1. Introduction
In recent years, the formation control problems of multi-agent systems have been extensively studied in various fields; see [
1] and the references therein. Recently, typical perspectives on formation control include the time-varying formation control of multi-agent systems [
2,
3,
4,
5], the rigid formation of multiple robots [
6,
7,
8], the fractional-order-based controller for multi-agent formation [
9], event-based formation control [
10,
11] circle formation control [
12], and game-based formation [
13]. For the formation problem of multi-agent systems, the main task is to design an appropriate distributed controller to drive the agents form the predefined formation shape.
The distributed formation controllers are based on the feedback of either the formation error or the formation error estimation. Compared with the formation error feedback controller, the observer-based control is more practical since it does not require full state measurement of the controller. Most of the existing observer-based formation controllers rely on the exchange of the observer or input information among neighboring agents, which causes high demand for communication channels. To overcome this limitation, the unknown input observer [
14] is introduced to formulate the distributed pure relative output feedback observer and generate the distributed attack-free protocols for the consensus problem of multi-agent systems [
15]. To realize better performance, it is preferable to design appointed-time observers rather than asymptotical convergent ones. In view of this, the distributed appointed-time observers are introduced in [
16], and the pairwise structure [
17,
18] is borrowed therein, which consumes double the calculation costs. Another method to construct the appointed-time observers is the time-varying transformation approach presented in [
19], and the corresponding distributed appointed-time observer is proposed in [
20]. Although the distributed appointed-time observer in [
20] reduces the computational cost compared with those in [
16], the order reduction in the distributed appointed-time observers is far from being completely resolved.
Motivated by the discussions above, this paper focuses on the reduced-order appointed-time observer and the corresponding formation controller design for nonlinear multi-agent systems. The transformation for the pairwise reduced-order appointed-time observer used in [
16] is introduced, which makes it possible to further reduce the order of the designed observer. Following the observer design procedure, a novel transformation-based distributed reduced-order observer is presented, which can realize the appointed-time estimation of the formation error. Based on the proposed appointed-time observer, the distributed formation controller is then designed, where the neural network approximation is introduced with adaptive weighted gain designed to tackle the unknown nonlinearities of the agent dynamics. Theoretical analysis shows that the proposed distributed formation controller can realize the preset formation shape.
The contributions of the paper are at least twofold. Firstly, compared with existing formation results [
4,
5,
6,
7,
8,
10,
11], this paper, for the first time, designs an output-feedback formation controller based on only relative output information, where no observer information transmission is needed during the whole process. Such a design structure has the advantages of reducing communication cost and being free from network attack. Secondly, compared with existing distributed appointed-time observers for multi-agent systems [
16,
20], the appointed-time observer designed in this paper is of a lower order, which decreases the computational cost.
The rest of the paper is organized as follows.
Section 2 formulates the problem.
Section 3 gives the main result of the paper, and
Section 4 presents a simulation example to illustrate the efficiency of the proposed controller.
Section 5 concludes the paper.
Notations. The symbols and represent the sets of all real numbers and complex numbers, respectively. The symbol is the set of n-dimensional real vectors. represents the 2-norm of the matrix M. is the rank of matrix M.
2. Problem Formulation
Consider a distributed formation control problem of a networked system, containing
N agents. The dynamics of the multi-agent systems are given as
where
is the state of the
ith agent,
is the output of the
ith agent,
is the input of agent
i, and
is the unknown nonlinear term satisfying the following assumption.
Assumption 1. The unknown dynamics can be approximately described bywhere is the unknown neural network constant weight matrix; is the known neural network activation function vector; and is the residual error vector with relatively small upper bound, i.e., . Moreover, the neural network activation functions are also bounded. The constant matrices A, B, and C are the dynamic matrix, the input matrix, and the output matrix, respectively.
Assumption 2 ([
16])
. The matrices satisfy- (i)
;
- (ii)
, .
Remark 1. Assumption 2 indicates that the rank of the output matrix C is no less than that of input matrix B, and there is no transmission zero for the agent dynamics. Under Assumption 2, the distributed observer is designed in [16] without using relative input information, where the consensus error of multi-agent systems is successfully estimated at an appointed time. Note that in [16], the pairwise observer structure [17] is used, and the proposed appointed-time observer is of order , which greatly increases the computational cost. To release the calculation burden, the time-varying transformation structure [19] is introduced to formulate the n-order distributed transformation-based appointed-time observer for networked systems [20]. The communication graph among the N agents is described by an undirected graph , where is the node set and is the edge set. An edge is denoted by a pair of nodes corresponding to an information link from agent j to agent j, and node i can have access to the relative output information via its local sensors. For the undirected graph, also means . A path from node to node is an edge sequence with . An undirected graph is connected if for each pair of nodes there exists path from node i to node j. The adjacency matrix is defined as , if and 0 otherwise. The Laplacian matrix is defined as and when .
