1. Introduction
This paper deals with the problem of minimizing fuel consumption for fixed-wing propeller UAVs. This is important in a surveillance mission as reducing the fuel consumption of the UAV increases its autonomy and its range, allowing for longer distances to be patrolled and longer times to be spent on targets. However, minimizing fuel consumption for aircraft is difficult due to the complexity of estimating the fuel consumption. In fact, most of the methods previously used to estimate the fuel consumption of aircraft have relied on precomputed or experimentally recorded tables [
1]. This may be sufficient for commercial aircraft, which typically fly predetermined trajectories, but cannot be used efficiently for UAVs, which fly ever-changing paths based on the progressing circumstances of the mission. For the case of UAVs, it would be advantageous to have an accurate mathematical model to compute the fuel burn. Having such a model could also mean that it would be possible to develop optimization algorithms for minimizing fuel consumption along the trajectory.
Previous works that have focused on the estimation of fuel consumption for aircraft include [
1], which used a machine learning method, namely the support vector method, to train a model from fuel consumption tables in order to estimate the consumption for an unseen trajectory. In [
2], Xi and Jingjie used a similar support vector-based approach but improved it with concepts from the just-in-time learning algorithm to focus the selection of the relevant sampling set and concepts from the differential evolution and tune the parameters of the support vector machine algorithm. Using their enhanced approach, they achieved superior estimation results. Another example based on pre-calculated tables was proposed in [
3] where Zhang et al. used linear regression to estimate the fuel consumption of a flight path. One other example using pre-calculated or experimental data was from [
4], where the fuel consumption was estimated using the RELAX algorithm. This algorithm relies on a dataset and uses a very large number of repetitive iterations of signal components to approximate signal parameters for the estimation of fuel consumption.
Other methods have relied on developing analytical models to directly calculate the fuel consumption instead of relying on experimental datasets. This is the case of [
5], in which L’Afflitto and Sultan modeled the aircraft as a six degrees-of-freedom rigid body. However, their method made several assumptions and did not consider the altitude of the aircraft or the propeller efficiency. Another work relying on an analytical model was proposed by Wang et al. in [
6] for propulsion aircraft and can, therefore, not be used for propeller aircraft, which is often the case for UAVs. One of the most complete works using an analytical model to compute the fuel consumption of propeller aircraft was published by us in 2012 [
7]. The approach used Newton’s second law of motion to derive the equations involved. These were Riccati equations or were reduced to such equations after neglecting a small term. The equations were then transformed into second order linear differential equations that were solved exactly. Despite the rigor of this work, there were still approximations and the equations were valid for flight at constant speeds only. To minimize fuel consumption along a trajectory by varying the power setting and velocity of the UAV, it would be important to have equations for fuel consumption that are based on the power settings of the UAV and not its speed.
Due to the lack of accurate methods for computing fuel consumption, very few methods exist to minimize fuel consumption along a trajectory. In [
8], Frazzoli et al. used a simulated annealing metaheuristic algorithm supplemented with a Monte Carlo simulation to minimize the aircraft fuel consumption. Their model for the fuel burn was not based on analytical formulas, but on a point mass model with the aircraft performance parameters derived from an online database. One last example of fuel minimization was provided in [
9], where Brown and Anderson used PSO to compute a trajectory for a maritime radar surveillance UAV that minimized fuel consumption. The fitness function relies on a simplified analytical model to compute the fuel consumption associated with a trajectory. In most cases, these simplified models compute the fuel consumption based on a given aircraft velocity. In fact, we show in this work that this cannot be done accurately, and that one can only compute the velocity and fuel consumption of a UAV based on a given power setting.
