1. Introduction
In structural health monitoring (SHM), strain sensors are widely used to inspect local stresses in large structures. However, conventional strain gauges suffer from wire redundancy. Although active wireless strain sensors composed of strain gauges and wireless nodes solve the problem of wiring, these wireless sensors need to replace batteries periodically. As an alternative solution, passive wireless strain sensors, which are resonator-based, battery-free, and non-tether electronic devices, can perform non-contact strain measurements. Researchers have investigated several types of passive wireless sensors, which can be classified as near-field and far-field passive wireless sensors based on their wireless power transfer method [
1]. Far-field passive wireless sensors use dipole or patch antennas to receive and reflect electromagnetic waves in the ultrahigh frequency band; the sensing distance of these sensors is usually greater than 0.5 m [
2,
3,
4,
5,
6,
7,
8]. However, their operating frequency overlaps with that of wireless communications, such as TVs, FM radios, and mobile phones, so the signal of sensors could be affected by these interfering sources, which brings difficulties to signal processing [
9]. In contrast, near-field passive wireless sensors operate in the middle or high-frequency band, using two coils to transmit energy at a short distance. The most common near-field passive wireless sensor is based on the inductor-capacitor (LC) circuit, including a capacitive sensor and an inductive coil [
10,
11,
12]. Unfortunately, their wireless sensing distance is relatively low, due to the low quality factor and the low transmitter gain. Therefore, this problem limits the application of near-field passive wireless sensors.
In this paper, we present a novel near-field passive wireless strain sensor based on a bulk acoustic wave (BAW) device. Its sensing element is a quartz resonator sandwiched in the sensor housing. The high quality factor of the resonator improves the efficiency of the wireless power transmission and the signal-to-noise ratio. Current BAW sensors, such as quartz crystal microbalances (QCMs), have been widely used in chemical and biological analytics [
13], temperature and humidity monitoring [
14], and pressure detection [
15]. Previous efforts have confirmed that a quartz wafer can be simplified as a mass-spring-damper model [
16,
17]. For biochemical sensors, when liquid or gas flows through the wafer, the mass of the coating on the wafer surface will increase in response to the analyte in the flow, so the “added mass” will reduce its resonant frequency [
18,
19]. For pressure sensors, when a fluid passes through the wafer, the wafer is subjected to pressure from the fluid flow, so the equivalent “added stiffness” will increase its resonant frequency [
15]. To the best of our knowledge, no bulk acoustic wave force/strain sensor has been proposed in the literature, but previous efforts have investigated the contact mechanism between a quartz wafer and a contact element [
20,
21]. The principle is similar to BAW pressure sensors. The contact forces can be considered as an “added stiffness” of the resonator, so the resonant frequency increases with normal force.
In this paper, we present a BAW passive wireless strain sensor. In
Section 2, we develop an analytical model to investigate the principle of a BAW strain sensor. Then, we briefly describe the analytical model of a BAW passive wireless sensing sensor. In
Section 3, we characterize the relationship between the normal force and the resonance shift of the quartz. A numerical model illustrates the availability of the sensor design. Finally, we use experimental demonstrations to study the performance of a prototype sensor, such as sensitivity and sensing distance.
2. Materials and Methods
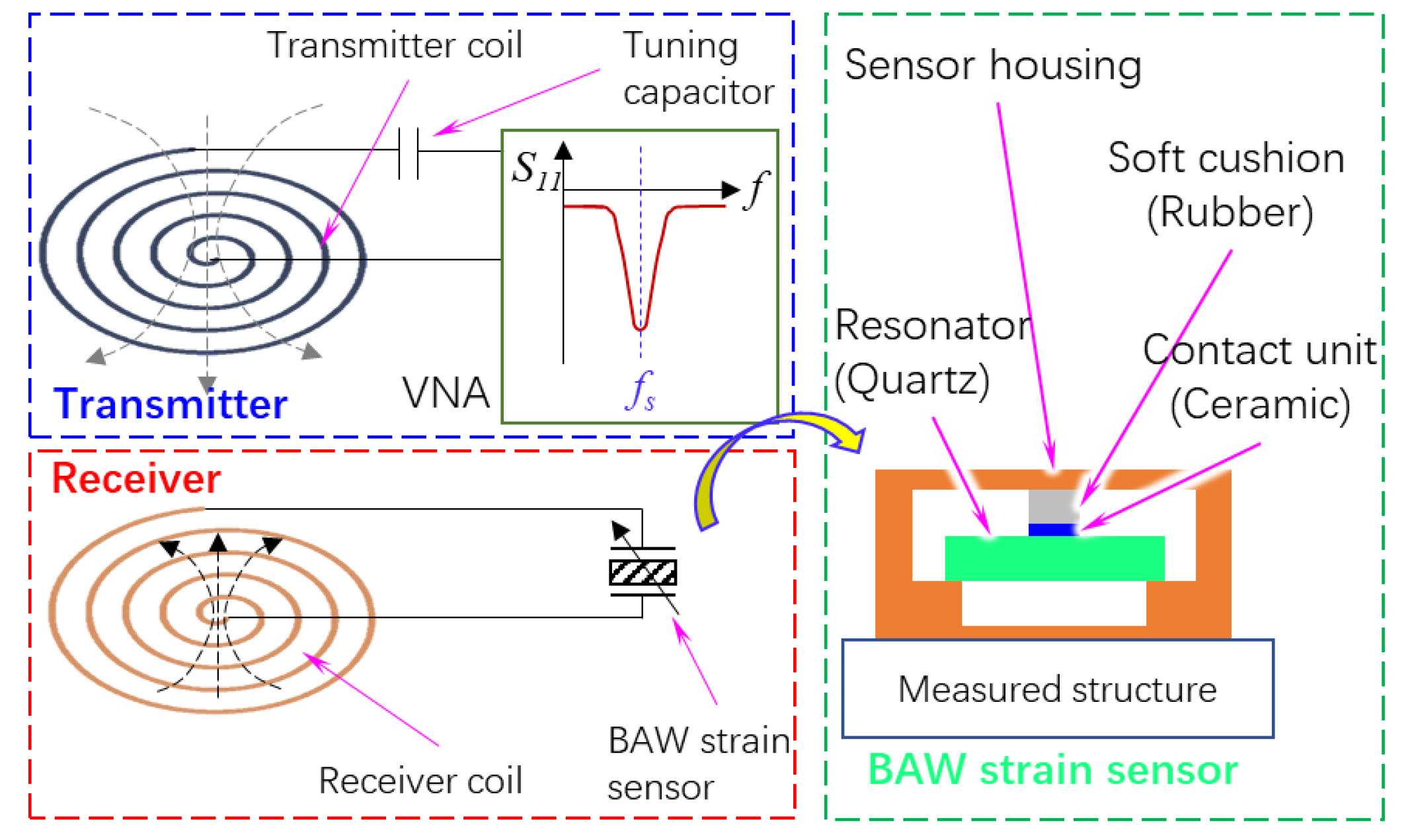
In this paper, a BAW strain sensor makes use of four rules. The schematic is shown in
Figure 1.
