
| [60] | Signal | Wall (1) | Machine learning | Accuracy (hidden Markov models linear regression 99%) | 7 | Room |
| [61] | Signal | Robotic actuator (1) | Machine learning | Accuracy (ANN 91%) | 3 | Room |
- Direct Detection-Based People Counting In direct detection-based people counting, both signal-based and binary-based methods can be employed to count individuals within a specific area. Advanced signal processing and machine learning are applied to signal-based PIR data for a more accurate count, providing detailed insights with fewer sensors. Conversely, while the binary-based approach can utilize machine learning and other techniques, it generally requires a larger number of sensors to achieve similar accuracy. Overall, the signal-based method is typically preferred for specific areas due to its efficiency and the depth of information it provides, making it a more effective solution for accurately counting people.
- Contextual Inference-Based People Counting Contextual inference-based people counting is a method that relies on the context of an environment to deduce the presence and number of people within a specific area. This approach is particularly effective in areas where behaviors and patterns can be predicted and analyzed. It typically includes door monitoring and stationary monitoring, each utilizing both binary and signal-based detection methods.
- Door Monitoring: This technique involves placing sensors at doorways to count individuals as they enter or exit. Binary-based detection has been prevalently employed in previous work, especially for rooms, due to its simplicity and effectiveness in scenarios where the presence of more than one person is unlikely at the same time when they pass the door. However, for the main entrances of buildings where multiple people might enter or exit simultaneously, signal-based detection might be a better option. Signal-based methods can provide more detailed information, allowing the system to differentiate between multiple individuals at the same time.
- Stationary Monitoring: This method places sensors in areas where people are expected to be stationary, such as under a table or at a desk. Movement detected in these zones is interpreted as an indication of the presence of a person. Both binary and signal-based detection can be used here. Binary-based might suffice in less complex scenarios where any movement is a strong indicator of presence.

3.3. PIR Sensors for Localization
| Ref | Output | Location | Spatial Resolution | Number of Sensors | Algorithms | Number of People | Machine Learning |
|---|---|---|---|---|---|---|---|
| [67] | Binary | Floor | Room (specific area) | 9 nodes | (Anti-logic) distance error 0.49 m for target 1 and 0.50 m for target 2. | 2 | No |
| [68] | Binary | Floor | Room (specific area) | 9 nodes | (Own methods), average distance errors target 1 (0.62 m) and target 2 (0.53 m) | 2 | No |
| [69] | Binary | Wall | Room | 16 | (Own methods (graph based)), average tracking error is 0.4706 m | 2 | No |
| [70] | Binary | Corner | Room | 4 | (Own methods (ULT)), RMSE values of 0.33 m for ULT and 1.09 m for RDLT | 1 | No |
| [71] | Binary | Ceiling | Buildings | 10 | (Own methods–Maps and A-Star Algorithm), average error (m) 0.21 | 1 | No |
| [72] | Binary | Ceiling | Building | 9 | (Own methods–map based), position error 0.6 m | 1 | No |
| [66] | Binary | Floor | Room (specific area) | 9 | (NBCL-Naive Bayes classifier), distance error (m) target 1 (0.67) target 2 0.56 | 2 | Yes |
| [73] | Binary | Ceiling, Wall | Buildings | 7 | (Own methods–Transferable Belief Model), scenario01 Error rate 3.3% | 1 | No |
| [74] | Binary | Robot | Room | 4 | (Decision Tree classifier), accuracy 83.3%. | 1 | Yes |
| [65] | Binary | Floor | Room (specific area) | 9 nodes | (Probabilistic neural network CLBNNRP) RMSE (m) X (33.5) Y (0.33) Distance (0.33) | 2 | Yes |
| [75] | Binary | Floor | Room (specific area) | 9 nodes | (Own methods), Credit-Based Method average distance errors (0.47 m) target 1 target 2 (0.42 m) | 2 | No |
| [76] | Signal | Ceiling | Room | 4 | (ANN + LSTM) Mean Error (m) 0.68 | 2 | Yes |
| [77] | Signal | Corner | Room | 4 | (CNN, BiLSTM) accuracy 96.1%, average localization errors 0.82 m | 3 | Yes |
| [78] | Signal | Wall | Room | 4 | (CNN, BiLSTM) average localization errors 0.88 m | 3 | Yes |
| [59] | Signal | Wall | Room | 4 | (PIRATES) average localization error 0.87 m | 2 | No |
| [39] | Signal | Wall | Room | 8 | (CNN, BiLSTM), f1 Score 0.94, average localization errors 1.34 m | 5 | Yes |
| [79] | Signal | Ceiling | Room | 5 | Mean distance error (CNN-LSTM 0.2359), (CNN-BiLSTM 0.3131), (CNN-GRU 0.5198) Particle filter (0.5482 m) | 1 | Yes |
| [80] | Signal | Ceiling | Room | 5 | Mean distance error CNN-LSTM (0.2379) CNN-BiLSTM (0.3222) CNN-GRN (0.5172) SVR (0.69) | 1 | Yes |
| [81] | Signal | Ceiling | Room | 4 | (Own methods (signal-based)), Mean error (m) 0.7, accuracy 80% or higher in all scenarios | 1 | No |
| [82] | Signal | Ceiling | Room | 2 module (4 PIR in module) | (Own methods), RMSE (meter) (Localization Algorithm) 0.3118 (Kalman Filter) 0.285 | 1 | No |
| [83] | Signal | Ceiling | Room | 5 module (9 PIR in module) | (own methods–Kalman Filter), RMSE 0.68 | 1 | No |
| [84] | Signal | Ceiling | Room | 4 | (own methods–Kalman Filter), 0.254, TBM-based Hybrid Method 0.219 | 1 | No |
| [85] | Signal | Wall | Room | 2 Sensing Tower 16 PIR for each | accuracy of 0.113 m | 1 | No |
- Building Scale Localization: This level focuses on identifying the specific room a person occupies within a building. Binary-based PIR sensors are the preferred choice for this task due to their efficiency in detecting whether individuals are present or absent as they move between rooms. Positioned at critical points like doorways, these sensors give a broad yet effective overview of where people are located throughout the building.
- Room Scale Localization: For pinpointing an individual’s exact position within a particular room or area, signal-based PIR sensors are primarily employed based on extensive research. These sensors provide a continuous stream of data vital for accurately identifying a person’s precise location in a confined space. They analyze the intensity and fluctuations of signals over time, allowing the system to detect subtle movements and specific positions within the room. This detailed approach offers a greater depth of understanding about an individual’s location and movement on a smaller scale compared to more general building-scale localization.
