
A Novel Framed Slotted Aloha Medium Access Control Protocol Based on Capture Effect in Vehicular Ad Hoc Networks

Abstract
:1. Introduction
- The closed-form expression for the acquisition probability is derived in the context of a Rician fading channel.
- The paper presents an FSA MAC protocol model based on the capture effect and conducts an analysis of the impact of vehicle quantity and slot allocation on the success rate of vehicle access channels.
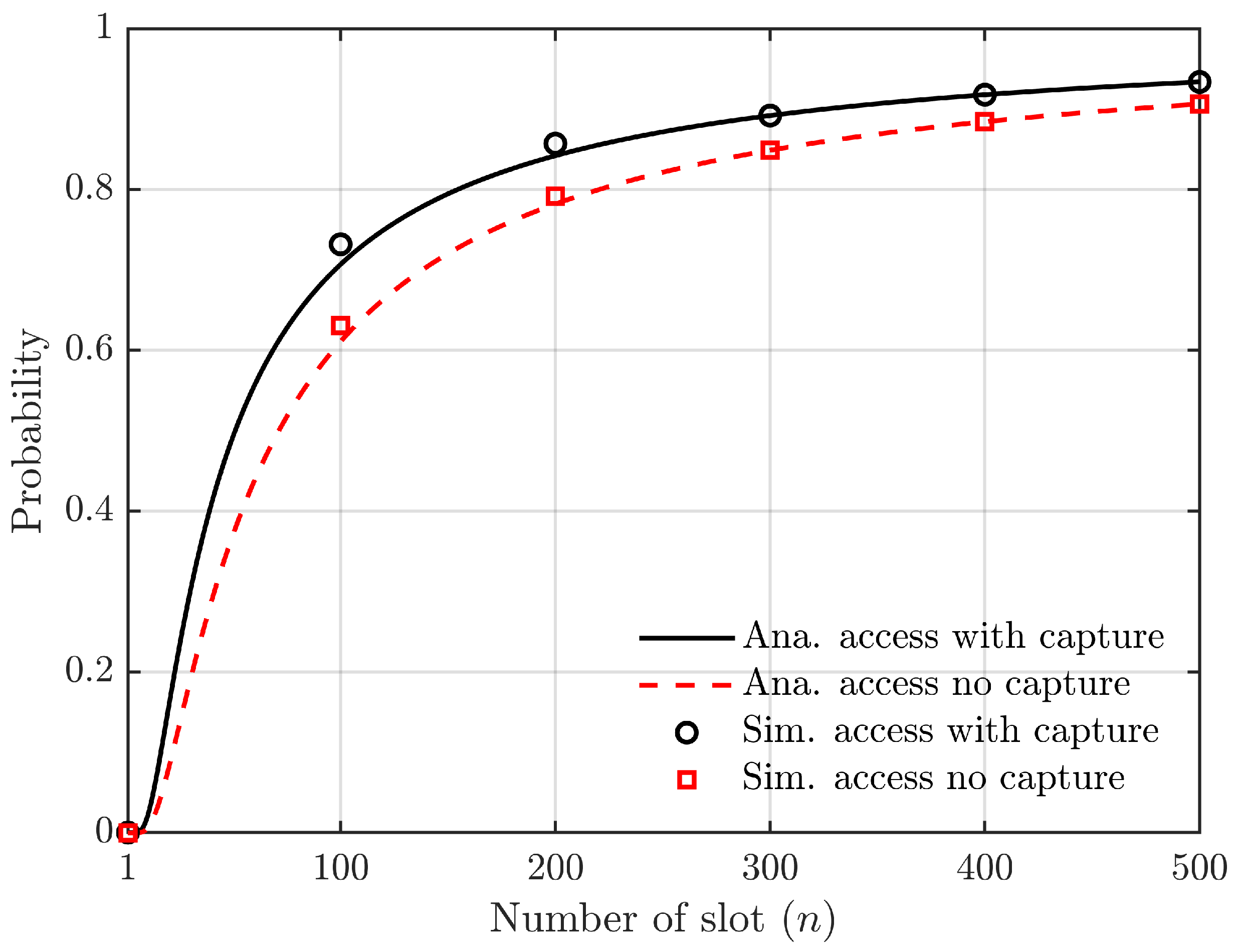
- The impact of the capture effect on the success rate of the vehicle access channel is analyzed, and the numerical results validate the accuracy of the theoretical analysis.