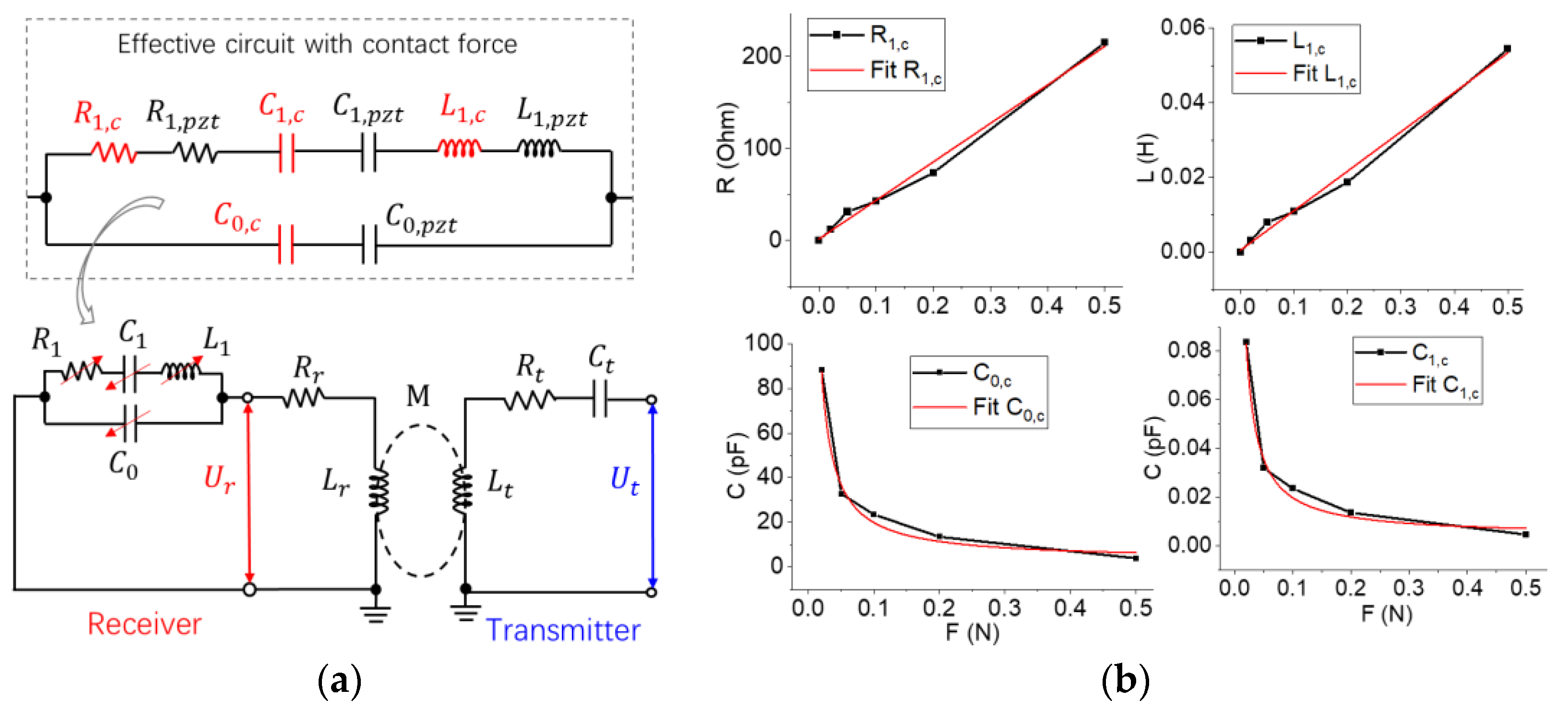
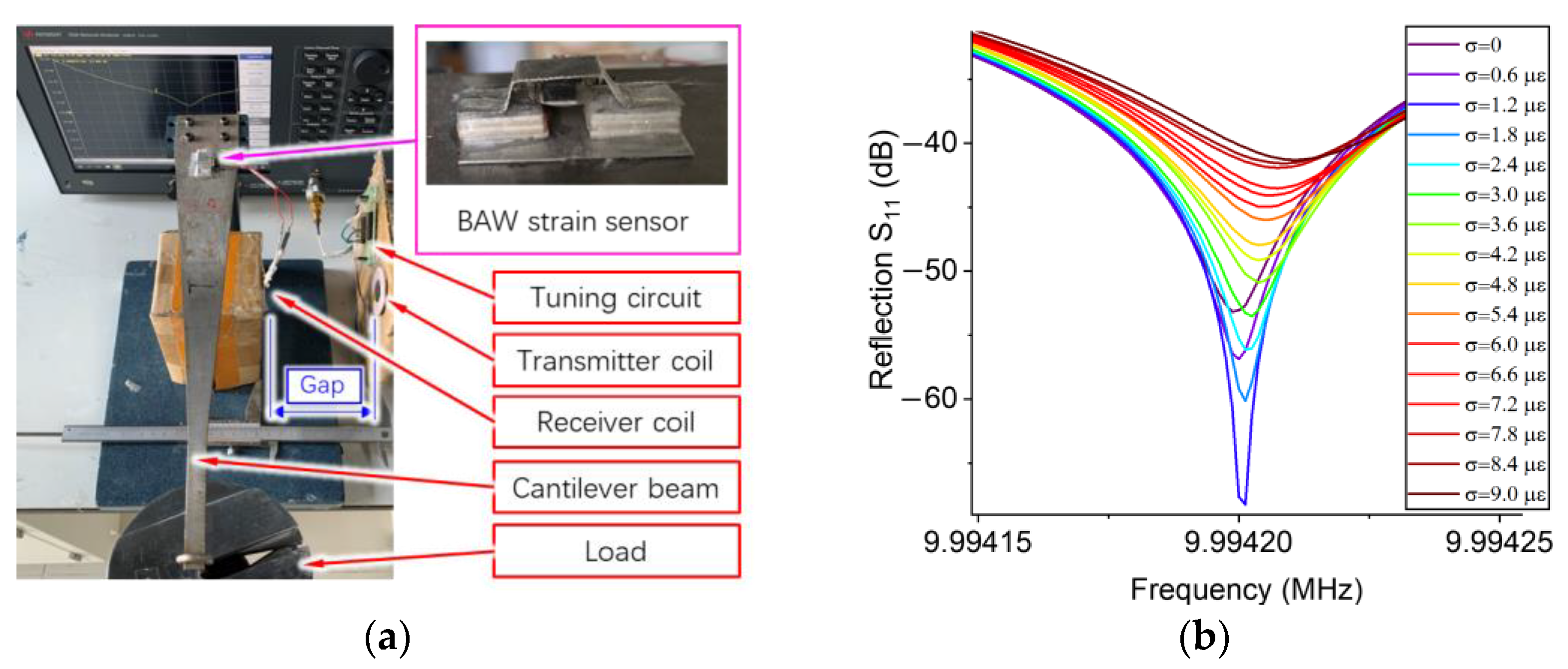
First, a BAW passive wireless strain sensor consists of two subsystems: a transmitter and a receiver. The receiver has two components: an inductive coil and a BAW strain sensor. As a force-sensitive element, a quartz wafer is embedded in the sensor housing. When the excitation frequency is equal to the resonant frequency of the receiver, the impedance of the receiver reaches a global minimum value, whereas that of the transmitter reaches a local maximum value. Therefore, we can detect the peak signal of the transmitter to analyze the deformation of the substrate of the BAW sensor.
