
Offshore Oil Spill Detection Based on CNN, DBSCAN, and Hyperspectral Imaging
Abstract
:1. Introduction
2. Data Acquisition and Preprocessing
3. Theoretical Framework and Method Design
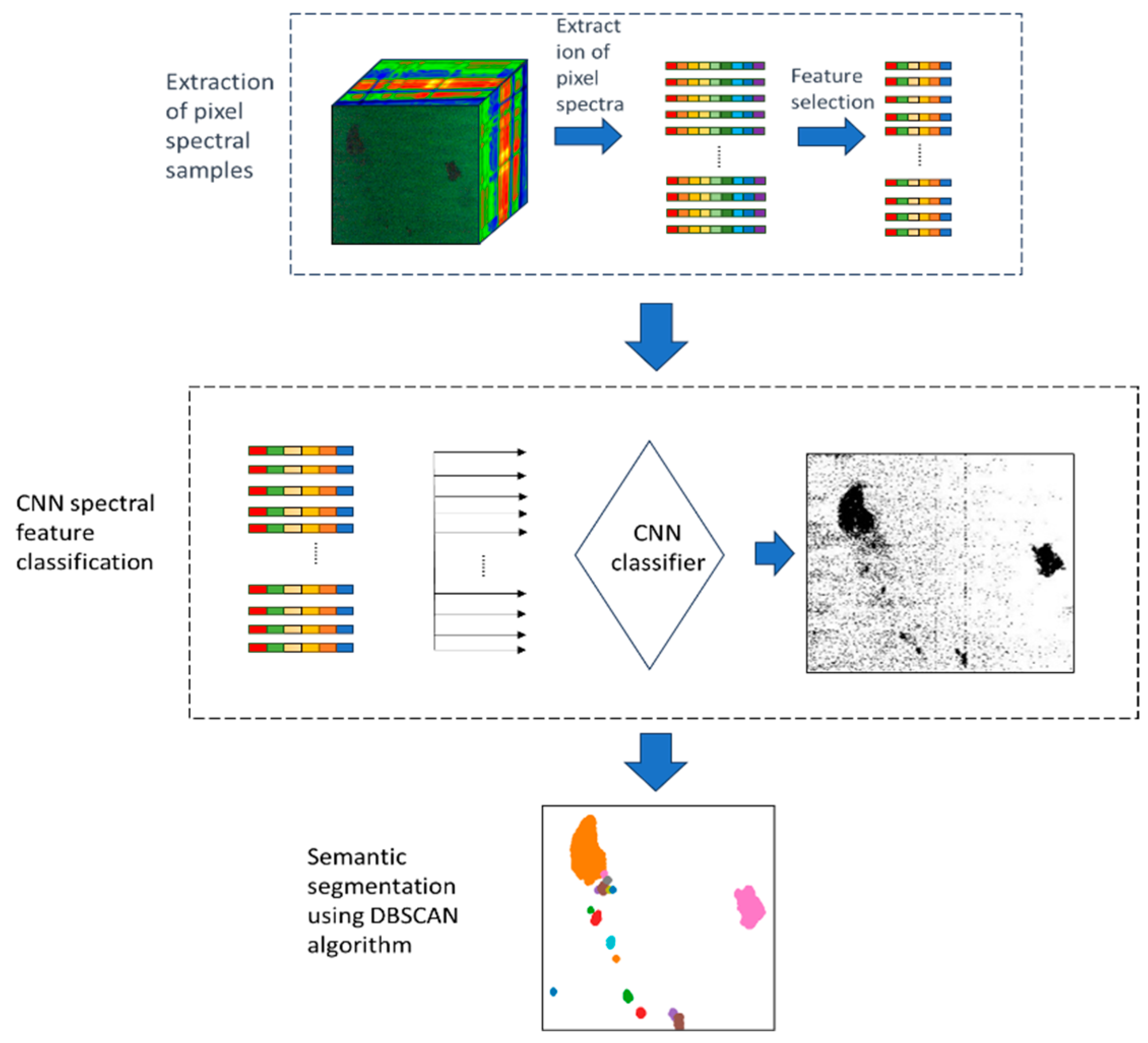
3.1. Method Design
- (1)
- The extraction of pixel spectra from hyperspectral images and feature selection to construct pixel spectral samples.
