1. Introduction
Navigation system is important for many applications, such as autonomous underwater vehicle (AUV), land vehicles, military systems and so on [
1,
2,
3]. In many navigation systems, the strapdown inertial navigation system has the self-contained properties, and high sampling rates. Thus, SINS was found to be widely used for many applications [
4,
5]. However, the accumulated errors, which is caused by the measured errors of the inertial sensors, will be contained in the SINS outputs. Then, the positioning accuracy of SINS degrades. To address this problem, the SINS-based integrated navigation system was investigated [
6,
7]. Then, the accumulated errors can be corrected by the external measurements. In these integrated navigation systems, the SINS/GPS-integrated system is one of the most popular categories [
8,
9].
Before SINS/GPS works in full accuracy, the initial alignment process must be carried on for SINS. Many researchers were devoted to initial alignment research [
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22]. Firstly, the self-alignment methods in static or swaying base were investigated [
10,
11,
12]. In [
10], the attitude determination method with the Kalman filter was investigated. The convergence rate of the coarse alignment process was improved. In [
11], the alignment errors were analyzed by an analytical calculation method when the SINS was on the stationary base. In [
12], the parameter identification method was proposed for improving the vector observations. The random noises of the inertial sensors were weakened. These methods can be divided into the self-contained alignment process, because the alignment process can be finished only by the inertial sensors. The external equipment was not needed. Moreover, the self-alignment process can obtain the high accuracy during a short time, because the alignment process was not corrupted by the external interferences. However, the self-contained methods cannot be applicable to the in-motion situations, because the vehicle’s motion will interfere the extraction of the Earth gravitational apparent motion. Thus, the applied range of the self-contained alignment methods was limited.
To extend the applied range, the in-motion alignment methods were devised [
13,
14,
15,
16,
17]. In [
13,
14], the in-motion coarse alignment method for SINS/GPS integration was proposed, the detailed deduction of the observation vectors construction was described. With the SINS/GPS integration, the alignment results were high accuracy, which can be found in [
13,
14]. However, the outliers, which are contained in the GPS outputs, were ignored. Thus, the methods could not obtain the high accuracy when there were outliers in the GPS outputs. In [
15], the position loci method was used to implement the in-motion alignment process. Based on the position loci, the outliers of GPS outputs were suppressed and the robustness of the in-motion alignment method was improved. These methods were based on the inertial frame theory. In [
16,
17], the in-motion alignment methods for SINS/DVL (Doppler Velocity Log) and SINS/OD (Odometer) systems were investigated, the alignment principles were also based on the inertial frame theory. Moreover, these in-motion alignment methods used the observation vectors, which were based on the chain rule of the direction cosine matrix (DCM). The alignment process was transformed to the attitude determination problem. However, it is noted that almost all aforementioned in-motion methods, which used the inertial frame theory, used the initial velocity of the vehicle to construct the observed vectors. Additionally, the initial velocity must be obtained from the external equipment since SINS worked in the initial alignment stage. However, the initial velocity errors were not concerned. Thus, there was a flaw in the proposed methods.
In this paper, we design an improved method for in-motion coarse alignment process, where the initial velocity errors are concerned. The intermediate observed vectors are introduced to construct the new observed vectors. Then, according to the vector subtraction operations, the initial velocity errors are eliminated from the new observed vectors. Based on the new observed vectors, the performance of the in-motion coarse alignment method is improved. In this paper, the proposed method is used for the SINS/GPS system. Additionally, we think it can be extended for other integration systems, such as SINS/DVL and SINS/OD integration.
The rest of this paper is organized as follows.
Section 2 explores the related works of the current in-motion coarse alignment for SINS/GPS integration. Then, the existing problems are analyzed. In
Section 3, the construction for the new observation vectors is investigated. The simulation and field tests are designed to verify the performance of the proposed method in
Section 4. Finally, the conclusions are drawn in
Section 5.
3. The New Observation Vectors
According to the GPS measurements, the initial velocity from the GPS outputs can be modelled as:
where
denotes the measured initial velocity from the GPS;
denotes the truth initial velocity;
denotes the initial velocity error. Substituting (7) into (4), we can obtain the calculated observed vector as:
where
denotes the real-time measured velocity from GPS; and
. It is noted that
also contain the noises, but it is not a constant value during the whole alignment process, and it can be suppressed by the robust methods [
22]. In this study, we only focused on the initial velocity errors.