Assumption 3. The undirected communication graph is connected.
Under Assumption 3, one has the following useful lemma.
Lemma 1. For the connected graph , the Laplacian matrix is semi-positive definite with 0 being a simple eigenvalue.
For the multi-agent system (
1), let the formation error of agent
i be
where
is the formation configuration between agents
i and
j. It is obvious that the formation is achievable if
and there
exists such that
Under condition (
2), the dynamics of the formation error are given as
The objective of this paper is to design an appropriate distributed formation controller based on output information to realize the formation of the N agents. Note that the formation is realized if and only if the formation error reaches zero. To realize this objective, this paper intends to (1) design a reduced-order observer with order less than n to estimate the formation error to further reduce the computational cost; (2) propose an appropriate distributed controller based on the formation error estimation.
3. Main Results
In this section, the reduced-order appointed-time observer is firstly designed to estimate the formation error , and the distributed neural-network-based formation controller is then proposed for each agent.
3.1. Reduced-Order Appointed-Time Observer Design
Since the relative input information and the nonlinearity are unknown, a transformation is needed on the formation error to eliminate the second term in the right hand of (
3).
Choose matrices
and
such that both
and
are of full rank. Let
where
and
. By the definition of
T, one has
,
and
. Then, it is not difficult to derive that
Let
. Then, one can obtain that
where
is the information that can be used in the observer design. Then, the appointed-time estimation of the formation error
is achievable if the appointed-time observer for
can be designed.
The dynamics of
can be described as
Let
. Then, one has
That is,
can be used in observer design.
It is known from [
16] that under Assumption 2,
is observable. Then, by borrowing the time-varying transformation structure [
19,
20], one can design the distributed appointed-time observer as follows:
where
,
F is the gain matrix such that
is stable, and
is the time-varying transformation, which is calculated by
with
.
Note that
is the observability Gramian of the pair
, and the derivative of
can be described as
Since is observable, one has that is invertible. Therefore, the observer designed in the previous subsection exists under Assumption 2.
The following result shows the efficiency of the designed observer.
Theorem 1. Under Assumption 2, the distributed observer in (8) estimates the formation error at any appointed time in the sense that , with being any preset time instant. Proof. Let
. Then, the dynamics of
can be written as
Let
. Then, one has
Note that
, which implies
. Therefore, one can conclude that
. □
Remark 2. The key point of realizing observer reduction is the introduction of the transformation T. Specifically, by introducing the variable , one only has to estimate the variable since can be reformulated by and the output ; see (5). Then, the observer is designed to estimate the variable , and thus can estimate the variable , which leads to the convergence of . Remark 3. The observer presented in (8) relies on the relative output information only, which overcomes the limitation of input transmission via communication topologies. Such a design structure decouples the observer design and the formation controller design, which facilitates the formation controller design. Compared with distributed n-order appointed-time observer based on the time-varying transformation structure designed in [20], the proposed appointed-time observer is of order , which has the advantage of reducing the calculation cost. 3.2. Distributed NN-Based Formation Controller Design
Based on the appointed-time formation error estimation, the following distributed formation controller is designed:
where
is the estimation of the unknown neural network weight matrix, and
P is a positive definite matrix with
satisfying the following LMI:
K is the feedback gain matrix designed as
, and
is the damping signal satisfying
with
and
.
We have the following result to design the parameter c.
Theorem 2. Suppose that Assumptions 1–3 hold. The formation of the N agents is achieved by the distributed NN-based formation controller (11) if the parameters satisfieswhere denotes the smallest nonzero eigenvalue of Laplacian matrix . Proof. Choose
such that
. Then, one has
. Let
, and one has
. By Theorem 1,
for
with arbitrarily small
. Then, the dynamics of
can be written as
with
. And the compact form of
is given by
where
,
,
,
.
Consider the Lyapunov function candidate
The time derivative of
is given by
Note that
Then, we have
By Assumption 1, one has
Thus,
By noting
and
, one can derive
where the last inequality is obtained from the LMI (
12).
Therefore, one can know from (
20) that
is bounded, and so are
and
. Following the well-known Barbalat’s Lemma [
21], it is not difficult to derive that the formation error
converges to zero, i.e., the formation is achieved under the controller (
11). □
Remark 4. To realize the asymptotic convergence of the formation error for networked systems in the presence of unknown nonlinearities, the neural network approach is introduced, with the adaptive gain designed to estimate the unknown neural network constant weight matrix. Moreover, an extra term is introduced in the controller to tackle the residual error.
