According to the scene of the user sitting in front of the screen and looking at the screen, we generated the required parameters using the Gullstrand–Le Grand eyeball model and the human average [
22]. The coordinates of the left corneal centers were randomly generated within a certain range (
x: from −45 mm to −15 mm,
y: from −90 mm to −50 mm,
z: from 350 mm to 650 mm), so the right corneal centers were determined with the constraint that the distance between the 3D corneal centers of the left and right eyes is 60 mm. According to the defined screen, whose corner points were (−200, 262.045317, 250.064495), (200, 262.045317, 250.064495), (200, 69.209034, 20.251162), and (−200, 69.209034, 20.251162), an equal number of on-screen gaze points to the number of corneal centers were randomly generated. Thus, the VA direction was determined using the 3D corneal center and the gaze point. Due to the theoretical range of kappa angle, we set the horizontal component of the kappa angle to 5
and the vertical component to 1.5
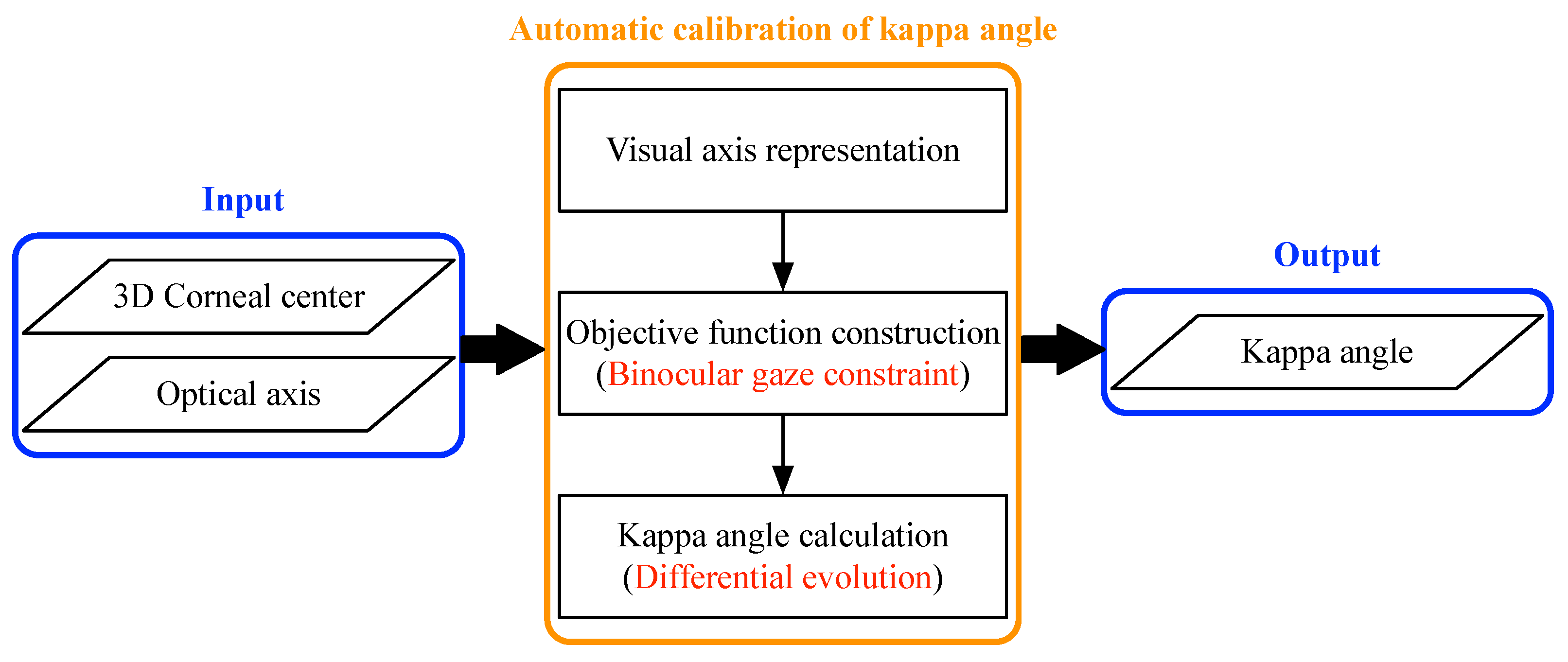
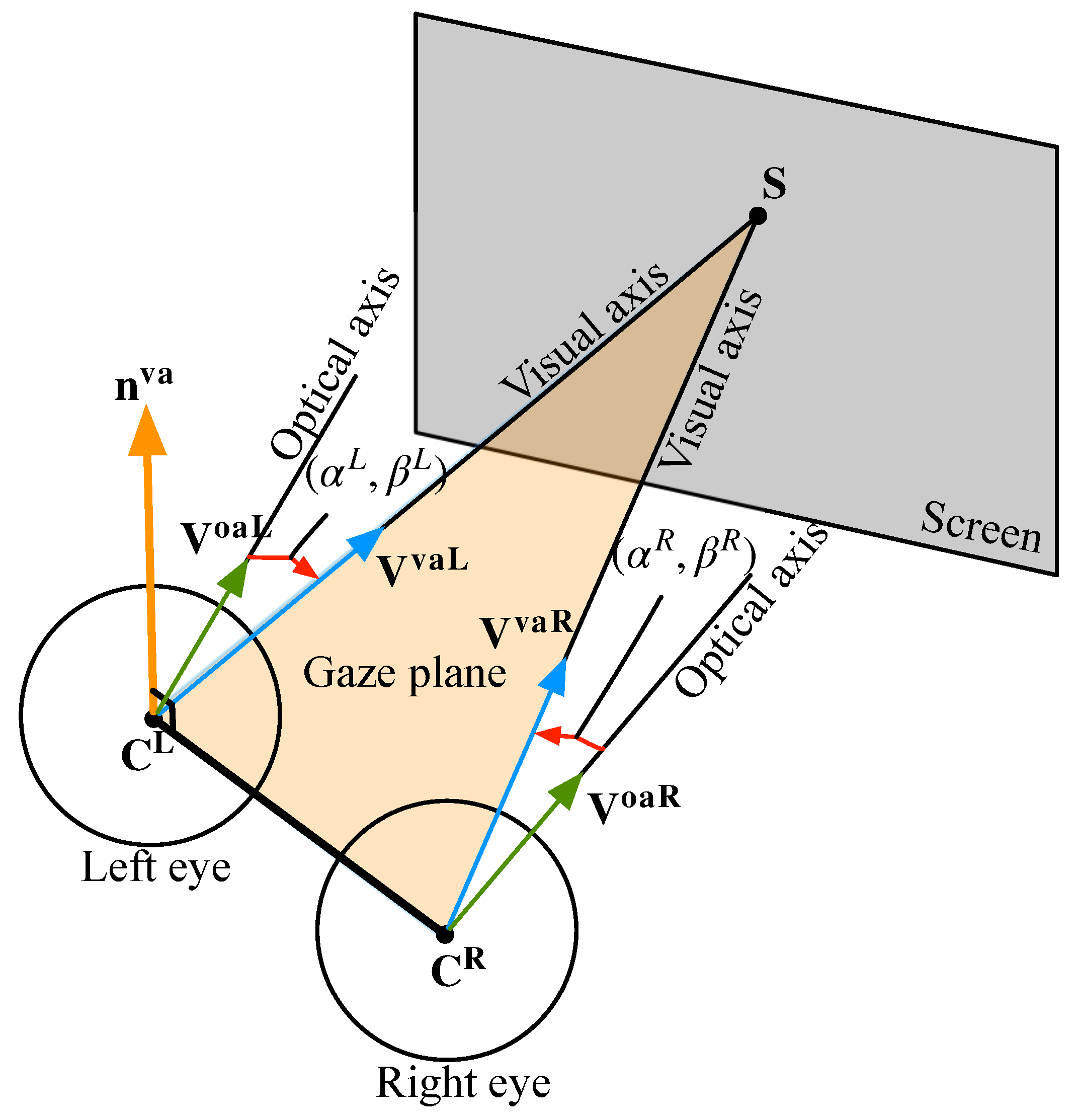
. The required OA direction was determined in reverse by using the 3D corneal center, the VA direction of the eyeball, and the kappa angle. The inputs of the model in this paper were 3D corneal centers and OA directions of the left and right eyes, and the output was the calibrated kappa angle. The accuracy and robustness of the model were verified by comparing the predicted and the set kappa angles.
