1. Introduction
With the continuous evolution of the Internet of Things (IoT), the vehicle has become an indispensable part [
1]. The trend of IoT leads to the introduction of information technology (IT), software-defined networking (SDN) [
2], and service-oriented architectural design concepts, which give automotive applications great flexibility to deploy, update, and expand the introduction of information technology (IT), and service-based architectural design concepts give automotive applications great flexibility to deploy, update and expand [
3]. A large amount of external data enters the IVN through wireless technologies, such as Wi-Fi, Bluetooth, ZigBee, dedicated short-range communication (DSRC), and long-term evolution (LTE). Diverse upper-layer applications, such as safety-related, entertainment-related, and control-related applpications [
4], also put forward new requirements for the backbone of the IVN. In addition to high speed and high bandwidth, the in-vehicle network also needs to be redundant, scalable, real-time, deterministic, and secure, which cannot be provided by traditional in-vehicle buses such as CAN, local interconnect network (LIN) and media-oriented system transport (MOST). The automotive Ethernet (AE) solves the electromagnetic compatibility problem using traditional Ethernet in the vehicle environment [
5]. The above requirements can be satisfied by optimizing and multiplexing the protocols of different layers in the OSI model to the AE [
6]. BMW proposed the SOME/IP protocol in 2011 as a critical protocol for solving service-oriented communication and was incorporated into the AUTomotive Open System Architecture (AUTOSAR) specification in 2014. Kreissl [
7] obtained the vulnerability of SOME/IP through threat analysis, and some studies have proven that the in-vehicle network can be hacked through external interfaces (Bluetooth, WIFI), operating system vulnerabilities, or malware [
8,
9,
10,
11]. It is evident that SOME/IP has security risks and needs corresponding security measures.
However, there are still some problems in deploying security countermeasures on SOME/IP. First, there is no definition of its security mechanism in AUTOSAR and no standards to guide the deployment of security measures. Second, existing security protocols, such as transport layer security (TLS) and Ipsec, do not fit well in the SOME/IP protocol. Although some papers have studied security protocols specially designed for SOME/IP [
12,
13,
14], forming a standardized module and trade-off between encryption strength and real-time performance is difficult. Third, IDS is also an effective means to detect attacks or network anomalies [
15]. Tobias et al. [
16] also believe that IDS for SOME/IP has opportunities and challenges. Nevertheless, few studies on the IDS for SOME/IP-based AE exist.
The motivations of this work are as follows.
Firstly, different wireless technologies are integrated into cars, which can be an avenue for external attacks. Once the SOME/IP-based in-vehicle network is compromised, the attacker can not only affect the Internet of Vehicles (IoV) application by obfuscating the in-vehicle data but can also directly operate the actuator to cause serious accidents. Therefore, diversified security methods need to be applied to defend against different attacks. In addition, although the security countermeasures based on cryptography can guarantee the confidentiality, integrity, and availability of data, they cannot identify abnormal behaviors in the communication network without attack intervention, such as abnormal traffic caused by sensor failure or administrator misoperation. The in-vehicle network requires IDS for more comprehensive network monitoring and abnormal location. Lastly, few studies and public datasets on the IDS for SOME/IP-based AE exist. This gap urgently needs to be filled.
Based on the above considerations, this paper introduces the attack scenario of SOME/IP-based AE and analyzes the attack on the SOME/IP protocol. An innovative multi-layer intrusion detection system is proposed, incorporating both rule-based and AI-based detection methods. The establishment of the rule set mainly relies on the attack analysis results. AI detection mainly includes data pre-processing, a novel multi-gated recurrent unit (multi-GRU) model, and a Bayesian optimization process. Finally, we implement the proposed IDS and comprehensively evaluate its performance.
The main contributions of this paper are as follows:
We propose SOME/IP data generation methods based on Prescan, Simulink, and CANoe. In addition to the SOME/IP header that satisfies the protocol specification, the method can generate meaningful and relevant in-vehicle network data, such as camera data, ADAS data, body data, and attack data.
We propose a multi-layer intrusion detection system architecture with both rule-based and AI-based approaches. This is the first attempt to detect anomalies simultaneously on SOME/IP header, SOME/IP-SD message, message interval, and payload.
The multi-GRU model is proposed in the AI-based method, and the detection performance is improved by data pre-processing and Bayesian optimization. Multi-GRU is shown to scale well and outperform the single-GRU model.
We implement the IDS proposed in this paper on a laptop and Jetson Xavier NX and evaluate its performance using a simulation database. Experiments show that our proposed IDS has excellent detection accuracy and meets the real-time performance of vehicles.
The paper is organized as follows.
Section 2 discusses the related work.
Section 3 presents the vulnerability of SOME/IP. In
Section 4, the proposed multi-Layer IDS is introduced, mainly including rule-based and AI-based modules.
Section 5 presents the result of the experiment and discusses the vehicle’s real-time performance.
Section 6 is the conclusion of the paper.
3. Vulnerability of SOME/IP
SOME/IP is built on the TCP/UDP protocol and is located above the fourth layer of the OSI model. Its purpose is to define a unified middleware for IP-based communication within the vehicle. SOME/IP is one of the critical components to realizing the in-vehicle network communication under the service-based architecture. We first introduce the communication process of SOME/IP and clarify the application scenarios of Event and Remote Procedure Call (RPC) packets in SOME/IP. Then, we analyze its attack scenarios and attack types on SOME/IP protocol.