Remark 5. Compared with existing formation results [4,5,6,7,8,10,11], the proposed output-feedback formation controller depends on only relative output information, where no observer information transmission is needed during the whole process. Such a design structure has the advantages of reducing communication cost and being free from network attack. Remark 6. Note that the Lyapunov function involves the Laplacian matrix of the graph, indicating that the proposed distributed formation controller is applicable to only undirected graphs. For the case of the directed graph, it is much more difficult to present the distributed formation controller for the networked systems with unknown nonlinearities, due to the asymmetric property of the Laplacian matrix associated with the directed graph.
Remark 7. Note that the proposed distributed formation controller requires the accurate relative output measurement. For the case in which measure errors exist, the estimation error of the formation error cannot accurately converge to zero at appointed time. However, it is not difficult to derive that the estimation error of the formation error is bounded if the measure error for each agent is bounded. Then, the proposed distributed formation controller can ensure the boundedness of the formation error for networked systems in the presence of measurement errors.
4. Simulation
In this section, a numerical simulation is presented to demonstrate the effectiveness of the proposed controller. Consider the networked system consisting of five agents, the Laplacian topology among which is depicted in
Figure 1. System matrices are given by (
1) with
which satisfy Assumption 2. The unknown nonlinearities are presented as
with
, where the basic functions
; the unknown constant matrix
; and the residual error
with upper bound
.
Choose
Then, one can obtain
and
Further, choose
, which gives
Solving the LMI (
12) gives
and
which yields
The formation configuration is set as
which satisfies condition (
2). Choose
as
Furthermore, choose
and
. To facilitate the simulation illustration, set the predefined time as
, and let
before the predefined time
. Moreover, to avoid the singularity caused by
, let
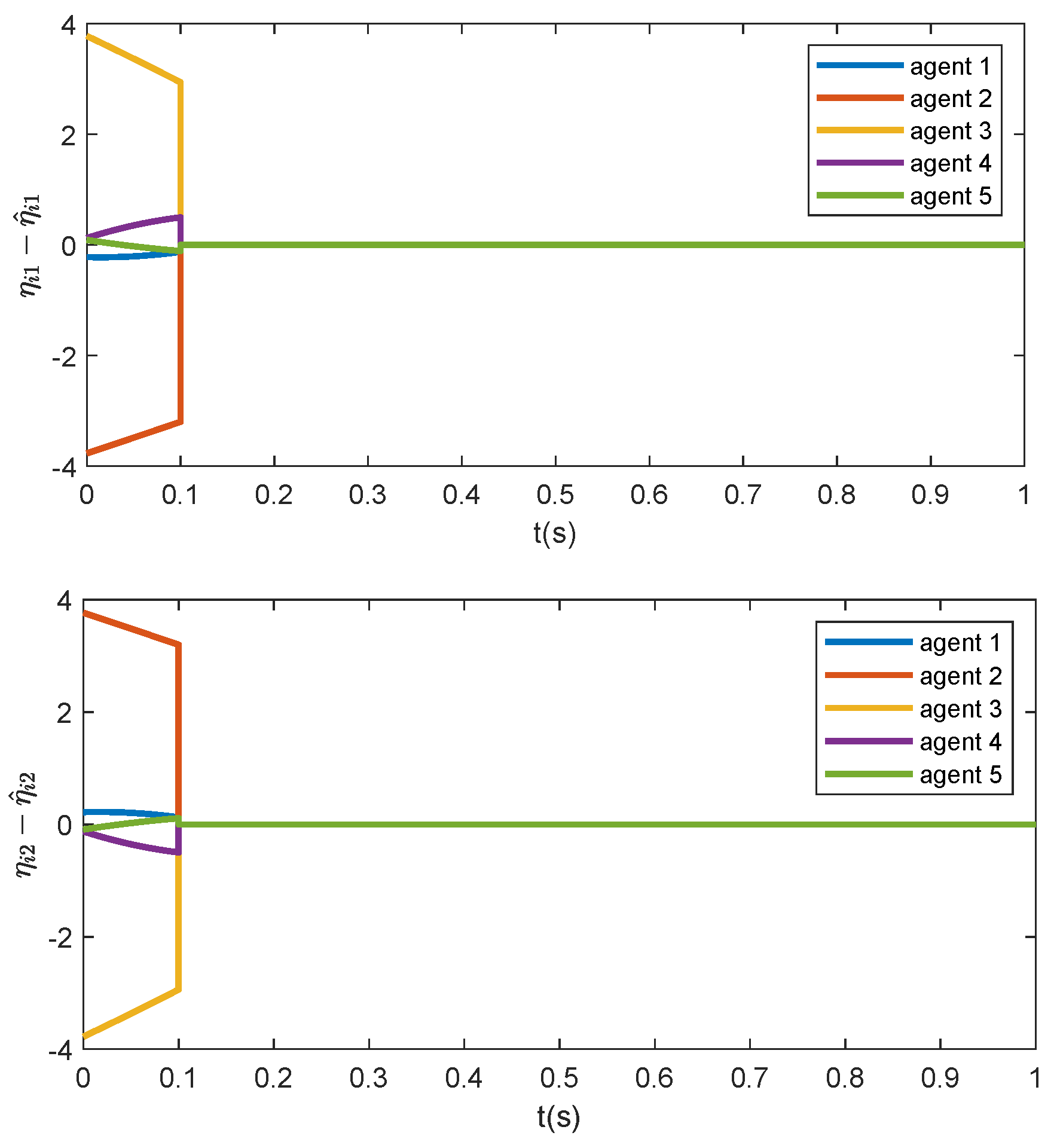
. The initial states are set as
randomly. The trajectories of the estimation error
are presented in
Figure 2. To show the effectiveness of the proposed appointed-time observer, only the trajectories of the estimation errors within time range
are drawn. Clearly, the proposed observer can estimate the formation error at predefined time
