
Event-Triggered Distributed Fusion Estimator for Asynchronous Markov Jump Systems with Correlated Noises and Fading Measurements

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (a)
- The model considers the various phenomena a system may encounter during application, including asynchronous uniform sampling, CNs, FMs, and Markov jump parameters, which can better reflect a real situation.
- (b)
- From the LFs to the FC, a variance-based ET mechanism is designed, which can reduce energy consumption.
- (c)
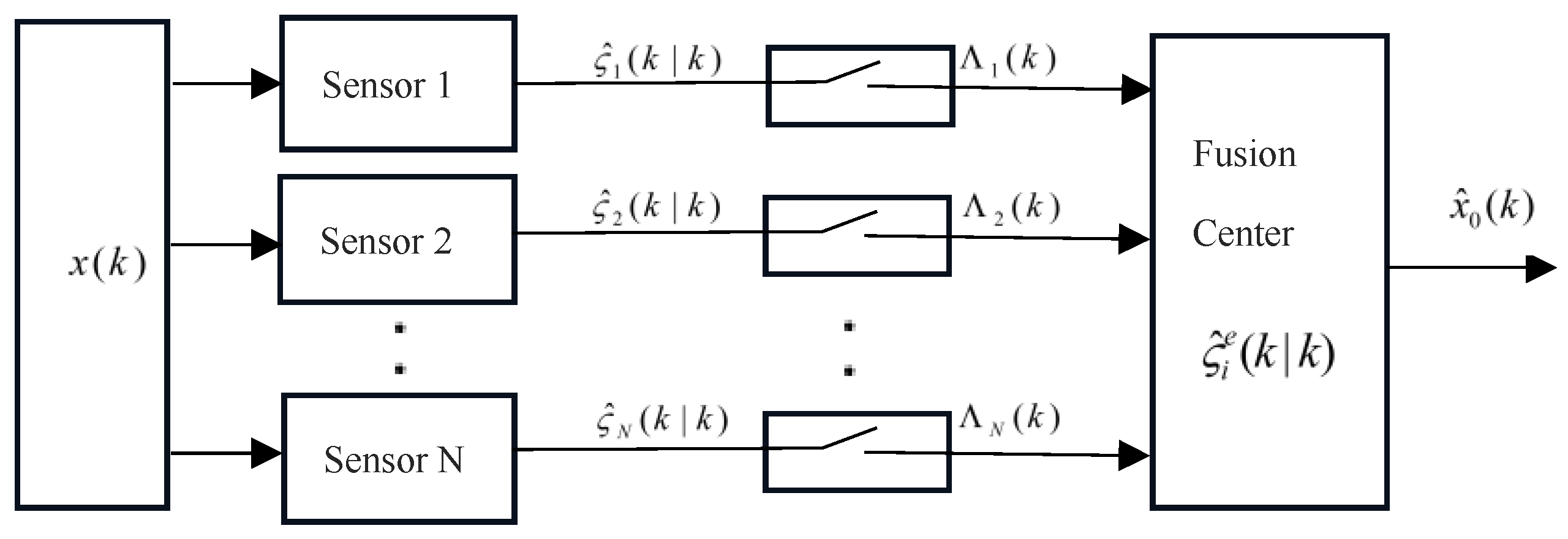
- An ET matrix-weighted DFE algorithm is proposed, which is more practical and energy-saving.