3.1. SOME/IP Overview
The communication based on SOME/IP is divided into two phases. The first is the service discovery process, specified by SOME/IP Service Discovery Protocol [
47], and the second is the normal communication process, specified by SOME/IP Protocol [
48]. The SOME/IP-SD message and SOME/IP message format are shown in
Figure 1.
The service discovery process is performed when the system starts, including three phases: initial wait, repetition, and main. Servers and clients notify each other of service information through SOME/IP-SD messages, consisting of the entries array and options array.
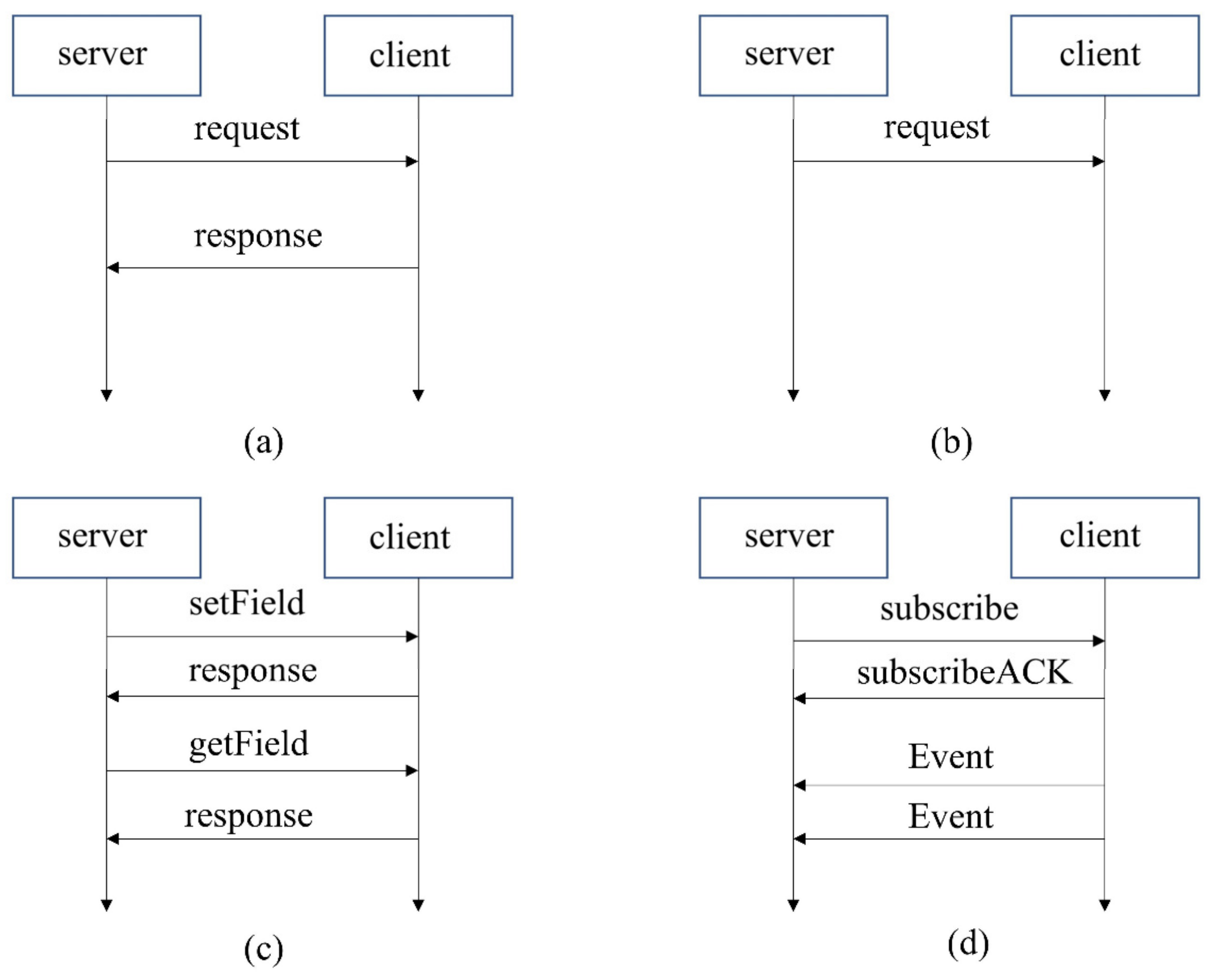
A service consists of combinations of zero or multiple events, methods, and fields. Events provide data sent cyclically or on change from the provider to the subscriber. A field does represent the status and thus has a valid value at all times upon which the getter, setter, and notifier act. The communication of SOME/IP relies on RPC and Publish-Subscribe. RPC allows the client to call methods in the server. RPC contains two modes, Fire & Forget and Request-Response. The difference is that Fire & Forget does not need a response. Events in the service can only be transmitted after they have been subscribed. Operations of the field are special since the setter and getter of the field belong to Request-Response-RPC, while the notifier of the Field needs to be subscribed like an event. The communication paradigm of SOME/IP is shown in
Figure 2.
In SOME/IP communication, events and RPC often act on different types of vehicle data. Since autonomous driving control algorithms require periodic and continuous inputs, the event is more suitable for real-time control and is primarily a fundamental signal. If the self-driving application uses RPC to trigger related calculation signals, it will increase the network load and reduce the real-time performance, resulting in a poor control effect. In contrast, RPC is more suitable for the interaction between humans and the vehicle or the control of body parts with low real-time requirements, such as calling the air conditioning control method or the turn signal control method through RPC.