Second, the BAW strain sensor has a sandwich-like structure, which converts the deformation of the measured structure into the resonance shift of a quartz resonator. A quartz wafer with a thickness shear vibration mode generates bulk transverse waves that travel normally to the plate surface, so the wafer surface moves parallel to the surface. If an object contacts the surface of the wafer, the wafer is subjected to compression and friction from the object. If we consider the quartz wafer as a mass-spring-damper resonator, these external forces can be considered as an “added stiffness”. Previous literature has reported that the resonance shift is proportional to the contact radius between the quartz plate and the contact unit [
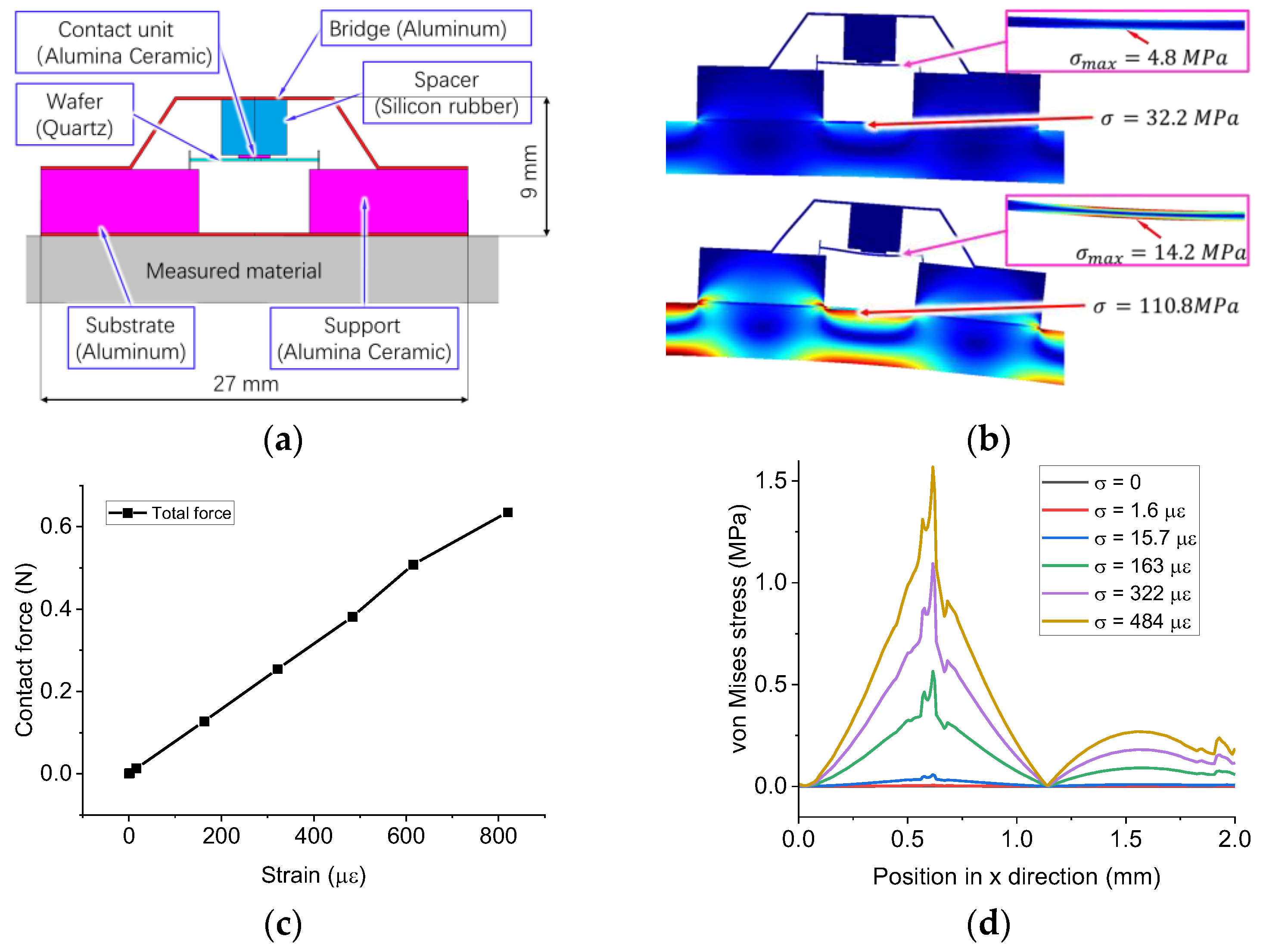
20]. Based on the contact mechanism of piezoelectric materials, we designed a sensor housing, which converts the stress of the substrate into the contact forces applied to the upper surface of the wafer. The bottom of the sensor housing is in contact with two boundaries of the wafer’s lower surface, so the air gap allows the wafer to vibrate.
Third, we chose a thin ceramic sheet as the contact unit to improve the sensitivity of the sensor. The objective of the sensor design was to continuously change the contact area between the contact unit and the quartz wafer, so the contact unit should have a high stiffness. Otherwise, a soft contact unit, such as silicon rubber, would fully adhere to the wafer even if the contact force is very low, so the resonance will not change with the contact force. Furthermore, we chose a flat contact surface, instead of a spherical surface, to enhance the sensitivity of the sensor. The experimental studies in previous work have shown that the resonance shift was below 200 Hz when a spherical ball made of ceramic contacts a quartz wafer with a resonance of 10–12 MHz [
21]. The low sensitivity is due to a nonlinear relationship between the contact radius and normal force. If the contact surface is flat, the contact area will linearly increase with the normal force due to the non-uniform contact pressure.
Fourth, the contact unit was connected with the sensor housing via a deformable force buffering structure, which protects the vulnerable quartz wafer from the damage of overlarge contact pressure. In this paper, a soft cushion made of rubber was used to demonstrate the feasibility of the sensor, but the buffering structure can be a spring or a thin-walled deformable structure.
The primary design parameter of a BAW passive wireless sensor is the resonant frequency of the quartz wafer. A thinner quartz wafer has a higher resonant frequency and a lower resistance. To decrease the resistance of the receiver, we prefer to choose a wafer with a higher resonance frequency. However, the strength of a quartz wafer decreases with its thickness so that a thin wafer is unable to withstand the applied normal force. Due to the restricted manufacturing conditions, we composed the parts of the sensor manually, so the highest resonant frequency of the sensor we could fabricate was 10 MHz; the thickness of the quartz wafer was approximately 0.16 mm, and the equivalent resistance was near 37 Ohms. Secondary design parameters include the impedance of the inductive coil and the gain of the transmitter. This paper does not consider the coil optimization, but we use an RLC circuit to compensate for the impedance of the transmitter.
In this section, we establish an analytical model to investigate the properties of a quartz resonator in contact with an object. The governing equations of a quartz wafer are represented by the following equations [
22]:
where
T is stress,
D is electrical displacement,
E is strain,
ϕ is electrical potential;
C,
η,
e, and
ε are the coefficient of stiffness, damping, piezoelectric, and dielectric, respectively. The resonant frequency of a piezoelectric plate with infinite length can be written as [
20]:
where
t is thickness,
ρ is density, and
is a coefficient in the stiffness matrix. The equation suggests that the resonance of a thickness shear mode piezoelectric plate mainly depends on its shear stiffness, so we ignore the normal contact stiffness
kn in this paper.