- The relationship between the number of vehicles and time slot allocation under maximum conflict probability is derived, providing a foundation for the rational distribution of time slots.
- Under the constraint of a vehicle access channel success probability, this paper derives the requirements for slot number, access times, and transmission power. Taking into account comprehensive factors, an implementation method is proposed to comprehensively enhance the success rate of vehicle access channels from these three aspects.
2. Related Work
3. Capture Probability of Rician Fading Channel
4. System Model and Access Probability
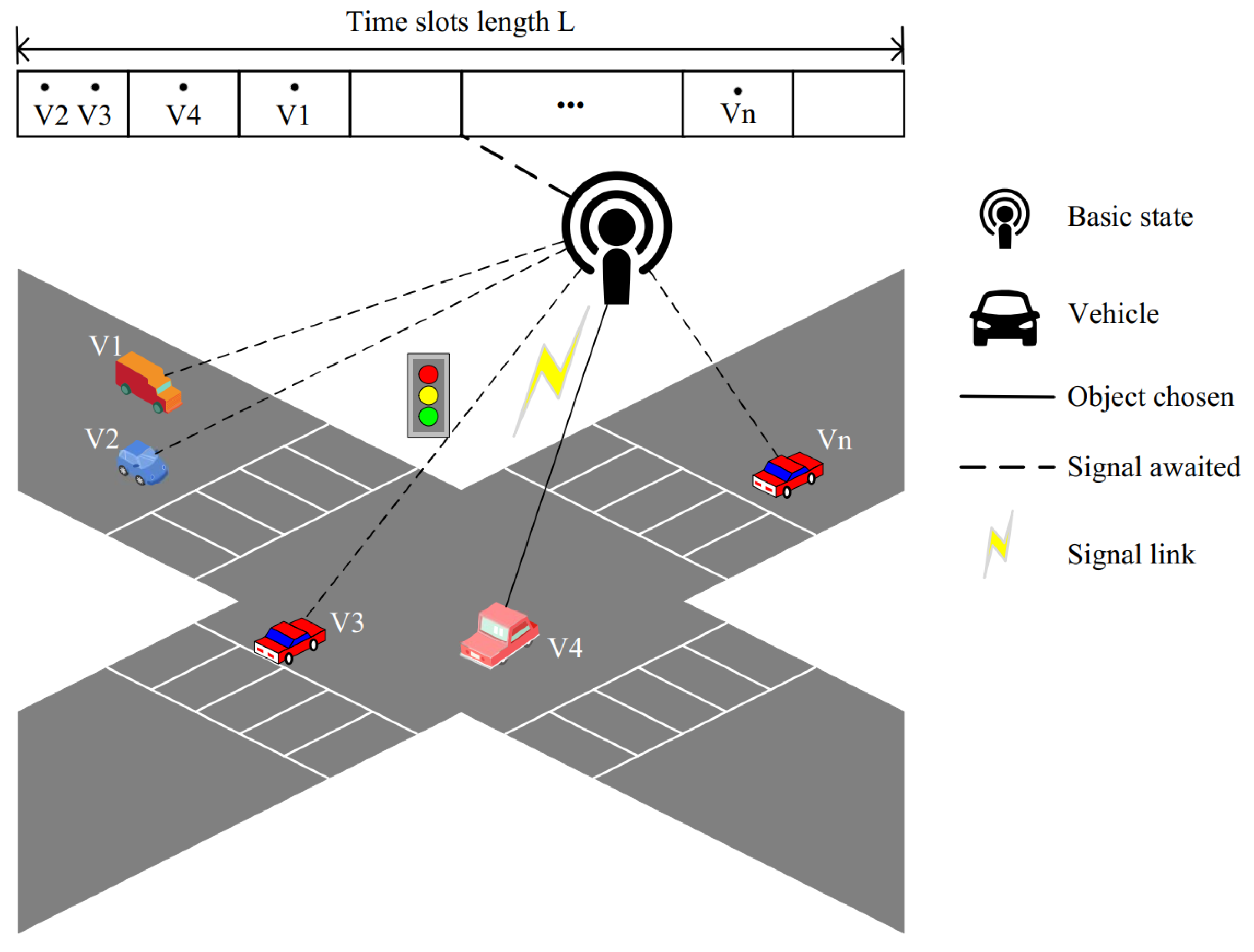
4.1. Access Model Description
4.2. Access Success and Conflict Probability without Considering Capture Effect
4.3. Access Success and Failure Probability When Considering Capture Effect
4.4. Access Methods When Access Probability Constraints
4.4.1. Increase the Number of Access Slots to Improve the Success Rate of Vehicle Access
4.4.2. Improving the Success Rate of Vehicle Access in VANETs by Increasing the Access Times
4.4.3. Revising the Vehicle Transmission Power to Enhance the Capture Probability and Thereby Improve the Success Rate of Vehicle Access
4.4.4. Access Method Subject to Constraints on Access Probability
5. Simulation
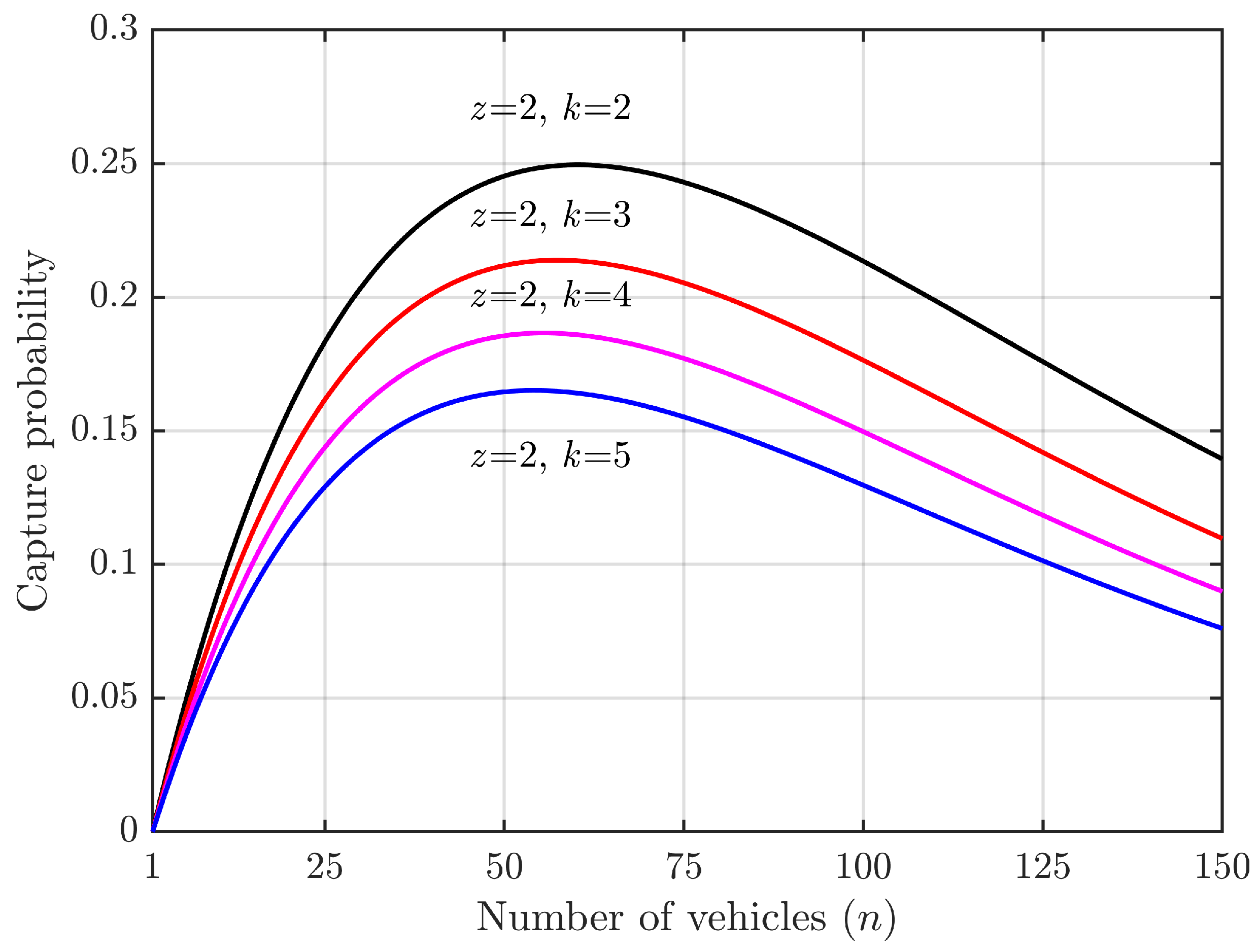
5.1. Simulation of Capture Effect
5.2. Simulation of the Model
5.3. Simulation of Performance
5.3.1. Time Responsiveness
5.3.2. Selection of Parameters under the Constraint of Successfully Accessing Probability
- (1)
- Increase the number of access slots to improve the success rate of vehicle access.
- (2)
- Increase access times to improve vehicle access success rate.
- (3)
- Enhance the transmission power to elevate the success rate of vehicle access by augmenting the capture probability.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Baccelli, F.; Blaszczyszyn, B.; Muhlethaler, P. An Aloha protocol for multihop mobile wireless networks. IEEE Trans. Inf. Theory 2006, 52, 421–436. [Google Scholar] [CrossRef]