3.2. Attack Scenario
Figure 3 shows a zonal automotive electrical and electronic architecture (EEA). The automotive Ethernet is used as the backbone network to connect the zonal control unit (ZCU), central compute unit (CCU), rear seat entertainment (RSE), and telematics box (T-Box) in a star topology. SOME/IP runs as an upper-layer protocol in the backbone network. Four ZCUs are in charge of each of the four zones in the left, right, front, and rear of the vehicle. Each zone’s actuators, sensors, and sub-ECUs are connected to the ZCU via CAN or Ethernet. There are various external interfaces including Bluetooth, cellular network, GPS in RSE, CCU, and T-Box. Due to the need to perform diverse tasks such as information fusion, route planning, infotainment, etc., these electronic units are equipped with diverse operating systems such as Android, QNX, and Linux. An attack from the outside to the in-vehicle SOME/IP network is possible under the above EEA.
Due to the fixed topology of the AE-based IVN and the point-to-point communication method, it is almost impossible to attack the in-vehicle network by mounting malicious communication nodes directly, except in the ideal case. However, an attacker can infiltrate the SOME/IP network outside. A more feasible approach is that an attacker attacks straight from the data source, such as spoofing the camera, causing the speed sensor to have measurement errors, etc. In this scenario, all ECU nodes in the IVN are normal and communicate as expected. Moreover, there may be vulnerabilities in applications, operating systems, or virtual machines. It is possible to gain access to data or the network through these vulnerabilities or malicious software. For example, when an attacker obtains permission to operate the transmit interface of SOME/IP packet, attacks such as replay, tamper, fuzzy, and denial of service (DoS) can be launched on the network.
3.3. Attack of SOME/IP
3.3.1. Fuzzy
Targets of fuzzy include the header of the event and RPC, service entries array, and option array in the service discovery packet. Fuzzy can also be understood as random or traversal tampering.
3.3.2. Spoof
Spoof is considered an upgrade of Fuzzy. In our definition, the targets of Fuzzy do not contain the payload. The Fuzzy on the payload is invalid if the SOME/IP header does not match the requirements. Spoof means that the attacker can send the header of SOME/IP as required and tamper or replay the payload of the event at the same time. This requires a higher level of mastery of communication systems.
3.3.3. DoS
DoS refers to the attacker congesting the network by modifying the cycle of periodic Events or SOME/IP-SD packets. DoS can also be achieved by injecting large amounts of traffic unrelated to SOME/IP. Nevertheless, this is not a SOME/IP level attack, and we can solve such DoS from the data link layer by introducing a flow meter or IEEE 802.1Qci [
49].
3.3.4. Abnormal Communication Process
The abnormal communication process mainly involves the four steps mentioned in the paper [
44], including error on error, error on event, missing response, and missing request.
3.3.5. Unauthorized Operation
Unauthorized operations do not exist in conventional CAN buses, which is mainly manifested in unauthorized subscription, unsubscription, provision of services, and unauthorized RPC calls. The services or RPCs here are defined in the system but have not been authorized by the upper application.
4. Proposed Multi-Layer IDS
4.1. Dataset Generation
So far, there is no recognized SOME/IP dataset for intrusion detection in the industry. Since SOME/IP-based service-oriented communication has not been widely deployed in mass-produced vehicles, actual vehicle data communicating via SOME/IP cannot be collected. The literature [
45] provides a SOME/IP data generator, but this generator can only generate the header of SOME/IP and fill in the payload with random numbers or fixed values. This makes it inconvenient to conduct a comprehensive intrusion detection study. The toolchain of Prescan, Simulink, and Vector CANoe is used to build the SOME/IP dataset to fill this gap. Prescan is a simulation platform for ADAS function development, which integrates modules involved in intelligent driving simulation, such as road scenes, smart cars, sensor models, vehicle dynamics configuration, and environmental perception. Simulink is a block diagram environment for modeling, analyzing, and simulating dynamic systems. CANoe is a bus development environment produced by VECTOR, which can be used for modeling, simulation, testing, and development of automotive buses. Simulating the ADAS function with Prescan and Simulink is one of the most common methods nowadays. Moreover, CANoe produced by Vector is widely used for in-vehicle network simulation and testing. Through this toolchain, traffic that meets the protocol requirements and has ADAS meaning can be generated. The data generation process is shown in
Figure 4.
Prescan is first used to design and build vehicle simulation scenarios. Road elements such as vehicles and road signs can be added according to actual needs. A detailed set of parameters constrains each element. For example, the weight, wind resistance, running trajectory, dynamic parameters, etc., can be set for vehicle elements. The simulation scenarios and parameters defined in Prescan are then imported into the vehicle dynamics model and application sub-functions built in Simulink. Interrelated data in the simulation environment can be obtained, such as the sensor data, vehicle speed, throttle opening, hydraulic braking force, etc. The above data are then imported into CANoe and encapsulated by the SOME/IP protocol stacks implemented by the communication access programming language (CAPL). According to the defined service framework, these SOME/IP messages are transmitted between simulation nodes in CANoe. Finally, these messages are recorded through the logging file and form a CSV database through Python. The attack script is coded with CAPL and embedded in the emulation node. The attack can be executed via the panel, similar to the attack through the APP backdoor. It should be noted that this is not an actual attack scenario, but the same attack effect can be obtained.