- (2)
- The classification of pixel spectral samples using a convolutional neural network (CNN)-based model.
- (3)
- The segmentation of oil spill area from the classification results using the DBSCAN algorithm.
3.2. Spectral Feature Selection
- (1)
- A large number of features can increase the model’s training time, affecting its efficiency.
- (2)
- A large number of features can lead to the “curse of dimensionality”, increasing the model’s complexity and weakening its generalization capability.
- (1)
- Calculate the baseline accuracy: Before constructing the Random Forest, start by calculating the baseline accuracy, which is the accuracy of the model when no features are considered.
- (2)
- Rank a specific feature: For each feature, randomly shuffle its order, disrupting its relationship with the target variable.
- (3)
- Recalculate accuracy: Train the model using the shuffled feature and calculate the new accuracy.
- (4)
- Compute the decrease in accuracy: The decrease in accuracy is equal to the baseline accuracy minus the new accuracy obtained using the shuffled feature.
- (5)
- Repeat steps 3 and 4: Repeat the process multiple times, permuting the same feature multiple times, and calculate the Mean Decrease Accuracy, which is the average decrease in accuracy.
3.3. CNN Classification Module
- (1)
- Data normalization: First, normalize the input data to accelerate model training and reduce the impact of noisy data on the model.
- (2)
- Feature extraction through convolution: The convolutional layers employ convolutional kernels to extract relevant features from the input data.
- (3)
- Pooling down-sampling: The pooling layer reduces the dimensions of the output data from the convolutional layers, preserving essential features while compressing the data.