3.4. PIR Sensors for Activity Detection
- Direct Movement-Based Activities:These activities are characterized by the direct physical movement they involve, which can be detected by a PIR sensor. Signal-based detection is considered superior to binary-based detection because it allows the reception of continuous signals. This continuous signal reception enhances the sensor’s ability to capture nuanced movements and variations in activity.
- Context-Dependent Activities:These activities are deduced based on the PIR sensor’s location and the assumption that movement in a specific area is associated with a particular activity. Previous research has shown that binary-based detection is widely used and effective for this context. The binary-based approach simplifies the analysis by focusing on the presence or absence of movement, making it popular and well-suited for inferring context-dependent activities.
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Daissaoui, A.; Boulmakoul, A.; Karim, L.; Lbath, A. IoT and big data analytics for smart buildings: A survey. Procedia Comput. Sci. 2020, 170, 161–168. [Google Scholar] [CrossRef]
- Aliero, M.S.; Asif, M.; Ghani, I.; Pasha, M.F.; Jeong, S.R. Systematic review analysis on smart building: Challenges and opportunities. Sustainability 2022, 14, 3009. [Google Scholar] [CrossRef]
- Rejeb, A.; Rejeb, K.; Simske, S.; Treiblmaier, H.; Zailani, S. The big picture on the internet of things and the smart city: A review of what we know and what we need to know. Internet Things 2022, 19, 100565. [Google Scholar] [CrossRef]
- Li, K.; Zhao, J.; Hu, J.; Chen, Y. Dynamic energy efficient task offloading and resource allocation for noma-enabled iot in smart buildings and environment. Build. Environ. 2022, 226, 109513. [Google Scholar] [CrossRef]
- Elkhoukhi, H.; NaitMalek, Y.; Berouine, A.; Bakhouya, M.; Elouadghiri, D.; Essaaidi, M. Towards a real-time occupancy detection approach for smart buildings. Procedia Comput. Sci. 2018, 134, 114–120. [Google Scholar] [CrossRef]
- Tekler, Z.D.; Low, R.; Yuen, C.; Blessing, L. Plug-Mate: An IoT-based occupancy-driven plug load management system in smart buildings. Build. Environ. 2022, 223, 109472. [Google Scholar] [CrossRef]
- Saleem, M.U.; Shakir, M.; Usman, M.R.; Bajwa, M.H.T.; Shabbir, N.; Shams Ghahfarokhi, P.; Daniel, K. Integrating smart energy management system with internet of things and cloud computing for efficient demand side management in smart grids. Energies 2023, 16, 4835. [Google Scholar] [CrossRef]
- Sayeduzzaman, M.; Hasan, T.; Nasser, A.A.; Negi, A. An Internet of Things-Integrated Home Automation with Smart Security System. In Automated Secure Computing for Next-Generation Systems; 2024; pp. 243–273. Available online: https://www.wiley.com/en-no/Automated+Secure+Computing+for+Next+Generation+Systems-p-9781394213924 (accessed on 24 January 2024).
- Rondon, L.P.; Babun, L.; Aris, A.; Akkaya, K.; Uluagac, A.S. Survey on enterprise Internet-of-Things systems (E-IoT): A security perspective. Ad. Hoc. Netw. 2022, 125, 102728. [Google Scholar] [CrossRef]
- Shah, S.F.A.; Iqbal, M.; Aziz, Z.; Rana, T.A.; Khalid, A.; Cheah, Y.N.; Arif, M. The role of machine learning and the internet of things in smart buildings for energy efficiency. Appl. Sci. 2022, 12, 7882. [Google Scholar] [CrossRef]
- Luo, J. A Bibliometric Review on Artificial Intelligence for Smart Buildings. Sustainability 2022, 14, 10230. [Google Scholar] [CrossRef]
- Rodriguez-Gracia, D.; de las Mercedes Capobianco-Uriarte, M.; Terán-Yépez, E.; Piedra-Fernández, J.A.; Iribarne, L.; Ayala, R. Review of artificial intelligence techniques in green/smart buildings. Sustain. Comput. Inform. Syst. 2023, 38, 100861. [Google Scholar] [CrossRef]
- Genkin, M.; McArthur, J. B-SMART: A reference architecture for artificially intelligent autonomic smart buildings. Eng. Appl. Artif. Intell. 2023, 121, 106063. [Google Scholar] [CrossRef]
- Baduge, S.K.; Thilakarathna, S.; Perera, J.S.; Arashpour, M.; Sharafi, P.; Teodosio, B.; Shringi, A.; Mendis, P. Artificial intelligence and smart vision for building and construction 4.0: Machine and deep learning methods and applications. Autom. Constr. 2022, 141, 104440. [Google Scholar] [CrossRef]
- Zamponi, M.E.; Barbierato, E. The dual role of artificial intelligence in developing smart cities. Smart Cities 2022, 5, 728–755. [Google Scholar] [CrossRef]
- Debrah, C.; Chan, A.P.; Darko, A. Artificial intelligence in green building. Autom. Constr. 2022, 137, 104192. [Google Scholar] [CrossRef]
- Liu, Z.; Guo, Z.; Chen, Q.; Song, C.; Shang, W.; Yuan, M.; Zhang, H. A review of data-driven smart building-integrated photovoltaic systems: Challenges and objectives. Energy 2023, 263, 126082. [Google Scholar] [CrossRef]
- Constantinou, S.; Konstantinidis, A.; Chrysanthis, P.K.; Zeinalipour-Yazti, D. Green planning of IoT home automation workflows in smart buildings. ACM Trans. Internet Things 2022, 3, 1–30. [Google Scholar] [CrossRef]
- Kadaei, S.; Nezam, Z.; González-Lezcano, R.A.; Shokrpour, S.; Mohammadtaheri, A.; Doraj, P.; Akar, U. A new approach to determine the reverse logistics-related issues of smart buildings focusing on sustainable architecture. Front. Environ. Sci. 2023, 10, 2510. [Google Scholar] [CrossRef]
- Trivedi, D.; Badarla, V. Occupancy detection systems for indoor environments: A survey of approaches and methods. Indoor Built Environ. 2020, 29, 1053–1069. [Google Scholar] [CrossRef]
- Esrafilian-Najafabadi, M.; Haghighat, F. Occupancy-based HVAC control systems in buildings: A state-of-the-art review. Build. Environ. 2021, 197, 107810. [Google Scholar] [CrossRef]
- Ding, Y.; Han, S.; Tian, Z.; Yao, J.; Chen, W.; Zhang, Q. Review on occupancy detection and prediction in building simulation. In Building Simulation; Springer: Berlin/Heidelberg, Germany, 2022; pp. 1–24. [Google Scholar]