2. Problem Formulation
3. Model Transformation
4. Optimal Local Filters
4.1. Local Filters
4.2. Local Filters in Fusion Center
- (a)
- If and , we have
- (b)
- If and , we have
5. Event-Triggered Distributed Fusion Estimation Algorithm
| Algorithm 1 Asynchronous DFE algorithm with ET mechanism |
Initialization: Set the initial values , , , , , , and m. Iterate: the EECM using (19) in Theorem 1. Step 2: The variance-based ET mechanism is used to determine whether the FC receives LF data. If , the FC obtains LE using (34), and the EECM is calculated using (35), as specified in Theorem 2. If , and are calculated using the one-step prediction, which is stored in the FC; when , they are computed via (36) Step 3: Calculate the EECCMs using (47) in the FC. Step 5: Set , and return to step 1. |
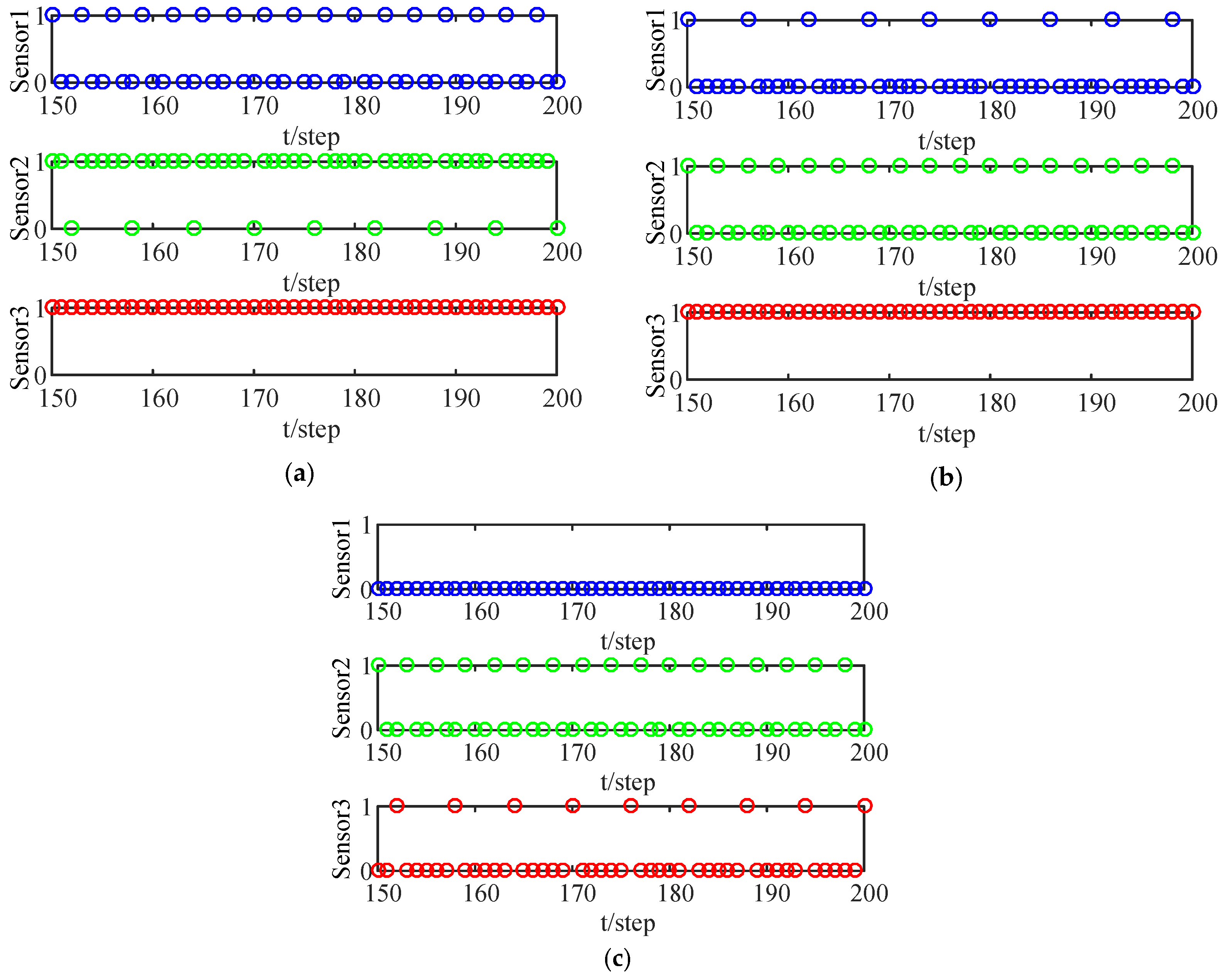
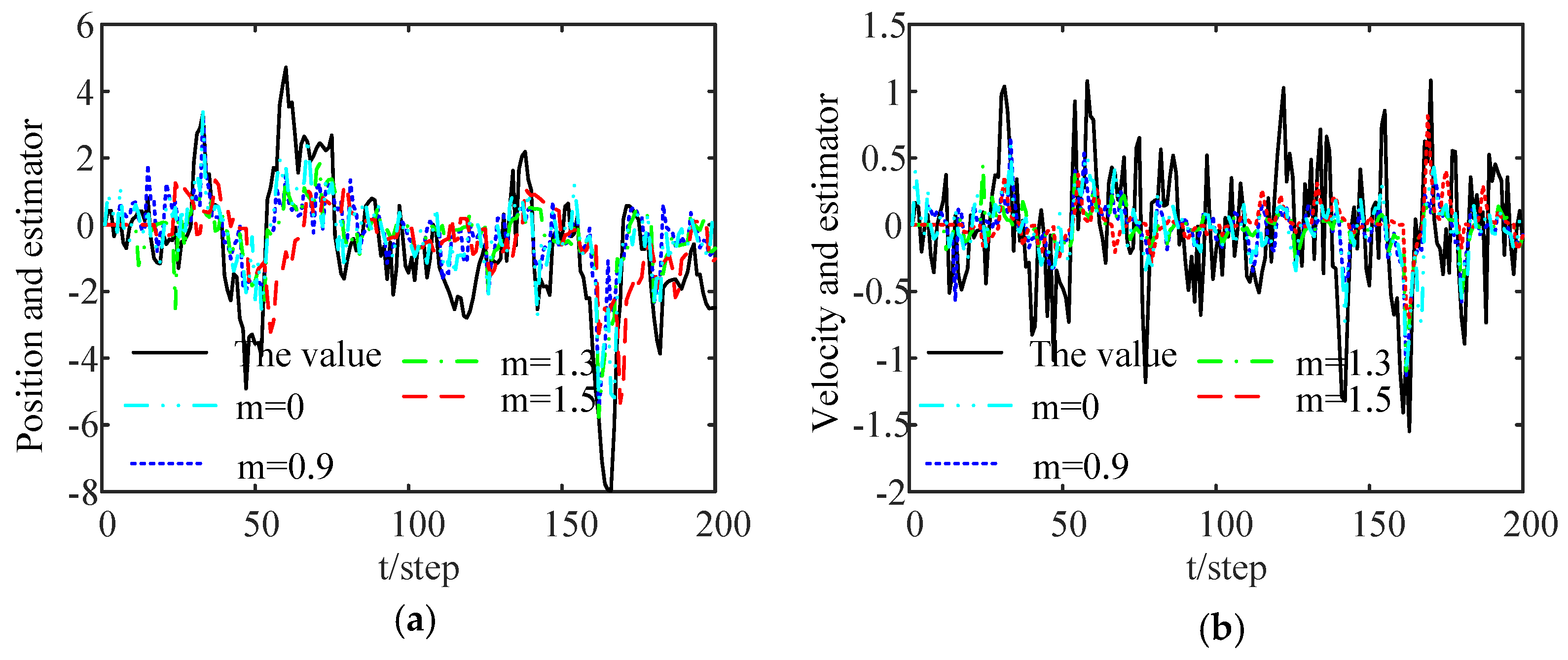
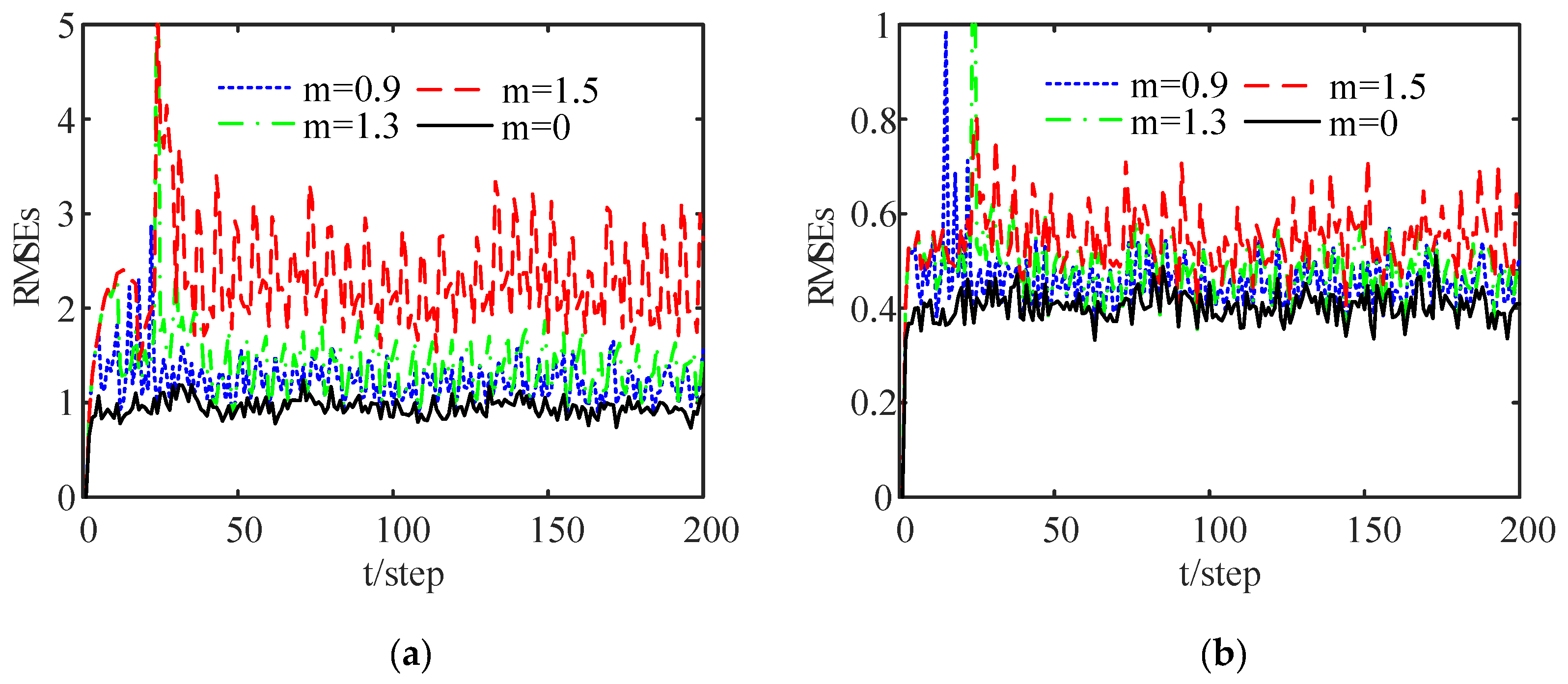
6. Simulation Research
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DFE | Distributed fusion estimation |
| FC | Fusion center |
| FM | Fading measurement |
| CN | Correlated noise |
| MJS | Markov jump system |
| AMJS | Asynchronous Markov jump system |
| ET | Event-triggered |
| LF | Local filter |
| EECM | Estimation error covariance matrix |
| EECCM | Estimation error cross-covariance matrix |
| RMSE | Root-mean-square error |
References
- Yan, L.; Li, X.; Xia, Y. Modeling and estimation of asynchronous multirate multisensor system with unreliable measurements. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2012–2026. [Google Scholar] [CrossRef]
- Albertos, P.; Salt, J. Non-uniform sampled-data control of MIMO systems. Annu. Rev. Control 2011, 35, 65–76. [Google Scholar] [CrossRef]
- Geng, H.; Liang, Y.; Zhang, X.; Yang, F. Fast-rate residual generator based on multiple slow-rate sensors. IET Signal Process. 2014, 8, 878–884. [Google Scholar] [CrossRef]
- Ding, F.; Liu, G.; Liu, X. Partially coupled stochastic gradient identification methods for non-uniformly sampled systems. IEEE Trans. Autom. Control 2010, 55, 1976–1981. [Google Scholar] [CrossRef]