4.1.1. Algorithm Verification
We calibrated the kappa angle by using nine groups of data including 3D corneal centers and OA directions of the left and right eyes. Some constant parameters in our model were set as follows:
,
, and
. The iteration range of kappa angles in our simulations was set as follows:
,
,
. With respect to the iteration termination error of
, the kappa angles from 10 calibrations are listed in
Table 1. “iter_num” represents the number of iterations for which the gaze-constraint error was less than the iteration termination error, and "fun_er" represents its corresponding gaze-constraint error.
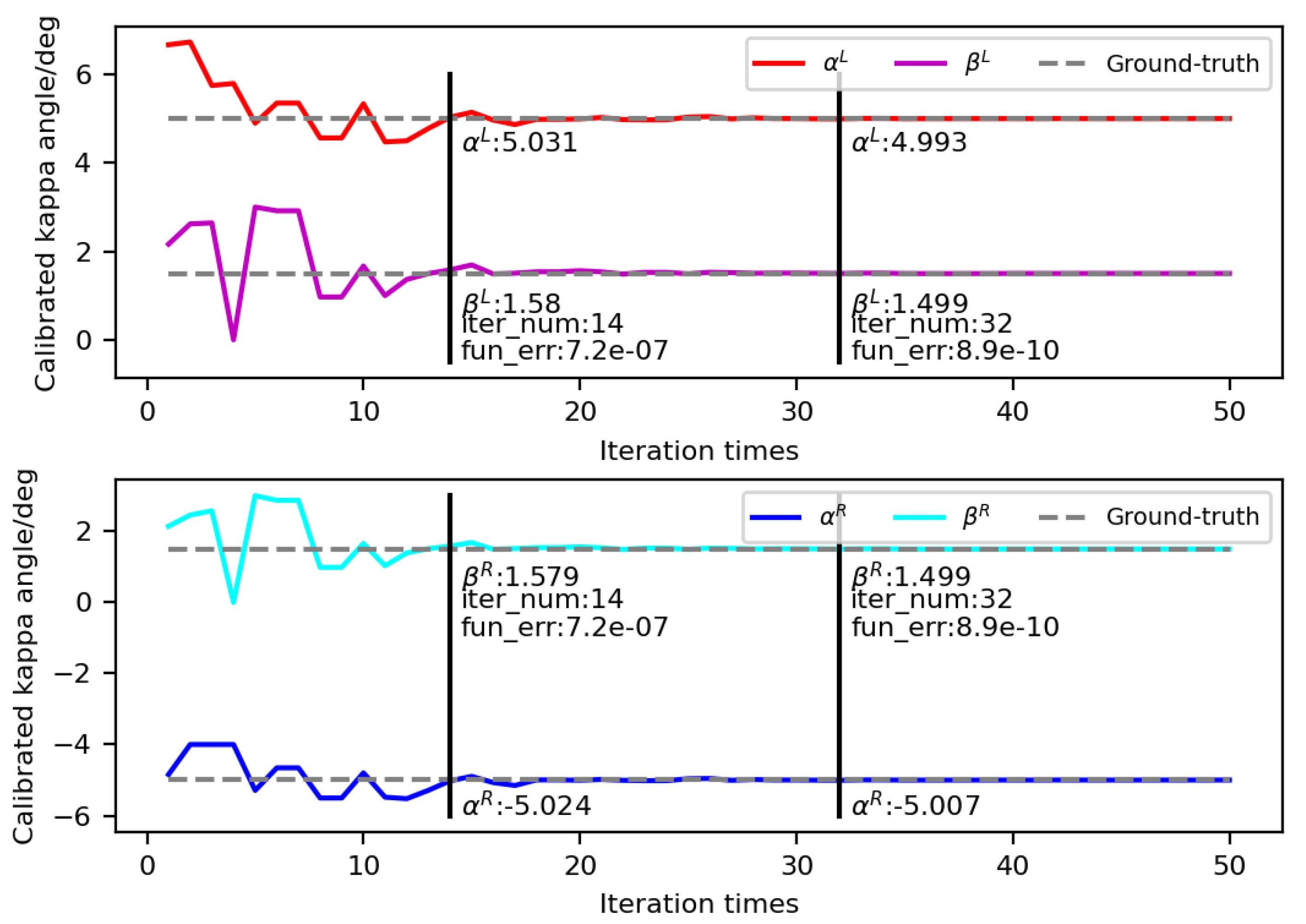
Figure 5 shows the iterative process of kappa angles calculated in the third round. The abscissa represents the number of iterations, and the ordinate represents the calibrated kappa angle. As the number of iterations increased, the kappa angles drifted simultaneously toward their true locations. The gaze-constraint error of the 14th iteration was less than
, and that of the 32th iteration was less than
. At this time, the values of
and
were 4.993
, 1.499
, −5.007
, and 1.499
, respectively, and their errors were less than 0.01
.