- Melfi, R.; Rosenblum, B.; Nordman, B.; Christensen, K. Measuring building occupancy using existing network infrastructure. In Proceedings of the 2011 International Green Computing Conference and Workshops, Orlando, FL, USA, 25–28 July 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–8. [Google Scholar]
- Jin, Y.; Yan, D.; Chong, A.; Dong, B.; An, J. Building occupancy forecasting: A systematical and critical review. Energy Build. 2021, 251, 111345. [Google Scholar] [CrossRef]
- Alsafery, W.; Rana, O.; Perera, C. Sensing within smart buildings: A survey. ACM Comput. Surv. 2023, 55, 1–35. [Google Scholar] [CrossRef]
- Sun, K.; Zhao, Q.; Zou, J. A review of building occupancy measurement systems. Energy Build. 2020, 216, 109965. [Google Scholar] [CrossRef]
- Tekler, Z.D.; Chong, A. Occupancy prediction using deep learning approaches across multiple space types: A minimum sensing strategy. Build. Environ. 2022, 226, 109689. [Google Scholar] [CrossRef]
- Tekler, Z.D.; Low, R.; Gunay, B.; Andersen, R.K.; Blessing, L. A scalable Bluetooth Low Energy approach to identify occupancy patterns and profiles in office spaces. Build. Environ. 2020, 171, 106681. [Google Scholar] [CrossRef]
- Chen, Z.; Jiang, C.; Xie, L. Building occupancy estimation and detection: A review. Energy Build. 2018, 169, 260–270. [Google Scholar] [CrossRef]
- Ahmad, J.; Larijani, H.; Emmanuel, R.; Mannion, M.; Javed, A. Occupancy detection in non-residential buildings–A survey and novel privacy preserved occupancy monitoring solution. Appl. Comput. Inform. 2021, 17, 279–295. [Google Scholar] [CrossRef]
- Sayed, A.N.; Himeur, Y.; Bensaali, F. Deep and transfer learning for building occupancy detection: A review and comparative analysis. Eng. Appl. Artif. Intell. 2022, 115, 105254. [Google Scholar] [CrossRef]
- Zhao, L.; Li, Y.; Liang, R.; Wang, P. A State of Art Review on Methodologies of Occupancy Estimating in Buildings from 2011 to 2021. Electronics 2022, 11, 3173. [Google Scholar] [CrossRef]
- Emad-Ud-Din, M.; Wang, Y. Indoor Occupancy Sensing via Networked Nodes (2012–2022): A Review. Future Internet 2023, 15, 116. [Google Scholar] [CrossRef]
- Rueda, L.; Agbossou, K.; Cardenas, A.; Henao, N.; Kelouwani, S. A comprehensive review of approaches to building occupancy detection. Build. Environ. 2020, 180, 106966. [Google Scholar] [CrossRef]
- Mena, A.R.; Ceballos, H.G.; Alvarado-Uribe, J. Measuring indoor occupancy through environmental sensors: A systematic review on sensor deployment. Sensors 2022, 22, 3770. [Google Scholar] [CrossRef] [PubMed]
- Azimi, S.; O’Brien, W. Fit-for-purpose: Measuring occupancy to support commercial building operations: A review. Build. Environ. 2022, 212, 108767. [Google Scholar] [CrossRef]
- Ji, W.; Yang, L.; Liu, Z.; Feng, S. A Systematic Review of Sensing Technology in Human-Building Interaction Research. Buildings 2023, 13, 691. [Google Scholar] [CrossRef]
- Ngamakeur, K.; Yongchareon, S.; Yu, J.; Rehman, S.U. A survey on device-free indoor localization and tracking in the multi-resident environment. ACM Comput. Surv. (CSUR) 2020, 53, 1–29. [Google Scholar] [CrossRef]
- Yang, T.; Guo, P.; Liu, W.; Liu, X.; Hao, T. Enhancing PIR-based multi-person localization through combining deep learning with domain knowledge. IEEE Sens. J. 2020, 21, 4874–4886. [Google Scholar] [CrossRef]
- De, P.; Chatterjee, A.; Rakshit, A. PIR-Sensor-Based Surveillance Tool for Intruder Detection in Secured Environment: A Label-Consistency-Based Modified Sequential Dictionary Learning Approach. IEEE Internet Things J. 2022, 9, 20458–20466. [Google Scholar] [CrossRef]
- Ergi, B.N.G.; Mandala, S. PIR Sensor-Based Intelligent Home Security System Design Analysis Using Machine Learning Methods. In Proceedings of the 2023 International Conference on Data Science and Its Applications (ICoDSA), Bandung, Indonesia, 9–10 August 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 175–180. [Google Scholar]
- Cetin, A.E.; Ozturk, Y.; Hanosh, O.; Ansari, R. Review of signal processing applications of Pyroelectric Infrared (PIR) sensors with a focus on respiration rate and heart rate detection. Digit. Signal Process. 2021, 119, 103247. [Google Scholar] [CrossRef]
- Hanosh, O.; Ansari, R.; Younis, K.; Cetin, A.E. Real-time epileptic seizure detection during sleep using passive infrared sensors. IEEE Sens. J. 2019, 19, 6467–6476. [Google Scholar] [CrossRef]
- Veronese, F.; Comai, S.; Mangano, S.; Matteucci, M.; Salice, F. PIR Probability Model for a Cost/Reliability Tradeoff Unobtrusive Indoor Monitoring System. In Proceedings of the Smart Objects and Technologies for Social Good: Second International Conference, GOODTECHS 2016, Venice, Italy, 30 November–1 December 2016; Proceedings 2. Springer: Berlin/Heidelberg, Germany, 2017; pp. 61–69. [Google Scholar]
- Xiao, S.; Yuan, L.; Luo, W.; Li, D.; Zhou, C.; Yu, Z. Recovering human motion patterns from passive infrared sensors: A geometric-algebra based generation-template-matching approach. ISPRS Int. J.-Geo-Inf. 2019, 8, 554. [Google Scholar] [CrossRef]
- Murao, K.; Terada, T.; Yano, A.; Matsukura, R. Estimating trajectory of inhabitants with sparsely aligned infrared sensors. In Proceedings of the 2016 19th International Conference on Network-Based Information Systems (NBiS), Ostrava, Czech Republic, 7–9 September 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 323–329. [Google Scholar]
- Porins, R.; Apse-Apsitis, P.; Avotins, A. PIR-Sensor Based Street Lighting System Control. In Proceedings of the 2020 IEEE 8th Workshop on Advances in Information, Electronic and Electrical Engineering (AIEEE), Vilnius, Estonia, 22–24 April 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–4. [Google Scholar]
- Fujiwara, M.; Kashimoto, Y.; Fujimoto, M.; Suwa, H.; Arakawa, Y.; Yasumoto, K. Implementation and evaluation of analog-pir-sensor-based activity recognition. SICE J. Control. Meas. Syst. Integr. 2017, 10, 385–392. [Google Scholar] [CrossRef]