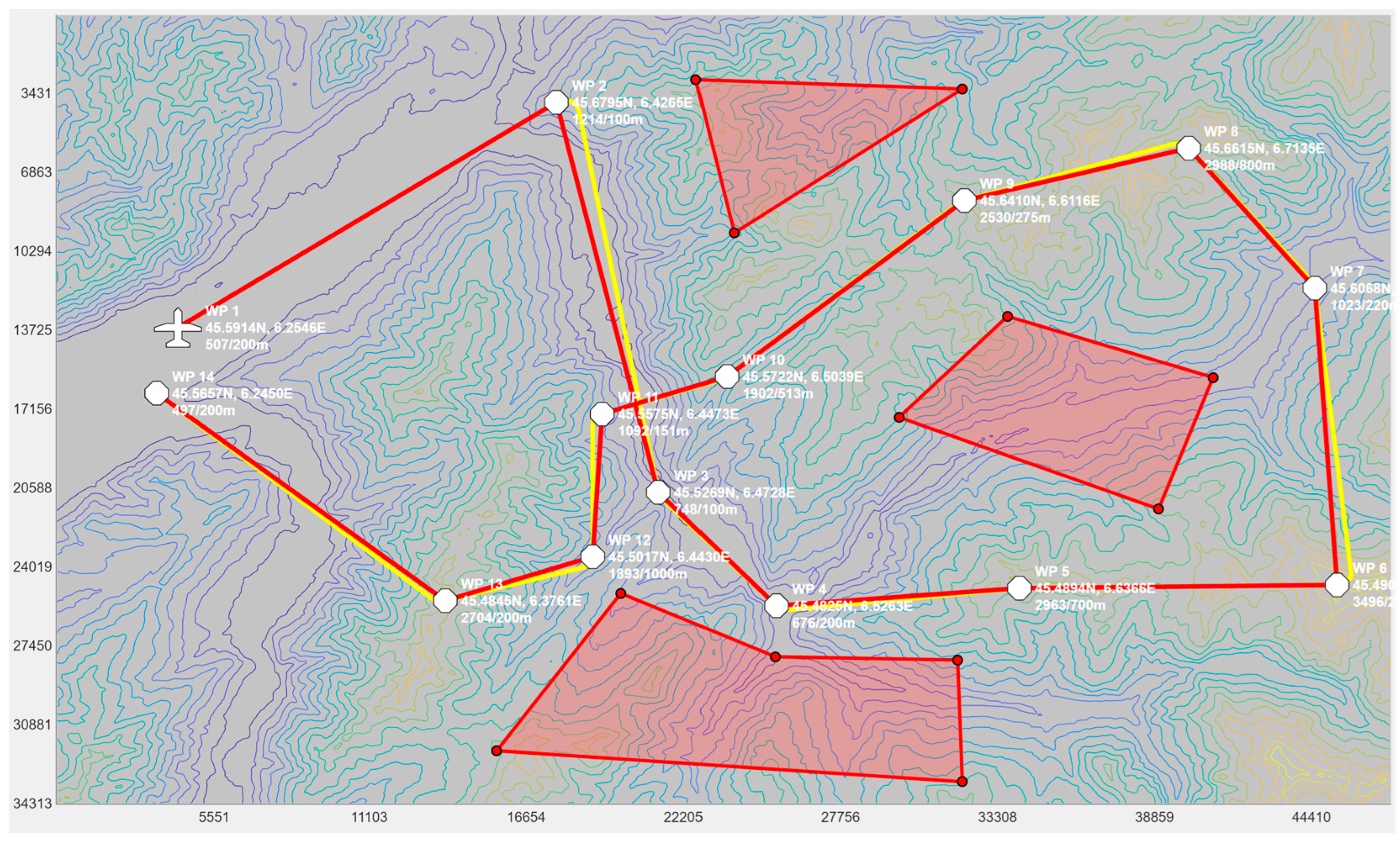
This paper presents a method based on PSO for optimizing the power settings of a UAV along a given trajectory in order to minimize fuel consumption and maximize autonomy. Given a trajectory represented by a series of waypoints, such as the one shown in
Figure 1, our proposed approach first used a method inspired from [
10] to smooth the trajectory using circular arcs. However, what is unique to our work is that the geometrical constructions were arranged so that the smoothed trajectory overflew the waypoint, which is desired in a surveillance mission or for UAVs tasked with collecting data from distributed wireless sensors, such those as described in [
11]. Secondly, our method segmented the trajectory into a large number of small segments and computed the power settings for each segment using PSO.