From [
13,
22], the following equation was obtained:
where
Additionally, and are obtained from the gyroscopes and accelerometers. It is noted that the upper tilde means there are errors in and with the inertial sensors.
From (8), using the discrete form of the observation vectors, the averaged observed vectors can be calculated by:
where the subscript
k denotes the vectors at time instant
k; The
M denotes the current time instant
M.
Using (7), the new observed vector can be calculated by the vector subtraction:
Based on (9), it was:
where
From the above deduction, it can be found that the initial velocity errors are eliminated from the new observed vectors . Thus, using the new observed vector , the alignment results will be more accurate than the previous method, which the initial velocity errors are not eliminated. Using the new observation vectors and , the initial attitude can be determined. Then, the initial alignment can be finished with (1).
The algorithm flowchart of the proposed method is summarized in Algorithm 1. From Algorithm 1, it can be divided into three parts. Firstly, the initial parameters are needed to set. The initial parameters contain
K matrix, DCM, and vector observations. Secondly, the outputs of the inertial sensors and the GPS are obtained. Using the outputs information, the alignment process can be carried out. Thirdly, the alignment process is carried out. Additionally, the alignment results are obtained at real-time.
| Algorithm 1. Initial alignment method for SINS/GPS integration |
| Initialization: , |
| Inputs: |
| for: k = 1, 2, 3… do |
| Calculate and using (2) |
| if GPS outputs are available |
| Calculate the observation vectors and by (4) |
| Calculate the averaged observation vector according to (7) |
| |
| Calculate the new observed vector by (8) |
| |
| Calculate the averaged reference vector according to (10) |
| |
| Construct the matrix |
| |
| Extract from KM, and transform to |
| end if |
| Calculate the current attitude according to |
| |
| k = k + 1 |
| end for |
4. Simulation and Field Test Results
To verify the performance of the proposed method, the simulation and field tests were designed in this section. The alignment results are shown in the next two subsections. The current popular methods, which were proposed in [
13,
15], were designed as the comparative methods and four different initial velocity errors are considered.
Scheme 1: The current popular method [
13] with the initial velocity errors [5 5 5] m/s.
Scheme 2: The current popular method [
13] with the initial velocity errors [1 1 1] m/s.
Scheme 3: The current popular method [
13] with the initial velocity errors [0.1 0.1 0.1] m/s.
Scheme 4: The current popular method [
15] with the initial velocity errors [5 5 5] m/s.
Scheme 5: The current popular method [
13] without the initial velocity errors.
Scheme 6: the proposed method with the initial velocity error [5 5 5] m/s.