- Borgonovo, F.; Capone, A.; Cesana, M.; Fratta, L. ADHOC MAC: New MAC Architecture for Ad Hoc Networks Providing Efficient and Reliable Point-to-Point and Broadcast Services. Wirel. Netw. 2004, 10, 359–366. [Google Scholar] [CrossRef]
- Han, C.; Dianati, M.; Tafazolli, R.; Liu, X.; Shen, X. A Novel Distributed Asynchronous Multichannel MAC Scheme for Large-Scale Vehicular Ad Hoc Networks. IEEE Trans. Veh. Technol. 2012, 61, 3125–3138. [Google Scholar] [CrossRef]
- Wang, Y.; Shi, J.; Chen, L.; Lu, B.; Yang, Q. A Novel Capture-Aware TDMA-Based MAC Protocol for Safety Messages Broadcast in Vehicular Ad Hoc Networks. IEEE Access 2019, 7, 116542–116554. [Google Scholar] [CrossRef]
- Choi, S.S.; Kim, S. A dynamic framed slotted aloha algorithm using collision factor for RFID identification. IEICE Trans. Commun. 2009, 92, 1023–1026. [Google Scholar] [CrossRef]
- Ferreira, H.P.A.; Assis, F.M.D.; Serres, A.R. A Novel RFID Method for Faster Convergence of Tag Estimation on Dynamic Frame Size ALOHA Algorithms. IET Commun. 2019, 13, 1218–1224. [Google Scholar] [CrossRef]
- Cassará, P.; Cola, T.D.; Gotta, A. A Statistical Framework for Performance Analysis of Diversity Framed Slotted Aloha With Interference Cancellation. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 4327–4337. [Google Scholar] [CrossRef]
- Wang, Y.; Shi, J.; Chen, L. Capture Effect in the FSA-Based Networks under Rayleigh, Rician and Nakagami-m Fading Channels. Appl. Sci. 2018, 8, 414. [Google Scholar] [CrossRef]
- Hadzi-Velkov, Z.; Spasenovski, B. Capture effect in IEEE 802.11 basic service area under influence of Rayleigh fading and near/far effect. In Proceedings of the 13th IEEE International Symposium on Personal, Indoor and Mobile Radio Communications, Lisbon, Portugal, 18 September 2002; Volume 1, pp. 172–176. [Google Scholar]