(1) The influence of the preset ground truth of the kappa angle: To exclude the influence of the preset ground truth of the kappa angle in the simulation, we analyzed six different sets of ground truth. The horizontal and vertical components of the kappa angle were: [5
,1.5
], [4
,1.5
], [6
,1.5
], [5
,1
], [5
,2
], and [4
,0.5
]. As mentioned in
Section 4.1, we first randomly generated nine groups of 3D corneal center coordinates for the left and right eyes within a distance of 350–650 mm, and then randomly generated nine gaze points on the screen. Thus, the VA direction was determined using the 3D corneal center and the gaze point, and the OA direction was calculated in reverse using the different sets of ground truths of the kappa angle. The 3D corneal centers and OA directions were then used for analyzing the influence of the ground truth of the kappa angle. Using the same constant parameters as above, the kappa angle was calibrated. The calibration results using different sets of ground truth are listed in
Table 2. It can be seen that no matter what the ground truth of kappa angle is, the error difference of the calibrated kappa angles was not significant, which was less than 0.01
. Therefore, in the subsequent study, we only analyzed the case where the horizontal and vertical components of the kappa angle were 5
and 1.5
, respectively.
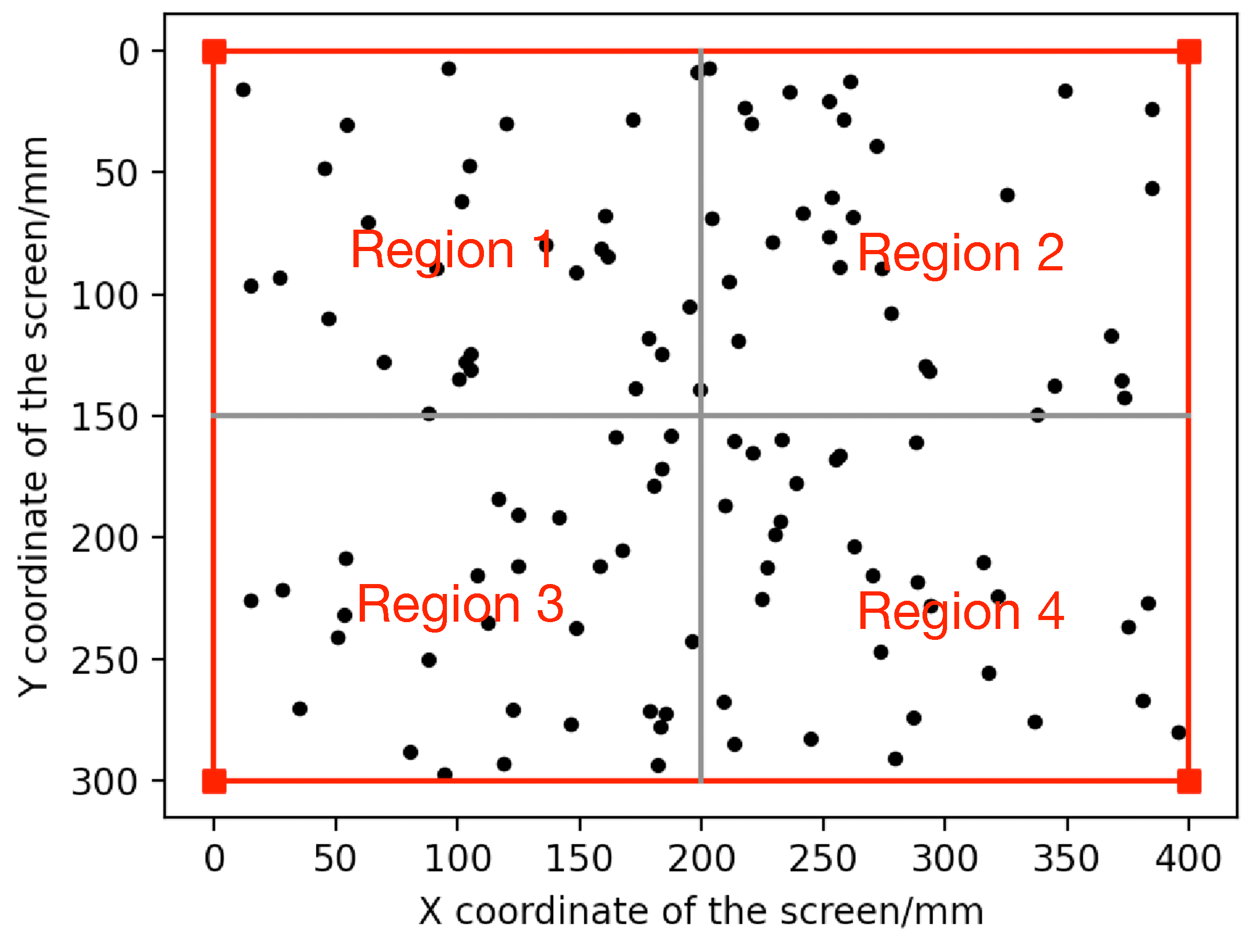
(2) Influence of gaze angle: We divided the screen area into four regions and randomly generated 30 gaze points on each region, as shown in
Figure 6. To ensure different gaze angles, we set the same left and right corneal centers corresponding to each gaze point. The 3D corneal centers of the left and right eyes were (−33.62420733, −62.55917489, 508.7146057) and (24.63352113, −76.53688391, 505.449529), respectively. Thereby, the corresponding OA directions of the left and right eyes were generated. Using the data located in the same region, we calibrated the kappa angle, as listed in