- Tao, J.; Lu, R.; Su, H.; Wu, Z. Filtering of T–S fuzzy systems with nonuniform sampling. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 2442–2450. [Google Scholar] [CrossRef]
- Geng, H.; Liang, Y.; Xu, L. Fault detection for multi-rate sensor fusion under multiple uncertainties. IET Control Theory Appl. 2015, 9, 1079–1716. [Google Scholar] [CrossRef]
- Hu, J.; Wang, Z.; Chen, D. Estimation, filtering and fusion for networked systems with network-induced phenomena: New progress and prospects. Inf. Fusion 2016, 31, 65–75. [Google Scholar] [CrossRef]
- Sun, S.; Lin, H.; Ma, J. Multi-sensor distributed fusion estimation with applications in networked systems: A review paper. Inf. Fusion 2017, 38, 122–134. [Google Scholar] [CrossRef]
- Shen, W.; Zhang, S.; Li, C. Research of Information Fusion and Evidence theory Applied in Structural Damage Detection. In Proceedings of the 2011 Third International Conference on Measuring Technology and Mechatronics Automation, Shanghai, China, 6–7 January 2011; pp. 1075–1076. [Google Scholar]
- Dong, L.; Qiao, Z.; Wang, H. The Gas Leak Detection Based on a Wireless Monitoring System. IEEE Trans. Ind. Inform. 2019, 15, 6240–6251. [Google Scholar] [CrossRef]
- Lin, H.; Sun, S. Distributed fusion estimator for multisensor multirate systems with correlated noises. IEEE Trans. Syst. Man, Cybern. Syst. 2018, 48, 1131–1139. [Google Scholar] [CrossRef]
- Peng, F.; Sun, S. Distributed fusion estimation for multisensor multirate systems with stochastic observation multiplica-tive noises. Math. Probl. Eng. 2014, 2014, 373270. [Google Scholar]
- Lin, H.; Sun, S. Distributed Fusion Estimation for Multi-rate Multi-sensor Time-delayed Systems with Fading Measurements. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 3691–3696. [Google Scholar]
- Liu, Y.; Yan, L.; Xia, Y.; Fu, M.; Xiao, B. Multirate multisensor distributed data fusion algorithm for state estimation with cross-correlated noises. In Proceedings of the 32nd Chinese Control Conference, Xi’an, China, 26–28 July 2013; pp. 4682–4687. [Google Scholar]
- Zhang, Y.; Wang, Z.L.; Zou, Z. Fault detection filter design for networked multi-rate systems with fading measurements and randomly occurring faults. IET Control Theory Appl. 2016, 10, 573–581. [Google Scholar] [CrossRef]