- (4)
- Classification through the fully connected layer: The primary role of the fully connected layer is classification. It aggregates, classifies, and adjusts network weights based on neuron feedback, ultimately generating the classification results.
3.4. Image Segmentation Based on the DBSCAN Algorithm
- (1)
- Cluster analysis can be performed without the need to specify the number of clusters in advance.
- (2)
- Cluster analysis can be applied to dense datasets of arbitrary shapes.
- (3)
- Anomalous data points are unlikely to exert a substantial impact on the clustering results and can be discerned during the clustering process.
4. Experimental Results and Evaluation
4.1. Evaluation Methods
- (1)
- TP: Pixels classified as oil spill areas and are indeed oil spill area pixels are referred to as True Positives.
- (2)
- FP: Pixels classified as oil spill areas but, in reality, are non-oil spill area pixels are referred to as False Positives.
- (3)
- TN: Pixels classified as non-oil spill areas and are indeed non-oil spill area pixels are referred to as True Negatives.
- (4)
- FN: Pixels predicted as non-oil spill area pixels but are actually oil spill area pixels are referred to as False Negatives.
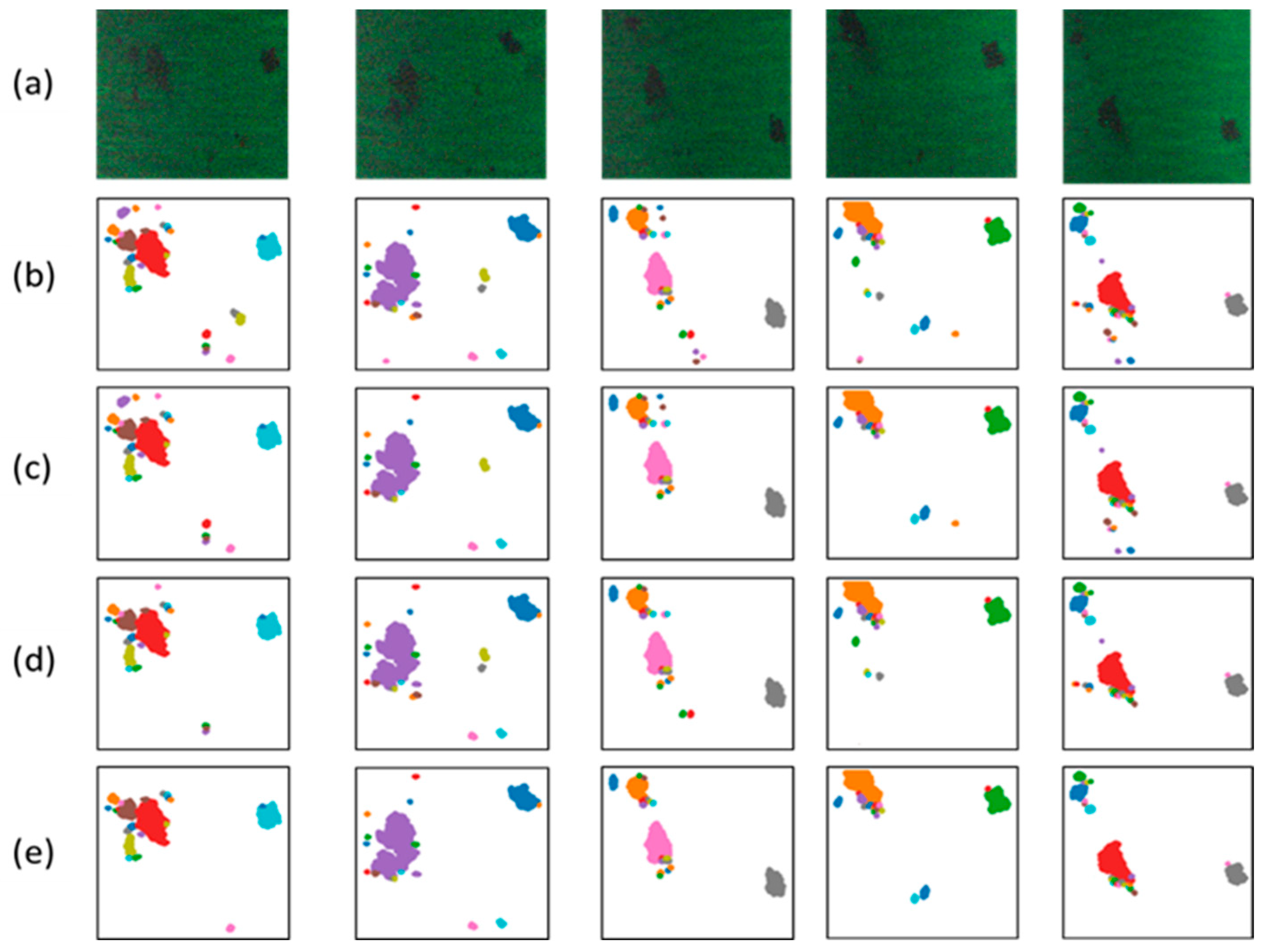
4.2. Results and Comparative Analysis
5. Discussion
6. Conclusions
- (1)
- Compared to DRSNet, CNN-Visual Transformer, and GCN, the model proposed in this study shows a similar level of accuracy in oil spill detection. However, it has a clear advantage in terms of detection speed when compared to the other three methods.
- (2)
- The proposed model demonstrates high detection accuracy, even with a small number of training samples, which highlights its robustness.
