



A Complex of Marine Geophysical Methods for Studying Gas Emission Process on the Arctic Shelf

 , ,
, ,  ,
, 
Abstract
:1. Introduction
2. Marine Geophysical Methods for Studying Gas Emission Processes
2.1. Hydro- and Seismoacoustic Instruments
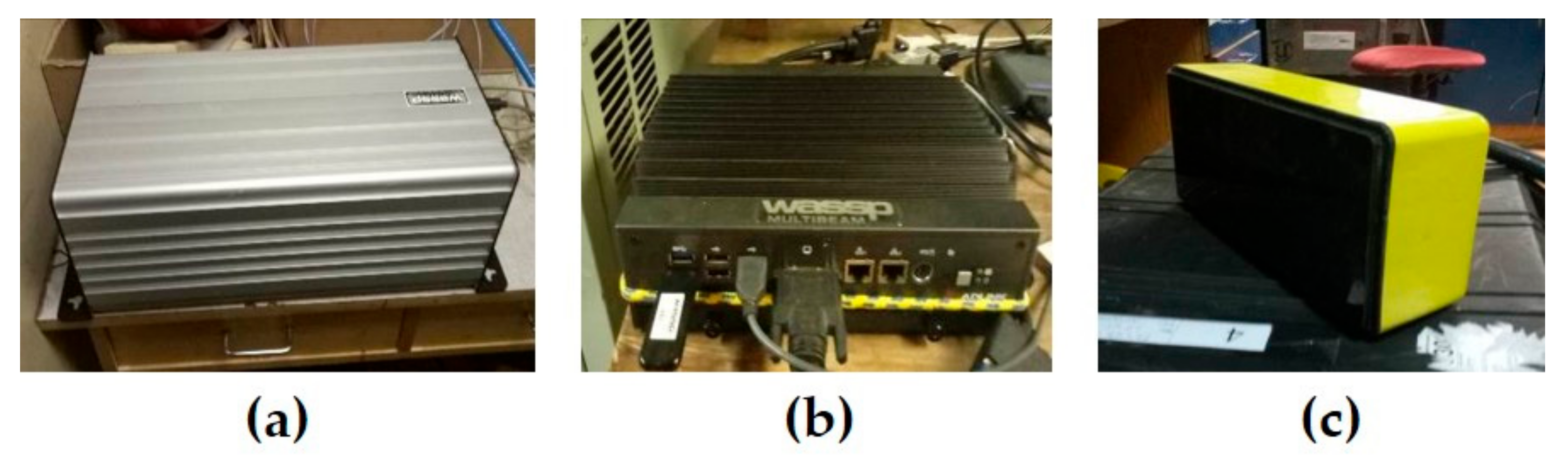
2.1.1. WASSP WMB-3250 Multibeam System
2.1.2. SES-2000 Standard Sub-Bottom Profiler
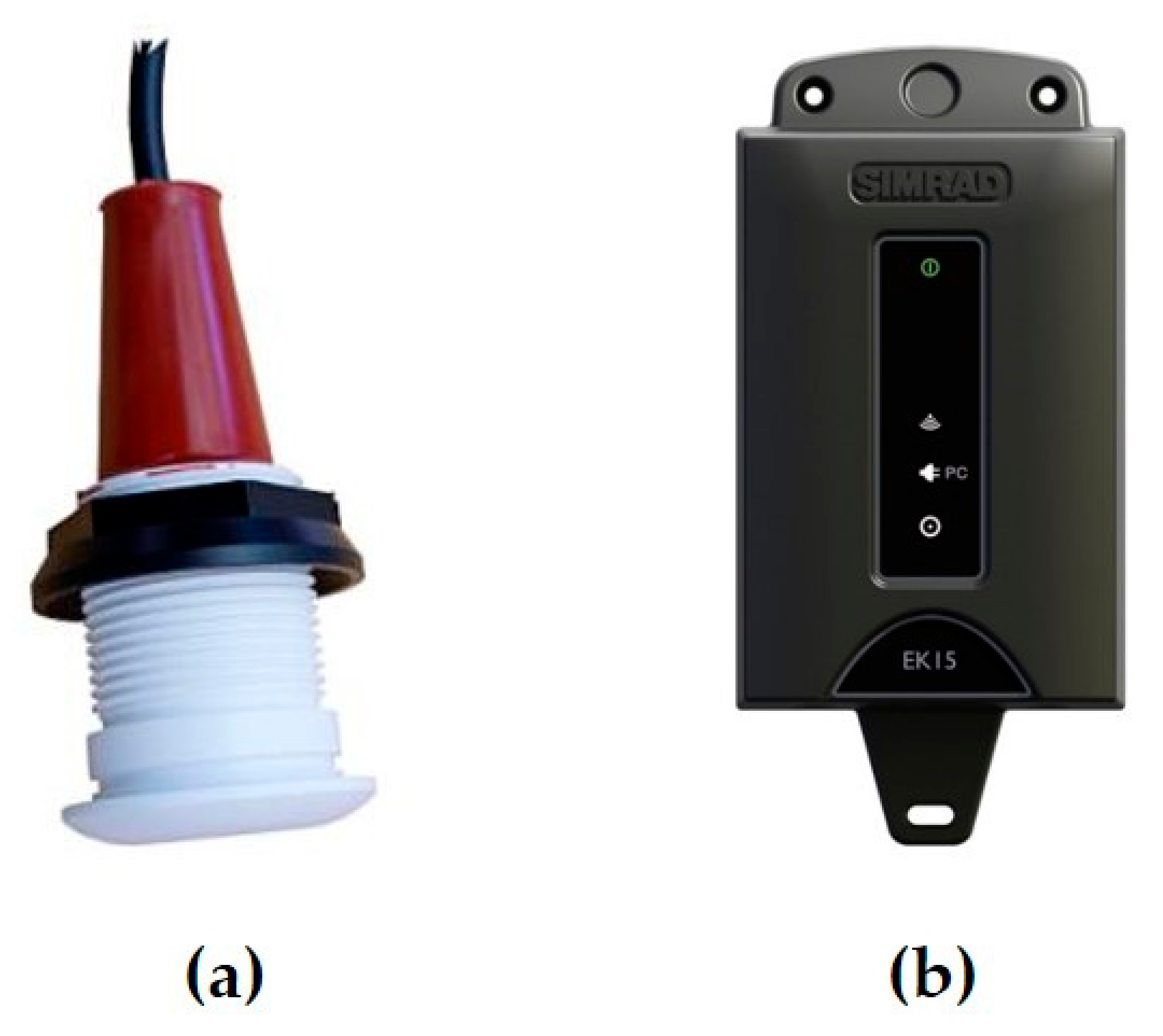
2.1.3. Simrad EK15 Single-Beam Echo Sounder
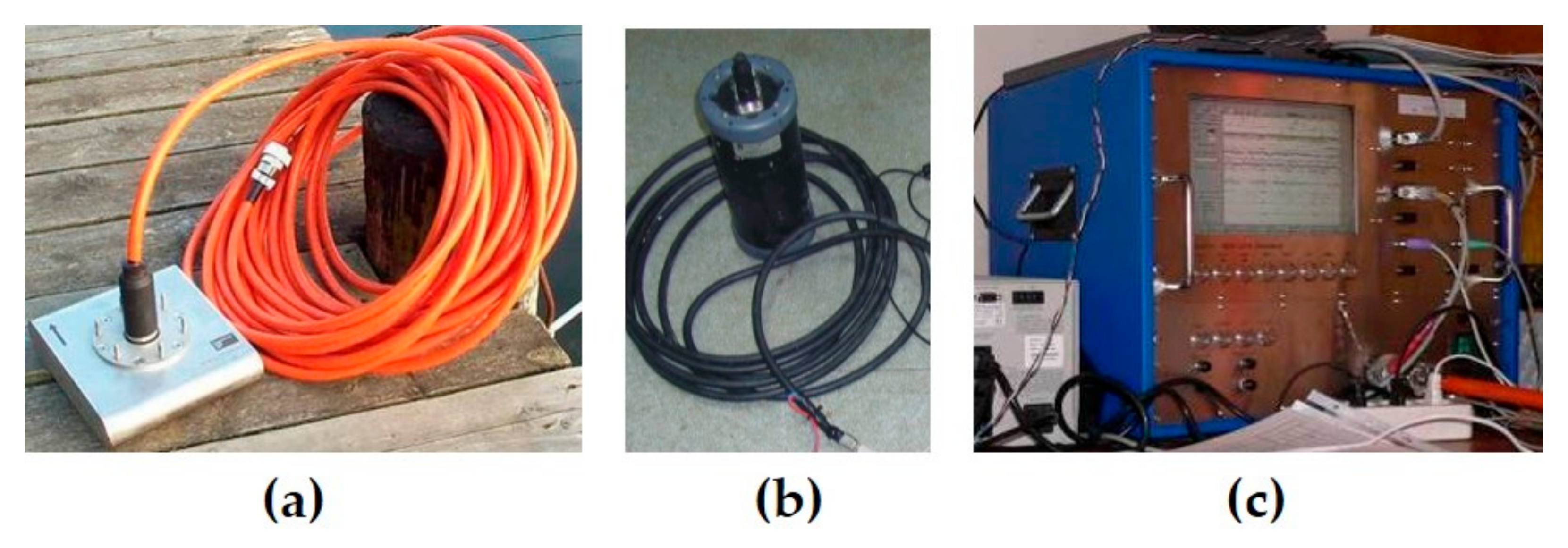
2.1.4. Continuous Seismic Profiling System
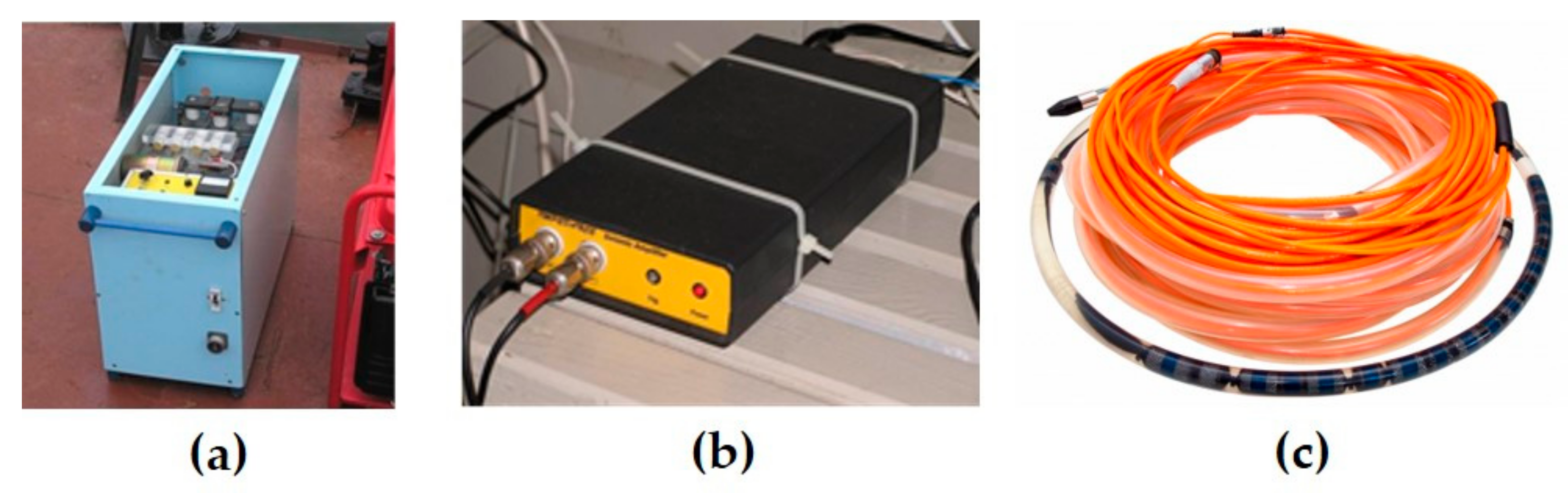
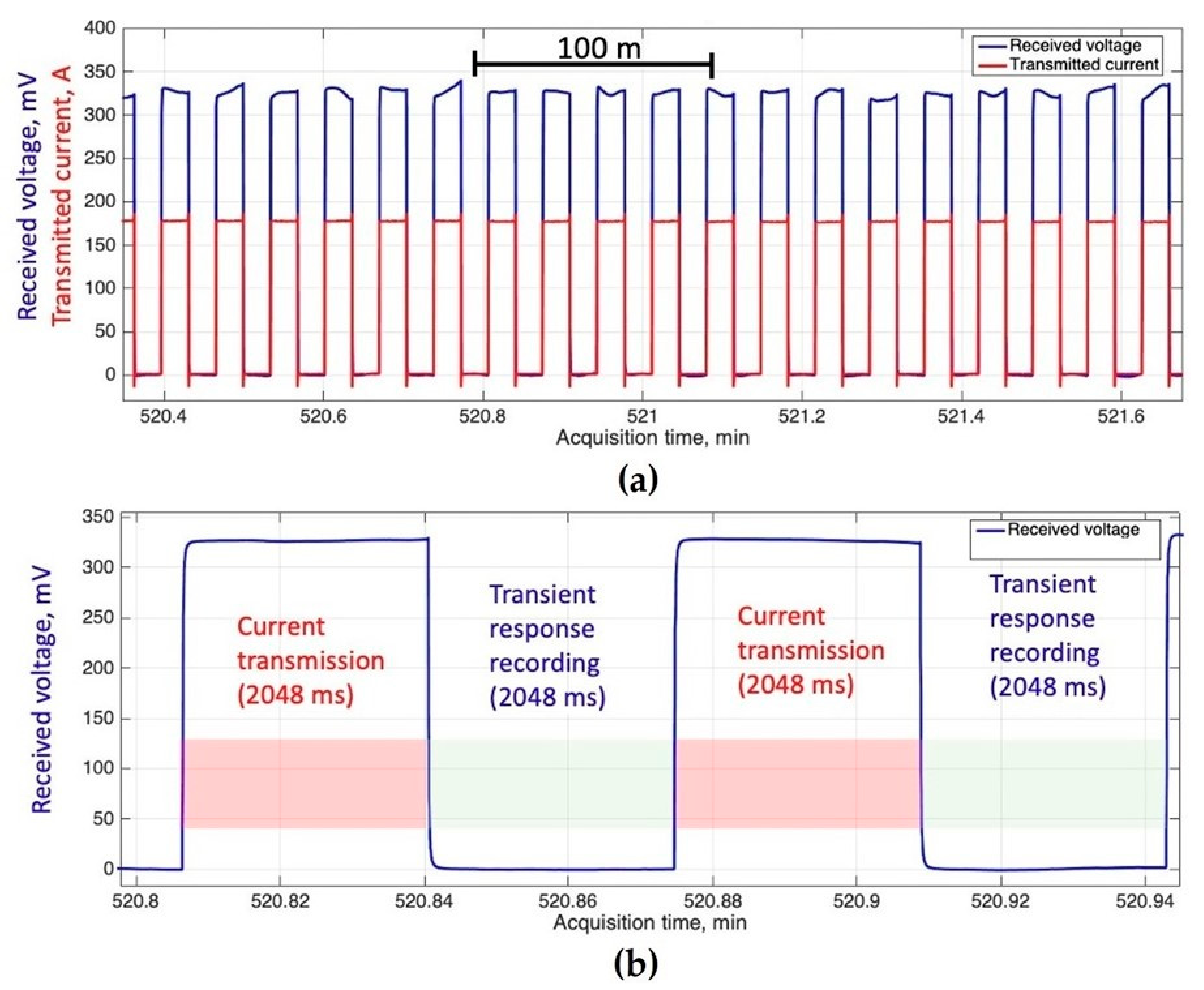
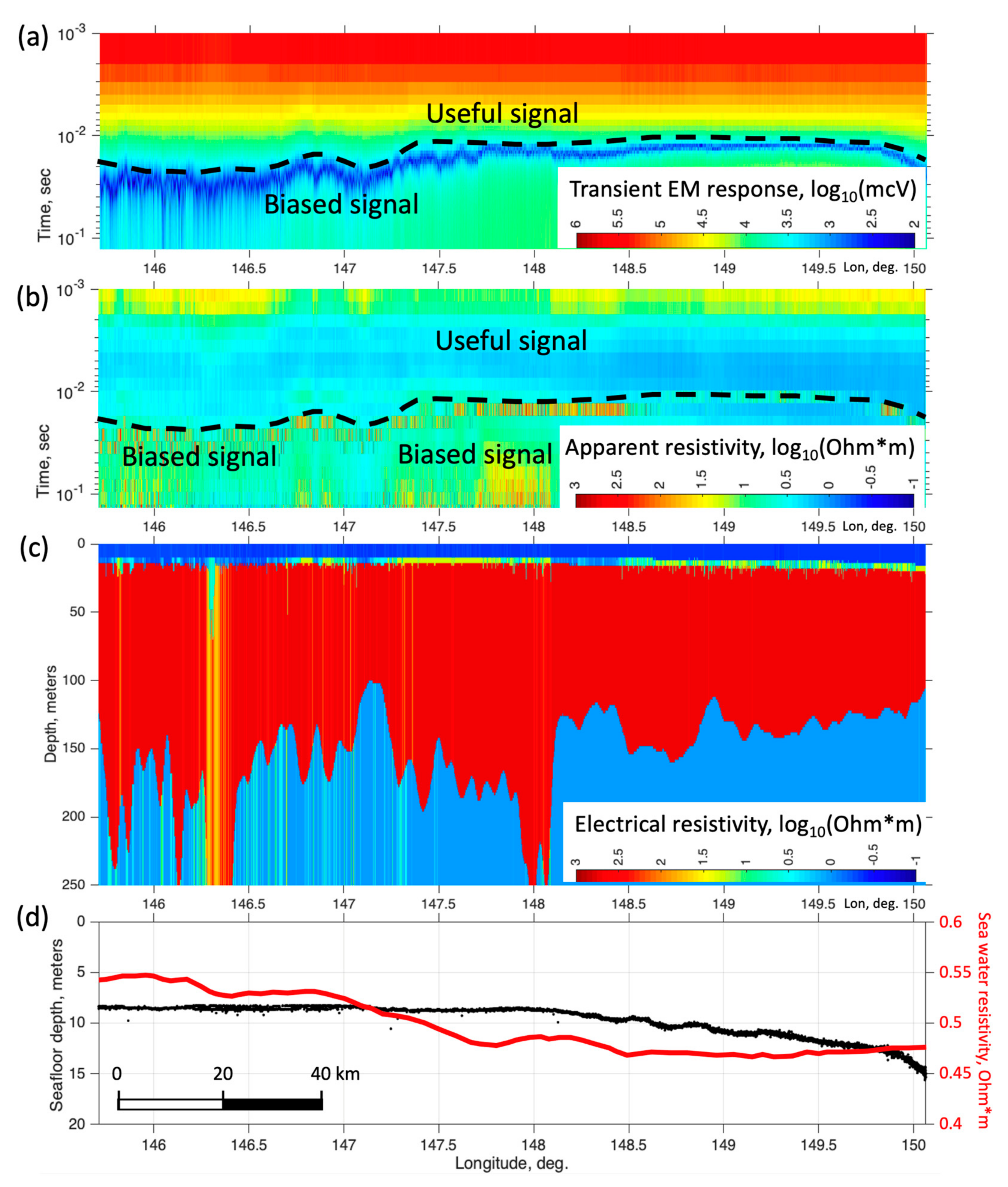
2.2. Time-Domain Electromagnetic (TDEM) Imaging System
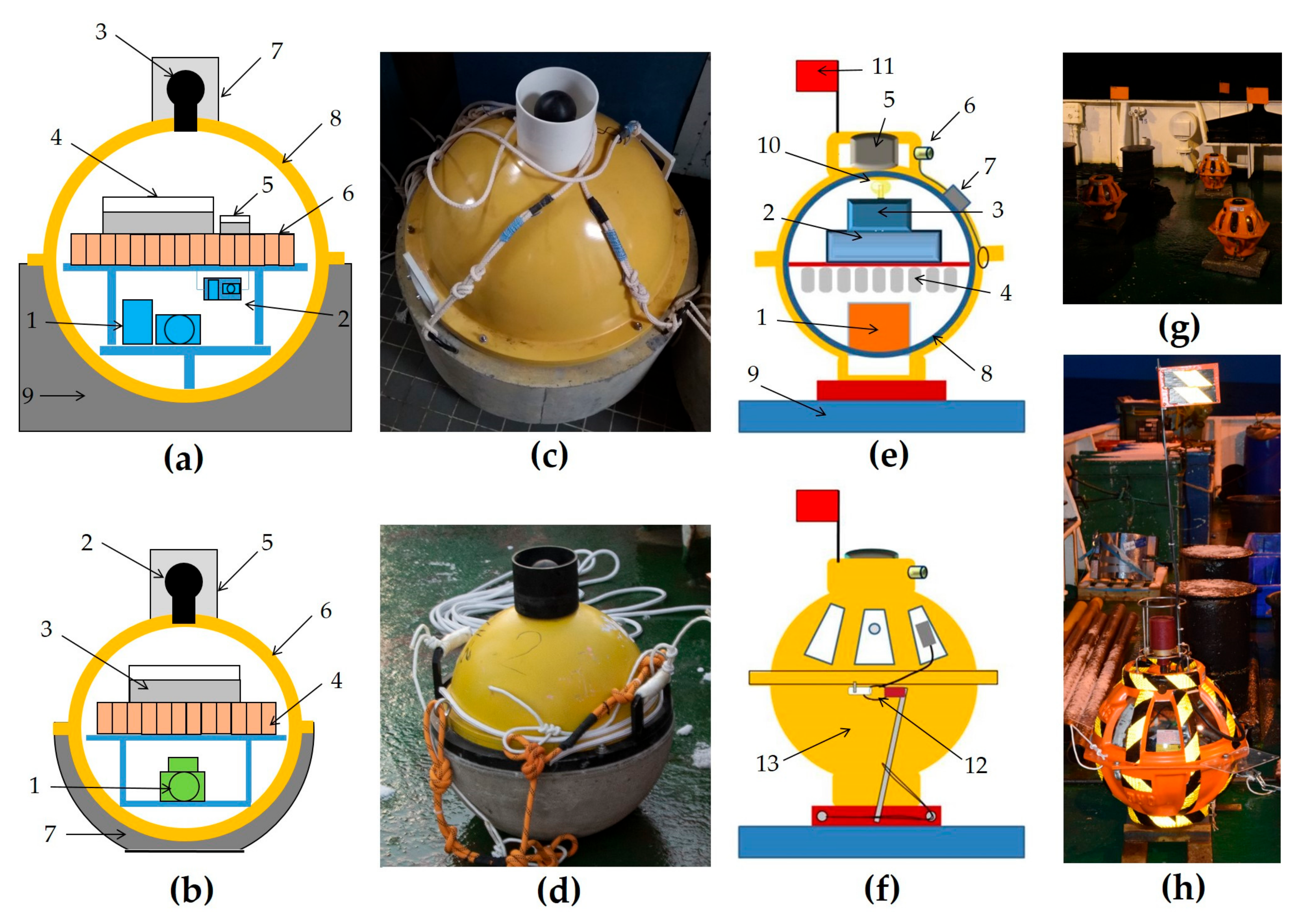
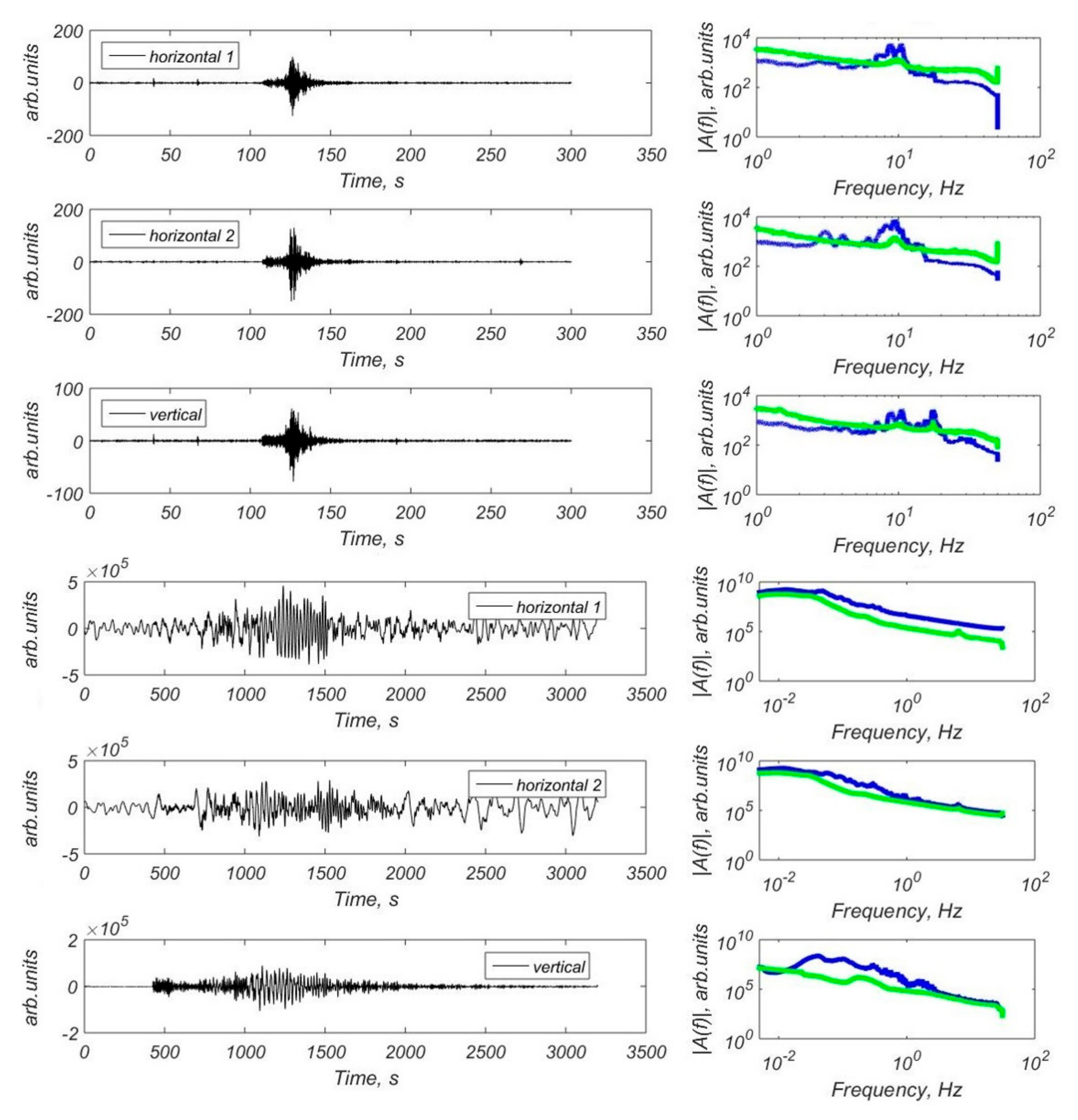
2.3. Ocean-Bottom Seismographs (OBS)
3. Results of Research in the Laptev Sea
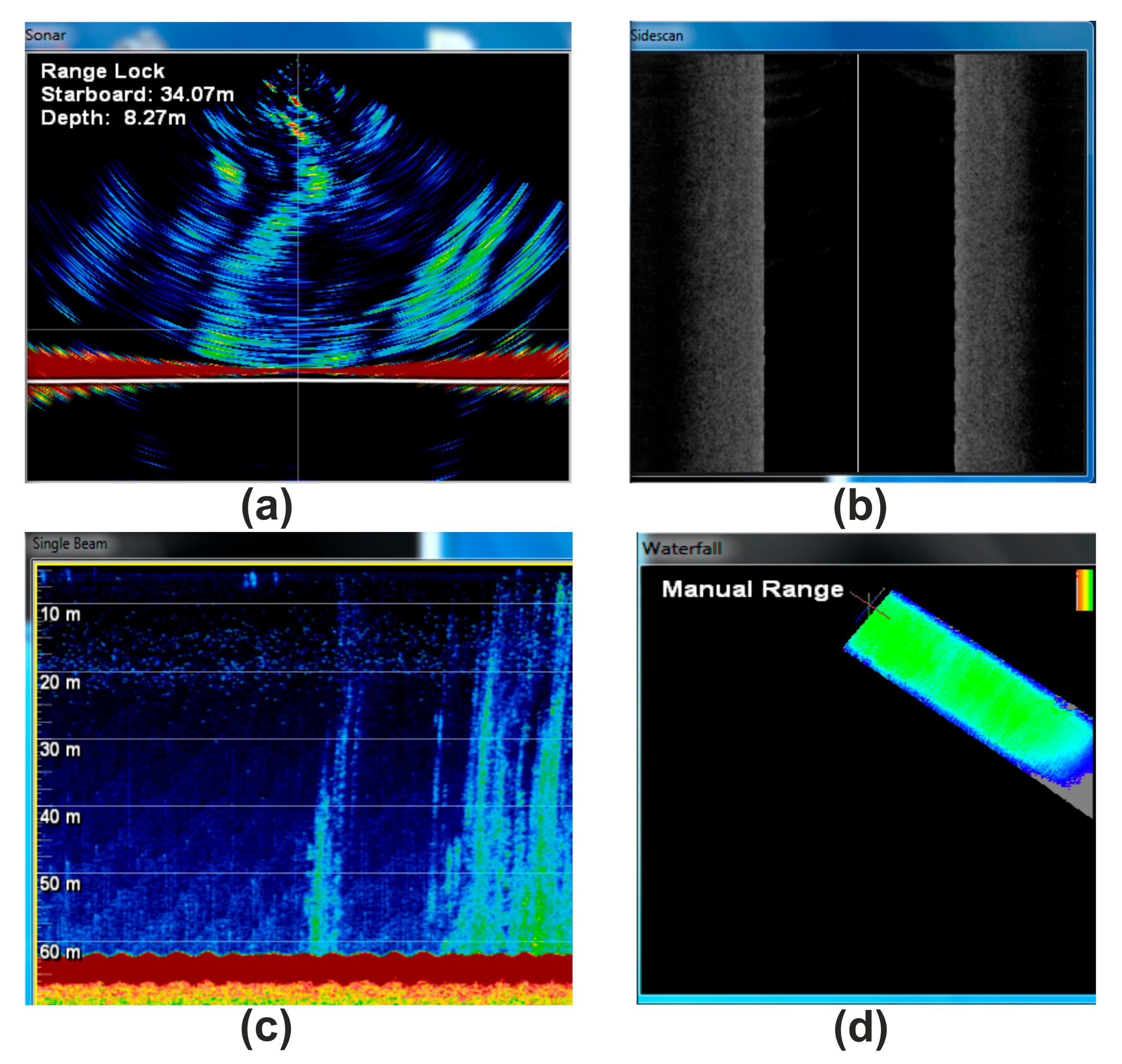
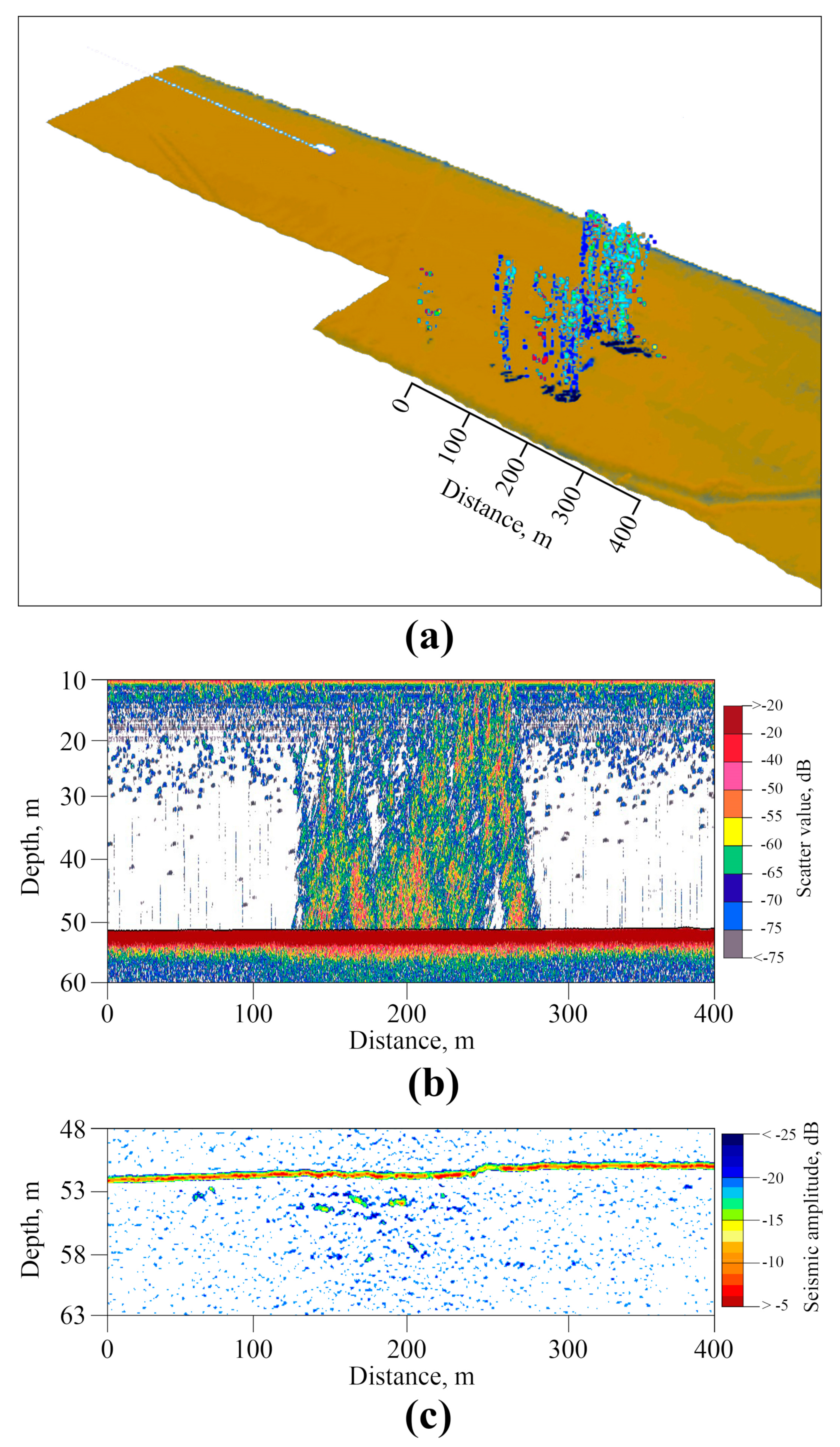
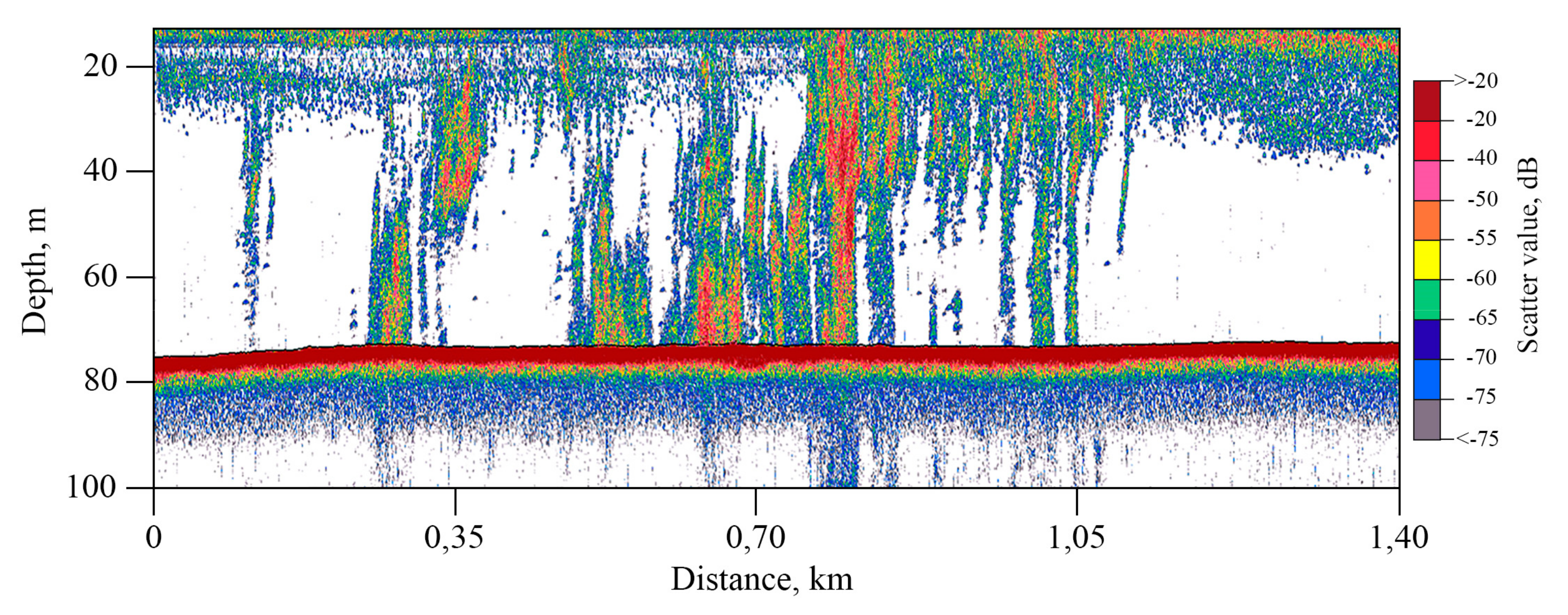
3.1. Detection and Quantification of Gas Flares
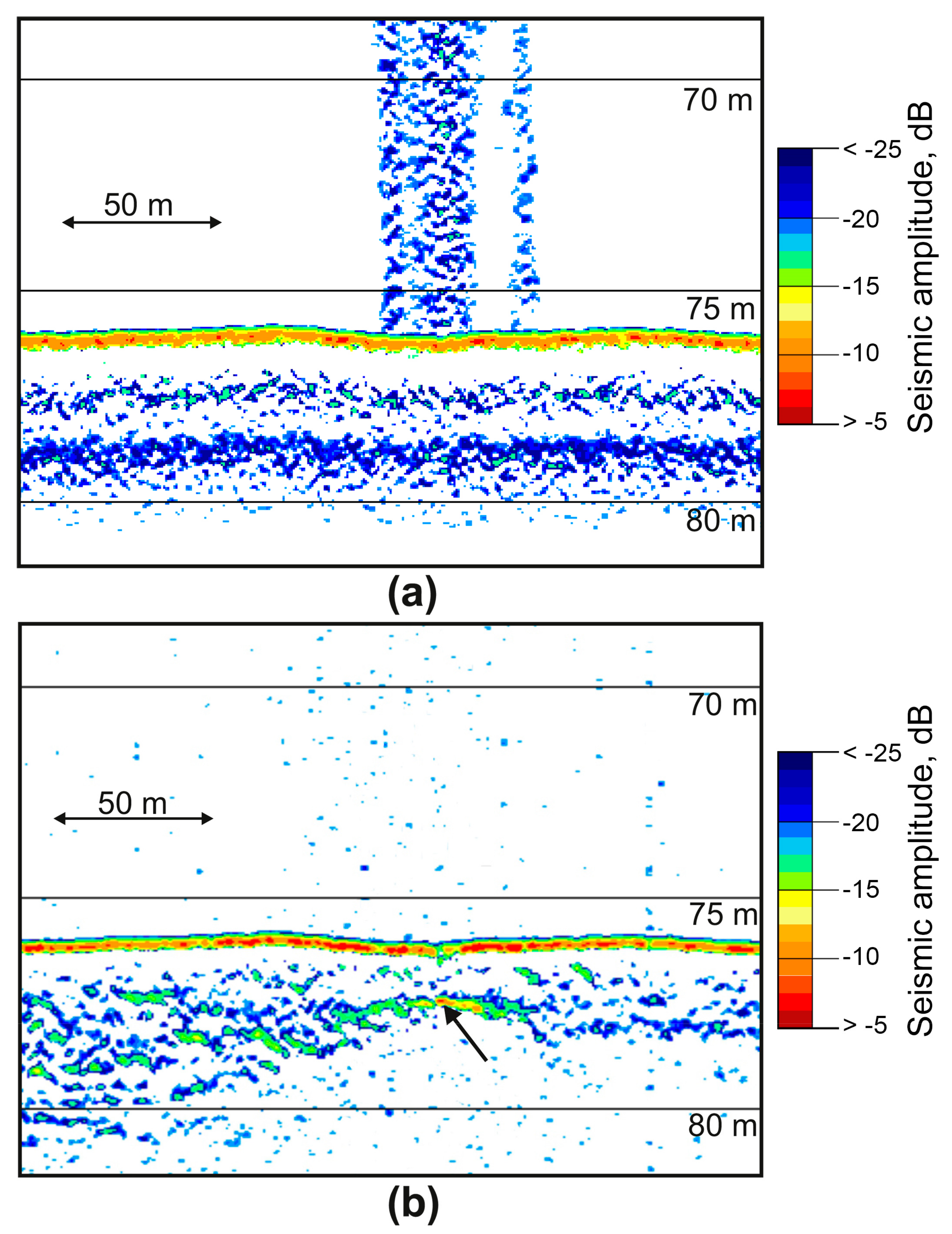
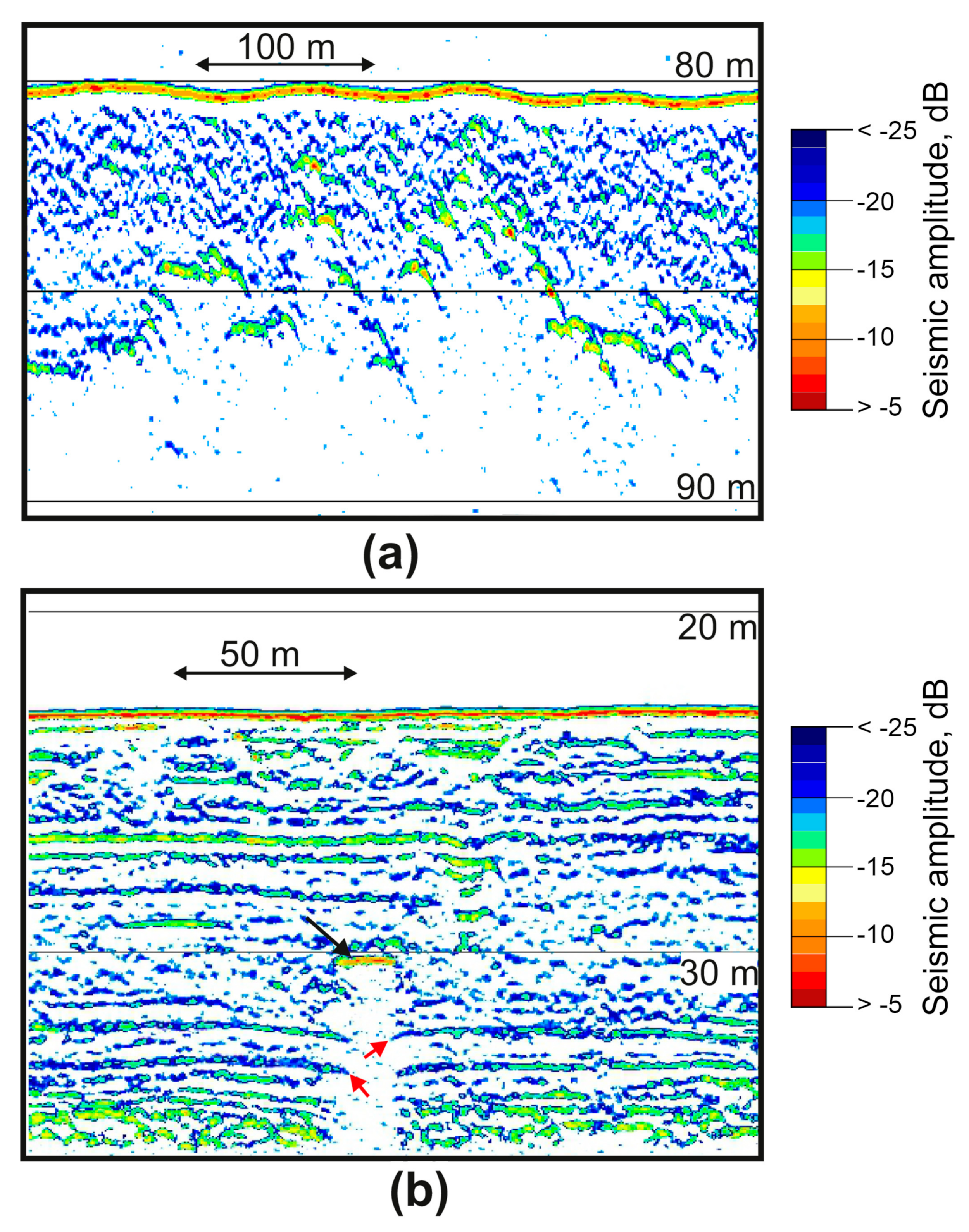
3.2. Investigation of Geological Roots of Gas Flares in Upper Part of Soil Profile
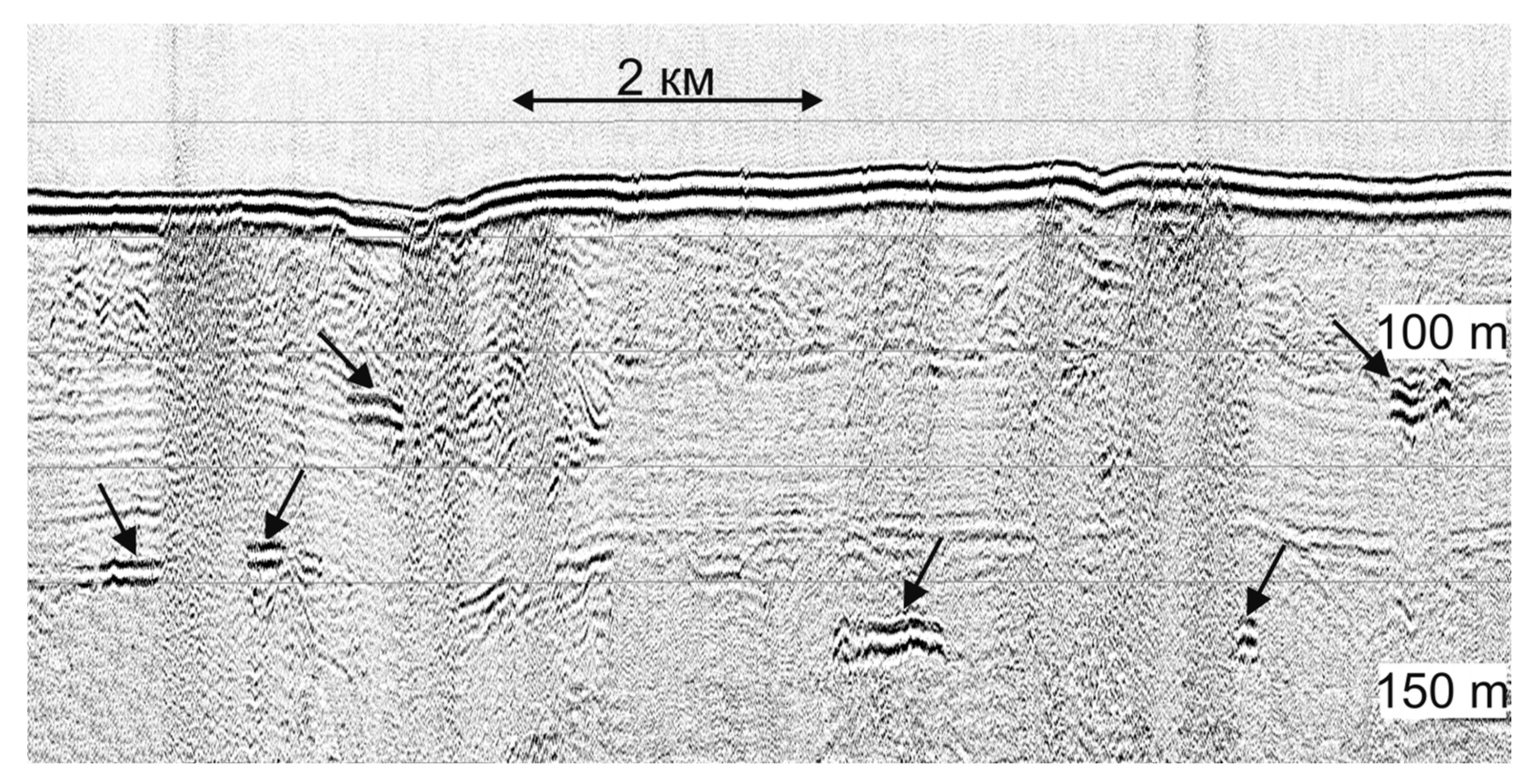
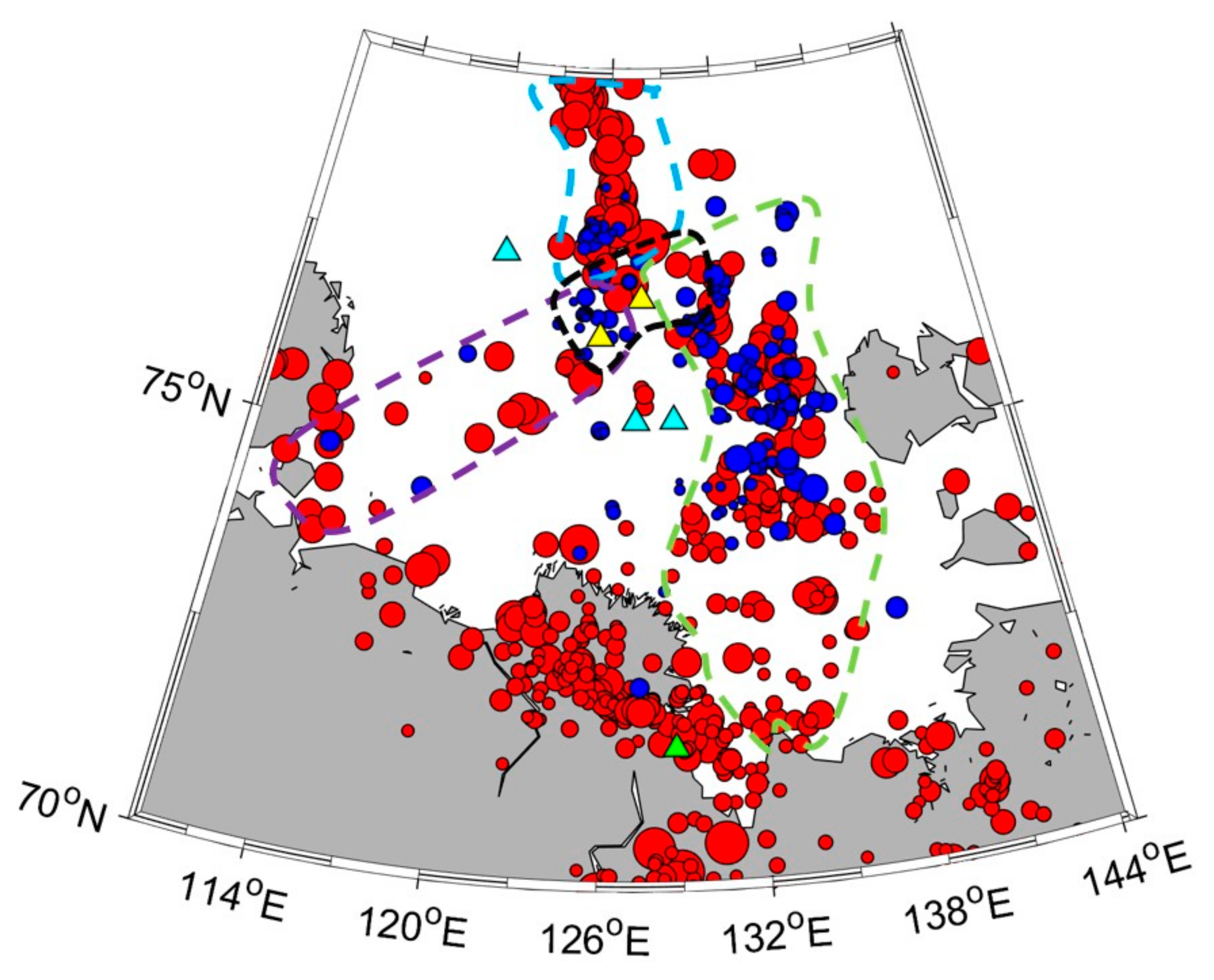
3.3. Investigation of Deep Roots of Gas Flares and Their Relation to Tectonic Processes