4.1. Simulation Test
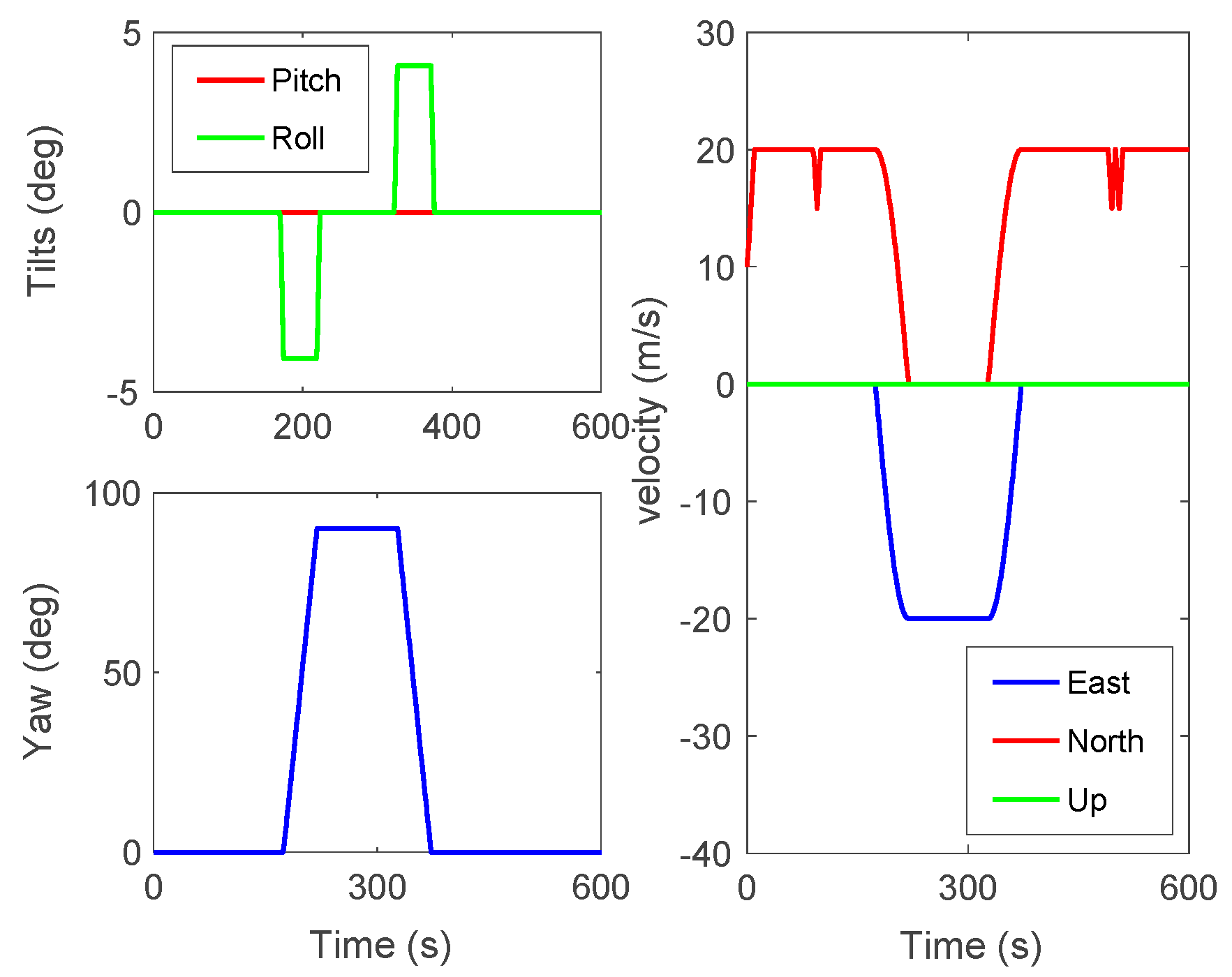
In the simulation tests, the Zigzag trajectory was designed for verification. The trajectory and the movement states of the vehicle are shown in
Figure 1 and
Figure 2. The initial position of the vehicle was set as L = 32° N, λ = 118° E, where L and λ denote the latitude and longitude, respectively.
The bias and the angular rate random walk of the gyroscopes were set as 0.01°/h and 0.005°/√h. The bias and the velocity random walk of the accelerometers were set as 100 μg and 50 μg/√Hz. The sampling rate of inertial sensors was set as 200 Hz. The velocity noise of GPS was set as 0.1 m/s and the position noises of GPS was set as 10 m. The noises of GPS were correspondent to Gaussian distribution. The sampling rate of the GPS was set as 1 Hz.
The alignment results are shown in
Figure 3,
Figure 4 and
Figure 5. In
Figure 3, the pitch errors are presented; it was found that the alignment errors of Schemes 1 and 4 were worse than other schemes. This is because the initial velocity errors in Schemes 1 and 4 were set as [5 5 5] m/s. The alignment errors of Scheme 2 were less than the same one of Schemes 1 and 4. This is because the initial velocity errors of Scheme 2 were set as [1 1 1] m/s. However, with the same initial velocity errors [5 5 5] m/s, the proposed method, which is Scheme 6, can obtain the high accuracy alignment results of the pitch. From
Figure 3, it was found that the alignment errors of the proposed method were around 0.005°. The alignment results were close to Scheme 5, in which the initial velocity errors were not set. Additionally, the alignment results of Scheme 3 were also close to Scheme 5 because the initial velocity was set as [0.1 0.1 0.1] m/s, which is similar to the noises of the GPS outputs. These results showed that the different initial velocity errors will produce different alignment results. The larger initial velocity errors were contained in the GPS outputs and the large alignment errors will be contained in the alignment results of the traditional methods.
In
Figure 4, similar results were found, the roll errors of Scheme 5 were less than 0.005° after 200 s. The roll errors of Scheme 1 and Scheme 4 were larger than 0.1°. Although the alignment errors of Scheme 2 were less than the same one of Scheme 1 and Scheme 4, they were still larger than the proposed method. When alignment process lasts 200 s, compared with the alignment errors of Scheme 3, it was found that the roll errors of Scheme 6, which was the proposed method, were closer to the alignment results of Scheme 5. This conclusion shows that the proposed method could suppress the initial velocity errors effectively. It is noted that the roll errors of Scheme 6 had a similar convergence rate with the errors of Scheme 5. This conclusion showed that the vector subtraction operations did not weaken the characteristics of the vector observations.