- Tian, N.; Cai, X.; Cheng, J.; Yue, W.; Luo, M. Short-Packet Transmission in Irregular Repetition Slotted ALOHA System over the Rayleigh Fading Channel. Int. J. Pattern Recognit. Artif. Intell. 2022, 36, 2259016. [Google Scholar] [CrossRef]
- Pejoski, S.; Hadzi-Velkov, Z. Slotted ALOHA Wireless Networks with RF Energy Harvesting in Nakagami-m Fading. Ad Hoc Netw. 2020, 107, 102235. [Google Scholar] [CrossRef]
- Yue, Z.; Yang, H.H.; Zhang, M.; Pappas, N. Age of Information Under Frame Slotted ALOHA-Based Status Updating Protocol. IEEE J. Sel. Areas Commun. 2023, 41, 2071–2089. [Google Scholar] [CrossRef]
- Sun, M.; Guo, Y.; Zhang, D.; Jiang, M.M. Anonymous Authentication and Key Agreement Scheme Combining the Group Key for Vehicular Ad Hoc Networks. Complexity 2021, 2021, 5526412. [Google Scholar] [CrossRef]
- Qiong, W.; Shuai, S.; Ziyang, W.; Qiang, F.; Pingyi, F.; Cui, Z. Towards V2I Age-aware Fairness Access: A DQN Based Intelligent Vehicular Node Training and Test Method. Chin. J. Electron. 2023, 32, 1230–1244. [Google Scholar] [CrossRef]
- Akyıldız, T.; Ku, R.; Harder, N.; Ebrahimi, N.; Mahdavifar, H. ML-Aided Collision Recovery for UHF-RFID Systems. In Proceedings of the 2022 IEEE International Conference on RFID (RFID), Las Vegas, NV, USA, 17–19 May 2022; pp. 41–46. [Google Scholar]
- Yu, J.; Zhang, P.; Chen, L.; Liu, J.; An, J. Stabilizing Frame Slotted Aloha Based IoT Systems: A Geometric Ergodicity Perspective. IEEE J. Sel. Areas Commun. 2020, 39, 714–725. [Google Scholar] [CrossRef]
- Bacco, M.; Cassara, P.; Gotta, A.; Cola, T.D. Diversity Framed Slotted Aloha with Interference Cancellation for Maritime Satellite Communications. In Proceedings of the ICC 2019–2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar]
- Rajeswar, R.G.; Ramanathan, R. An Empirical study on MAC layer in IEEE 802.11p/WAVE based Vehicular Ad hoc Networks. Procedia Comput. Sci. 2018, 143, 720–727. [Google Scholar]