- Qiao, B.; Hu, F.; Su, X. Event-triggered filtering of Markovian jump systems with application to sensor fault detection. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 7810–7813. [Google Scholar]
- Zhang, K.; Keliris, C.; Polycarou, M.; Parisini, T. Discrimination between replay attacks and sensor faults for cyber-physical systems via event-triggered communication. Eur. J. Control 2021, 62, 47–56. [Google Scholar] [CrossRef]
- Costa, O.L.V.; Guerra, S. Stationary filter for linear minimum mean square error estimator of discrete-time Markovian jump systems. IEEE Trans. Autom. Control 2002, 47, 1351–1356. [Google Scholar] [CrossRef]
- Sun, Q.; Lim, C.; Shi, P.; Liu, F. Design and Stability of Moving Horizon Estimator for Markov Jump Linear Systems. IEEE Trans. Autom. Control 2019, 64, 1109–1124. [Google Scholar] [CrossRef]
- Xiong, J.; Lam, J. Stabilization of linear systems over networks with bounded packet loss. Automatica 2017, 43, 80–87. [Google Scholar] [CrossRef]
- Gao, X.; Deng, F.; Zhang, H.; Zeng, P. Adaptive Neural State Estimation of Markov Jump Systems Under Scheduling Protocols and Probabilistic Deception Attacks. IEEE Trans. Cybern. 2023, 53, 1830–1842. [Google Scholar] [CrossRef]
- Geng, H.; Wang, Z.; Liang, Y.; Cheng, Y.; Alsaadi, F. State estimation for asynchronous sensor systems with Markov jumps and multiplicative noises. Inf. Sci. 2017, 417, 1–19. [Google Scholar] [CrossRef]
- Xu, Y.; Wu, Z.; Pan, Y.; Sun, J. Resilient Asynchronous State Estimation for Markovian Jump Neural Networks Subject to Stochastic Nonlinearities and Sensor Saturations. IEEE Trans. Cybern. 2022, 52, 5809–5818. [Google Scholar] [CrossRef]
- Cuenca, Á.; Ojha, U.; Salt, J.; Chow, M.-Y. A non-uniform multi-rate control strategy for a Markov chain-driven Net-worked Control System. Inf. Sci. 2015, 321, 31–47. [Google Scholar] [CrossRef]
- Miskowicz, M. Send-on-delta concepet: An event-based data reporting strategy. Sensors 2006, 6, 49–63. [Google Scholar] [CrossRef]