In
Figure 5, the yaw errors are shown. From Schemes 1, 2 and 4, it was found that the yaw accuracy was degraded by the initial velocity errors. In Scheme 1, the errors were larger than 5° when the alignment process lasted for 300 s. In Scheme 2, the errors were smaller than the errors of Scheme 1. This is because the initial velocity errors were small in Scheme 2. However, the errors were still larger than the errors of the proposed method. Although the alignment errors of Scheme 3 were less than 0.5°, they were still larger than the alignment errors of Scheme 5, which were not corrupted by the initial velocity errors. At the end of alignment process, the yaw errors were around 0.1° of Schemes 5 and 6. From the enlarged figure in
Figure 5, it was found that the curve of Scheme 6, which was the proposed method, was consistent with the results of Scheme 5. This conclusion showed that the initial velocity errors were eliminated by the proposed method effectively. Moreover, the convergence rate of Scheme 6 was not degraded.
From
Figure 3,
Figure 4 and
Figure 5, it was found that the curves of the alignment errors of Schemes 5 and 6 were coincidental. These results show that the proposed method can eliminate the initial velocity error effectively.
4.2. Field Test
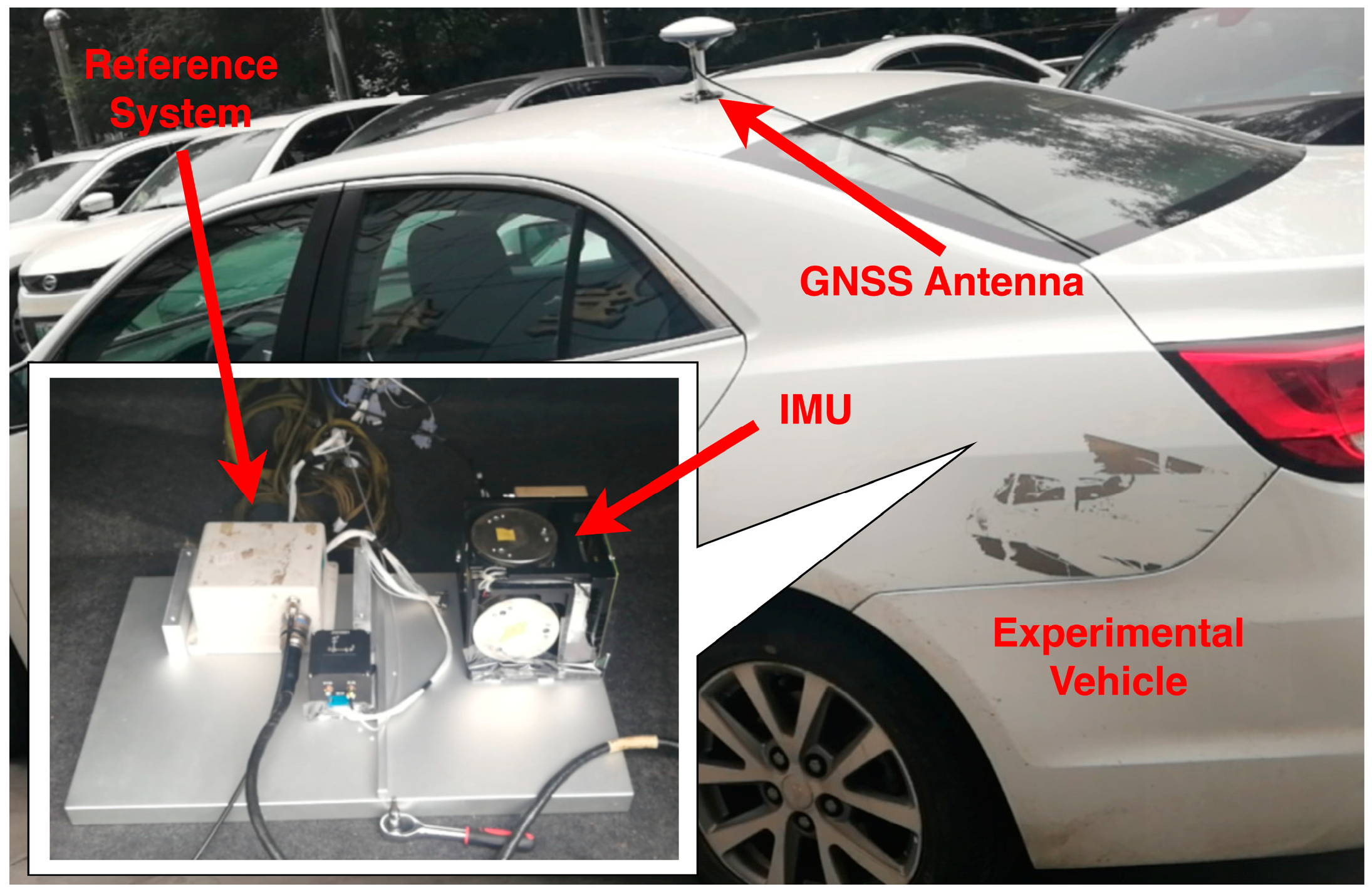