Table 3. It shows the effectiveness of the proposed method when using different regions of gaze points.
(3) Influence of the amount of data: We also tested the kappa angle calibrated with different amounts of data as input. When 1, 2, 4, 6, 9, 16, 25, 50, and 100 groups of data were taken as the inputs, the respective kappa angles of 10 calibrations were recorded. By comparing them with the ground truth, we calculated the root mean square error (RMSE) of 10 calibrations with different amounts of data, as shown in
Table 4. When the data used were less than four groups, the kappa angle could not be exactly iterated due to underdetermined equations. When no less than four groups were used, the kappa angle was accurately calibrated with an error of less than 0.01
. However, when more than nine groups of data were used, the accuracy improvement was little compared with that of nine groups of data.
In conclusion, the proposed kappa-angle-calibration method can obtain the accurate kappa angle using the accurate corneal centers and OA directions. To obtain the accurate kappa angle quickly, the the amount of data should be considered. When the data reach a certain amount, the accuracy improvement of kappa-angle calibration is little, and the increase in the the amount of data would reduce the operation speed of the algorithm. Moreover, with the increase in the amount of data, the error of the data itself would also be superimposed. Therefore, it is necessary to carry out data filtering according to the actual situation and select the appropriate the amount of data to calibrate the kappa angle.