- Jiang, L.; Yan, L.; Xia, Y.; Guo, Q.; Fu, M.; Li, L. Distributed fusion in wireless sensor networks based on a novel event-triggered strategy. J. Frankl. Inst. 2019, 356, 10315–10334. [Google Scholar] [CrossRef]
- Wu, J.; Jia, Q.; Johansson, K.; Shi, L. Event-based sensor data scheduling: Trade-off between communication rate and estimation quality. IEEE Trans. Autom. Control 2013, 58, 1041–1046. [Google Scholar] [CrossRef]
- Yan, L.; Jiang, L.; Xia, Y.; Wu, Q. Event-triggered sequential fusion estimation with correlated noises. ISA Trans. 2020, 102, 154–163. [Google Scholar] [CrossRef] [PubMed]
- Wang, N.; Sun, S. Event-triggered sequential fusion filters based on estimators of observation noises for multi-sensor systems with correlated noises. Digit. Signal Process. 2021, 11, 102960. [Google Scholar] [CrossRef]
- Wu, P.; Jiang, L.; Wang, L.; Xu, J.; Wang, X. Event-Triggered State Estimation for Wireless Sensor Network Systems with Packet Losses and Correlated Noises. IEEE Access 2020, 8, 216762–216771. [Google Scholar] [CrossRef]
- Trimpe, S.; D’Andrea, R. Event-based state estimation with variance-based triggering. In Proceedings of the 2012 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 6583–6590. [Google Scholar]
- Li, X.; Hao, G. Event-Triggered Kalman Filter and Its Performance Analysis. Sensors 2023, 23, 2202. [Google Scholar] [CrossRef] [PubMed]
- Xia, W.; Xu, S.; Lu, J.; Li, Y.; Chu, Y.; Zhang, Z. Event-triggered filtering for discrete-time Markovian jump systems with additive time-varying delays. Appl. Math. Comput. 2021, 391, 125630. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, Z.; Ao, W.; Shi, P. Improved Dynamic Event-Triggered Robust Control for Flexible Robotic Arm Systems with Semi-Markov Jump Process. Sensors 2023, 23, 5523. [Google Scholar] [CrossRef]
- Liang, T.; Shi, S.; Ma, Y. Asynchronous sliding mode control of continuous-time singular markov jump systems with time-varying delay under event-triggered strategy. Appl. Math. Comput. 2023, 448, 127947. [Google Scholar] [CrossRef]
- Yin, K.; Yang, D. Asynchronous fault detection filter of positive Markov jump systems by dynamic event-triggered mechanism. ISA Trans. 2023, 138, 197–211. [Google Scholar] [CrossRef] [PubMed]