- (3)
- It outperforms the other three models in the detection of smaller oil spill areas.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, K.; Yu, H.; Yan, J.; Liao, J. Analysis of offshore oil spill pollution treatment technology. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2020; Volume 510, p. 042011. [Google Scholar]
- Bhatti, U.A.; Marjan, S.; Wahid, A.; Syam, M.S.; Huang, M.; Tang, H.; Hasnain, A. The effects of socioeconomic factors on particulate matter concentration in China’s: New evidence from spatial econometric model. J. Clean. Prod. 2023, 417, 137969. [Google Scholar] [CrossRef]
- Han, H.; Huang, S.; Liu, S.; Sha, J.; Lv, X. An Assessment of Marine Ecosystem Damage from the Penglai 19-3 Oil Spill Accident. J. Mar. Sci. Eng. 2021, 9, 732. [Google Scholar] [CrossRef]
- Al-Ruzouq, R.; Gibril, M.B.; Shanableh, A.; Kais, A.; Hamed, O.; Al-Mansoori, S.; Khalil, M.A. Sensors, features, and machine learning for oil spill detection and monitoring: A review. Remote Sens. 2020, 12, 3338. [Google Scholar] [CrossRef]
- Jafarzadeh, H.; Mahdianpari, M.; Homayouni, S.; Mohammadimanesh, F.; Dabboor, M. Oil spill detection from Synthetic Aperture Radar Earth observations: A meta-analysis and comprehensive review. GIScience Remote Sens. 2021, 58, 1022–1051. [Google Scholar] [CrossRef]
- Shamsudeen, T.Y. Advances in remote sensing technology, machine learning and deep learning for marine oil spill detection, prediction and vulnerability assessment. Remote Sens. 2020, 12, 3416. [Google Scholar]
- Yekeen, S.T.; Balogun, A.L.; Yusof, K.B.W. A novel deep learning instance segmentation model for automated marine oil spill detection. ISPRS J. Photogramm. Remote Sens. 2020, 167, 190–200. [Google Scholar] [CrossRef]
- Yang, J.; Hu, Y.; Ma, Y.; Li, Z.; Zhang, J. Research on oil spill pollution type identification using rpnet deep learning model and airborne hyperspectral image. In Proceedings of the IGARSS 2022–2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 807–810. [Google Scholar]
- Vasconcelos, R.N.; Lima, A.T.; Lentini, C.A.; Miranda, J.G.; de Mendonça, L.F.; Lopes, J.M.; Santana, M.M.; Cambuí, E.C.; Souza, D.T.; Costa, D.P.; et al. Deep Learning-Based Approaches for Oil Spill Detection: A Bibliometric Review of Research Trends and Challenges. J. Mar. Sci. Eng. 2023, 11, 1406. [Google Scholar] [CrossRef]
- Haut, J.M.; Moreno-Alvarez, S.; Pastor-Vargas, R.; Perez-Garcia, A.; Paoletti, M.E. Cloud-Based Analysis of Large-Scale Hyperspectral Imagery for Oil Spill Detection. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023. [Google Scholar] [CrossRef]
- Jiang, Z.; Zhang, J.; Ma, Y.; Mao, X. Hyperspectral remote sensing detection of marine oil spills using an adaptive long-term moment estimation optimizer. Remote Sens. 2021, 14, 157. [Google Scholar] [CrossRef]
- Bhatti, U.A.; Huang, M.; Neira-Molina, H.; Marjan, S.; Baryalai, M.; Tang, H.; Wu, G.; Bazai, S.U. MFFCG–Multi feature fusion for hyperspectral image classification using graph attention network. Expert Syst. Appl. 2023, 229, 120496. [Google Scholar] [CrossRef]
- Wang, D.; Wan, J.; Liu, S.; Chen, Y.; Yasir, M.; Xu, M.; Ren, P. BO-DRNet: An improved deep learning model for oil spill detection by polarimetric features from SAR images. Remote Sens. 2022, 14, 264. [Google Scholar] [CrossRef]
- Wang, D.; Liu, S.; Zhang, C.; Xu, M.; Yang, J.; Yasir, M.; Wan, J. An improved semantic segmentation model based on SVM for marine oil spill detection using SAR image. Mar. Pollut. Bull. 2023, 192, 114981. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Wang, J.; Hu, Y.; Ma, Y.; Li, Z.; Zhang, J. Hyperspectral Marine Oil Spill Monitoring Using a Dual-Branch Spatial–Spectral Fusion Model. Remote Sens. 2023, 15, 4170. [Google Scholar] [CrossRef]