4.2. System Structure
The multi-layer IDS consists of rule-based detection and AI-based detection. The models in AI-based detection are trained before the IDS works appropriately.
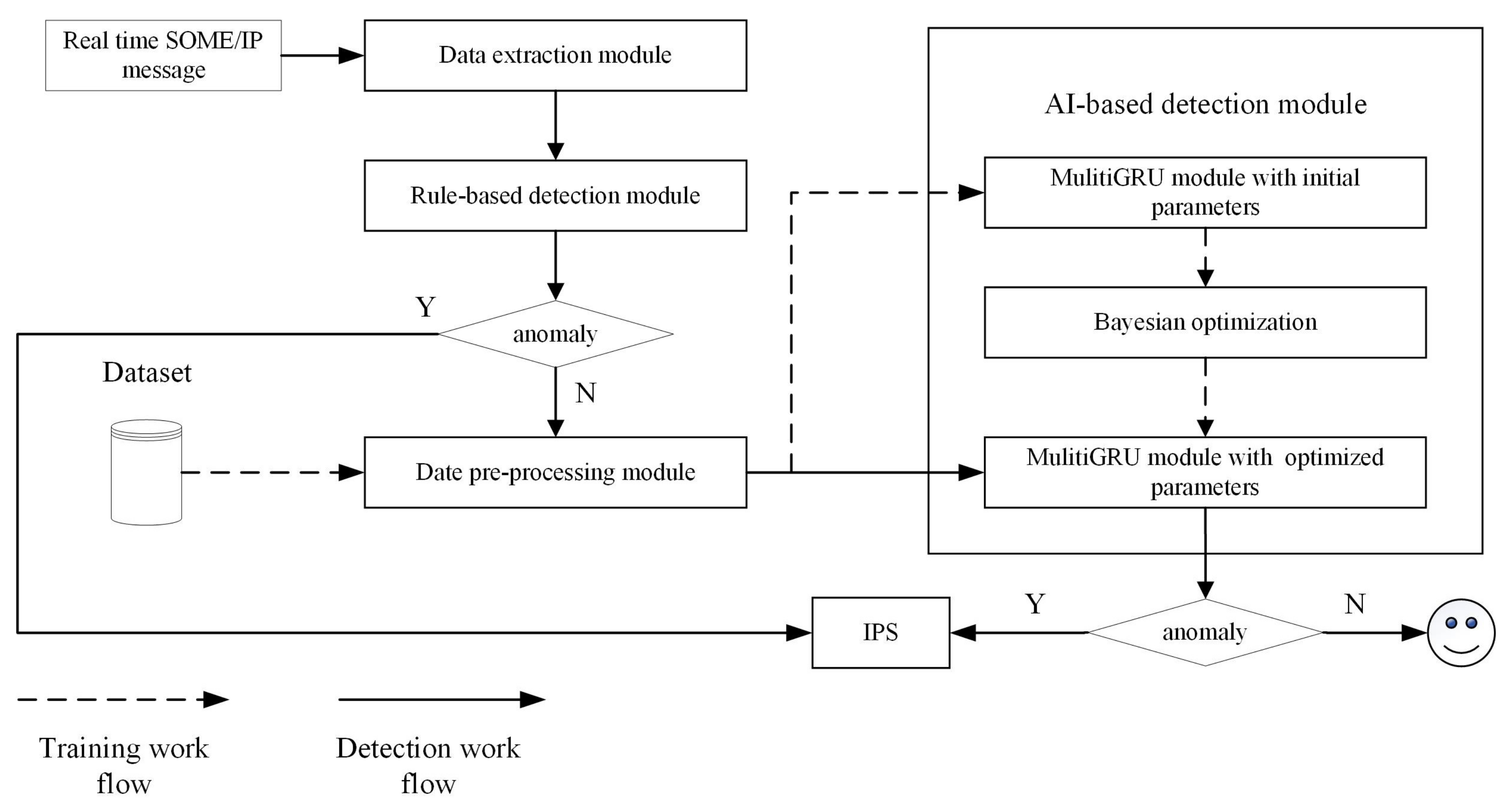
Figure 5 describes the system architecture of multi-layer IDS and reflects its workflow. In the training phase, the data are imported from the database into the data pre-processing module, which includes feature deserialization, normalization, and sequence generation. Sequence enters the initial multi-GRU model for training, and Bayesian optimization is used to obtain the hyperparameters of the model. During the detection phase, real-time SOME/IP packets flow from the IVN to the IDS. The packet enters the data extraction module, where the features for IDS are extracted. These features first enter the rule-based intrusion detection module. When all the rules are passed, the event packet will go through the pre-processing module to generate the feature sequence and enter the AI detection module. Other types of packets will jump out directly after entering the AI detection module and are marked as normal. When the results of both detection modules are normal, the packet is classified as normal. If any rules are not satisfied or the detection result of AI-based IDS is abnormal, the IPS will trigger related protection mechanisms, such as alerting, isolation, etc.
The detection range of our proposed multi-layer IDS list is outlined in
Table 2. Except for unauthorized operations, the attacks mentioned in
Section 3.3 can be detected by the proposed multi-layer IDS. For example, the driver can control the radio volume after the vehicle ignition, in which case an authorized RPC is generated. However, the attacker can issue an unauthorized RPC to control the radio volume anytime. The context of these two messages in the network is irregular. Such an attack cannot be identified at the network level if the service encapsulating RPC is offered. Hence, NIDS is only one part of the defense-in-depth system. Unauthorized operations must be defended by application probes, access control, or a host-based intrusion detection system (HIDS).