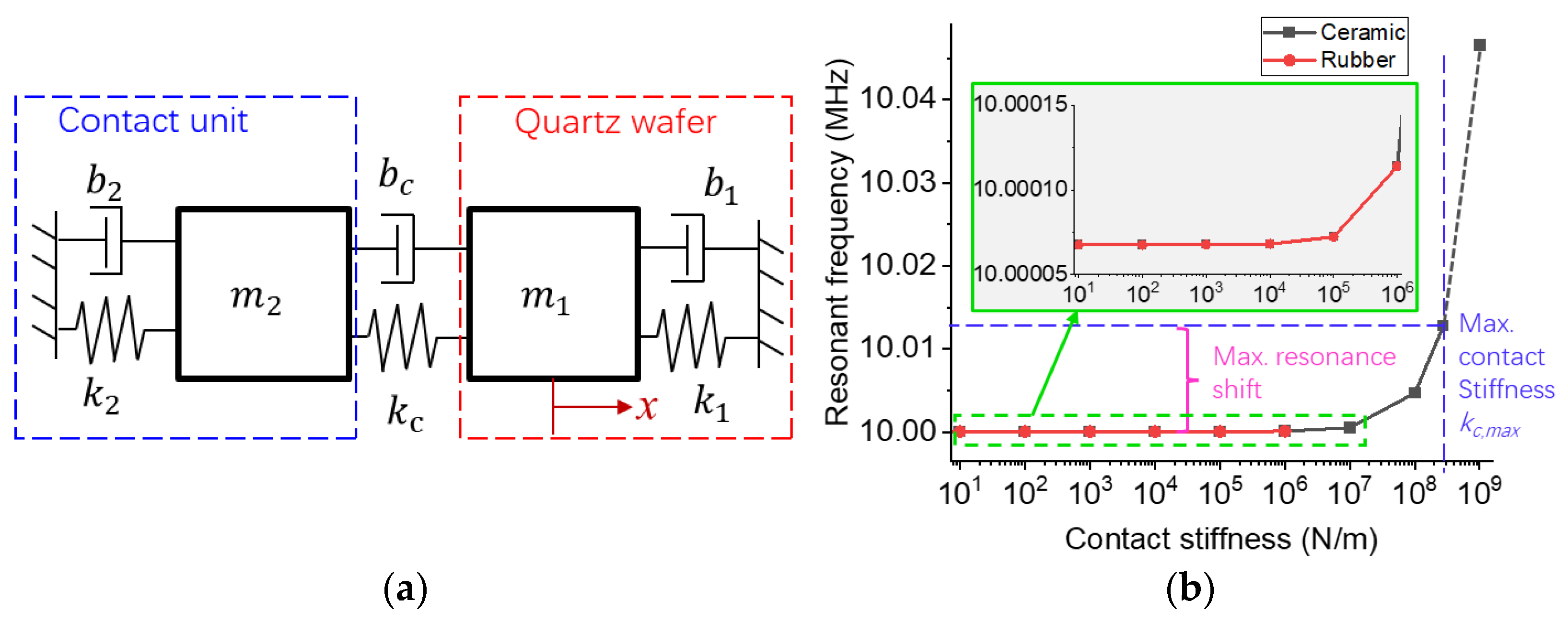
We establish a dual mass-spring-damper system to analyze the influence of the contact unit on the wafer (see
Figure 2a).
Assuming each object is a square plate, the effective mass can be written as [
15]:
where
L and
h are the length and height of the object, respectively; subscripts 1 and 2 represent the quartz resonator and the contact unit, respectively. The resonant frequency of a single mass-spring-damper model can be represented as:
where
k is the effective stiffness. According to Equations (3)–(5), we can find the effective stiffness of a quartz oscillator as follows:
where
G1 is the coefficient
c66 of the quartz wafer;
G2 is the shear modulus of the contact unit.
The two objects are coupled by a spring
kc and a damper
bc. The equations of motion of the system can be written as:
where the first term on the right side of Equation (8) depends on the contact forces, and the second term depends on the energy loss of the wafer, including acoustic wave emissions and heat loss. To study the influence of contact forces on the resonance shift of the quartz, we ignore the damping coefficients, so Equation (7) can be written as follows:
The eigenfunction and eigenvalues of Equations (9) and (10) are determined by the following equations:
If the contact surface is flat and parallel to the quartz wafer, the contact stiffness in the tangential direction can be represented as the following equations [
21]:
where
G* is the effective shear modulus. Due to the non-uniform pressure distribution on the contact surface, the contact stiffness will increase with the contact forces, so the tangential contact stiffness
kt is the maximum value of contact stiffness. For the real sensor, the parallelism error between the wafer and the ceramic sheet will affect the sensitivity of the sensor as well.
In Case A, we substitute each coefficient in the BAW sensor into Equation (12), see
Table 1. The relationship between
kc and
λ1 is shown in
Figure 2b. According to Equation (13), the maximum contact stiffness
kc,max is 5.52 × 10
8 N/m. The expression of eigenvalues is highly non-linear, so the resonant frequency increases nonlinearly with the contact stiffness. If the contact stiffness could reach its maximum value, the resonance shift is 13.2 kHz, and the eigenvalue is
u1 = [−1.08, 0.0028]
T. The result suggests that the contact has little influence on the thickness-shear vibration mode of the oscillator.
In Case B, the mass and stiffness of a soft contact unit have little influence on the resonance when the contact stiffness is the same. However, the maximum contact stiffness is limited by the stiffness and dimensions of the contact unit, so the resonance will be constant after the soft material fully adheres to the wafer.
4. Discussion
A comparison between this work and previous relevant work is shown in
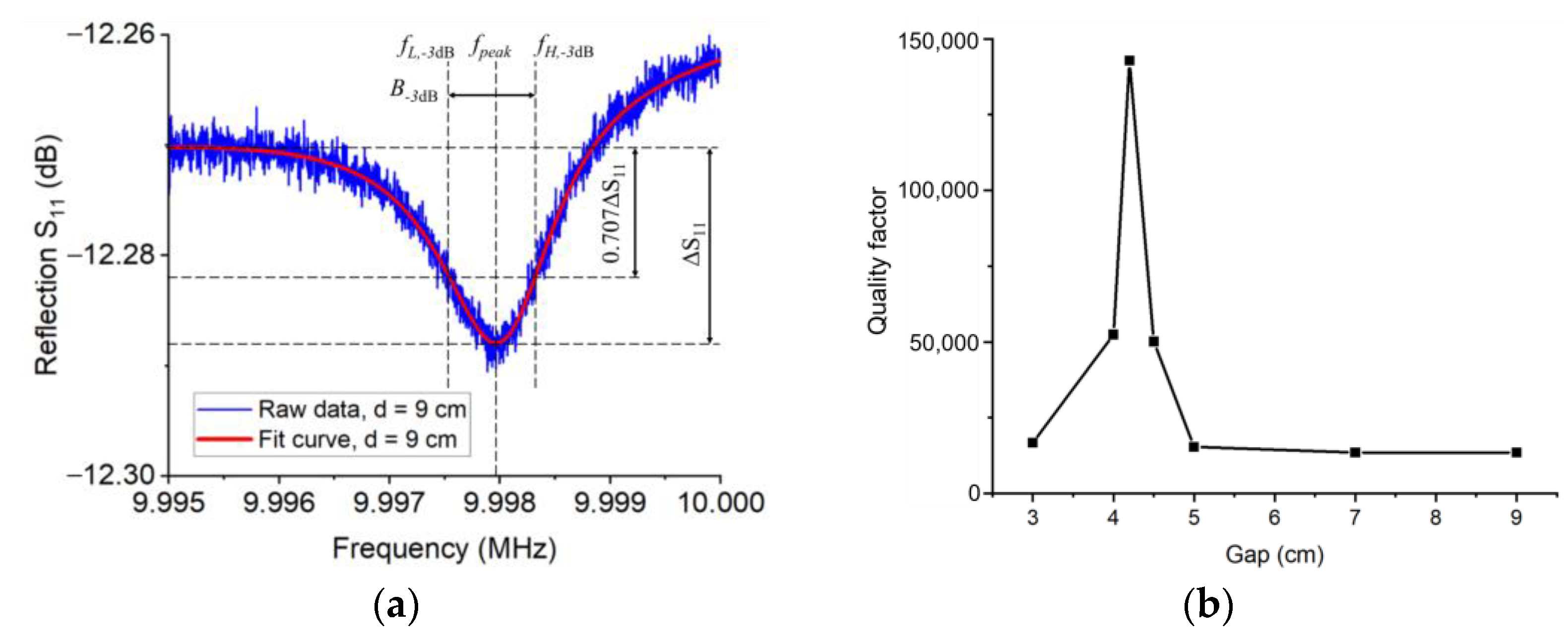
Table 4. The wireless sensing distance depends on the size of the coil, so we define a normalized distance to evaluate the relative wireless sensing distance of near-field passive wireless sensors, which is the spacing between coils divided by the coil diameter. Although our sensor has a modest sensitivity, our sensor has two advantages.