One downside of using PSO or most metaheuristics in general is that their computation time can be long as they work by iteratively improving candidate solutions over several iterations. To address this drawback, we resorted to parallel programming and implemented PSO in parallel on a multicore CPU. This solution has been used in the literature and three main approaches exist for this. The first one is to parallelize the evaluation of the fitness function [
12]. This approach is known as the primary–secondary architecture, where the primary thread delegates the heavy computation to the secondary threads. Another approach is the island model, where each thread runs an independent instance of PSO and they exchange their solutions based on a given policy. This approach is more complicated to implement but has the advantage of limiting communication between the threads and maximizing the fraction of the code that is parallelized. This approach is discussed in detailed in [
13]. The last approach is data-level parallelization [
12], where low-level computations are parallelized based on partitioning the data on multiple cores. This method is mostly used in graphics processing units (GPUs) [
14], but can also be used in CPUs. In this work, we used a mix of the primary–secondary method and data-level parallelization in that the fitness function of PSO was parallelized using multiple threads and the loops of PSO were parallelized using a data-level approach. This provided the greatest acceleration.
The contribution of this paper is fourfold. First, it provides a geometrical model for smoothing a trajectory in 3D while overflying the waypoints, which is essential in surveillance missions. Second, it provides an analytical formulation of the equation of motion for an aircraft to accurately compute the velocity and fuel consumption based on a given power setting. Third, it presents PSO that computes the power settings along the trajectory that minimize fuel consumption and maximize autonomy. Fourth, it parallelizes the proposed method in a multicore CPU, achieving a 21.67× speedup compared to a sequential execution. As demonstrated in the results section, this allowed for a 56.3 km trajectory to be optimized in just 22.36 s.
The analytical model used was the one found in classical textbooks, such as [
15] and [
16]. However, we incorporated a term that corresponds to the change in mass due to fuel consumption. This has been rarely done, but it is important as fuel consumption reduces with the weight of the aircraft. We then decomposed the equations in the Frenet–Serret coordinates and arranged them so that they could be resolved using a Runge–Kutta method for a given power setting.
The relationships between the modules presented in this paper are illustrated in
Figure 2. Given a trajectory as a series of waypoints, the initial step was to smooth the trajectory by connecting the line segments using circular arcs in a 3D space. Once the trajectory was smoothed, the long segments were divided into equal parts. This ensured that a power setting could be computed for each smaller segment. Then, PSO processed the overall trajectory in batches of 20 segments with an overlap of 10 segments between the sections. During the execution of PSO, each candidate solution (i.e., a sequence of 20 power settings) was tested using the Runge–Kutta method and the analytical model for fuel consumption. Once the fuel consumption and speed of the UAV was computed along the trajectory, the fitness function could be evaluated, which included the various physical constraints related to the UAV. Finally, the optimized power settings were returned by the program.
The remainder of this paper is organized as follows.
Section 2 describes the method used to smooth the trajectory using circular arcs so that it is flyable by a fixed-wing UAV while still overflying the waypoints.
Section 3 presents the equations of motion for the UAV with the decomposition of Newton’s equation, the absolute physical constraints related to the UAV and the trajectories flown at a prescribed power.
Section 4 introduces PSO and explains how it was used in this research to compute the optimized power settings for the UAV along the trajectory. Finally,
Section 5 presents the results with a focus on the quality of the solution computed and the acceleration provided by the parallel implementation in a multicore CPU for fast computation.
2. Trajectory Smoothing Using Circular Arcs
A much-used and efficient method for generating paths for fixed-wing UAVs consists of providing points from which a stickman path can be constructed as a continuous chain of rectilinear segments linked one to another. This path is then smoothed out by replacing the sharp corners where the rectilinear segments meet by continuous curves. This should ensure the continuity of the path tangent, as this continuity corresponds to the continuity of the velocity of the airplane. Since the dynamics of airplanes on circular arcs are relatively easy to analyze, this is the type of connection that is preferred in path construction, and the one that we considered here.