4.3. Data Extraction Module
Data extraction is a layer-by-layer unpacking process necessary for Ethernet communication. Each time the initial SOME/IP packet passes through a layer of the OSI model, the header of that layer will be added. After unpacking, the features for detection can be obtained.
4.4. Rule-Based Detection Module
All SOME/IP packets are first subjected to rule-based detection, which can detect anomalies in the SOME/IP-SD packet, SOME/IP header of event and RPC, and communication process. Each message ID, consisting of service ID and method ID, as shown in
Figure 1, corresponds to a rule group. The rule group includes static field rules, dynamic field rules, and communication state rules. These rules will be judged in turn. As soon as a rule is not satisfied, an anomaly is flagged and pops up immediately. The packet is also marked as an anomaly if there is no corresponding message ID in the module. Parameters in the whole rule-based detection module are listed in
Table 3.
The static fields mainly include IP Address, MAC address, port number, message ID, protocol version, interface version, message type, and information in the entries array and options array. These fields and their matching relationships are fixed after completing the service architecture and network topology design, such as the services the nodes can provide, the methods or event groups contained in the services, etc. Service description files can be extended through software-over-the-air (SOTA). In this case, static rules also need to be updated synchronously.
Dynamic fields refer to the timestamp of the SOME/IP packet and session ID in the SOME/IP header. The growth logic of session ID is defined in the specification [
48] in detail. Attacks not complying with the session ID growth rules can be easily detected by checking this field, such as replay, tamper, and injection without the correct session id. Since SD and event packets are sent periodically, the injection of periodic packets can be detected by comparing the frame interval calculated by the timestamp with the set threshold.
The communication status rule detects the four process errors defined in the paper [
44], error on error, error on event, missing response, and missing request. The rule-based module will cache the information of the previous packet. For example, after receiving a response-type SOME/IP packet, the module will check whether the previous frame of the same message ID is the request type.
4.5. Data Pre-Processing Module
4.5.1. Deserialization and Data Restoration
Before filling the SOME/IP payload, the data will be serialized and converted to hexadecimal according to IEEE 754. A double-precision floating-point number takes 8 bytes. Both alignment and struct unwinding in serialization consume extra bytes. In order to reduce the feature dimension, the payload is converted into the real signal value through deserialization and data restoration.
4.5.2. Data Normalization
Because the dimension of the actual signal is different, signals in each message ID are normalized separately, which can make the gradient descent process converge faster and improve training efficiency. At the same time, it is also avoided that the value range of different signals varies widely, resulting in poor model accuracy. The value of the normalized feature is denoted by:
where
is the maximum value of features and
is the minimum value of features.
4.6. AI-Based Detection Module Multi-GRU
4.6.1. GRU
GRU aims to solve the vanishing gradient problem, which comes with a standard recurrent neural network. The internal structure of GRU is shown in
Figure 6. Compared with LSTM, GRU has only two gates, called the reset gate and the update gate. The update gate helps the model determine the amount of past information from previous time steps that must be passed along to the future. The reset gate decides the amount of past information to forget. The reset gate
can be calculated by the following equation:
The update gate
can be denoted by:
The candidate state
can be expressed as:
The hidden layer output
is described as follows:
where
,
and
are the weight matrices of input
;
,
and
are the weight matrices connected with the hidden layer output
;
is the bias.
Figure 6.
The principle of GRU.
Figure 6.
The principle of GRU.
4.6.2. Architecture of Multi-GRU
Multi-GRU is a scalable supervised learning architecture with GRU as the core unit, as shown in
Figure 7. Each message ID corresponds to a stacked GRU with a depth of 2. Increasing the network depth is intended to improve the efficiency and accuracy of model training and detection. The hidden layer outputs of all stacked GRUs are concatenated together to increase data interconnection between message ids. The classification results are obtained through the linear layer and the softmax activation function.
For a clear description, some symbols are first introduced, and the message ID is noted as id.
is the set of all IDs. N is the number of elements in the ID, that is, the total number of IDs. Note the set X
, whose elements are the number of signals corresponding to the ID. Therefore, the total number of signals in the system is sum(X). Note that the set
contains the number of corresponding IDs in a sequence. Sum(L) represents the total length of a packet sequence.
is the hidden layer size for each signal. The parameters of the model are listed in
Table 4.
Compared with the single-GRU model, the proposed multi-GRU model has better scalability. The number of IDs increases as the system expands. According to actual design requirements, the ID and signal may be 1-to-1 or 1-to-x. The extreme case is that all IDs have a 1-to-1 relationship with signals, which is also allowed and recommended for service-based communication. In the 1-to-1 case, the relationship between the number of parameters and N for the single-GRU and multi-GRU models is shown in
Figure 8. When
is 5 and N reaches 40, the multi-GRU model has 12,000 model parameters, while the parameters of the single-GRU model are about 500,000, which is close to 40 times that of the former. The growth rate of single-GRU increases with N, which is a constant in the multi-GRU model.