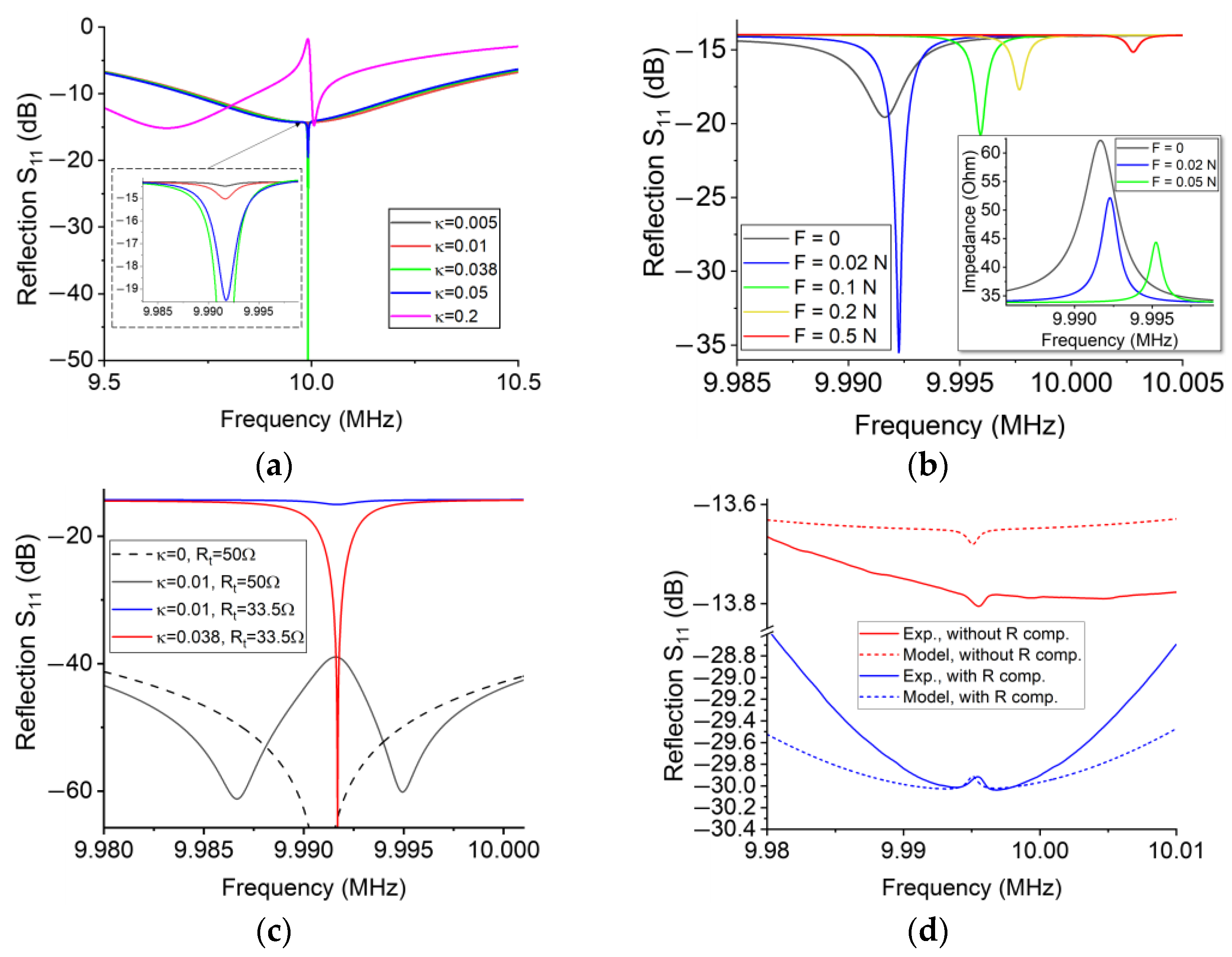
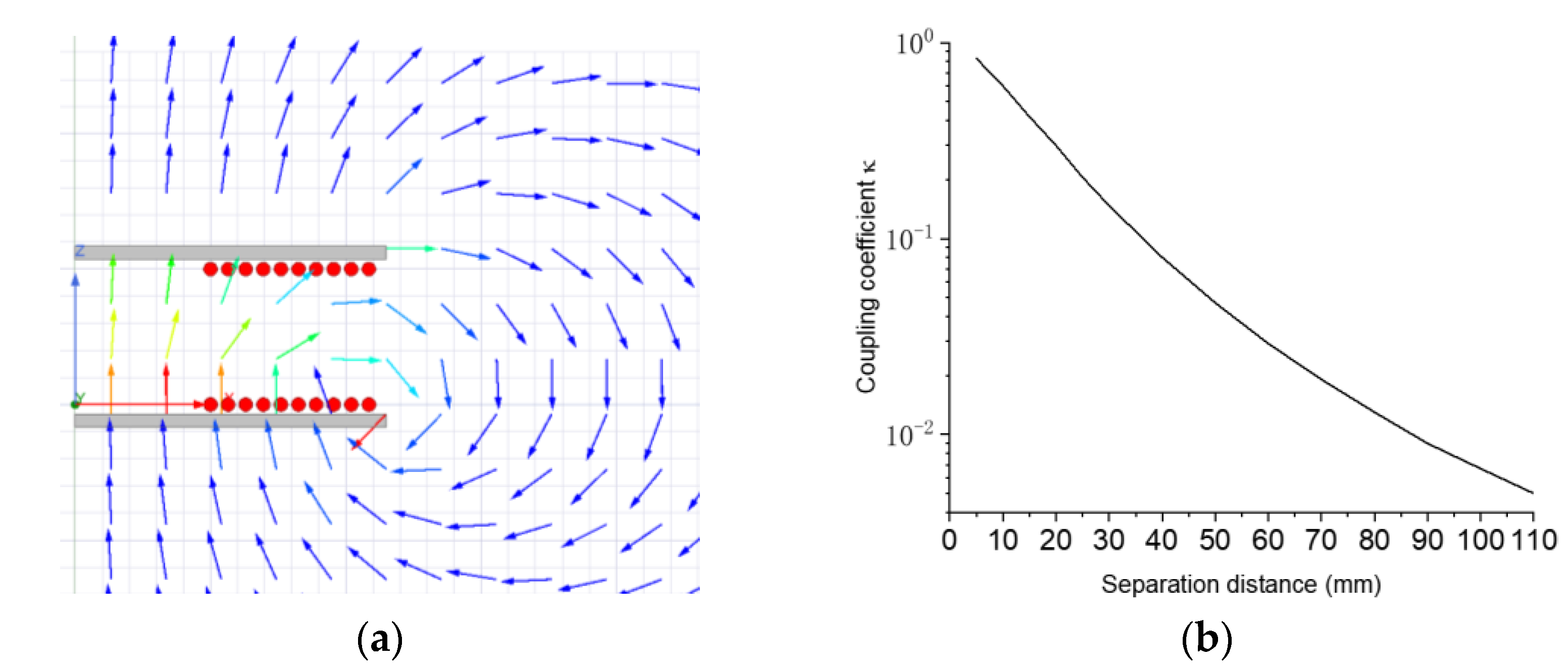
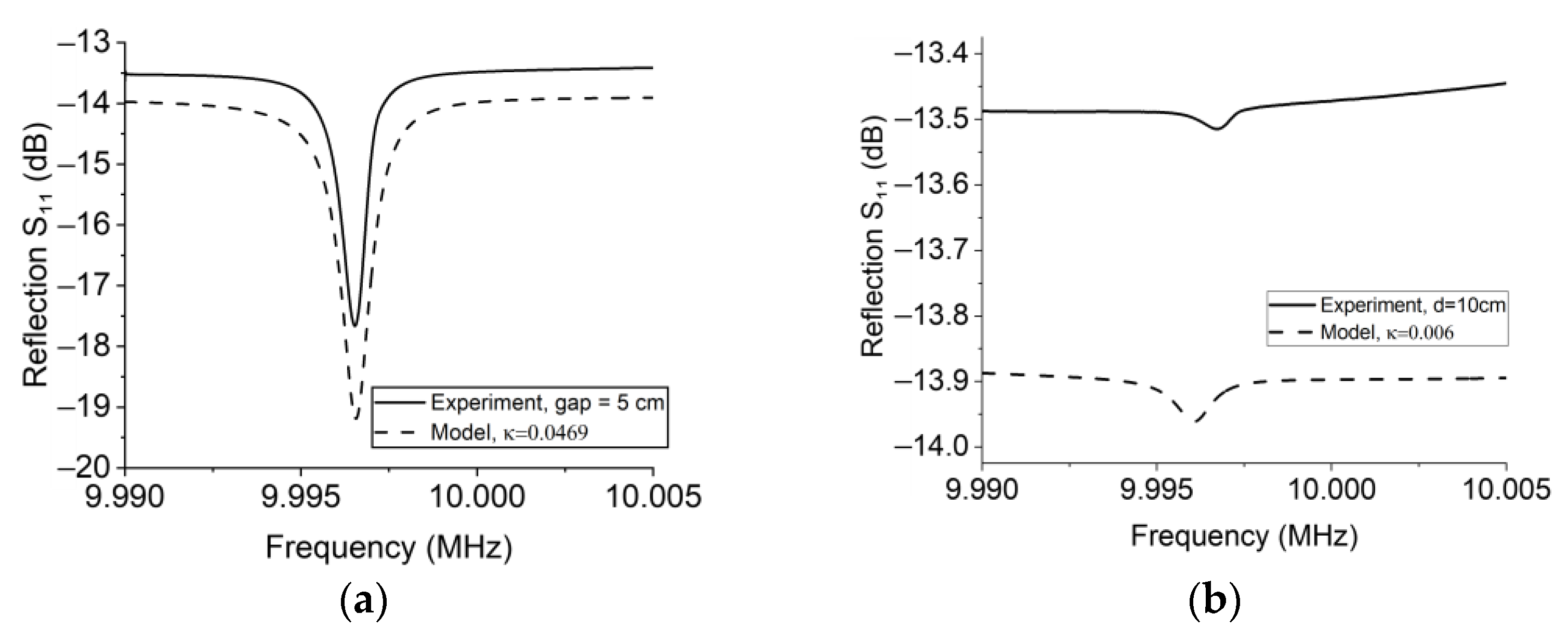
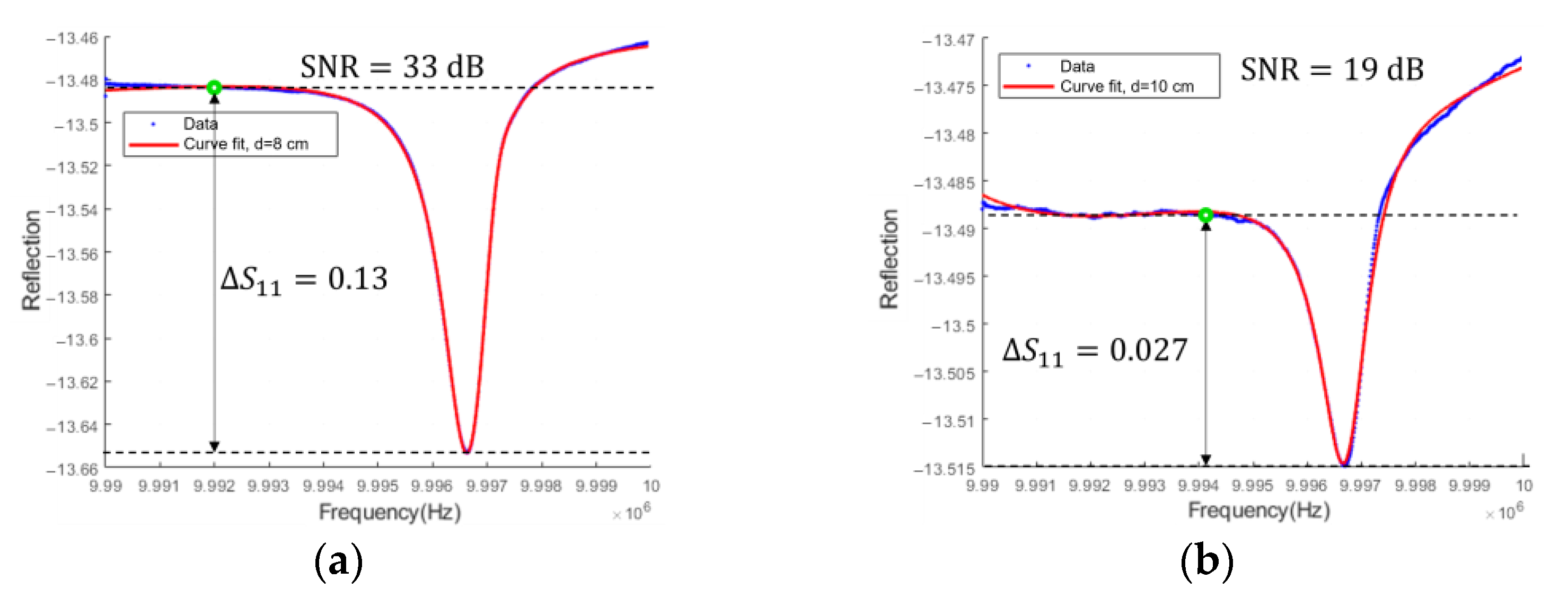
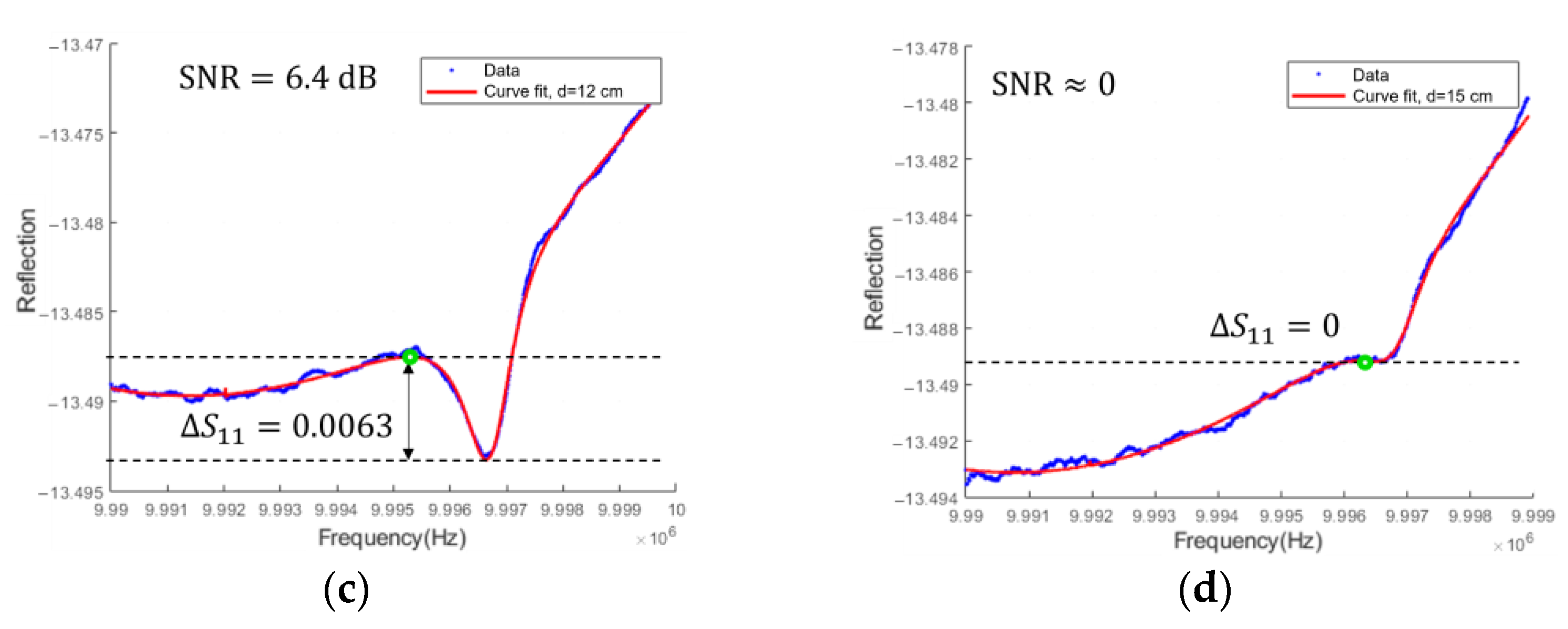
First, the sensor can detect the resonance of receiver when the coupling coefficient is extremely low. Due to the high quality factor of the quartz, the current in the transmitter has a recognizable change in a narrow frequency band when κ is low. In addition, the tuning capacitor in the transmitter increases the output power of the transmitter coil.