4.1.2. Error Analysis
Due to system errors and eye-feature-detection errors, gaze-related parameters such as 3D corneal center, 3D pupil center, and iris center often have estimation errors in a real scene. These errors will be transmitted to the OA and VA of the eyeball subsequently. For example, Lu et al. [
23] stated that a 0.5 mm error of 3D pupil estimation in
x- or
y-axis induced a 3
error in gaze angle. Therefore, we analyzed the influences of 3D-corneal-center error and OA error on the kappa-angle calibration, as they are the input of kappa-angle calibration.
Here, in addition to simulating the remote gaze-tracking system described above, we also simulated a head-mounted system for comparison. Four screen corner points were set at (−75, 70, −400), (225, 70, −400), (225, −140, −400), and (−75, −140, −400); and the coordinates of the left corneal centers were generated within certain ranges (x: from 5 mm to 10 mm, y: from 20 mm to 30 mm, z: from 25 mm to 35 mm). Thus, the right corneal centers and OA directions were generated in the same way as the remote system. In combination with the influence of the amount of data, we studied the kappa-angle calibration and the guarantee of a single variable. The same nine groups of data in each system were used for the following error analysis.
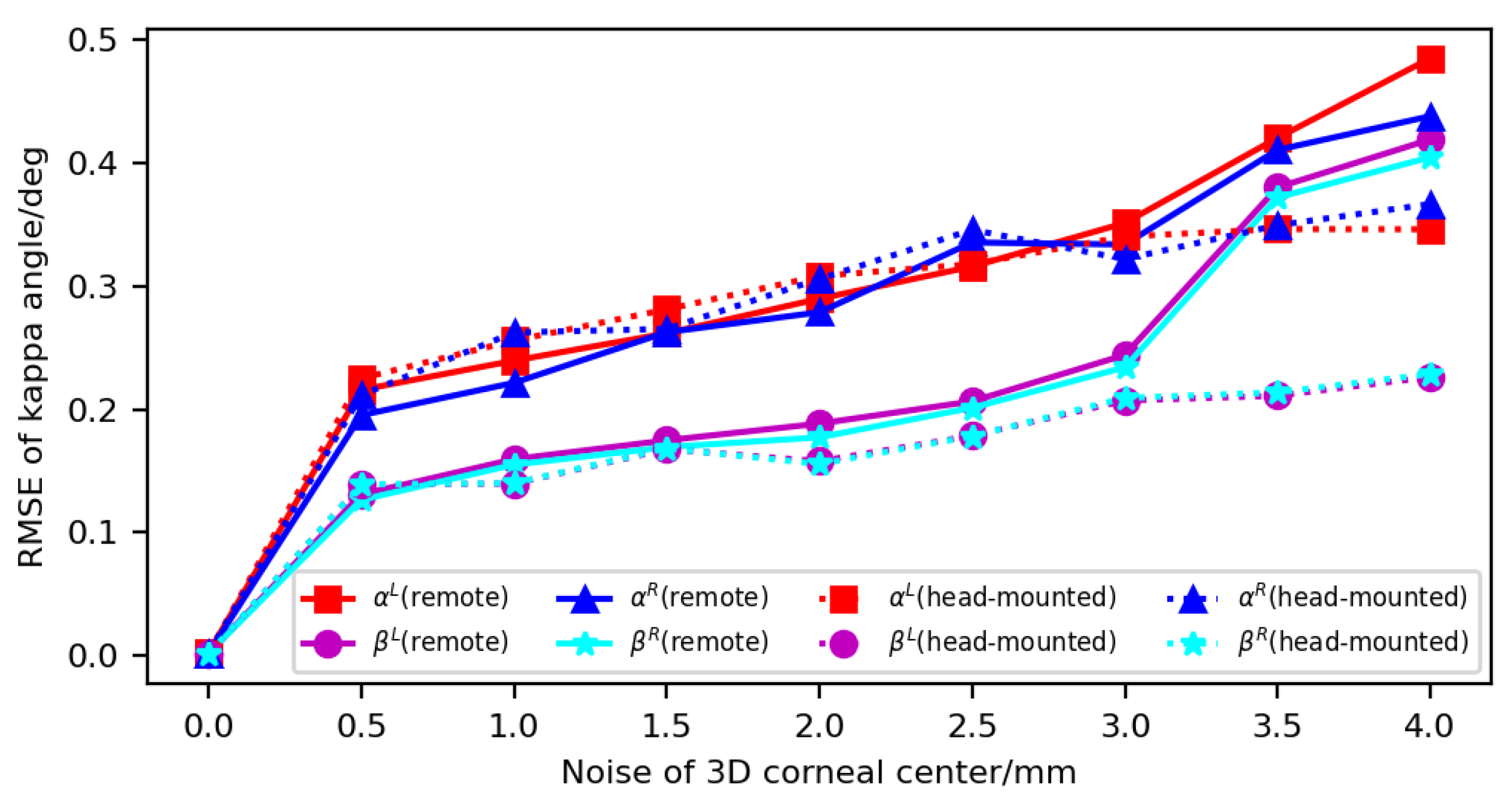
(1) Analysis of the 3D-corneal-center error: The independent, zero-mean white Gaussian noise was added to the coordinates of the 3D corneal center to simulate its error. When the standard deviation (SD) of the Gaussian noise increased from 0 to 4 mm, the same noise was simultaneously added to the coordinates of the 3D corneal centers of the left and right eyes. For each SD of noise of the 3D corneal center, 100 calibration results of kappa angle were recorded, and the RMSE was calculated.