- Seydi, S.T.; Hasanlou, M.; Amani, M.; Huang, W. Oil spill detection based on multiscale multidimensional residual CNN for optical remote sensing imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 10941–10952. [Google Scholar] [CrossRef]
- Dehghani-Dehcheshmeh, S.; Akhoondzadeh, M.; Homayouni, S. Oil spills detection from SAR Earth observations based on a hybrid CNN transformer networks. Mar. Pollut. Bull. 2023, 190, 114834. [Google Scholar] [CrossRef] [PubMed]
- Hongyan, Y.; Jianmin, D.U. Research Progress Review of Hyperspectral Remote Sensing Image Band Selection. J. Comput. Eng. Appl. 2022, 58, 1–12. [Google Scholar]
- Akhiat, Y.; Manzali, Y.; Chahhou, M.; Zinedine, A. A new noisy random forest based method for feature selection. Cybern. Inf. Technol. 2021, 21, 10–28. [Google Scholar] [CrossRef]
- Huo, W.; Li, W.; Zhang, Z.; Sun, C.; Zhou, F.; Gong, G. Performance prediction of proton-exchange membrane fuel cell based on convolutional neural network and random forest feature selection. Energy Convers. Manag. 2021, 243, 114367. [Google Scholar] [CrossRef]
- Li, Z.; Liu, F.; Yang, W.; Peng, S.; Zhou, J. A survey of convolutional neural networks: Analysis, applications, and prospects. IEEE Trans. Neural Netw. Learn. Syst. 2021, 33, 6999–7019. [Google Scholar] [CrossRef] [PubMed]
- Saha, P.K.; Logofatu, D. Efficient approaches for density-based spatial clustering of applications with noise. In Proceedings of the Artificial Intelligence Applications and Innovations: 17th IFIP WG 12.5 International Conference, AIAI 2021, Hersonissos, Crete, Greece, 25–27 June 2021; Springer International Publishing: Berlin/Heidelberg, Germany, 2021; pp. 184–195. [Google Scholar]
- Niu, B.; Feng, Q.; Chen, B.; Ou, C.; Liu, Y.; Yang, J. HSI-TransUNet: A transformer based semantic segmentation model for crop map** from UAV hyperspectral imagery. Comput. Electron. Agric. 2022, 201, 107297. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experimental Conditions of the Simulation | Number of Hyperspectral Images | |||
|---|---|---|---|---|
| Training Set | Validation Set | Test Set | Total | |
| No oil spill and no wave | 20 | 15 | 15 | 50 |
| No oil spill and waves | 20 | 15 | 15 | 50 |
| oil spill and no wave | 142 | 40 | 20 | 202 |
| oil spill and waves | 142 | 40 | 20 | 202 |
| Total | 324 | 110 | 70 | 504 |
| Layer | Convolution Kernel | Step | Size | Activation Function |
|---|---|---|---|---|
| Conv1D | 1 × 4 | 1 | 1 × 88 | Relu |
| Conv1D | 1 × 4 | 1 | 1 × 87 | Relu |
| MaxPooling | 2 | 1 × 44 | ||
| Conv1D | 1 × 4 | 1 | 1 × 43 | Relu |
| Conv1D | 1 × 4 | 1 | 1 × 42 | Relu |
| MaxPooling | 2 | 1 × 22 | ||
| Flatten | ||||
| Dense | Relu | |||
| Dense | Relu | |||
| Dense | Relu | |||
| Dense | Softmax |
| Predict | |||
| Oil Spill | Non-Oil Spill | ||
| Actual | Oil Spill | TP | FN |
| Non-Oil Spill | FP | TN | |
| Method | PA (%) | OSCPA (%) | NOSCPA (%) | MPA (%) | MT (ms) |
|---|---|---|---|---|---|
| CNN-DBSCAN | 90.69 | 89.21 | 96.31 | 92.12 | 696 |
| DRSNet | 91.31 | 95.11 | 89.97 | 92.84 | 2386 |
| CNN-ViT | 91.93 | 93.09 | 90.81 | 91.57 | 1893 |
| GCN | 90.74 | 90.96 | 92.59 | 91.54 | 1509 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhan, C.; Bai, K.; Tu, B.; Zhang, W. Offshore Oil Spill Detection Based on CNN, DBSCAN, and Hyperspectral Imaging. Sensors 2024, 24, 411. https://doi.org/10.3390/s24020411
Zhan C, Bai K, Tu B, Zhang W. Offshore Oil Spill Detection Based on CNN, DBSCAN, and Hyperspectral Imaging. Sensors. 2024; 24(2):411. https://doi.org/10.3390/s24020411
Chicago/Turabian StyleZhan, Ce, Kai Bai, Binrui Tu, and Wanxing Zhang. 2024. "Offshore Oil Spill Detection Based on CNN, DBSCAN, and Hyperspectral Imaging" Sensors 24, no. 2: 411. https://doi.org/10.3390/s24020411