. Note that
indicating that
. This is consistent with the simulation result as shown in
Figure 2. The trajectories of the formation error are illustrated in
Figure 3, which asymptotically converge to zero, meaning that the formation of the five agents can be achieved under the proposed distributed formation controller.
5. Conclusions
In this paper, the NN-based distributed formation controller was proposed based on the reduced-order observer. The designed reduced-order observer can estimate the formation error of networked systems based on only relative output information at any predefined time, and the order reduction in the observer is mainly realized by the transformation T. In the future, the following directions can be further investigated.
- -
The distributed formation controller presented in this paper is applicable to undirected connected graphs. In practice, the graphs may be general directed, and thus, it is preferable to design distributed formation controllers of networked systems under directed graphs based on the reduced-order appointed-time observer.
- -
The distributed formation controller presented in this paper continuously changes. In the real world, it is more desirable to design discrete-time controllers, which leads to the investigation of the event-triggered formation controller for networked systems based on the reduced-order appointed observer.
- -
The distributed formation controller presented in this paper depends on the agents’ dynamic model. In practice, the nominal model is difficult to obtain, and it is welcome to design data-driven appointed-time observers and formation controllers without using the agents’ dynamic model.
- -
The distributed formation controller presented in this paper can ensure the asymptotical convergence of the formation error for networked systems in the absence of disturbances. It is preferable to analyze the robustness of the appointed-time observer-based formation controller for networked systems in the presence of disturbances by theoretically revealing the upper bound of the formation error.
- -
The parameters of the distributed formation controller depend on the connectivity of the graph, which is not fully distributed. It is desirable to design a fully distributed formation controller based on appointed-time observers by introducing adaptive gain to estimate the global information of the graphs.
- -
The formation shape in this paper is fixed. One can further study the distributed appointed-time observer-based formation controller for time-varying formation tasks.