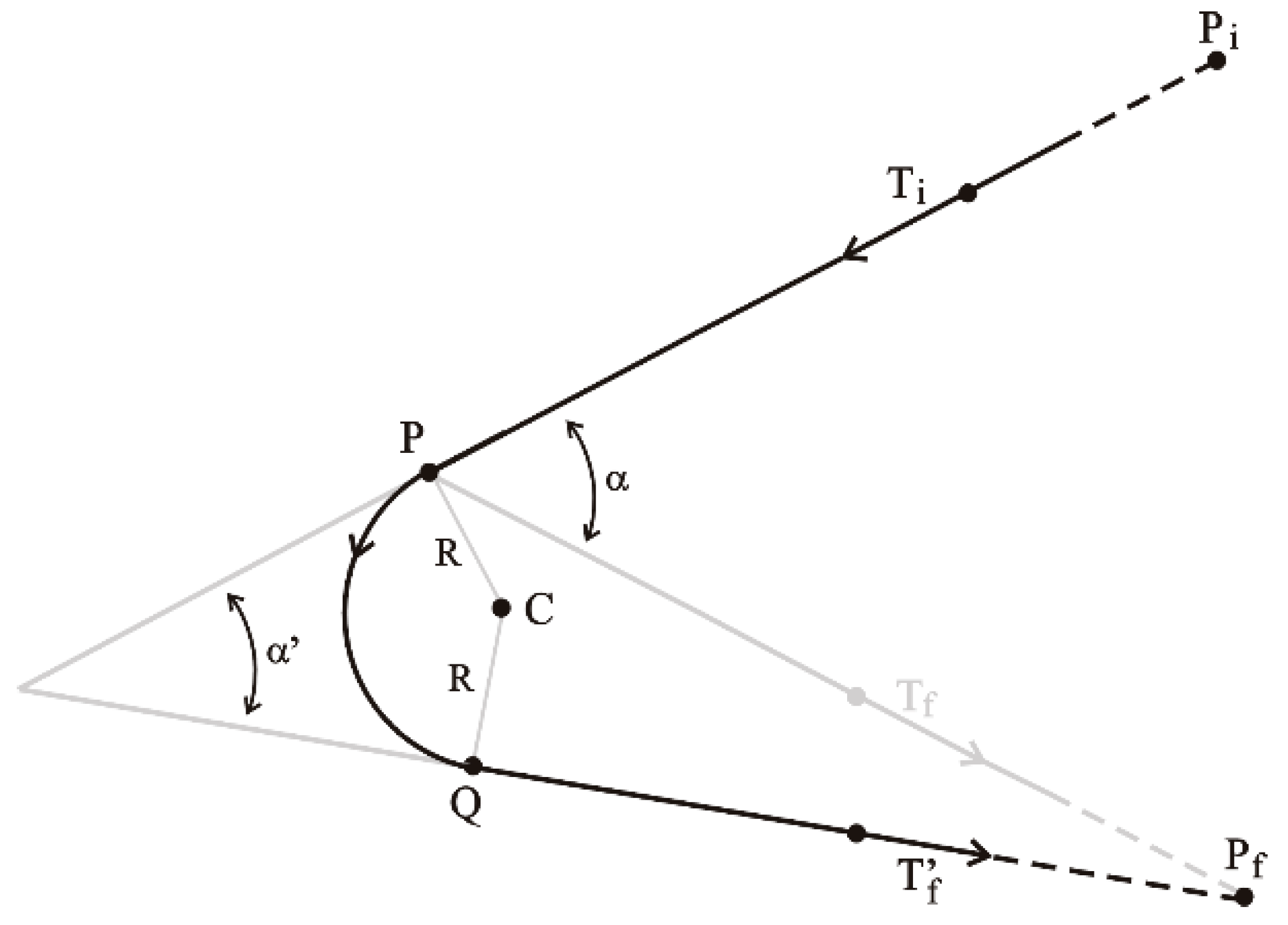
The points provided can play two different roles. In the first one, they end up being outside of the path and a bypass arc of a circle is introduced inside the acute angle made by the rectilinear segments. This arc of a circle is tangent to the two rectilinear segments. Such points can be termed “control points” as their role consists of shaping the global path. Alternatively, the path could go through the provided points, which then become true “waypoints”. In this research, we examined this second approach in which the path went through the waypoint.