4.6.3. Model Hyperparameters
Adam is used for optimizer and cross-entropy for the loss function. Adam absorbs the advantages of Adagrad (adaptive learning rate gradient descent algorithm) and momentum gradient descent algorithm, which can adapt to sparse gradients and alleviate the problem of gradient oscillation. Hence, the model hyperparameters are the hidden layer size
, the learning rate lr, and the smoothing parameters β1 and β2 of the Adam optimizer. If the hyperparameters are not correctly chosen, the training process will be unstable and ineffective. Manual selection of hyperparameters is inefficient and has difficulty with obtaining optimal solutions, so Bayesian optimization is used to calculate hyperparameters automatically. Bayesian optimization uses Bayes’ theorem to estimate the posterior distribution of the objective function based on the data and then selects the next sampled hyperparameter combination based on the distribution. It makes full use of the information from the previous sampling point. Its optimization works by learning the shape of the objective function and finding the parameters that improve the result to the global maximum. The Bayesian optimization objective is the model accuracy of threefold cross-validation. The optimized hyperparameters and ranges are shown in
Table 5.
The mean and standard error of the threefold cross-validation accuracy under different hyperparameters are shown in
Figure 9. This figure intuitively shows the influence of hyperparameters on the accuracy of the model. The closer the distribution of error and standard error are to the center of the contour, the better the hyperparameters are.
5. Performance Evaluation
5.1. Data Description
The dataset was generated by the method described in
Section 4.1. The simulation environment is an adaptive cruise control (ACC) scenario, and the service and signal definitions are shown in
Table 6. The dataset contains the SOME/IP-SD packet, four events, and two RPCs. The event is sent periodically, and RPC is triggered via the CANoe panel.
The dataset is divided into two parts for validating rule-based and AI-based detection. The full dataset and its detailed description are available in git [
50]. For the evaluation of rule-based detection, there are 144,574 packets in total, of which 89,564 are anomalies. Details are shown in
Table 7.
There are 2480172 original data samples in the evaluation of AI-based detection. A total of 82625 message sequences are obtained with a sequence length of 91 and a sliding step of 30. At the beginning of our experiments, we found that a low sequence length leads to a low replay attack detection rate. After coarse-grained tuning, the sequence length was determined to be 91, seven times the number of messages in one communication cycle in the dataset. The sliding step was empirically determined to be 30% of the sequence length. If the sliding step is too small, too much redundant information will be generated, leading to over-fitting of the training. If the sliding step is too long, it will lead to the omission of crucial information and a reduction in the amount of data. We use an 80–20% train-test split to generate a training set with 80% of data samples and a test set with 20% of data samples. The test set will remain untouched before the final hold-out validation. The class label and size of the dataset for AI-based detection are shown in
Table 8. It should be pointed out that the header and cycle of tamper and replay attacks meet the system requirements. We can assume that the attackers have successfully spoofed the rule-based IDS and impersonated the nodes loaded with these services. So, these attacks will focus on the payload.
5.2. Experiment Setup
The development platform is a laptop with an IntelI CITM) i7-8750H CPU @ 2.20 GHz and 16 G of memory. The detection performance and computational performance of multi-GRU and single-GRU are verified and compared on this platform. The experimental platform is a Jetson Xavier NX with a 384-core NVIDIA VoltaTM GPU, two deep learning acceleration engines, a 6-core NVIDA Carmel ARMv8.2 64-bit CPU, and 8G of memory. The Jetson Xavier NX is an embedded edge computing device with only 15 W power consumption and 21 TOPS of computing power. With only the CPU, its arithmetic power is roughly the same as that of the Raspberry Pi 4B. On this platform, we perform a vehicle-level real-time analysis of the proposed multi-layer IDS, including the detection time of the rule-based module and the detection time of the AI-based module with CPU or GPU acceleration, respectively.
5.3. Evaluation for Rule-Based Detection
The experiments show that the proposed rule-based detection has a 100% detection rate in the above dataset. This result is understandable because rule-based judgments are rigorous. Real-time performance is another primary metric in rule-based detection. This paper does not store the rules in the rule base but deploys them in the software code in the form of logical judgment. Such an implementation will not consume additional memory of a rule base, nor will it affect the real-time performance due to the retrieval of the rules, which is more suitable for the embedded environment. Due to positive logical judgments (as a whitelist), packets that do not meet the conditions are immediately considered abnormal. Therefore, it takes the longest time to judge a normal packet, and this time is used to evaluate its time performance. The average detection time of each packet is about 29.394 us on the Jetson Xavier NX. After the packet enters the system, it will enter the corresponding rule set according to the message id. Thus, its inference time hardly increases with the system’s expansion.
5.4. Evaluation for AI-Based Detection
In addition to real-time performance, there are some other metrics in the evaluation of AI-based detection, including the accuracy (Acc), precision, recall, and F1-score, which are calculated as follows.
where TP, TN, FP, and FN represent true positives, true negatives, false positives, and false negatives. The area under the ROC curve (AUC) was also used to judge the model’s classification accuracy. The performance of the multi-GRU model is compared with that of a single-GRU to illustrate the advantage of the proposed model. The hyperparameters of both models were tuned by the Bayesian process for a better comparison and are listed in
Table 9.