Figure 7 shows the influence of 3D-corneal-center error on kappa-angle calibration. When the SD of the noise changed from 0 to 4 mm, the error of kappa angle increased. For the remote gaze-tracking system, when the SD of the noise was 0.5 mm, the error of the horizontal angle was about 0.2
, and the error of the vertical angle was about 0.13
. When the SD of the noise was 4 mm, the errors of the horizontal and vertical angles were larger than 0.4
. For the head-mounted system, when the SD of the noise was 0.5 mm, the errors were similar to those of the remote system. However, when the SD of the noise was 4mm, the errors were less than those of the remote system. They were about 0.35
and 0.23
in the horizontal and vertical planes, respectively.
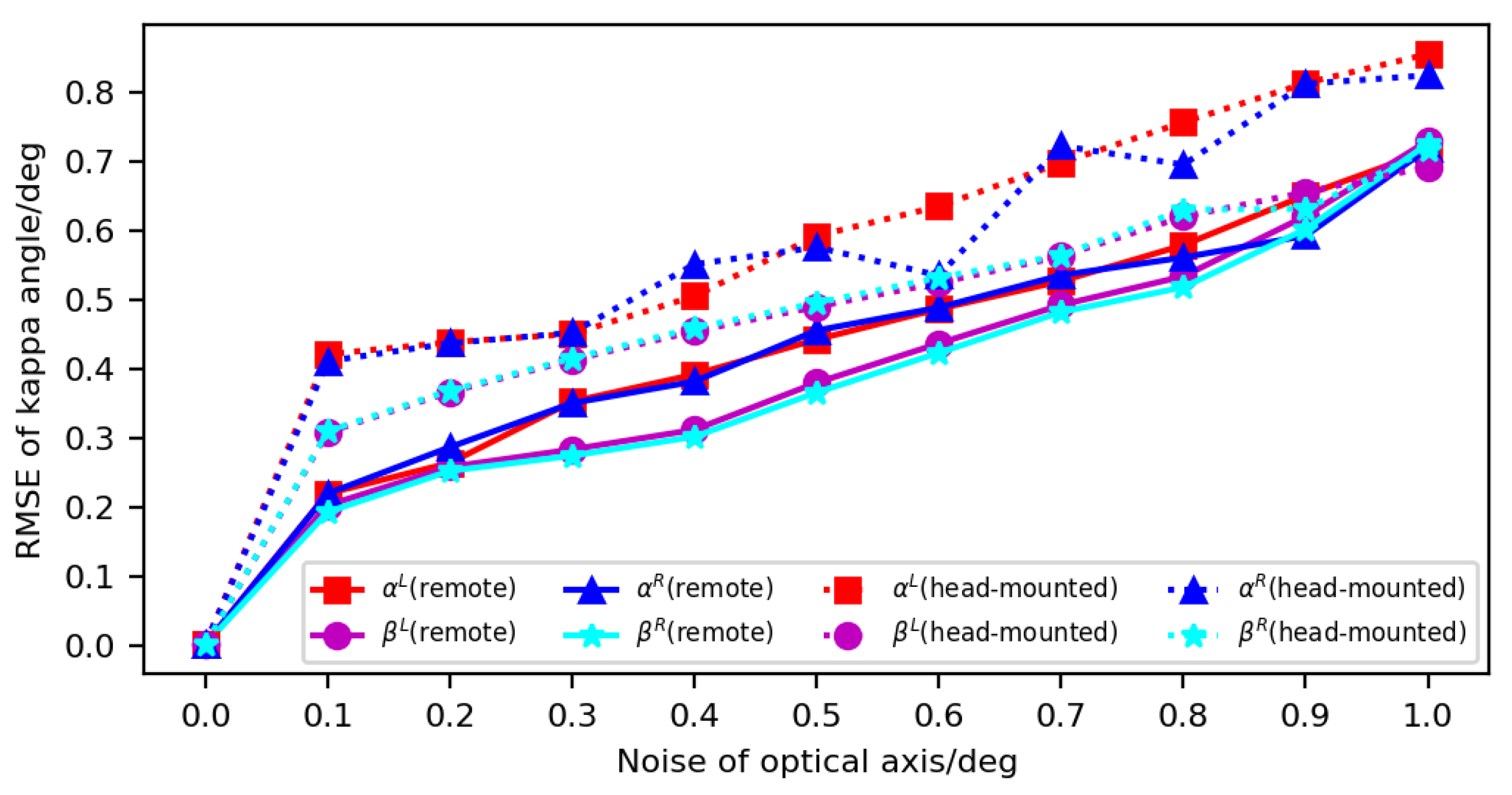
(2) Analysis of OA error: The OA direction in the camera coordinate system has a unique relation to its horizontal and vertical angles in the eyeball coordinate system. To simulate the OA error, we simultaneously added independent, zero-mean white Gaussian noise with a SD of 0–1
to the horizontal and vertical angles of the OA directions of the left and right eyes. The SD of the Gaussian noise varied from 0 to 1
in steps of 0.1
, and 100 calibration results of kappa angle under the noise were recorded for each value of SD, and the RMSE was calculated.
Figure 8 shows the influence of OA error on kappa-angle calibration. The errors in the head-mounted system were generally larger than those in the remote system. For the remote gaze-tracking system, when the SD of the OA noise was 0.1
, the errors of the horizontal and vertical angles were about 0.2
. When the SD of the OA noise was 1
, the errors of the horizontal and vertical angles reached 0.7