We considered a passage from the incoming segment
PiP to the outgoing segment
PPf that went through point
P.
Figure 3 shows such a connection as seen directly from above the plane in which it lies, together with some geometrical constructions that we used to describe it.
Let
Ti and
Tf denote the respective unit tangent vectors for the two rectilinear segments
PiP and
PPf. The angle
α between these segments is as follows.
Let
denote the unit vector that is orthogonal to
Ti and points toward the inside of the angle
Pi P Pf. Then, the center
C of the connecting circular arc is as follows.
Let
denote the unit tangent vector for the rectilinear segment
CPf and
α’. Then, the angle between
Ti and −
is as follows.
An equation describing the circular arc can be obtained by defining the two orthogonal unit vectors
p and
q as follows.
so that the points
x(
ϕ) on the circular arc are as follows.
where the angle
ϕ is null at the midpoint between
P and
Q and increases in the counter-clockwise direction around the center
C of the circle, in the plane of the path, from
P at
ϕ = −(
π −
)/2 to
Q at
ϕ = (
π –
)/2.
3. Equations of Motion for UAVs
The motion of airplanes is regulated by the power generated by its engines. In [
15], it was explained that, because of their internal combustion nature, engines produce power that varies with altitude as the air density changes, according to the following equation.
in which
ρ∞(h) is the density of the undisturbed air in front of the airplane at altitude
h and
ρs and
P(
0) are, respectively, the values of
ρ∞ and
P at sea level. Most of the power produced by the engines is transferred to the propellers that receive the power
PA, as shown in Equation (8).
The parameter
η is the efficiency of the propeller, which varies with the speed of the airplane. The available power
PA must be at least equal to the power required
PR for the airplane motion, which is determined by the equations of motion. The rate of fuel burning is described by the following equation.
in which
W is the total weight of the airplane and
c is the specific fuel consumption. Chapter 5 of [
16] explains how thrust is related to power for propeller driven airplanes. The propeller power
PA moves the air with thrust
TA, as shown in Equation (10).
where
V∞ is the airplane speed and Δ
Vi is the speed increase of the air across the propeller disk. Even when the airplane is not moving, there is power required to turn the propellers. The available thrust
TA is related to the power
PA through a cubic equation, the solution of which is as follows.
where
A = π Rad2 is the area traced by the propeller of radius
Rad when it rotates.
In [
7], it was shown that if Newton’s equation of motion takes into account the change in the mass
M of the airplane as fuel is burned, it takes the form of the following equation.
In this equation,
v is the airplane velocity, (AFR) is the air to fuel ratio in the combustion process, which is about 14.7 for gasoline or diesel [
17], and
F is the total force acting on the center of mass of the airplane.
F has four components: the thrust
TR produced by the engines, the lift produced by the airfoil and the airplane body, the drag due to air resistance and the force of gravity. The unit vector
T is defined as being in the direction of the motion of the center of mass of the airplane. It is, therefore, tangent to the path and we considered that the thrust acts along its direction, as shown in Equation (13).
The lift
L is shown as follows.
where
UL is a unit vector. Assuming that the airplane is bilaterally symmetric, we let
w be the unit vector along the straight line from its left to its right wing tips. Then,
UL =
w × T so that it is always perpendicular to the direction of motion. The drag is shown as follows.
and the force of gravity is shown as follows.
in which
g is the gravitational constant and
k is the unit vector in the positive direction of the Earth
z-axis.
3.1. Decomposition of Newton’s Equation
With the values of the force
F given in Equations (13) to (16), Newton’s Equation (12) becomes the following.
where
T and
N are, respectively, the Frenet–Serret unit tangent and unit normal vectors. The projection of Equation (17) along the vector
T yields the following equation for the longitudinal motion.
There are two components of Equation (17) that are perpendicular to
T: one in the direction of the normal
N and one in the direction of the binormal
B. Its component along
N is shown in Equation (19).
is the centripetal acceleration. Projecting Equation (17) in the direction of
B results in Equation (20).