- Talebi, S.; Werner, S. Distributed Kalman Filtering and Control Through Embedded Average Consensus Information Fusion. IEEE Trans. Autom. Control 2019, 64, 4396–4403. [Google Scholar] [CrossRef]
- Sun, S.; Deng, Z. Multi-sensor optimal information fusion Kalman filter. Automatica 2004, 40, 1017–1023. [Google Scholar] [CrossRef]
- Ma, J.; Sun, S. Distributed fusion filter for multi-rate multi-sensor systems with packet dropouts. In Proceedings of the 10th World Congress on Intelligent Control and Automation, Beijing, China, 6–8 July 2012; pp. 4502–4506. [Google Scholar]
- Wang, N. Research on Sequential Fusion Estimation Algorithm for Networked Systems Based on Event Triggering. Master’s Thesis, Heilongjiang University, Haerbin, China, 2021. [Google Scholar]
- Robert, F. Optimal Estimation and Control; Dover Publication, Inc.: New York, NY, USA, 1994. [Google Scholar]
- Anderson, B.D.O.; Moore, J.B. Optimal Filtering; Prentice-Hall: Englewood Cliffs, NJ, USA, 1979. [Google Scholar]
- Tian, T.; Sun, S. Distributed Fusion Estimation for Multisensor Multirate Systems with Packet Dropout Compensations and Correlated Noises. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 5762–5772. [Google Scholar] [CrossRef]
- Lin, H.; Sun, S. Stability Analysis of Distributed Fusion Estimation Algorithm for Complex Networked Systems. Neural Process Lett. 2023, 55, 6781–6795. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, R.; Lin, H. Event-Triggered Distributed Fusion Estimator for Asynchronous Markov Jump Systems with Correlated Noises and Fading Measurements. Sensors 2024, 24, 336. https://doi.org/10.3390/s24020336
Zhang R, Lin H. Event-Triggered Distributed Fusion Estimator for Asynchronous Markov Jump Systems with Correlated Noises and Fading Measurements. Sensors. 2024; 24(2):336. https://doi.org/10.3390/s24020336
Chicago/Turabian StyleZhang, Rui, and Honglei Lin. 2024. "Event-Triggered Distributed Fusion Estimator for Asynchronous Markov Jump Systems with Correlated Noises and Fading Measurements" Sensors 24, no. 2: 336. https://doi.org/10.3390/s24020336