Second, the resonant frequency of the sensor is nearly independent of the wireless sensing distance if the coupling coefficient κ is low enough. One reason is that the difference in quality factors between the transmitter and the receiver is relatively higher than conventional inductor-capacitor (LC) based passive wireless sensors. Another reason is that the long sensing distance allows the sensor to measure the peak signal when κ is relatively low. In this case, the separation of eigenvalues caused by the variation of the coupling coefficient can be neglected. This property suggests that the sensor has a high stability when there is a misalignment or relative motion between coils.
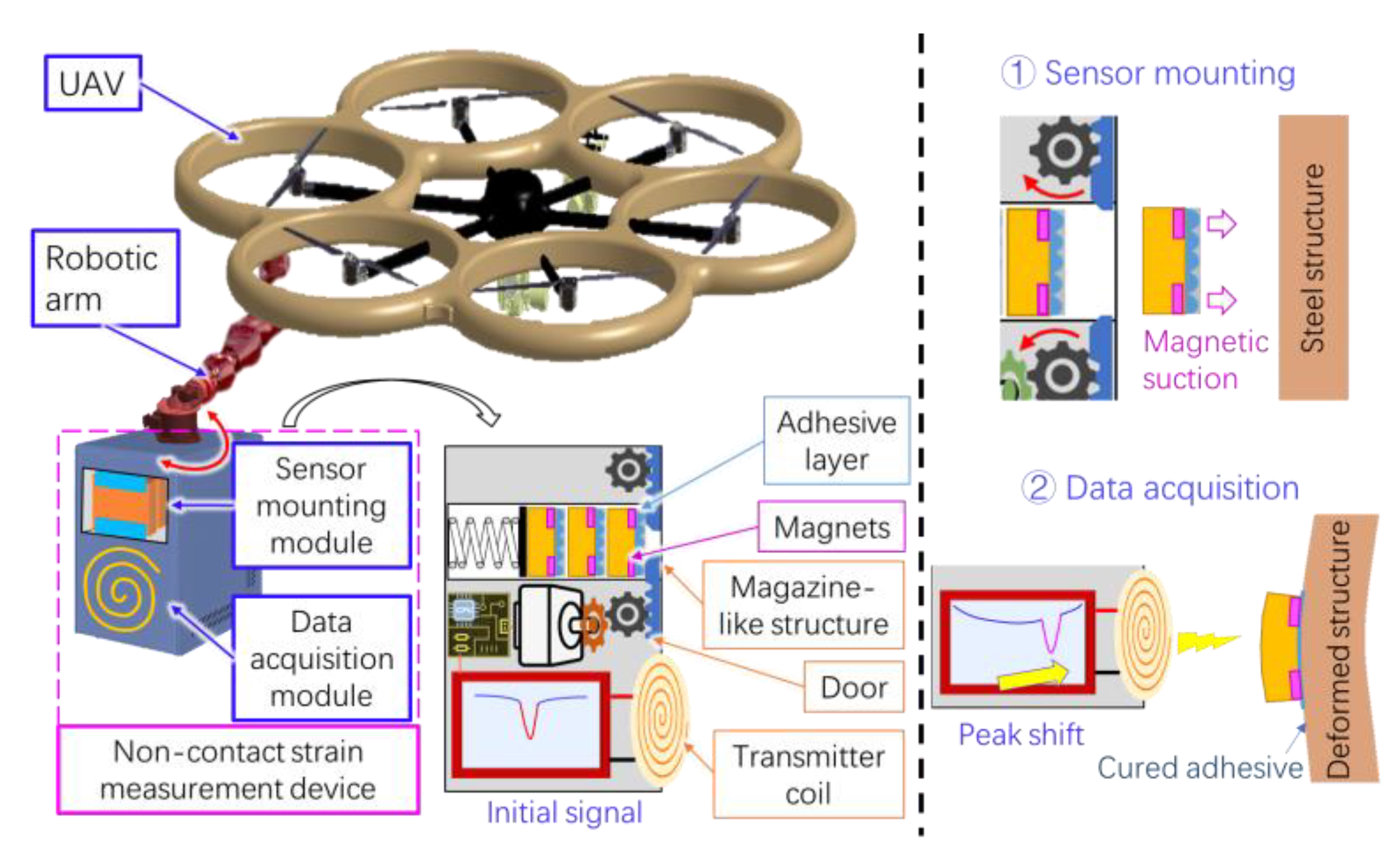
The BAW passive wireless sensor may be compatible with a UAV-based monitoring platform for strain measurement of large buildings. The high stability of the sensor can reduce the measurement error due to the non-stationary motion or position error of the UAV. Thanks to the long wireless sensing distance, the UAV can collect the sensor signal at a safe distance. The operating frequency of the sensor is much lower than the communication bands of the UAV, so the signal interference to the sensor can be minimized. To mount the sensors, we propose a non-contact sensor-mounting method based on magnetic suction and pressure-curing adhesives. We will embed permanent magnets into the left and right supports of a sensor and spray pressure-cured adhesives on its substrate. The UAV will carry a sensor mounting module and approach the steel surface of the measured structure. The module includes a magazine-like structure that releases the sensor when the door is opened. The sensor will be attached to the measured surface by magnetic suction. The adhesive will cure under the pressure. This concept is shown in
Figure 12.