Given Equations (19) and (20) and the fact that
UL only has components along
N and
B, it can be written as Equation (21).
Thus,
with
3.2. The Absolute Physical Constraints
All airplanes are subject to constraints that are due to their construction and the power of their engines. These are as follows.
The load factor n is bounded below by nmin and above by nmax, with nmax > 1 and nmin ≤ −1.
The lift coefficient is bounded below by CLmin and above by CLmax.
The speed V∞ is bounded below by the stall speed Vstall at which the lift is not sufficient to sustain the airplane motion. It is bounded above by the value VNE (the suffix NE stands for “never exceed”), which is determined by the airplane construction. The power available to move the airplane is bounded above according to the capacity of its engines.
There is also obviously a constraint on the fuel that is available.
For curved paths, the constraint on the load factor and on the lift coefficient impose a lower limit on the turning radius of the path.
3.3. Trajectories with Prescribed Power
We considered the situation in which the power provided by the engine is specified along the path as a continuous function of the distance s travelled along the path, as P(s) for s = 0 to sf = the length of the path.
There were three differential equations to solve. The first one was Equation (2), in which
P = P(
s). The second one was Equation (18), which described the longitudinal component of Newton’s equation of motion. Replacing
L by its value given in Equation (22) resulted the following expression for
CL.
Correspondingly, the drag
D can be written as the following.
Thus, Equation (18) becomes the following differential equation for V
∞.
The value of
s is then obtained by solving the following equation.
4. Power Setting Optimization Using PSO
PSO is a metaheuristic that was proposed by Kennedy and Eberhart in 1995 [
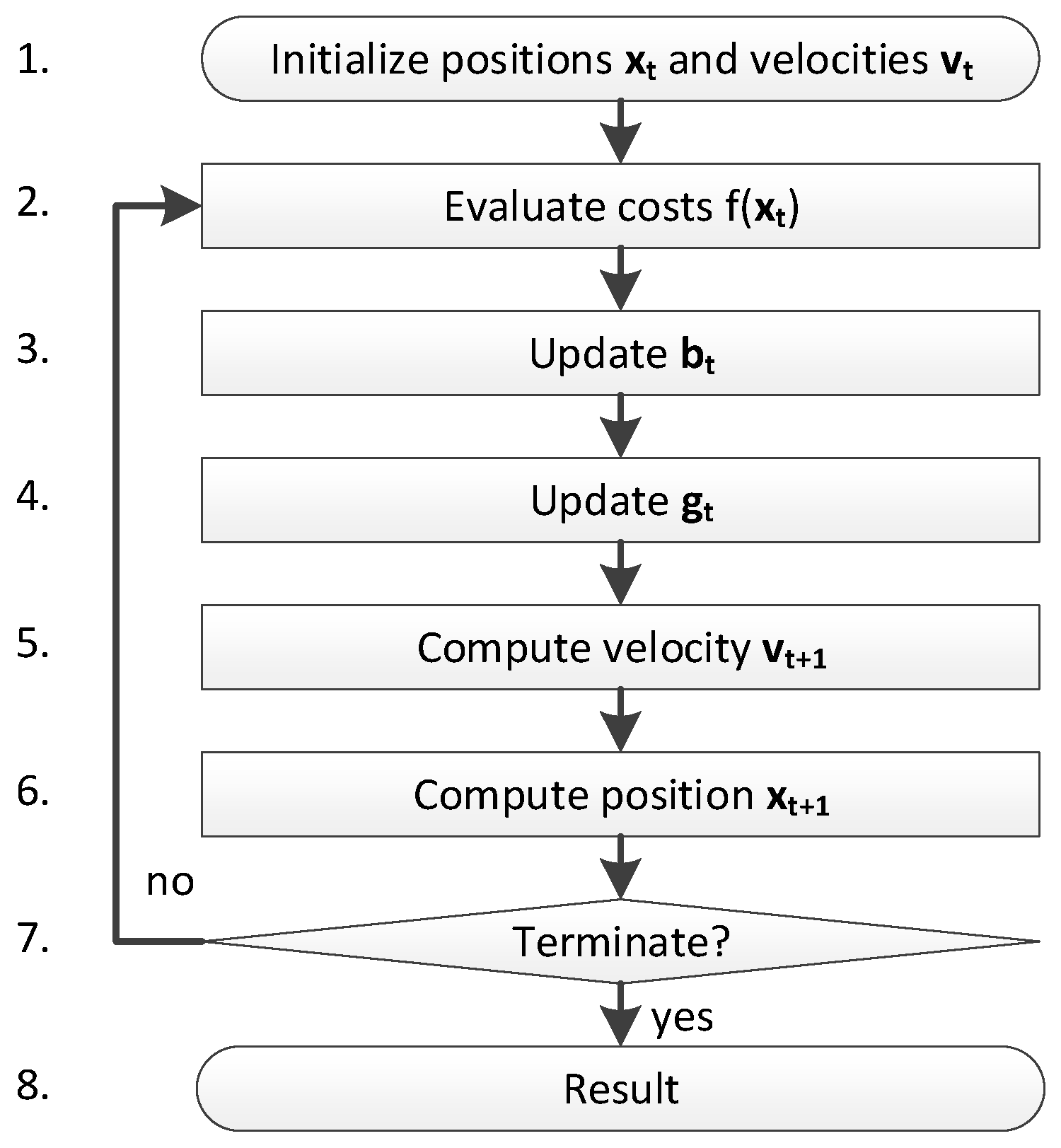
18] and has since been used for finding optimized solutions for a wide range of engineering problems. The algorithm simulates the movements of a swarm of particles in a multidimensional space similar to the movement of a flock of birds or a school of fish. The particles represent the candidate solutions, and their positions evolve throughout the optimization process based on personal and social influences. The flowchart of PSO is illustrated in
Figure 4.
In step 1, the particles (i.e., the candidate solutions) and their velocity are randomly initiated over the search space. In step 2, the fitness of each particle is then evaluated using the fitness or evaluation function. For each particle, the best position
previously occupied by the particle is updated in step 3. This represents the personal influence. Then, in step 4, the best position