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mironyuk, S.G.; Semenova, A.A. Regional features of the spread of geological hazards on the shelf of the Barents Sea. In Proceedings of the Scientific-Practical Conference Engineering-Geological Problems of Our Time and Methods for Their Solution, Moscow, Russia, 13–14 April 2017; Geomarketing M: Moscow, Russia, 2017; pp. 152–160. (In Russian). [Google Scholar]
- Moroz, E.A. Recent tectonics of the Northwestern margin of the Barents Sea shelf. Monit. Sci. Technol. Earth Sci. 2016, 4, 6–13. (In Russian) [Google Scholar]
- Moroz, E.A.; Zaraiskaya, Y.A.; Sukhikh, E.A.; Sokolov, S.Y.; Ermakov, A.V.; Abramova, A.S. Relief and structure of the upper part of the sedimentary cover in the area of the Fedynsky dome according to acoustic data. Bull. Mosc. Univ. Ser. 5 Geogr. 2020, 2, 82–91. (In Russian) [Google Scholar]
- Nikiforov, S.L.; Sorokhtin, N.O.; Dmitrevskiy, N.N.; Ananiev, R.A.; Sokolov, S.Y.; Ambrosimov, A.K.; Meluzov, A.A.; Mutovkin, A.D. Researches in Cruise 38 of the R/V Akademik Nikolaj Strakhov in the Barents Sea. Oceanology 2019, 59, 801–802. [Google Scholar] [CrossRef]
- Nikiforov, S.L.; Sorohtin, N.O.; Ananiev, R.A.; Dmirevskiy, N.N.; Moroz, E.A. Comprehensive research in the Western Arctic Seas on Cruise 49 of the R/V Akademik Nikolay Strakhov in 2020. Oceanology 2021, 61, 439–441. [Google Scholar] [CrossRef]