To show the performance of the proposed method in practical systems, the field test was designed. The experimental vehicle and equipment are shown in
Figure 6. The navigational computer was produced by our team. It was combined with a PC104 board. The CPU (central processing unit) can operate up to 500 MHz. The GPS receiver was produced by the NovAtel, the BESTVEL and BESTPOS logs were used to output the velocity and position of the vehicle, the sampling rate of the GPS was set as 1 Hz. The reference system, which is named CPT7, was produced by NovAtel. The accuracies of the pitch, roll and yaw of CPT7 were 0.01°, 0.01° and 0.1°, respectively. The specifications of inertial measurement unit (IMU), which were combined with triaxial accelerometers and gyroscopes, are shown in
Table 1.
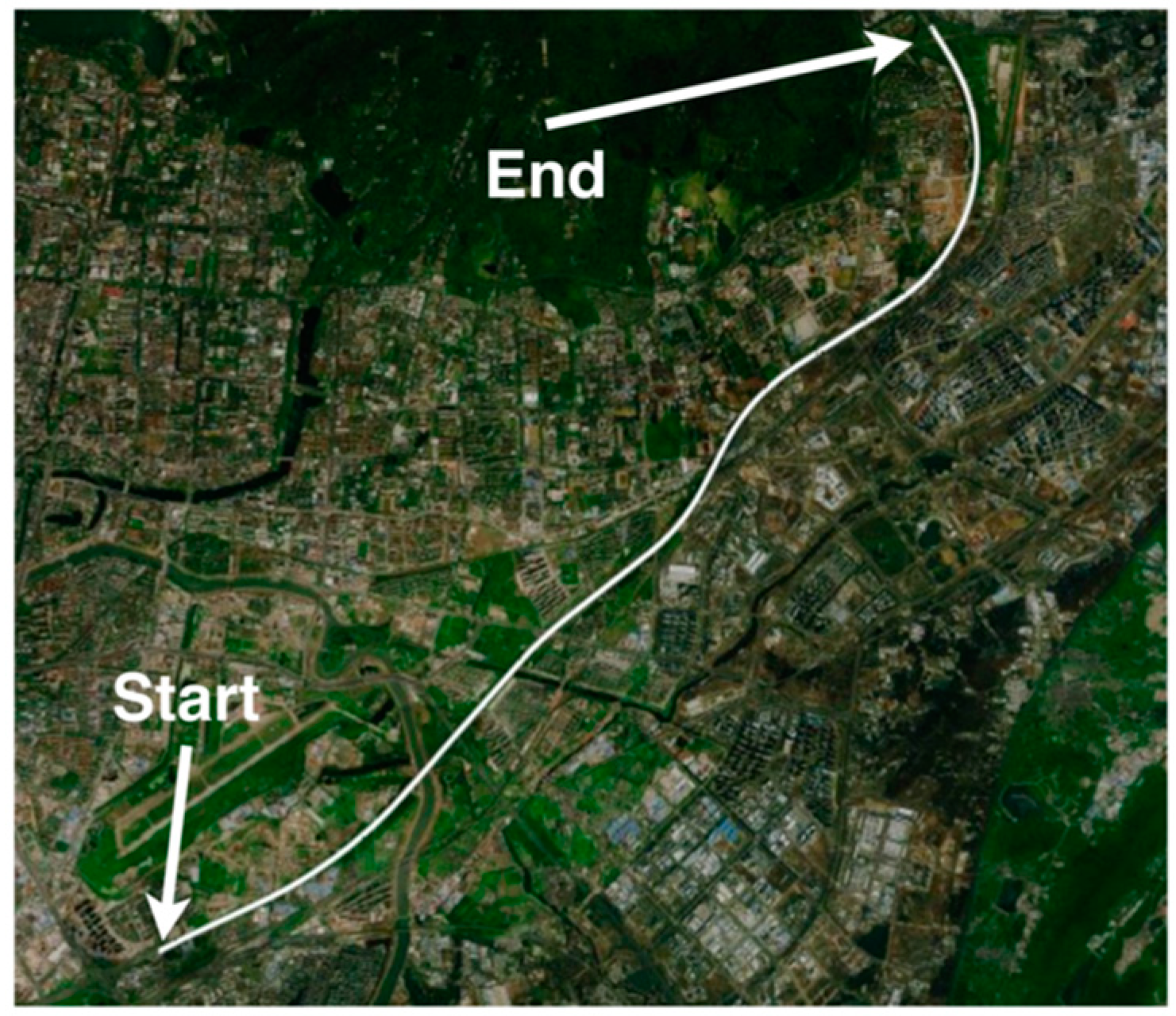
It was found that the specification of the inertial sensors was not a determined value; this is because the errors of the inertial sensors were time-varying. The moving trajectory and the states of the vehicle are shown in
Figure 7 and
Figure 8. The averaged moving velocity was around 20 m/s. Additionally, the alignment process was carried out when the vehicle was moving at any time. The alignment results are shown in
Figure 9,
Figure 10 and
Figure 11.