- Liu, J.X.; Ding, S.B.; Zhang, L.; Xie, X.P. Event-driven intermittent control for vehicle platooning over vehicular ad hoc networks. Int. J. Robust Nonlinear Control 2023, 33, 1214–1230. [Google Scholar] [CrossRef]
- Shah, A.F.M.S.; Ilhan, H.; Tureli, U. Modeling and Performance Analysis of the IEEE 802.11 MAC for VANETs under Capture Effect. In Proceedings of the 2019 IEEE 20th Wireless and Microwave Technology Conference (WAMICON), Cocoa Beach, FL, USA, 8–9 April 2019; pp. 1–5. [Google Scholar]
- Menouar, H.; Yagoubi, M.B.; Ouladdjedid, L.K. CSSA MAC: Carrier sense with slotted-Aloha multiple access MAC in vehicular network. Int. J. Veh. Inf. Commun. Syst. 2018, 3, 336–354. [Google Scholar]
- Chowdhury, M.S.; Ullah, N.; Al Ameen, M.; Kwak, K.S. Framed slotted aloha based MAC protocol for low energy critical infrastructure monitoring networks. Int. J. Commun. Syst. 2015, 27, 1783–1797. [Google Scholar] [CrossRef]
- Kim, Y.; Lee, M.; Lee, T.J. Coordinated Multichannel MAC Protocol for Vehicular Ad Hoc Networks. IEEE Trans. Veh. Technol. 2016, 65, 6508–6517. [Google Scholar] [CrossRef]
- Qi, H.M.; Chen, J.Q.; Yuan, Z.Y.; Fan, L.L. A Low Energy Consumption and Low Delay MAC Protocol Based on Receiver Initiation and Capture Effect in 5G IoT. In Proceedings of the Algorithms and Architectures for Parallel Processing: 21st International Conference, Virtual Event, 3–5 December 2022; pp. 709–723. [Google Scholar]
- Jeong, J.; Choi, S.; Yoo, J.; Lee, S.; Kim, C.K. Physical layer capture aware MAC for WLANs. Wirel. Netw. 2013, 19, 533–546. [Google Scholar] [CrossRef]
- Sanchez-Garcia, J.; Smith, D.R. Capture probability in Rician fading channels with power control in the transmitters. Commun. IEEE Trans. 2002, 50, 1889–1891. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| L | N | ||||||
|---|---|---|---|---|---|---|---|