- Shakhova, N.; Semiletov, I.; Sergienko, V.; Lobkovsky, L.; Yusupov, V.; Salyuk, A.; Salomatin, A.; Chernykh, D.; Kosmach, D.; Panteleev, G.; et al. The East Siberian Arctic Shelf: Towards further assessment of permafrost-related methane fluxes and role of sea ice. Phil. Trans. R. Soc. A 2015, 373, 20140451. [Google Scholar] [CrossRef]
- Shakhova, N.; Semiletov, I.; Gustafsson, Ö.; Sergienko, V.; Lobkovsky, L.; Dudarev, O.; Tumskoy, V.; Grigoriev, M.; Mazurov, A.; Salyuk, A.; et al. Current rates and mechanisms of subsea permafrost degradation in the East Siberian Arctic Shelf. Nat. Commun. 2017, 8, 15872. [Google Scholar] [CrossRef] [Green Version]
- Shakhova, N.; Semiletov, I.; Chuvilin, E. Understanding the Permafrost–Hydrate System and Associated Methane Releases in the East Siberian Arctic Shelf. Geosciences 2019, 9, 251. [Google Scholar] [CrossRef] [Green Version]
- Drachev, S.S.; Kaul, N.; Beliaev, V.N. Eurasia spreading basin to Laptev Shelf transition: Structural pattern and heat flow. Geophys. J. Int. 2003, 152, 688–698. [Google Scholar] [CrossRef] [Green Version]
- Ananiev, R.A.; Dmitrevsky, N.N.; Roslyakov, A.G.; Chernykh, D.V.; Moroz, E.A.; Zarayskaya, Y.A.; Semiletov, I.P. Acoustic Monitoring of Gas Emission Processes in the Arctic Shelf Seas. Oceanology 2022, 62, 127–132. [Google Scholar] [CrossRef]