- Andrews, J.; Vakil, A.; Li, J. Biometric authentication and stationary detection of human subjects by deep learning of passive infrared (PIR) sensor data. In Proceedings of the 2020 IEEE Signal Processing in Medicine and Biology Symposium (SPMB), Philadelphia, PA, USA, 5 December 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Xavier, K.L.B.L.; Nanayakkara, V.K. Development of an early fire detection technique using a passive infrared sensor and deep neural networks. Fire Technol. 2022, 58, 3529–3552. [Google Scholar] [CrossRef]
- Hitiyise, E.; Ntagwirumugara, E.; Habarurema, W.; Ingabire, W.; Gasore, G. Building Occupancy Monitoring Based on Microcontroller and PIR Sensors. Int. J. Appl. Eng. Res. 2016, 11, 10414–10419. [Google Scholar]
- Udrea, I.; Simion, N.D.; Alionte, C.G.; Ionut, V.; Gheorghe, V.F.K.; Petrache, S. Counting Versus Detection in an FM Application that Deals with Rooms Reservation; IBIMA Publishing: King Of Prussia, PA, USA, 2022. [Google Scholar]
- Khan, D.S.; Kolarik, J.; Hviid, C.A.; Weitzmann, P. Method for long-term mapping of occupancy patterns in open-plan and single office spaces by using passive-infrared (PIR) sensors mounted below desks. Energy Build. 2021, 230, 110534. [Google Scholar] [CrossRef]
- Masciadri, A.; Lin, C.; Comai, S.; Salice, F. A Multi-Resident Number Estimation Method for Smart Homes. Sensors 2022, 22, 4823. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Cook, D.J. sMRT: Multi-resident tracking in smart homes with sensor vectorization. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 43, 2809–2821. [Google Scholar] [CrossRef] [PubMed]
- Akhter, F.; Khadivizand, S.; Lodyga, J.; Siddiquei, H.R.; Alahi, M.E.E.; Mukhopadhyay, S. Design and development of an IoT enabled pedestrian counting and environmental monitoring system for a smart city. In Proceedings of the 2019 13th International Conference on Sensing Technology (ICST), Sydney, Australia, 2–4 December 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Zhang, X.; Zhou, T.; Kokogiannakis, G.; Xia, L.; Wang, C. Estimating the number of occupants and activity intensity in large spaces with environmental sensors. Build. Environ. 2023, 243, 110714. [Google Scholar] [CrossRef]
- Tsou, P.R.; Wu, C.E.; Chen, Y.R.; Ho, Y.T.; Chang, J.K.; Tsai, H.P. Counting people by using convolutional neural network and a PIR array. In Proceedings of the 2020 21st IEEE International Conference on Mobile Data Management (MDM), Versailles, France, 30 June–3 July 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 342–347. [Google Scholar]
- Liu, X.; Yang, T.; Tang, S.; Guo, P.; Niu, J. From relative azimuth to absolute location: Pushing the limit of PIR sensor based localization. In Proceedings of the 26th Annual International Conference on Mobile Computing and Networking, London, UK, 21–25 September 2020; pp. 1–14. [Google Scholar]
- Raykov, Y.P.; Ozer, E.; Dasika, G.; Boukouvalas, A.; Little, M.A. Predicting room occupancy with a single passive infrared (PIR) sensor through behavior extraction. In Proceedings of the 2016 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Heidelberg, Germany, 12–16 September 2016; pp. 1016–1027. [Google Scholar]
- Andrews, J.; Kowsika, M.; Vakil, A.; Li, J. A motion induced passive infrared (PIR) sensor for stationary human occupancy detection. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 1295–1304. [Google Scholar]
- Giaretta, A.; Loutfi, A. On the people counting problem in smart homes: Undirected graphs and theoretical lower-bounds. J. Ambient. Intell. Humaniz. Comput. 2021, 14, 3839–3851. [Google Scholar] [CrossRef]
- Leech, C.; Raykov, Y.P.; Ozer, E.; Merrett, G.V. Real-time room occupancy estimation with Bayesian machine learning using a single PIR sensor and microcontroller. In Proceedings of the 2017 IEEE Sensors Applications Symposium (SAS), Glassboro, NJ, USA, 13–15 March 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Yang, B.; Luo, J.; Liu, Q. A novel low-cost and small-size human tracking system with pyroelectric infrared sensor mesh network. Infrared Phys. Technol. 2014, 63, 147–156. [Google Scholar] [CrossRef]
- Yang, B.; Li, X.; Luo, J. A novel multi-human location method for distributed binary pyroelectric infrared sensor tracking system: Region partition using PNN and bearing-crossing location. Infrared Phys. Technol. 2015, 68, 35–43. [Google Scholar] [CrossRef]
- Yang, B.; Lei, Y.; Yan, B. Distributed multi-human location algorithm using naive bayes classifier for a binary pyroelectric infrared sensor tracking system. IEEE Sens. J. 2015, 16, 216–223. [Google Scholar] [CrossRef]
- Yang, B.; Wei, Q.; Zhang, M. Multiple human location in a distributed binary pyroelectric infrared sensor network. Infrared Phys. Technol. 2017, 85, 216–224. [Google Scholar] [CrossRef]
- Yuan, L.; Yang, B.; Wei, Q. Human indoor location for binary infrared sensor tracking system: On improved credit and dynamic pruning algorithm. ISA Trans. 2019, 94, 370–378. [Google Scholar] [CrossRef] [PubMed]
- Lu, J.; Zhang, T.; Hu, F.; Hao, Q. Preprocessing design in pyroelectric infrared sensor-based human-tracking system: On sensor selection and calibration. IEEE Trans. Syst. Man, Cybern. Syst. 2016, 47, 263–275. [Google Scholar] [CrossRef]
- Zade, N.; Deshpande, S.; Kamatchi Iyer, R. Target tracking based on approximate localization technique in deterministic directional passive sensor network. J. Ambient. Intell. Humaniz. Comput. 2021, 12, 10171–10181. [Google Scholar] [CrossRef]
- Yang, D.; Xu, B.; Rao, K.; Sheng, W. Passive infrared (PIR)-based indoor position tracking for smart homes using accessibility maps and a-star algorithm. Sensors 2018, 18, 332. [Google Scholar] [CrossRef]
- Yang, D.; Sheng, W.; Zeng, R. Indoor human localization using PIR sensors and accessibility map. In Proceedings of the 2015 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Shenyang, China, 8–12 June 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 577–581. [Google Scholar]