In
Figure 10, it is evident that the loss of the multi-GRU model converges faster and closer to zero during training. The training loss is close to 0 in less than 60 epochs in multi-GRU training. On the contrary, after 250 epochs in single-GRU training, the training loss is still a little far from 0. The detection performance of the two models against different attack types is listed in
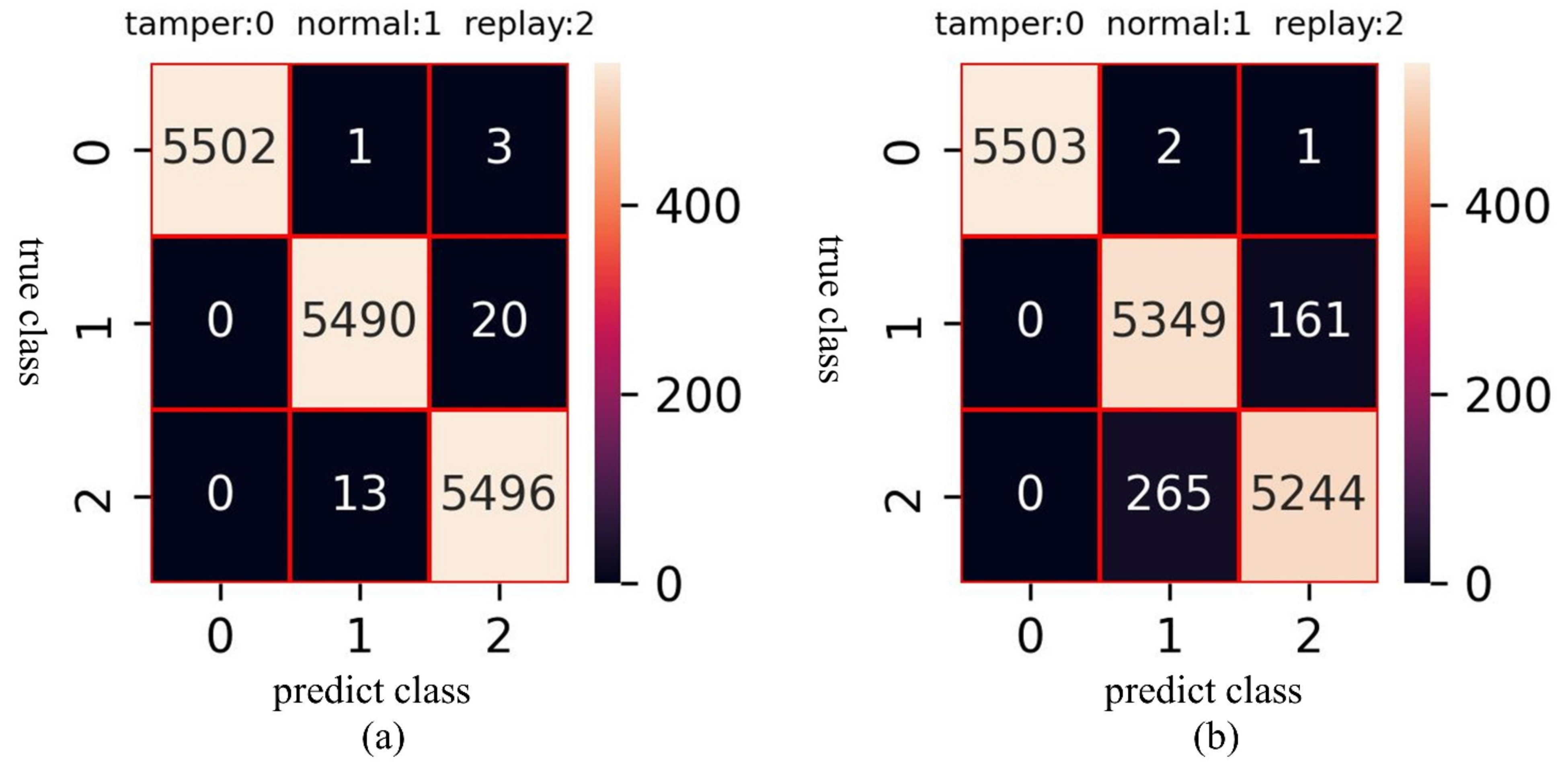
Table 10. It can be found that the multi-GRU model has excellent detection performance for tamper, normal, and replay, and the accuracy is as high as 99.77%. In contrast, although the single-GRU model also has a very high detection rate for tamper data, its detection performance in the replay and normal data is poor. The accuracy of this model is 97.4039. A more intuitive classification result can be shown in
Figure 11. It can be found that the single-GRU model has serious misjudgments between replay and normal data.
Table 11 compares the computational performance of the two models on a laptop. The detection time of multi-GRU for a sequence is 21.5838 ms, which is nearly 10 ms less than that of single-GRU. Since the evaluation data set contains only one ACC application and only four message IDs of the event, the number of model parameters of single-GRU is slightly less than that of multi-GRU. However, according to the scalability analysis in
Section 4.6.2, as the system expands, the number of model parameters of multi-GRU will far exceed that of single-GRU. Floating-point operations per second (Flops) can also demonstrate the advantages of multi-GRU in computing performance. The Flops of single-GRU are quintuple that of multi-GRU.
It is noted that the inference time includes the data pre-processing time and model calculation time. We compared the composition of the inference time of multi-GRU using a Jetson Xavier NX with CPU or GPU acceleration, as shown in
Table 12. The GPU quadruples the model computation speed but has little effect on the speed of data pre-processing. This result demonstrates the computational potential of the proposed model under GPU acceleration. Data pre-processing time can be further reduced by dedicated chips or more efficient data processing algorithms, but this is not the focus of this paper. The inference time for the Jetson Xavier NX is less than 1 ms regardless of whether GPU acceleration is used.
5.5. Performance of Resistance to Sample Imbalance
In the actual vehicle scene, sample imbalance often occurs. The performance of the model under unbalanced samples is also an important indicator. Mild, moderate, and extreme sample imbalance scenarios are tested, where the ratio of abnormal data to normal data, denoted as the ratio later, is 40%, 20%, and 1%, respectively.