- Sapart, C.J.; Shakhova, N.; Semiletov, I.; Jansen, J.; Szidat, S.; Kosmach, D.; Dudarev, O.; van der Veen, C.; Egger, M.; Sergienko, V.; et al. The origin of methane in the East Siberian Arctic Shelf unraveled with triple isotope analysis. Biogeosciences 2017, 14, 2283–2292. [Google Scholar] [CrossRef] [Green Version]
- Steinbach, J.; Holmstrand, H.; Shcherbakova, K.; Kosmach, D.; Brüchert, V.; Shakhova, N.; Salyuk, A.; Sapart, C.J.; Chernykh, D.; Noormets, R.; et al. Source apportionment of methane escaping the subsea permafrost system in the outer Eurasian Arctic Shelf. Proc. Natl. Acad. Sci. USA 2021, 118, e2019672118. [Google Scholar] [CrossRef] [PubMed]
- Field, M.E.; Jennings, A.E. Seafloor gas seeps triggered by a northern California earthquake. Mar. Geol. 1987, 77, 39–51. [Google Scholar] [CrossRef]
- Kelley, J.T.; Dickson, S.M.; Belknap, D.F.; Barnhardt, W.A.; Henderson, M. Giant sea-bed pockmarks: Evidence for gas escape from Belfast Bay. Mar. Geol. 1994, 22, 59–62. [Google Scholar] [CrossRef]
- Kuşçu, I.; Okamura, M.; Matsuoka, H.; Gökaşan, E.; Awata, Y.; Tur, H.; Şimşek, M.; Keçer, M. Seafloor gas seeps and sediment failures triggered by the August 17, 1999 earthquake in the Eastern part of the Gulf of Izmit, Sea of Marmara, NW Turkey. Mar. Geol. 2005, 215, 193–214. [Google Scholar] [CrossRef]