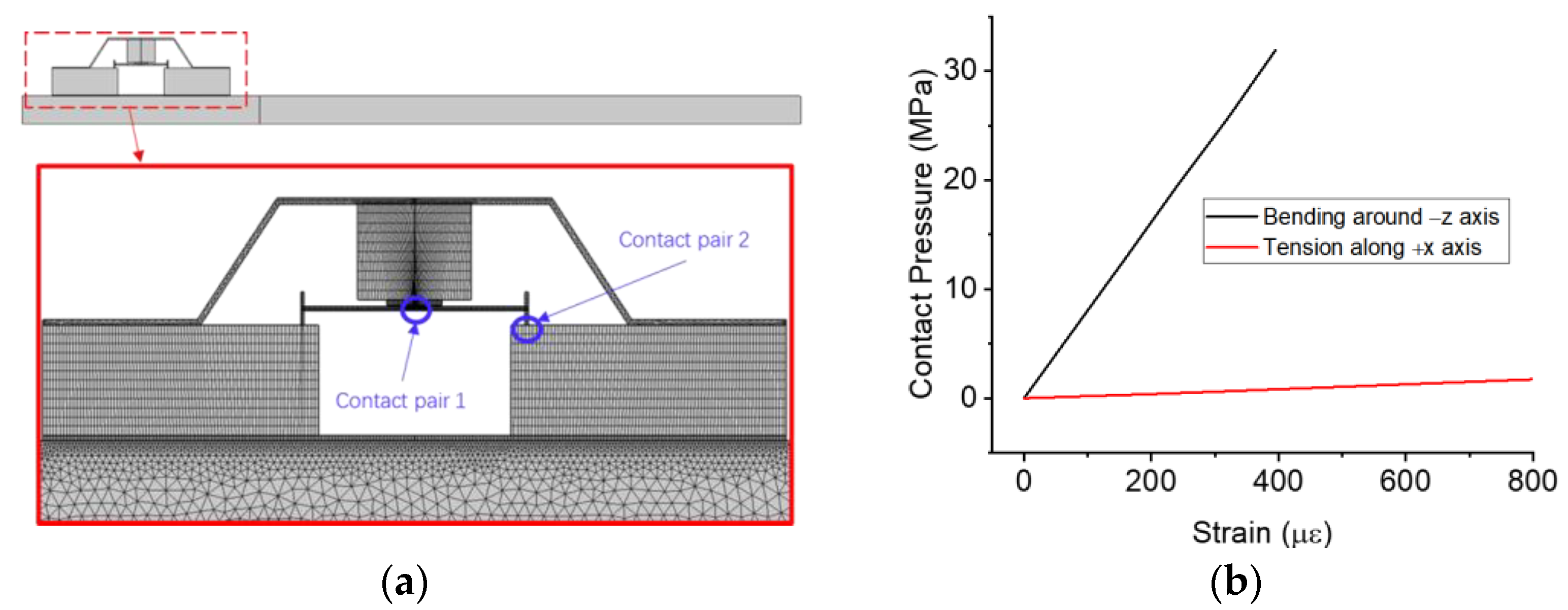
Finally, we point out the problems of the prototype, which should be considered in future work. The first issue is the repeatability of the sensor. The manufacturing processing error, such as the parallelism errors between the contact unit and the wafer, will lead to a difference in sensitivity. The second issue is that the BAW sensor in this article is designed to measure the surface curvature of the measured material, so it is not sensitive to the tensile strain (see
Figure A1b in
Appendix A). The bridge-like structure converts the rotation between two supports into the normal force applied to the wafer surface. To measure the tensile strain, we can rotate the current structure by 90 degrees. In this case, the wafer is vertical to the measured material and sandwiched between two supports on the left and right sides. The tensile strain will separate two supports so that the contact pressure decreases.
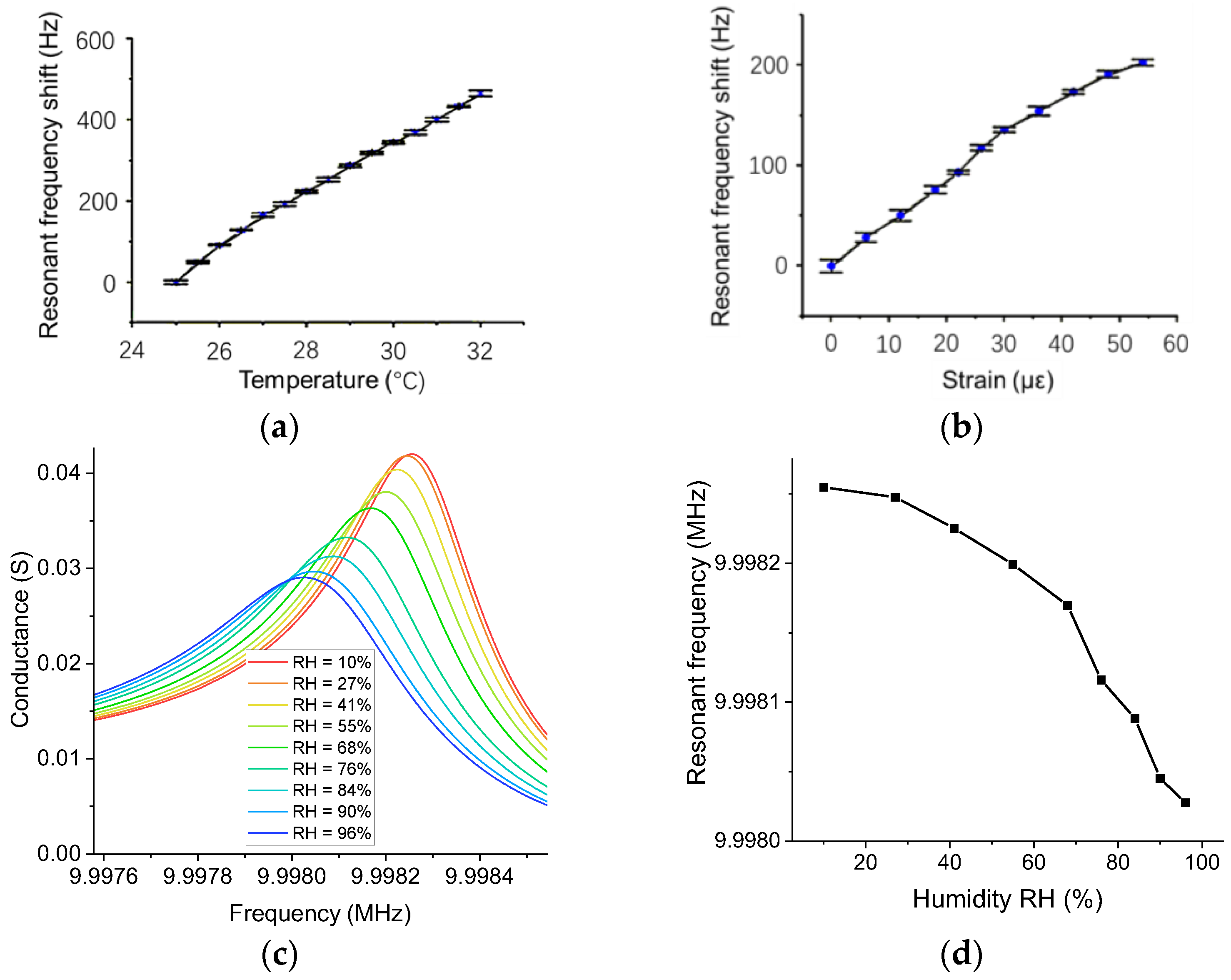
The third issue is the influence of environmental conditions on BAW strain sensors, such as humidity and temperature. As shown in
Figure 13a, the resonant frequency increases with increasing temperature. The thermal expansion of the sensor housing applied an added force to the wafer, which is superimposed on the force due to the deformation of the measured material. Therefore, the sensor requires temperature compensation to reduce the thermal effect on real applications.
Figure 13b shows the compensated results when the room temperature was inconstant. According to the relationship between the force applied to the wafer and the resonance shift, we can calculate the force due to thermal expansion
Ftemp and the total force applied to the wafer
Ftotal. Thus, the force due to strain follows
Fstrain =
Ftotal −
Ftemp. However, this method is unable to compensate for the effect of humidity. When water droplets are attached to the wafer surface, the droplets increase the mass of the wafer, so the resonant frequency decreases with increasing humidity (see
Figure 13c,d). Unlike temperature, the added mass due to humidity and the added stiffness due to strain are not superimposable, so the calibration of humidity is beyond the scope of this paper. As an alternative solution, a sealed sensor package can separate the wafer from the moisture.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




