ever occupied by any particle of the swarm is updated. This is the social influence. Based on its personal and the social influence, the velocity and position of each particle are updated in steps 5 and 6 using the equations below.
where
and
are the vectors of random values between 0 and 1,
is the inertia weight,
is the personal influence weight and
is the social influence weight. The termination criterion is checked in step 7. In our case, PSO ran for a predetermined number of iterations before terminating. Finally, the results (i.e., the best global solution
) is returned to the caller.
In our proposed PSO-based algorithm, the candidate solutions represented the power settings along the UAV trajectory. The trajectory was composed of linear segments and circular arcs. However, the output of the smoothing function discussed in
Section 2 represented the circular arcs as a sequence of short linear segments. This translated into a trajectory composed only of linear segments in which some were long (segments between the original waypoints) and some were short (segments forming the circular arcs). As a pre-processing step, any segment longer than 500 m was divided into shorter segments. This ensured that the power settings calculated by the proposed algorithm were at a fine resolution. Once the trajectory was divided into a large number of small segments, the segments were processed by PSO in batches of 20. This ensured that the dimension of the problem was not too big and that optimized solutions were found in an acceptable time.
To evaluate the fitness of the candidate solutions, the Runge–Kutta method was used to solve the differential equations presented at the end of
Section 3 and compute the speed and weight (i.e., fuel consumption) at the end of each segment starting from the first to the 20th segment of a batch. The constraints on the load factor, the lift coefficient, the maximum speed and the maximum amount of fuel onboard were checked during the calculation. This ensured that the UAV respected its physical constraints.
Since PSO works by improving a population of candidate solutions over a large number of iterations, it can be time consuming to execute. For this reason, we developed a parallel implementation of the algorithm for a multicore CPU. For this implementation, we used OpenMP and multiple threads that evaluated the fitness of the candidate solutions concurrently. This was possible because there were no dependencies between each of the candidate solutions. When running on a multicore CPU, the threads were executed in parallel, accelerating the computation.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}