- Nikiforov, S.L.; Lobkovskii, L.I.; Dmitrevskii, N.N.; Ananiev, R.A.; Sorokhtin, N.O.; Khortov, A.V.; Bogdanova, O.Y. Expected geological and geomorphological risks along the Northern Sea Route. Dokl. Earth Sci. 2016, 466, 75–77. [Google Scholar] [CrossRef]
- Dmitrievskii, N.N.; Anan’ev, R.A.; Libina, N.V.; Roslyakov, A.G. Seismoacoustic studies of the upper sedimentary stratum and the seafloor relief in the East Arctic seas during the 57th cruise of the R/V Akademik M.A. Lavrent’ev. Oceanology 2012, 52, 576–578. [Google Scholar] [CrossRef]
- Sobisevich, A.L.; Presnov, D.A.; Sobisevich, L.E.; Shurup, A.S. Localization of Geological Inhomogeneities on the Arctic Shelf by Analysis of the Seismoacoustic Wave Field Mode Structure. Dokl. Earth Sci. 2018, 479, 355–357. [Google Scholar] [CrossRef]
- Krylov, A.A.; Ivashchenko, A.I.; Kovachev, S.A.; Tsukanov, N.V.; Kulikov, M.E.; Medvedev, I.P.; Ilinskiy, D.A.; Shakhova, N.E. The Seismotectonics and Seismicity of the Laptev Sea Region: The Current Situation and a First Experience in a Year-Long Installation of Ocean Bottom Seismometers on the Shelf. J. Volcanol. Seismol. 2020, 14, 379–393. [Google Scholar] [CrossRef]
- Krylov, A.A.; Egorov, I.V.; Kovachev, S.A.; Ilinskiy, D.A.; Ganzha, O.Y.; Timashkevich, G.K.; Roginskiy, K.A.; Kulikov, M.E.; Novikov, M.A.; Ivanov, V.N.; et al. Ocean-Bottom Seismographs Based on Broadband MET Sensors: Architecture and Deployment Case Study in the Arctic. Sensors 2021, 21, 3979. [Google Scholar] [CrossRef]