- Henni, A.H.; Bachouch, R.B.; Bennis, O.; Ramdani, N. Enhanced multiplex binary PIR localization using the transferable belief model. IEEE Sens. J. 2019, 19, 8146–8159. [Google Scholar] [CrossRef]
- Ciuffreda, I.; Casaccia, S.; Revel, G.M. Localization of Older People in an Indoor Scenario: A Measurement System Based on PIR Sensors Installed in a Social Robot. In Proceedings of the 2023 IEEE International Workshop on Metrology for Living Environment (MetroLivEnv), Milano, Italy, 29–31 May 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 208–212. [Google Scholar]
- Yang, B.; Zhang, M. Credit-based multiple human location for passive binary pyroelectric infrared sensor tracking system: Free from region partition and classifier. IEEE Sens. J. 2016, 17, 37–45. [Google Scholar] [CrossRef]
- Chen, X.Y.; Wen, C.Y.; Sethares, W.A. Multi-target PIR indoor localization and tracking system with artificial intelligence. Sensors 2022, 22, 9450. [Google Scholar] [CrossRef]
- Yang, T.; Guo, P.; Liu, W.; Liu, X.; Hao, T. A Deep-learning-based Method for PIR-based Multi-person Localization. arXiv 2020, arXiv:2004.04329. [Google Scholar]
- Yang, T.; Guo, P.; Liu, W.; Liu, X. DeepPIRATES: Enabling Deployment-Independent Supervised PIR-Based Localization. In Proceedings of the 2020 3rd International Conference on Mechatronics, Robotics and Automation (ICMRA), Wuhan, China, 20–22 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 151–156. [Google Scholar]
- Ngamakeur, K.; Yongchareon, S.; Yu, J.; Islam, S. Passive infrared sensor dataset and deep learning models for device-free indoor localization and tracking. Pervasive Mob. Comput. 2022, 88, 101721. [Google Scholar] [CrossRef]
- Ngamakeur, K.; Yongchareon, S.; Yu, J.; Sheng, Q.Z. Deep cnn-lstm network for indoor location estimation using analog signals of passive infrared sensors. IEEE Internet Things J. 2022, 9, 22582–22594. [Google Scholar] [CrossRef]
- Yang, T.; Liu, X.; Tang, S.; Niu, J.; Guo, P. A new PIR-based method for real-time tracking. arXiv 2019, arXiv:1901.10700. [Google Scholar]
- Lai, K.C.; Ku, B.H.; Wen, C.Y. Using cooperative PIR sensing for human indoor localization. In Proceedings of the 2018 27th Wireless and Optical Communication Conference (WOCC), Hualien, Taiwan, 30 April–1 May 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–5. [Google Scholar]
- Luo, X.; Liu, T.; Shen, B.; Gao, L.; Luo, X. Human indoor localization based on ceiling mounted PIR sensor nodes. In Proceedings of the 2016 13th IEEE Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 9–12 January 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 868–874. [Google Scholar]
- Wu, C.M.; Chen, X.Y.; Wen, C.Y.; Sethares, W.A. Cooperative networked PIR detection system for indoor human localization. Sensors 2021, 21, 6180. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Li, D.; Cheng, Y.; Liu, G.; Niu, J.; Su, L. Demonstration abstract: A novel human tracking and localization system based on pyroelectric infrared sensors. In Proceedings of the 2016 15th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN), Vienna, Austria, 11–14 April 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–2. [Google Scholar]
- Lu, J.; Zhang, T.; Sun, Q.; Hao, Q.; Hu, F. Binary compressive tracking. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1755–1768. [Google Scholar] [CrossRef]
- Fanti, M.P.; Faraut, G.; Lesage, J.J.; Roccotelli, M. An integrated framework for binary sensor placement and inhabitants location tracking. IEEE Trans. Syst. Man Cybern. Syst. 2016, 48, 154–160. [Google Scholar] [CrossRef]
- Narayana, S.; Prasad, R.V.; Rao, V.S.; Prabhakar, T.V.; Kowshik, S.S.; Iyer, M.S. PIR sensors: Characterization and novel localization technique. In Proceedings of the 14th International Conference on Information Processing in Sensor Networks, Seattle, WA, USA, 14–16 April 2015; pp. 142–153. [Google Scholar]
- Yunus, M.H.; Nawawi, S.W.; Hashim, M.A. Multiple Detections Application for Indoor Tracking Using PIR Sensor and Kalman Filter. ELEKTRIKA-J. Electr. Eng. 2021, 20, 7–12. [Google Scholar]
- De, P.; Chatterjee, A.; Rakshit, A. Regularized K-SVD-based dictionary learning approaches for PIR sensor-based detection of human movement direction. IEEE Sens. J. 2020, 21, 6459–6467. [Google Scholar] [CrossRef]
- De, P.; Chatterjee, A.; Rakshit, A. Label Consistency-based Modified Sequential Dictionary Learning-based Approach for PIR Sensor-based Detection of Human Movement Direction. In Proceedings of the International Conference on Computational Intelligence in Pattern Recognition, Howrah, India, 23–24 April 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 183–195. [Google Scholar]
- Yun, J.; Woo, J. A comparative analysis of deep learning and machine learning on detecting movement directions using PIR sensors. IEEE Internet Things J. 2019, 7, 2855–2868. [Google Scholar] [CrossRef]
- Yun, J.; Kim, D.; Kim, D.M.; Song, T.; Woo, J. GAN-based sensor data augmentation: Application for counting moving people and detecting directions using PIR sensors. Eng. Appl. Artif. Intell. 2023, 117, 105508. [Google Scholar] [CrossRef]
- Umutoni, R.M.; Ogore, M.; Hanyurwimfura, D.; Nsenga, J. Integrating Analog PIR Sensor Telemetry with TinyML Inference for On-The-Edge Classification of Moving Objects. In Proceedings of the International Congress on Information and Communication Technology, London, UK, 20–23 February 2023; Springer: Berlin/Heidelberg, Germany, 2023; pp. 405–415. [Google Scholar]
- Kashimoto, Y.; Hata, K.; Suwa, H.; Fujimoto, M.; Arakawa, Y.; Shigezumi, T.; Komiya, K.; Konishi, K.; Yasumoto, K. Low-cost and device-free activity recognition system with energy harvesting PIR and door sensors. In Proceedings of the Adjunct Proceedings of the 13th International Conference on Mobile and Ubiquitous Systems: Computing Networking and Services, Hiroshima, Japan, 28 November–1 December 2016; pp. 6–11. [Google Scholar]