. For the head-mounted system, when the SD of the OA noise was 0.1
, the error of the horizontal angle was about 0.41
, and the error of the vertical angle was about 0.3
. When the SD of the OA noise was 1
, the errors of the horizontal and vertical angles were about 0.85
and 0.7
in the horizontal and vertical directions, respectively.
(3) Discussion: It can be seen from the above analysis that whether in the remote system or the head-mounted system, the OA error was more influential on the kappa-angle calibration than the 3D-corneal-center error. The influence of 3D-corneal-center error on kappa-angle calibration was comparable when used in these two systems. However, when the calibration method was used in the head-mounted system, the influence of OA error was larger than that in the remote system. The fact that both the 3D-corneal-center error and the OA error have a significant impact on the kappa-angle calibration is a universal problem of all kappa-angle-calibration methods [
24]. The reasons are as follows: On one hand, as the origin of the eyeball coordinate system, the 3D corneal center is the key to the transformation between the camera coordinate system and the eyeball coordinate system. In addition, the 3D corneal center is the only intersecting point for the OA and the VA, so it plays a vital role in the VA transformation from the OA. On the other hand, the OA direction is the reference direction of VA transformation. If there is an error in the OA direction, the transformed VA direction also has an error. It will appear as a large deviation in the POR on the screen with a large distance between the user and the screen. Therefore, the key to accurately iterating the kappa angle is to ensure the accuracy of the input data.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}