- Ananyev, R.; Dmitrevskiy, N.; Jakobsson, M.; Lobkovsky, L.; Nikiforov, S.; Roslyakov, A.; Semiletov, I. Sea-ice ploughmarks in the eastern Laptev Sea, East Siberian Arctic shelf. Geol. Soc. Lond. Mem. 2016, 46, 301–302. [Google Scholar] [CrossRef]
- Dmitrevskiy, N.N.; Ananyev, R.A.; Libina, N.V.; Roslyakov, A.G. Utilizing a seismoacoustic complex for the study of the upper sedimentary stratum and seafloor relief in East Arctic. Oceanology 2013, 53, 368–373. [Google Scholar] [CrossRef]
- Nabighian, M.; Macnae, J. Time domain electromagnetic prospecting methods. In Electromagnetic Methods in Applied Geophysics; Nabighian, M., Ed.; Society of Exploration Geophysicists: Houston, TX, USA, 1991; Chapter 6; p. 2. [Google Scholar]
- Kaufman, A.A.; Alekseev, D.; Oristaglio, M. Methods in Geochemistry and Geophysics Ser. In Principles of Electromagnetic Methods in Surface Geophysics, 1st ed.; Elsevier: Amsterdam, The Netherlands, 2014. [Google Scholar]
- Constable, S. Review paper: Instrumentation for marine magnetotelluric and controlled source electromagnetic sounding. Geophys. Prospect. 2013, 61, 505–532. [Google Scholar] [CrossRef]
- R-Sensors, Seismic Instruments for Science and Engineering. Available online: http://www.r-sensors.ru/en/ (accessed on 31 December 2022).