| Extreme conditions | 1 | 1 | 1 | 0 | 0 | 0 | 0 |
| 1 | 2 | 0 | 1 | 0 | 0 | 0 | |
| 1 | 3 | 0 | 0 | 1 | 0 | 0 | |
| 2 | 1 | 1 | 0 | 0 | 0 | 0 | |
| 2 | 2 | 0.50 | 0.50 | 0 | 0 | 0 | |
| 2 | 3 | 0.25 | 0.50 | 0.25 | 0 | 0 | |
| More vehicles with fewer slots | 10 | 15 | 0.22877 | 0.35586 | 0.25701 | 0.11423 | 0.04413 |
| 10 | 20 | 0.13509 | 0.28518 | 0.28518 | 0.17956 | 0.11500 | |
| 10 | 25 | 0.07977 | 0.21271 | 0.27180 | 0.22146 | 0.21426 | |
| Fewer vehicles with more slots | 30 | 15 | 0.62212 | 0.30033 | 0.06732 | 0.009285 | 0.00095 |
| 30 | 20 | 0.52512 | 0.34404 | 0.10677 | 0.020864 | 0.003201 | |
| 30 | 25 | 0.44324 | 0.36682 | 0.14546 | 0.036784 | 0.007688 | |
| General conditions | 50 | 40 | 0.45480 | 0.36198 | 0.14036 | 0.035329 | 0.007534 |
| 50 | 50 | 0.37160 | 0.37160 | 0.18201 | 0.058193 | 0.016594 | |
| 50 | 60 | 0.30363 | 0.36559 | 0.21637 | 0.083898 | 0.030516 |
| 20 | 40 | 0.60269 | 8 | 28 | 0.74756 | 3 | 23 | 0.87515 | 1.25220 | 98.7478 |
| 50 | 100 | 0.60501 | 20 | 70 | 0.74993 | 6 | 56 | 0.89753 | 1.01220 | 98.9878 |
| 100 | 200 | 0.60577 | 40 | 140 | 0.75071 | 10 | 110 | 0.91272 | 0.85776 | 99.1422 |
| 200 | 400 | 0.60615 | 79 | 279 | 0.75302 | 20 | 220 | 0.91291 | 0.84713 | 99.1529 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lai, L.; Song, Z.; Xu, W. A Novel Framed Slotted Aloha Medium Access Control Protocol Based on Capture Effect in Vehicular Ad Hoc Networks. Sensors 2024, 24, 992. https://doi.org/10.3390/s24030992
Lai L, Song Z, Xu W. A Novel Framed Slotted Aloha Medium Access Control Protocol Based on Capture Effect in Vehicular Ad Hoc Networks. Sensors. 2024; 24(3):992. https://doi.org/10.3390/s24030992
Chicago/Turabian StyleLai, Lianyou, Zhongzhe Song, and Weijian Xu. 2024. "A Novel Framed Slotted Aloha Medium Access Control Protocol Based on Capture Effect in Vehicular Ad Hoc Networks" Sensors 24, no. 3: 992. https://doi.org/10.3390/s24030992