Table 13 shows the performance of the proposed multi-GRU model and the traditional single-GRU model for the above scenarios. The balanced test dataset is used so that the performance of the model trained in the unbalanced sample environment is better represented. Generally, the proposed multi-GRU model has a solid resistance to sample imbalance. At ratios of 40% and 20%, the recall of replay attacks can still be maintained at about 90%. In contrast, the replay attack is already undetectable at a ratio of 40% under a single-GRU model. The training of the single-GRU model fails to converge under sample imbalance, and the loss fluctuates between 0.3 and 0.4. In the case of extreme sample imbalance (ratio = 1%), the multi-GRU model also exhibits poor performance, which is unavoidable because the number of negative samples is too small to extract enough features during the learning process. For this case, it is necessary to use oversampling, weight distribution, or data generation algorithms to balance the samples, which is not the research content of this paper. With the dataset generation method described in
Section 4.1, we can set the experimental scenario and attack injection frequency to adjust the total number of samples and the ratio of abnormal data to normal data.
5.6. Vehicle-Level Real-Time Analysis
In the IEEE 802.1DG seminar, the in-vehicle network traffic and its real-time requirements are defined in
Table 14.
The time of rule-based detection is only 29.394 us per packet for the Jetson Xavier NX, which fully meets the vehicle-level real-time performance requirements. However, event pavoltckets must go through two layers of the proposed IDS simultaneously. Therefore, the detection time of an event is the sum of rule-based detection and AI-based detection. In NX, the average detection time of each event packet is 0.3958 ms with GPU acceleration and 0.6669 ms with only the CPU. In terms of the detection time of a single packet, this also meets the real-time requirement. Nevertheless, it should be pointed out that the detection unit of RNN is a sequence. It is technically challenging to achieve real-time detection unless the sequence sliding step is 1. We believe that the number of packets inferred per unit time is also a metric for evaluating real-time performance. If this metric exceeds the number of packets appearing in the network per unit time, undetected packets are not continuously accumulated, resulting in an untimely response.
Our proposed multi-layer IDS can process 2526 event packets per second with GPU acceleration and 1499 with only a CPU converted from the above statistics. Since there are no real vehicle SOME/IP data, it is impossible to give a quantitative analysis of the real-time performance of the real vehicle. As described in
Section 3.1, a periodic event is mainly used for real-time control. The variety of real-time control messages is limited and mainly comes from the base services in the chassis, power, and ADAS domains. It can be predicted that there will be no more than 40 real-time control signals in the IVN, such as braking force, throttle opening, data processed by sensors, etc. Since the automotive Ethernet is a point-to-point connection, the arrangement of the IDS determines the amount of traffic flowing through it. If the distributed arrangement is adopted, the number of events in a single link is roughly consistent with the simulation data in this paper (13 signals, 325 event packets per second), so the proposed multi-layer IDS can meet the real-time requirements. If the proposed multi-layer IDS is deployed at a central gateway or central calculation unit to form a centralized IDS, the number of model parameters in AI-based detection increases due to more signals. The rising metric and declining computing performance may prevent the proposed multi-layer IDS with only the CPU from meeting the real-time requirement. To solve this problem, we can also select the more critical traffic in the network to be detected during the centralized arrangement or use GPU acceleration.
However, whether using a CPU or GPU acceleration, not all anomalous threat detection has the highest priority. This means that resources inevitably need to be prioritized in resource-constrained vehicle scenarios to meet safety-related operations of IoV, such as GPU requirements for ADAS or autonomous driving applications. The impact of different batch sizes on GPU acceleration performance is shown in
Table 15. Received data can be stored when GPU resources are temporarily constrained. We can detect large batches of data when the GPU is idle or periodically to achieve time-sharing utilization of the GPU and higher GPU efficiency. The batch size needs to be chosen according to the actual resource usage.
6. Conclusions
This paper proposes a multi-layer intrusion detection system for SOME/IP-based in-vehicle network communication. The first-layer rule-based detection module is mainly for SOME/IP-SD and SOME/IP header Fuzzy, DoS, and the abnormal communication process. The average detection time of each packet for a Jetson Xavier NX is 29.394 us. The second-layer AI-based detection module is mainly used to detect spoof attacks on the event. In this module, this paper proposes the model structure of multi-GRU, and experiments show that this structure has higher detection accuracy and computational efficiency than the single-GRU model. The AI-based detection module with multi-GRU has a detection accuracy of 99.7761% for spoof attacks and can distinguish the type of attack on the payload, 100% for Tamper, 99.7456 for Normal, and 99.5833 for Replay. The total time consumption of the multi-layer IDS for the Jetson Xavier NX is 0.3958 ms with GPU acceleration and 0.6669 ms with only the CPU.
After vehicle-level real-time analysis, our proposed multi-layer IDS has better computational potential with GPU acceleration and is more suitable for distributed layout or only to select critical ADAS traffic for detection in a centralized layout. This paper also proposes a SOME/IP dataset establishment method to make up for the deficiencies in the dataset of SOME/IP.
In future work, we need to further investigate the GPU acceleration policy in resource-constrained environments and expand the dataset to verify the performance of the proposed IDS under large-scale networks or on real car data if possible. The HIDS also needs to be studied to address unauthorized calls in SOME/IP.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}