- Krylov, A.A.; Kulikov, M.E.; Kovachev, S.A.; Medvedev, I.P.; Lobkovsky, L.I.; Semiletov, I.P. Peculiarities of the HVSR Method Application to Seismic Records Obtained by Ocean-Bottom Seismographs in the Arctic. Appl. Sci. 2022, 12, 9576. [Google Scholar] [CrossRef]
- Anderson, A.L.; Bryant, W.R. Gassy sediment occurrence and properties: Northern Gulf of Mexico. Geo-Mar. Lett. 1990, 10, 209–220. [Google Scholar] [CrossRef]
- Osterkamp, T.E. Sub-sea permafrost. In Encyclopedia of Ocean Sciences, 2nd ed.; Elsevier Inc.: Amsterdam, The Netherlands, 2001; pp. 559–569. [Google Scholar]
- Koshurnikov, A.V.; Tumskoy, V.E.; Shakhova, N.E.; Sergienko, V.I.; Dudarev, O.V.; Gunar, A.Y.; Pushkarev, P.Y.; Semiletov, I.P.; Koshurnikov, A.A. The first ever application of electromagnetic sounding for mapping the submarine permafrost table on the Laptev Sea. Dokl. Earth Sci. 2016, 469, 860–863. [Google Scholar] [CrossRef]
- Piskunova, E.A.; Palshin, N.A.; Yakovlev, D.V. Electrical conductivity features of the Arctic shelf permafrost and electro-magnetic technologies for their studies. Russ. J. Earth Sci. 2018, 18, ES5001. [Google Scholar] [CrossRef] [Green Version]
- Lewis, E.L.; Perkin, R.G. The practical salinity scale 1978: Conversion of existing data. Deep. Sea Res. Part A Oceanogr. Res. Pap. 1981, 28, 307–328. [Google Scholar] [CrossRef]
- Krylov, A.A.; Lobkovsky, L.I.; Ivashchenko, A.I. Automated detection of microearthquakes in continuous noisy records produced by local ocean bottom seismographs or coastal networks. Russ. J. Earth Sci. 2019, 19, ES2001. [Google Scholar] [CrossRef] [Green Version]
- Krylov, A.A.; Alekseev, D.A.; Kovachev, S.A.; Radiuk, E.A.; Novikov, M.A. Numerical Modeling of Nonlinear Response of Seafloor Porous Saturated Soil Deposits to SH-Wave Propagation. Appl. Sci. 2021, 11, 1854. [Google Scholar] [CrossRef]
- Chava, A.; Gebruk, A.; Kolbasova, G.; Krylov, A.; Tanurkov, A.; Gorbuskin, A.; Konovalova, O.; Migali, D.; Ermilova, Y.; Shabalin, N.; et al. At the interface of marine disciplines: Use of autonomous seafloor equipment for studies of biofouling below the shallow-water zone. Oceanography 2021, 34, 61–70. [Google Scholar] [CrossRef]
- Krylov, A.A.; Kovachev, S.A.; Radiuk, E.A.; Roginskiy, K.A.; Novikov, M.A.; Samylina, O.S.; Lobkovsky, L.I.; Semiletov, I.P. MatNERApor—A Matlab Package for Numerical Modeling of Nonlinear Response of Porous Saturated Soil Deposits to P- and SH-Waves Propagation. Appl. Sci. 2022, 12, 4614. [Google Scholar] [CrossRef]
- Krylov, A.A.; Lobkovsky, L.I.; Rukavishnikova, D.D.; Baranov, B.V.; Kovachev, S.A.; Dozorova, K.A.; Tsukanov, N.V.; Semiletov, I.P. New Data on Seismotectonics of the Laptev Sea from Observations by Ocean Bottom Seismographs. Dokl. Earth Sci. 2022, 507, 936–940. [Google Scholar] [CrossRef]
- U.S. Geological Survey. Available online: https://earthquake.usgs.gov/earthquakes/search/ (accessed on 31 December 2022).
- International Seismological Centre. Available online: http://www.isc.ac.uk/iscbulletin/search/ (accessed on 31 December 2022).
- “Earthquakes of Russia” Database. Geophysical Survey of the Russian Academy of Sciences. Available online: http://eqru.gsras.ru/ (accessed on 31 December 2022).
- Bergès, B.; Leighton, T.; White, P. Passive acoustic quantification of gas fluxes during controlled gas release experiments. Int. J. Greenh. Gas Control 2015, 38, 64–79. [Google Scholar] [CrossRef] [Green Version]
- Blomberg, A.; Sæbø, T.; Hansen, R.; Pedersen, R.B.; Austeng, A. Automatic detection of marine gas seeps using an interferometric sidescan sonar. IEEE J. Ocean. Eng. 2016, 42, 590–602. [Google Scholar] [CrossRef]
- Leifer, I.; Chernykh, D.; Shakhova, N.; Semiletov, I. Sonar gas flux estimation by bubble insonification: Application to methane bubble fluxes from the East Siberian Arctic shelf seabed. Cryosphere 2017, 11, 1333–1350. [Google Scholar] [CrossRef] [Green Version]
- Weidner, E.; Weber, T.C.; Mayer, L.; Jakobsson, M.; Chernykh, D.; Semiletov, I. A wideband acoustic method for direct assessment of bubble-mediated methane flux. Cont. Shelf Res. 2019, 173, 104–115. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Roche, B.; Bull, J.; White, P.R.; Leighton, T.G.; Provenzano, G.; Dewar, M.; Henstock, T.J. Broadband acoustic inversion for gas flux quantification—Application to a methane plume at Scanner Pockmark, central North Sea. J. Geophys. Res. Ocean. 2020, 125, e2020JC016360. [Google Scholar] [CrossRef]
- Chernykh, D.V.; Yusupov, V.I.; Salomatin, A.S.; Kosmach, D.A.; Konstantinov, A.V.; Silionov, V.I.; Mazurov, A.K.; Salyuk, A.N.; Shakhova, N.E.; Gustafsson, O.; et al. New acoustical technique to quantify methane ebullition in sediment water column: A case study in the Laptev sea, the Arctic ocean. Bull. Tomsk Polytech. Univ. Geo Assets Eng. 2018, 329, 153–167. [Google Scholar] [CrossRef]
- Muyakshin, S.; Sauter, E. The hydroacoustic method for the quantification of the gas flux from a submersed bubble plume. Oceanology 2010, 50, 995–1001. [Google Scholar] [CrossRef]
- James, R.H.; Bousquet, P.; Bussmann, I.; Haeckel, M.; Kipfer, R.; Leifer, I.; Niemann, H.; Ostrovsky, I.; Piskozub, J.; Rehder, G.; et al. Effects of climate change on methane emissions from seafloor sediments in the Arctic Ocean: A review. Limnol. Oceanogr. 2016, 61, S283–S299. [Google Scholar] [CrossRef] [Green Version]
- Chernykh, D.; Yusupov, V.; Salomatin, A.; Kosmach, D.; Shakhova, N.; Gershelis, E.; Konstantinov, A.; Grinko, A.; Chuvilin, E.; Dudarev, O.; et al. Sonar estimation of methane bubble flux from thawing subsea permafrost: A case study from the laptev sea shelf. Geosciences 2020, 10, 411. [Google Scholar] [CrossRef]
- Ruban, A.; Rudmin, M.; Mazurov, A.; Chernykh, D.; Dudarev, O.; Semiletov, I. Cold-seep carbonates of the Laptev Sea continental slope: Constraints from fluid sources and environment of formation. Chem. Geol. 2022, 610, 121103. [Google Scholar] [CrossRef]
- Wild, B.; Shakhova, N.; Dudarev, O.; Ruban, A.; Kosmach, D.; Tumskoy, V.; Tesi, T.; Grimm, H.; Nybom, I.; Matsubara, F.; et al. Organic matter composition and greenhouse gas production of thawing subsea permafrost in the Laptev Sea. Nat. Commun. 2022, 13, 5057. [Google Scholar] [CrossRef] [PubMed]
- Shakhova, N.; Semiletov, I.; Leifer, I.; Sergienko, V.; Salyuk, A.; Kosmach, D.; Chernykh, D.; Stubbs, C.; Nicolsky, D.; Tumskoy, V.; et al. Ebullition and storm-induced methane release from the East Siberian Arctic Shelf. Nat. Geosci. 2014, 7, 64–70. [Google Scholar] [CrossRef]
- Overduin, P.P.; Westermann, S.; Yoshikawa, K.; Haberlau, T.; Romanovsky, V.; Wetterich, S. Geoelectric observations of the degradation of nearshore submarine permafrost at Barrow (Alaskan Beaufort Sea). J. Geophys. Res. 2012, 117, F02004. [Google Scholar] [CrossRef]