- Lameski, P.; Dimitrievski, A.; Zdravevski, E.; Trajkovik, V.; Koceski, S. Challenges in data collection in real-world environments for activity recognition. In Proceedings of the IEEE EUROCON 2019-18th International Conference on Smart Technologies, Novi Sad, Serbia, 1–4 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar]
- Gochoo, M.; Tan, T.H.; Huang, S.C.; Liu, S.H.; Alnajjar, F.S. DCNN-based elderly activity recognition using binary sensors. In Proceedings of the 2017 International Conference on Electrical and Computing Technologies and Applications (ICECTA), Ras Al Khaimah, United Arab Emirates, 21–23 November 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–5. [Google Scholar]
- Gochoo, M.; Tan, T.H.; Liu, S.H.; Jean, F.R.; Alnajjar, F.S.; Huang, S.C. Unobtrusive activity recognition of elderly people living alone using anonymous binary sensors and DCNN. IEEE J. Biomed. Health Inform. 2018, 23, 693–702. [Google Scholar] [CrossRef] [PubMed]
- Yatbaz, H.Y.; Eraslan, S.; Yesilada, Y.; Ever, E. Activity recognition using binary sensors for elderly people living alone: Scanpath trend analysis approach. IEEE Sens. J. 2019, 19, 7575–7582. [Google Scholar] [CrossRef]
- Gochoo, M.; Tan, T.H.; Velusamy, V.; Liu, S.H.; Bayanduuren, D.; Huang, S.C. Device-free non-privacy invasive classification of elderly travel patterns in a smart house using PIR sensors and DCNN. IEEE Sens. J. 2017, 18, 390–400. [Google Scholar] [CrossRef]
- Tan, T.H.; Badarch, L.; Zeng, W.X.; Gochoo, M.; Alnajjar, F.S.; Hsieh, J.W. Binary sensors-based privacy-preserved activity recognition of elderly living alone using an RNN. Sensors 2021, 21, 5371. [Google Scholar] [CrossRef] [PubMed]
- Rajesh, P.; Kavitha, R. Elderly people activity monitoring with involved binary sensors and Deep Convolution Neural Network. Neural Comput. Appl. 2022, 34, 16605–16615. [Google Scholar] [CrossRef]
- Xu, Z.; Wang, G.; Guo, X. Sensor-based activity recognition of solitary elderly via stigmergy and two-layer framework. Eng. Appl. Artif. Intell. 2020, 95, 103859. [Google Scholar] [CrossRef]
- Zhang, J.; Zhao, T.; Zhou, X.; Wang, J.; Zhang, X.; Qin, C.; Luo, M. Room zonal location and activity intensity recognition model for residential occupant using passive-infrared sensors and machine learning. In Building Simulation; Springer: Berlin/Heidelberg, Germany, 2022; Volume 15, pp. 1133–1144. [Google Scholar]
- Hwang, Y.M.; Park, S.; Lee, H.O.; Ko, S.K.; Lee, B.T. Deep Learning for human activity recognition based on causality feature extraction. IEEE Access 2021, 9, 112257–112275. [Google Scholar] [CrossRef]
- Ghosh, M.; Choudhury, S. An Online Activity Monitoring for Geriatric Care Using Ambient Sensors. SN Comput. Sci. 2022, 3, 339. [Google Scholar] [CrossRef]
- Jarraya, A.; Bouzeghoub, A.; Borgi, A.; Arour, K. DCR: A new distributed model for human activity recognition in smart homes. Expert Syst. Appl. 2020, 140, 112849. [Google Scholar] [CrossRef]
- Eisa, S.; Moreira, A. A behaviour monitoring system (BMS) for ambient assisted living. Sensors 2017, 17, 1946. [Google Scholar] [CrossRef]
- Nazerfard, E.; Atashgahy, Z.; Nadali, A. Abnormal Activity Detection for the Elderly People Using ConvLSTM Autoencoder. 2021. Available online: https://www.researchsquare.com/article/rs-693084/v1 (accessed on 24 January 2024).
- Xu, Z.; Wang, G.; Guo, X. Event-driven daily activity recognition with enhanced emergent modeling. Pattern Recognit. 2023, 135, 109149. [Google Scholar] [CrossRef]
- Fakhruddin, R.I.; Abdurohman, M.; Putrada, A.G. Improving pir sensor network-based activity recognition with pca and knn. In Proceedings of the 2021 International Conference on Intelligent Cybernetics Technology & Applications (ICICyTA), Virtual, 1–2 December 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 138–143. [Google Scholar]
- Utsumi, T.; Hashimoto, M. A Walking Speed Measurement System Using PIR Sensors for Early Detection of Pre-Frailty. In Proceedings of the 2021 13th Biomedical Engineering International Conference (BMEiCON), Virtual, 19–21 November 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–5. [Google Scholar]
- Fahad, L.G.; Tahir, S.F.; Rajarajan, M. Activity recognition in smart homes using clustering based classification. In Proceedings of the 2014 22nd International Conference on Pattern Recognition, Stockholm, Sweden, 24–28 August 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1348–1353. [Google Scholar]
- Moshtaghi, M.; Zukerman, I.; Russell, R.A. Statistical models for unobtrusively detecting abnormal periods of inactivity in older adults. User Model.-User-Adapt. Interact. 2015, 25, 231–265. [Google Scholar] [CrossRef]
- Luo, X.; Liu, T.; Shen, B.; Hong, J.; Chen, Q.; Chen, H. Human Daily Activity Recognition Using Ceiling Mounted PIR Sensors. In Proceedings of the 2nd International Conference on Advances in Mechanical Engineering and Industrial Informatics (AMEII 2016), Hangzhou, China, 9–10 April 2016; Volume 73, p. 872. [Google Scholar]
- Guan, Q.; Yin, X.; Guo, X.; Wang, G. A novel infrared motion sensing system for compressive classification of physical activity. IEEE Sens. J. 2016, 16, 2251–2259. [Google Scholar] [CrossRef]
- Luo, X.; Guan, Q.; Tan, H.; Gao, L.; Wang, Z.; Luo, X. Simultaneous indoor tracking and activity recognition using pyroelectric infrared sensors. Sensors 2017, 17, 1738. [Google Scholar] [CrossRef]
- Misaki, S.; Stirapongsasuti, S.; Matsui, T.; Suwa, H.; Yasumoto, K. Activity recognition through intermittent distributed processing by energy harvesting PIR sensors: Demo abstract. In Proceedings of the 18th Conference on Embedded Networked Sensor Systems, Virtual, 16–19 November 2020; pp. 593–594. [Google Scholar]
- Guan, Q.; Li, C.; Qin, L.; Wang, G. Daily activity recognition using pyroelectric infrared sensors and reference structures. IEEE Sens. J. 2018, 19, 1645–1652. [Google Scholar] [CrossRef]