In
Figure 9, the pitch errors are shown. Due to the big initial velocity errors, it was found that the alignment errors of Schemes 1 and 4 were larger than 0.1°. The results were unsatisfactory. The pitch errors of Scheme 2 were around 0.05° when the alignment time lasted 150 s. However, it was also larger than the proposed method, which was shown as Scheme 6. The errors of Schemes 3, 5 and 6 were closer to each other. In Scheme 3, the initial velocity errors were set as [0.1 0.1 0.1] m/s. Additionally, there were no initial velocity errors in Scheme 5. However, the proposed method, which was Scheme 6, contained the initial velocity errors, which were [5 5 5] m/s. These results showed that the initial velocity errors were suppressed by the proposed method. The alignment errors of pitch of Scheme 6 were less than 0.01°.
In
Figure 10, the roll errors are shown. The errors of Schemes 1 and 4 were also fluctuant. This was because the initial velocity errors were large, and there was no effective method to suppress them. The errors of Schemes 1 and 4 were around 0.1° when the alignment process lasted 300 s. The errors of Scheme 2 were fewer than the errors of Schemes 1 and 4. This was because the initial velocity errors were small. However, they were still worse than the errors of Scheme 6. The errors of Schemes 3, 5 and 6 were similar, i.e., they were less than 0.01°. In Scheme 3, the initial velocity errors were 0.1 m/s. Additionally, in Scheme 5, the initial velocity errors were 0 m/s. However, in Scheme 6, which was the proposed method, the initial velocity errors were 5 m/s. Compared with the results of Schemes 3 and 5, it was found that the large initial velocity errors in Scheme 6 were suppressed.
In
Figure 11, the yaw errors are shown. The errors of Schemes 1 and 4 were large and were caused by the relatively large initial velocity errors. Moreover, the alignment errors of Scheme 2 were larger than 2° when the alignment time lasted 300 s. The other three methods, which were Schemes 3, 5 and 6, had the similar alignment results. However, it is noted that the initial velocity errors in Schemes 3 and 5 were small. Moreover, the alignment errors of Scheme 6 were closer to Scheme 5 than Scheme 3. It was shown that although the yaw errors of Scheme 3 could converge towards less than 0.5°, they were also affected by the initial velocity errors. Thus, the alignment errors were a little bigger than the proposed method. After 300 s, the yaw errors of Scheme 6 were less than 0.2°, and 5 m/s initial velocity errors were contained in Scheme 6. The field test also verified the performance of the proposed method.
5. Conclusions
In this paper, an improved method for in-motion coarse alignment process of SINS/GPS integration was proposed. The initial velocity errors, which were contained in the observed vectors, were considered. If the initial velocity errors were contained in the observed vectors, the alignment error would have been large. To address this problem, the average operation was used to construct the intermediate observed vectors. Then, the new observed vectors were constructed by the intermediate observed vectors with the vector subtraction operations. In the new observed vectors, the initial velocity errors were eliminated effectively. Thus, the alignment accuracy was improved. Moreover, the characteristics of the vector observations were reserved. The simulation and field tests were designed to verify the performance of the proposed method. The results showed that the proposed method could suppress the influences of initial velocity errors on the initial alignment procedure. The proposed method can also be used in other in-motion coarse alignment processes.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}