Author Contributions
Conceptualization, Y.F. and Y.L.; methodology, Y.F.; software, S.S.; validation, Y.F. and Y.L.; formal analysis, C.S.; investigation, Y.F.; writing—original draft preparation, Y.F.; writing—review and editing, S.S. and Y.L.; supervision, Y.F.; project administration, Y.F.; and funding acquisition, Y.F. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Natural Science Foundation of China under grants 62003345 and 62173330. The APC was funded by National Natural Science Foundation of China under grants 62003345 and 62173330.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviation
The following abbreviation is used in this manuscript:
References
- Oh, K.; Park, M.; Ahn, H. A survey of multi-agent formation control. Automatica 2015, 53, 424–440. [Google Scholar] [CrossRef]
- Briinón-Arranz, L.; Seuret, A.; Canudas-de-Wit, C. Cooperative control design for time-varying formations of multi-agent systems. IEEE Trans. Autom. Control 2014, 59, 2283–2288. [Google Scholar] [CrossRef]
- Dong, X.; Zhou, Y.; Ren, Z.; Zhong, Y. Time-varying formation tracking for second-order multi-agent systems subjected to switching topologies with application to quadrotor formation flying. IEEE Trans. Ind. Electron. 2017, 64, 5014–5024. [Google Scholar] [CrossRef]
- Franchi, A.; Giordano, R.; Michieletto, G. Online leader selection for collective tracking and formation control: The second-order case. IEEE Trans. Control Netw. Syst. 2019, 6, 1415–1425. [Google Scholar] [CrossRef]
- Zhao, Y.; Duan, Q.; Wen, G.; Zhang, D.; Wang, B. Time-varying formation for general linear multiagent systems over directed topologies: A fully distributed adaptive technique. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 532–541. [Google Scholar] [CrossRef]
- Chen, L.; Cao, M.; Li, C. Angle rigidity and its usage to stabilize multiagent formations in 2-D. IEEE Trans. Autom. Control 2021, 66, 3667–3681. [Google Scholar] [CrossRef]
- Zhao, Y.; Hao, Y.; Wang, Q.; Wang, Q. A rigid formation control approach for multi-agent systems with curvature constraints. IEEE Trans. Circuits Syst. Express Briefs 2021, 68, 3431–3435. [Google Scholar] [CrossRef]
- Fu, J.; Lv, Y.; Wen, G.; Yu, X. Local measurement based formation navigation of nonholonomic robots with globally bounded inputs and collision avoidance. IEEE Trans. Netw. Sci. Eng. 2021, 8, 2342–2354. [Google Scholar] [CrossRef]
- Cajo, R.; Guinaldo, M.; Fabregas, E.; Dormido, S.; Plaza, D.; De Keyser, R.; Ionescu, C. Distributed formation control for multiagent systems using a fractional-order proportional-integral structure. IEEE Trans. Control Syst. Technol. 2021, 29, 2738–2745. [Google Scholar] [CrossRef]
- Tang, Y.; Zhang, D.; Shi, P.; Zhang, W.; Qian, F. Event-based formation control for nonlinear multiagent systems under Dos attacks. IEEE Trans. Autom. Control 2021, 66, 452–459. [Google Scholar] [CrossRef]
- Nandanwar, A.; Dhar, N.K.; Malyshev, D.; Rybak, L.; Behera, L. Stochastic event-based super-twisting formation control for multiagent system under network uncertainties. IEEE Trans. Control Netw. Syst. 2022, 9, 966–978. [Google Scholar] [CrossRef]
- Song, C.; Liu, L.; Xu, S. Circle formation control of mobile agents with limited interaction range. IEEE Trans. Autom. Control 2019, 64, 2115–2121. [Google Scholar] [CrossRef]
- Fang, X.; Zhou, J.; Wen, G. Location game of multiple unmanned surface vessels with quantized communications. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 1322–1326. [Google Scholar] [CrossRef]
- Yang, F.; Wilde, R. Observers for linear systems with unknown inputs. IEEE Trans. Autom. Control 1988, 33, 677–681. [Google Scholar] [CrossRef]
- Lv, Y.; Wen, G.; Huang, T.; Duan, Z. Adaptive attack-free protocol for consensus tracking with pure relative output information. Automatica 2020, 117, 108998. [Google Scholar] [CrossRef]
- Lv, Y.; Wen, G.; Huang, T. Adaptive protocol design for distributed tracking with relative output inforamtion: A distrinbuted fixed-time observer approach. IEEE Trans. Control Netw. Syst. 2020, 7, 118–128. [Google Scholar] [CrossRef]
- Engel, R.; Kreisselmeier, G. A continuous-time observer which converges in finite time. IEEE Trans. Autom. Control 2002, 47, 1202–1204. [Google Scholar] [CrossRef]
- Raff, T.; Lachner, F.; Allgöwer, F. A finite time unknown input observer for linear systems. In Proceedings of the 14th Mediteranean Conference on Control and Automation, Ancona, Italy, 28–30 June 2006; pp. 1–5. [Google Scholar]
- Pin, G.; Yang, G.; Serrani, A.; Parisini, T. Fixed-time observer design for LTI systems by time-varying coordinate transformation. In Proceedings of the 59th IEEE Conference on Decision and Control (CDC), Jeju Island, Republic of Korea, 14–18 December 2020; pp. 6040–6045. [Google Scholar]
- Lv, Y.; Gao, Z.; Fu, Y.; Wen, G.; Ogorzałek, M. Complex network dynamics of multiscroll chaotic attractors and their output-feedback pinning synchronization. Int. J. Bifurc. Chaos 2022, 32, 2250070. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems; Prentice Hall: Englewood Cliffs, NJ, USA, 2002. [Google Scholar]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