- Liu, T.; Liang, J.; Wan, K.; Liu, J. Action Recognition with PIR Sensor Array and Bidirectional Long Short-term Memory Neural Network. In Proceedings of the 2023 IEEE 9th International Conference on Cloud Computing and Intelligent Systems (CCIS), Dali, China, 12–13 August 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 284–288. [Google Scholar]















| Ref | Year | Main Focus | Occupancy Information Level | ML | Spatial Resolution | Consider PIR Sensors for All Levels of Occupancy Information |
|---|---|---|---|---|---|---|
| [33] | 2012–2022 | Focuses on the application area of occupancy information and sensor fusion based on a PIR sensor | Detection | Yes | Yes | No |
| [22] | 1981–2021 | Focuses on sensor fusion, especially for energy application | Detection and Prediction | Yes | Yes | No |
| [20] | 2020 | Compares different sensors for occupancy information | All | Yes | Yes | No |
| [30] | 2018 | Focuses on a privacy-preserved occupancy monitoring solution for people counting | Counting | No | Yes | No |
| [29] | 2018 | Compares different sensor types for the estimation and detection of occupancy | Counting and Detection | Yes | No | No |
| [34] | 1998–2019 | Examines the benefits and drawbacks of several occupancy detection techniques and provides a framework for comparison to help researchers choose the best sensors and algorithms | Detection | Yes | Yes | No |
| [21] | 2009–2020 | Focuses on occupancy detection for HVAC based on different types of buildings | Detection | Yes | Yes | No |
| [35] | 2009–2021 | Provides an overview of environmental sensors used for occupancy detection/estimation; proposes a technique to calculate | Detection, Counting | Yes | Yes | No |
| [36] | 2012–2021 | Focuses on application (which sensor is good for which application) | Detection, Counting, Identity, Tracking | No | Yes | No |
| [24] | 2009–2020 | Explores forecasting algorithms for occupancy information | Counting, Detection, Location | Yes | Yes | No |
| [37] | 2012–2022 | Conducts human–building interaction research | Counting, Detection, Location, and Tracking | No | Yes | No |
| [32] | 2011–2021 | Provides a selection of occupancy measurement systems for different ranges of people and the occupancy counting accuracy situation of different measurement systems and algorithms | Counting | Yes | No | No |
| [26] | 2020 | Reviews occupancy measurement systems based on different sensors, especially image/video-based methods; analyzes and discusses their applicable scopes and limitations | Detection, Counting, Identity, Track, Location | Yes | No | No |
| [25] | 2023 | Explores sensing within smart buildings | All | No | Yes | No |
| [31] | 2015–2022 | Examines how deep learning and transfer learning methods are used for occupancy detection | Detection | Yes | Yes | No |
| [38] | 2020 | Presents a thorough analysis of device-free developments in indoor localization and tracking in multi-resident environments | Location, Tracking | Yes | Yes | No |
| Our Research | 2015–2023 | Reviews methodologies and machine learning approaches for occupancy information based on PIR sensors | Detection, Counting, Location, Tracking, and Activity | Yes | Yes | Yes |
| (“passive infrared sensor” OR “PIR sensor” OR “infrared sensor”)AND(“occupaäncy” OR “occupant” OR “people estimate*” OR “people activity*” OR “human activity*” OR “people monitor*” OR “people count*” OR “people track*” OR “people movement” OR “people position” OR “people location” OR “people speed” OR “activity detect*” OR “activity recognition*” OR “Movement detection” OR “movement recognition” OR “Tracking detection” OR “tracking recognition” OR “Position detection” OR “Location detection”OR “trajectory detection” OR “Target detection” OR “human count*” OR “Action recognition” OR “indoor activity” OR “building management*” OR “building monitoring*” OR “speed detection*” OR “speed recognition*”) |
| Inclusion Criteria | Exclusion Criteria |
|---|---|
| Articles focusing on only PIR sensors, or where PIR sensors are the primary sensor for people counting, location tracking, and activity monitoring. | Articles are primarily concerned with hardware development or enhancing the sensitivity of PIR sensors. |
| Articles are written in English. | Thesis, books, and preprint studies. |
| Research on occupancy information where PIR sensors play a main sensors. | Studies involving sensor fusion where PIR sensors are not the main sensor. |
| - | Duplicate publication. |
| - | Another type of infrared-based sensor. |
| Aspect | Binary-Based PIR Sensors | Signal-Based PIR Sensors |
|---|---|---|
| Output Type | Binary (On/Off) | Analog signal that varies with infrared intensity |
| Complexity | Simple | Complex |
| Data Provided | Presence or absence of motion | Detailed information like size, speed, and direction of the object |
| Cost | Generally lower | Higher due to more complex processing requirements |
| Power Consumption | Lower | Higher due to continuous signal processing |
| Ease of Implementation | Easier to implement and integrate | Requires more sophisticated setup and calibration |
| Flexibility | Less flexible in terms of information gathering | Highly flexible in terms of the range of information |
| Sensitivity | Less sensitive to minor variations | Highly sensitive to even slight variations |
| Reliability | Reliable for basic people counting and presence detection; may not differentiate well between complex activities or provide precise localization. | Highly reliable for localization and detailed occupancy analysis, including people counting, due to the ability to detect direction and speed of movement. |
| Compatibility | Compatible with simple control systems | May require integration with more advanced systems or data processing units |
| Ref | Output | Location | Spatial Resolution | Type of Activity | Algorithms |
|---|---|---|---|---|---|
| [95] | Binary | 11 PIR (wall), 8 (Door) | Buildings | Eat, Bathroom activity, Sleep, Cook, Clean-up, Living room activity, Work and Study with PC, Go out | Accuracy, Random Forest (62.8%) |