- Angelopoulos, M.; Westermann, S.; Overduin, P.P.; Faguet, A.; Olenchenko, V.; Grosse, G.; Grigoriev, M.N. Heat and salt flow in subseapermafrost modeled with CryoGRID2. J. Geophys. Earth Surf. 2019, 124, 920–937. [Google Scholar] [CrossRef] [Green Version]
- Angelopoulos, M.; Overduin, P.P.; Jenrich, M.; Nitze, I.; Günther, F.; Strauss, J.; Westermann, S.; Schirrmeister, L.; Kholodov, A.; Krautblatter, M.; et al. Onshore thermokarst primes subsea permafrost degradation. Geophys. Res. Lett. 2021, 48, e2021GL093881. [Google Scholar] [CrossRef]
- Arboleda-Zapata, M.; Angelopoulos, M.; Overduin, P.P.; Grosse, G.; Jones, B.M.; Tronicke, J. Exploring the capabilities of electrical resistivity tomography to study subsea permafrost. Cryosphere 2022, 16, 4423–4445. [Google Scholar] [CrossRef]
- Giannino, F.; Leucci, G. Electromagnetic Methods in Geophysics: Applications in GeoRadar, FDEM, TDEM, and AEM; Wiley: Hoboken, NJ, USA, 2021. [Google Scholar]
- Goncharov, A.A.; Alekseev, D.A.; Koshurnikov, A.V.; Gunar, A.Y.; Semiletov, I.P.; Pushkarev, P.Y. Using Pseudo-Random Code Sequences for Improving the Efficiency of Near-Field Transient Electromagnetic Sounding on the Arctic Shelf. Izv. Phys. Solid Earth 2022, 58, 744–754. [Google Scholar] [CrossRef]
- Barsukov, P.O.; Fainberg, E.B. Transient marine electromagnetics in shallow water: A sensitivity and resolution study of the vertical electric field at short ranges. Geophysics 2014, 79, E39–E49. [Google Scholar] [CrossRef]
- Nakayama, K.; Saito, A. Practical marine TDEM systems using ROV for the ocean bottom hydrothermal deposits. Techno-Ocean 2016, 643–647. [Google Scholar] [CrossRef]
- Romanovskii, N.N.; Kholodov, A.L.; Gavrilov, A.V.; Tumskoy, V.E.; Hubberten, H.W.; Kassens, H. Thickness of ice-bonded permafrost in the eastern part of the Laptev Sea shelf. Earth’s Cryosphere 2003, 3, 65–75. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Frequency | 160 kHz |
| Beam width | 224 beams equidistant spacing over 120° port/starboard swath |
| Seafloor coverage | Up to 3.4 × depth |
| TX rate | Automatic ping rate, determined by depth. Max ping rate 40 Hz. |
| Output power | Up to 1 kW |
| Depth range | 2–200 m |
| Depth resolution | 7.5 cm |
| Transducer dimensions | 33–17–10 cm |
| Parameter | Value |
|---|---|
| Primary frequencies | approx. 100 kHz (band 95–110 kHz) |
| Secondary low frequencies | 4–15 kHz |
| Pulse width | 0.07–0.8 ms |
| Pulse rate | Up to 30/s |
| Power consumption | Up to 1 KW |
| Beam width | ±1.8° |
| Water depth range | 1–500 m |
| Penetration | Up to 50 m |
| Layer resolution | Up to 5 cm |
| Parameter | Value |
|---|---|
| Operational frequency | 200 kHz |
| Typical depth range | 200 m |
| Ping rate | up to 40 Hz |
| Pulse durations | 80 to 1240 μs |
| Data rate | 1.6 Mbps |
| Maximum number in use | 15 |
| Output power | 45 W |
| Raw data | EK60 format |
| Maximum installation depth | 600 m |
| Beamwidth | 26° |
| Parameter | Value |
|---|---|
| Seismic recorder PSA-1 | |
| Frequency range | 60–1200 Hz |
| Dynamic range | 120 dB |
| Gain ratio | 1 to 1000 |
| SPES-600 energy source | |
| Maximum voltage | 5 kV |
| Operating energy | 5–600 J |
| Towed streamer | |
| Number of channels | 1 to 32 |
| Interval between channels | 2 m |
| Parameter | Value |
|---|---|
| MPSSR | |
| Sensors | three-component seismometer CME-3311, three-component geophone SH/SV-10, hydrophone 5007 m |
| Frequency Band (CME-4311) | 0.0167–50 Hz |
| Sensitivity (CME-4311) | 2000 V/(m/s) |
| Frequency Band (SH/SV-10) | 10–250 Hz |
| Sensitivity (SH/SV-10) | 28 V/(m/s) |
| Frequency Band (5007 m) | 0.04–2500 Hz |
| Sensitivity (5007 m) | 7.2 ± 0.5 mV/Pa |
| Maximum depth | 3000 m |
| Sample rates, Hz | 20, 25, 40, 50, 80, 100, 160, 200, 400, 800 |
| Time synchronization | GPS interface |
| Temperature stability of the quartz generator | ±5 × 10−9 |
| Memory | SD card up to 64 Gb |
| Typhoon | |
| Sensors | three-component seismometer CME-3311, hydrophone 5007 m |
| Frequency Band (CME-3311) | 1–50 Hz |
| Sensitivity (CME-3311) | 2000 V/(m/s) |
| Frequency Band (5007 m) | 0.04–2500 Hz |
| Sensitivity (5007 m) | 7.2 ± 0.5 mV/Pa |
| Maximum depth | 2000 m |
| Sample rates, Hz | 20, 25, 40, 50, 80, 100, 160, 200, 400, 800 |
| Time synchronization | GPS interface |
| Temperature stability of the quartz generator | ±5 × 10−9 |
| Memory | SD card up to 64 Gb |
| Parameter | Value |
|---|---|
| GNS | |
| Sensors | three-component seismometer SM-6, hydrophone HTI-94-SSQ |
| Natural frequency (SM-6) | 4.5 Hz |
| Sensitivity (SM-6) | 28.8 V/(m/s) |
| Frequency Band (HTI-94-SSQ) | 2–30,000 Hz |
| Sensitivity (HTI-94-SSQ) | 12.6 V/Bar (without preamp) |
| Maximum depth | 6000 m |
| Sample rates, Hz | 62.5, 125, 250, 500, 1000, 2000, 4000 |
| Time synchronization | GPS interface |
| Temperature stability of the quartz generator | ± 5 × 10−9 |
| Memory | SD card up to 128 Gb |
| GNS-C | |
| Sensors | three-component seismometer CME-4111, hydrophone EDBOE RAS |
| Frequency Band (CME-4111) | 0.0083–50 Hz |
| Sensitivity (CME-4111) | 4000 V/(m/s) |
| Frequency Band (hydrophone) | 0.067–30,000 Hz |
| Sensitivity (hydrophone) | 200 V/bar |
| Maximum depth | 6000 m |
| Sample rates, Hz | 62.5, 125, 250, 500, 1000, 2000, 4000 |
| Time synchronization | GPS interface |
| Temperature stability of the quartz generator | ± 5 × 10−9 |
| Memory | SD card up to 128 Gb |
| Model Parameter | Layer 1 (Sea Water) | Layer 2 (Unfrozen Bottom Sediments) | Layer 3 (IBP/Thawed Sediments) | Layer 4 (Sub-Permafrost Sediments) |
|---|---|---|---|---|
| Resistivity, Ohm·m | 0.25–0.7 (Constrained to within 20% of seawater resistivity estimated from salinity data) | 0.8–100 | 1–200 | 1–1000 |
| Thickness, m | 5–100 (Constrained to within 10% of true model bathymetry value) | 5–100 | 10–200 | Not applicable |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krylov, A.A.; Ananiev, R.A.; Chernykh, D.V.; Alekseev, D.A.; Balikhin, E.I.; Dmitrevsky, N.N.; Novikov, M.A.; Radiuk, E.A.; Domaniuk, A.V.; Kovachev, S.A.; et al. A Complex of Marine Geophysical Methods for Studying Gas Emission Process on the Arctic Shelf. Sensors 2023, 23, 3872. https://doi.org/10.3390/s23083872
Krylov AA, Ananiev RA, Chernykh DV, Alekseev DA, Balikhin EI, Dmitrevsky NN, Novikov MA, Radiuk EA, Domaniuk AV, Kovachev SA, et al. A Complex of Marine Geophysical Methods for Studying Gas Emission Process on the Arctic Shelf. Sensors. 2023; 23(8):3872. https://doi.org/10.3390/s23083872
Chicago/Turabian StyleKrylov, Artem A., Roman A. Ananiev, Denis V. Chernykh, Dmitry A. Alekseev, Ermolay I. Balikhin, Nikolay N. Dmitrevsky, Mikhail A. Novikov, Elena A. Radiuk, Anna V. Domaniuk, Sergey A. Kovachev, and et al. 2023. "A Complex of Marine Geophysical Methods for Studying Gas Emission Process on the Arctic Shelf" Sensors 23, no. 8: 3872. https://doi.org/10.3390/s23083872