| [96] | Binary | (2 modules each 5) Ceiling | Buildings | Going to bed, Going to the coffee table, Eating, Going to the bathroom, Entering the room, Exiting the Room, | Random Forest, Extremely Randomized Trees, Support Vector Machines (SVM), Naive Bayes, Ada Boost, Logistic regression, and kNN |
| [97] | Binary | 27 (different parts) (4 door sensors) | Buildings | Bed to Toilet, Eating, Meal Preparation, Relax | Average accuracy, DCNN classifier (99.36%) |
| [98] | Binary | 31 (different places) (4 door) | Buildings | Bed to Toilet, Eating, Enter Home, Housekeeping, Leave Home, Meal Preparation, Relax, Sleeping, Work, Wash Dishes | Accuracy, DCNN (99.23%) |
| [99] | Binary | 25 (different places) (4 door) | Buildings | Bed to Toilet, Eating, Enter Home, Housekeeping, Leave Home, Meal Preparation, Relax, Sleeping, Work, Wash Dishes | F1-score, Scanpath Trend Analysis (STA) (86%) |
| [100] | Binary | 27 (different parts) (4 door sensors) | Buildings | Travel Patterns (Direct, Lapping, Pacing, Random) | Accuracy (Naive Bayes (82.51%), one vs. rest (90.46%), KNN (93.25%), Decision Tree (93.58%), SVC (93.81%), Gradient Boost (94.06%), Random Forest (94.48%), DCNN (97.84%)) |
| [101] | Binary | 27 (different parts) (4 door sensors) | Buildings | Bed to Toilet, Eating, Enter Home, Housekeeping, Leave Home, Meal Preparation, Relax, Sleeping, Work, Wash Dishes | Accuracy, RNN (98.148%) |
| [102] | Binary | 27 (different parts) (4 door sensors) | Buildings | Get House, Leave House, Take Food, Bed to Washroom, Rest, Food Preparation, Sleep, Work, House Cleaning, Washing Utensils, Simple Exercise, Pick Objects | Accuracy, DCNN (98.68%) |
| [103] | Binary | 31 (different places) (4 door) | Buildings | Meal Preparation, Relax, Eating, Work, Sleeping, Wash Dishes, Bed to Toilet, Enter Home, Leave Home, Housekeeping | Accuracy, AdaBoost (98%) |
| [104] | Binary | 16 (wall) | Room | Heavy, medium, light, and resting activities | Accuracy, SVM (99.7%) |
| [105] | Binary | 31 (different places) (4 door) | Buildings | Bed to Toilet, Eating, Enter Home, Housekeeping, Leave Home, Meal Preparation, Relax, Sleeping, Work, Wash Dishes | F1 scores, DeepLSTM (90.3%), Deep 2D-CNN (90.8%), Deep 2D-CNNLSTM (91.9%) |
| [106] | Binary | 31 (different places) (4 door) | Building | Sleeping, Bed to Toilet, Meal Preparation, Relax, Eating, Wash Dishes, Work | Average Precision, Online Event-Based Activity Discovery (87%) |
| [107] | Binary | 31 (different place) (4 door) | Buildings | 10 Activities | Accuracy, DCR-OL 82.23% |
| [108] | Binary | 31 (different place) | Building | OverSleeping, LessSleeping, NotBackHome, Dead | Accuracy, Rule-based Anomaly Classification (72.93%) |
| [109] | Binary | 31 (different place) (4 door) | Buildings | Repetition, Disturbance in sleep, and Confusion | Accuracy, ConvLSTM AE (90.3%), LSTM AE (89%), LSTM (81%), OCSVM (70%) |
| [110] | Binary | 31 (different place) (4 door) | Buildings | Meal Preparation, Relax, Eating, Work, Sleeping, Wash Dishes, Bed to Toilet, Enter Home, Leave Home, Housekeeping | Accuracy, marker-based stigmergy and a Directed-weighted Network (DwN) (96.69%) |
| [111] | Binary | 4 Wall | Buildings | Washing Dish, Resting, Eating, Resting while Eating, Cooking | Accuracy, PCA-KNN (94%) |
| Ref | Output | Location | Spatial Resolution | Type of Activity | Algorithms |
|---|---|---|---|---|---|
| [117] | Signal | 9 Ceiling (near together) | Room | Walking, Sitting, Lying, Standing, Transitional | Accuracy, First layer RF (0.82), Second layer RF (0.93), SVM (0.79), Naive Bayes (0.66) |
| [48] | Signal | 2 (Ceiling, Corner) | Room | Eat, Working with PC, Reading, Smartphone | Precision, Random Forest (64.7%) |
| [118] | Signal | 4 (Wall), 1 (Ceiling) in each room | Buildings | Bath Room (absence, Stationary, toothbrushing, using laundry, washing hands), Bed Room (absence, changing clothes, sleeping, stationary), Living room (absence, eating, reading, stationary, writing), Kitchen (absence, cutting, frying, stationary, using fridge) | Average accuracy, Random Forest (over 90%) |
| [115] | Signal | 1 (Ceiling) | One room | Fall, Sit down, Stand up, Walk, Run | Average accuracy, GMM-HMM (86.2%) |
| [116] | Signal | (3 modules each 4), 1 Ceiling, 2 Sides of person | Room | Walk, Run, walk with payload, Walk while waving right hand, Walk with a squat-standing, Fall | Accuracy, KNN (74.38%), GM-HMM (96.67%), Naive Bayes (85.42%), SVM (Linear kernel) (97.71%), SVM (multinomial kernel) (96%), SVM (RBF) (85.63%) |
| [119] | Signal | (4 modules each 4) one ceiling, 3 sides of person | Room | Normal walk, fast walk, sit down, squat-standing, fall | Accuracy, GM-HMMs (91.6%) |
| [120] | Signal | 5 (bar near wall) | Room | Walking (93%), Jogging (97%), Crouching down (97%), Squatting up (100%), Sitting (65%), Standing Up (95%), Falling action (100%) | Accuracy, LSTM (92.42%) |
| [40] | Signal | 4 Ceiling | Room | Anomaly activity | Accuracy, LC-MCAS-DL (93.55%) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shokrollahi, A.; Persson, J.A.; Malekian, R.; Sarkheyli-Hägele, A.; Karlsson, F. Passive Infrared Sensor-Based Occupancy Monitoring in Smart Buildings: A Review of Methodologies and Machine Learning Approaches. Sensors 2024, 24, 1533. https://doi.org/10.3390/s24051533
Shokrollahi A, Persson JA, Malekian R, Sarkheyli-Hägele A, Karlsson F. Passive Infrared Sensor-Based Occupancy Monitoring in Smart Buildings: A Review of Methodologies and Machine Learning Approaches. Sensors. 2024; 24(5):1533. https://doi.org/10.3390/s24051533
Chicago/Turabian StyleShokrollahi, Azad, Jan A. Persson, Reza Malekian, Arezoo Sarkheyli-Hägele, and Fredrik Karlsson. 2024. "Passive Infrared Sensor-Based Occupancy Monitoring in Smart Buildings: A Review of Methodologies and Machine Learning Approaches" Sensors 24, no. 5: 1533. https://doi.org/10.3390/s24051533