
Recognition Performance Analysis of a Multimodal Biometric System Based on the Fusion of 3D Ultrasound Hand-Geometry and Palmprint

Abstract
:1. Introduction
2. Related Works
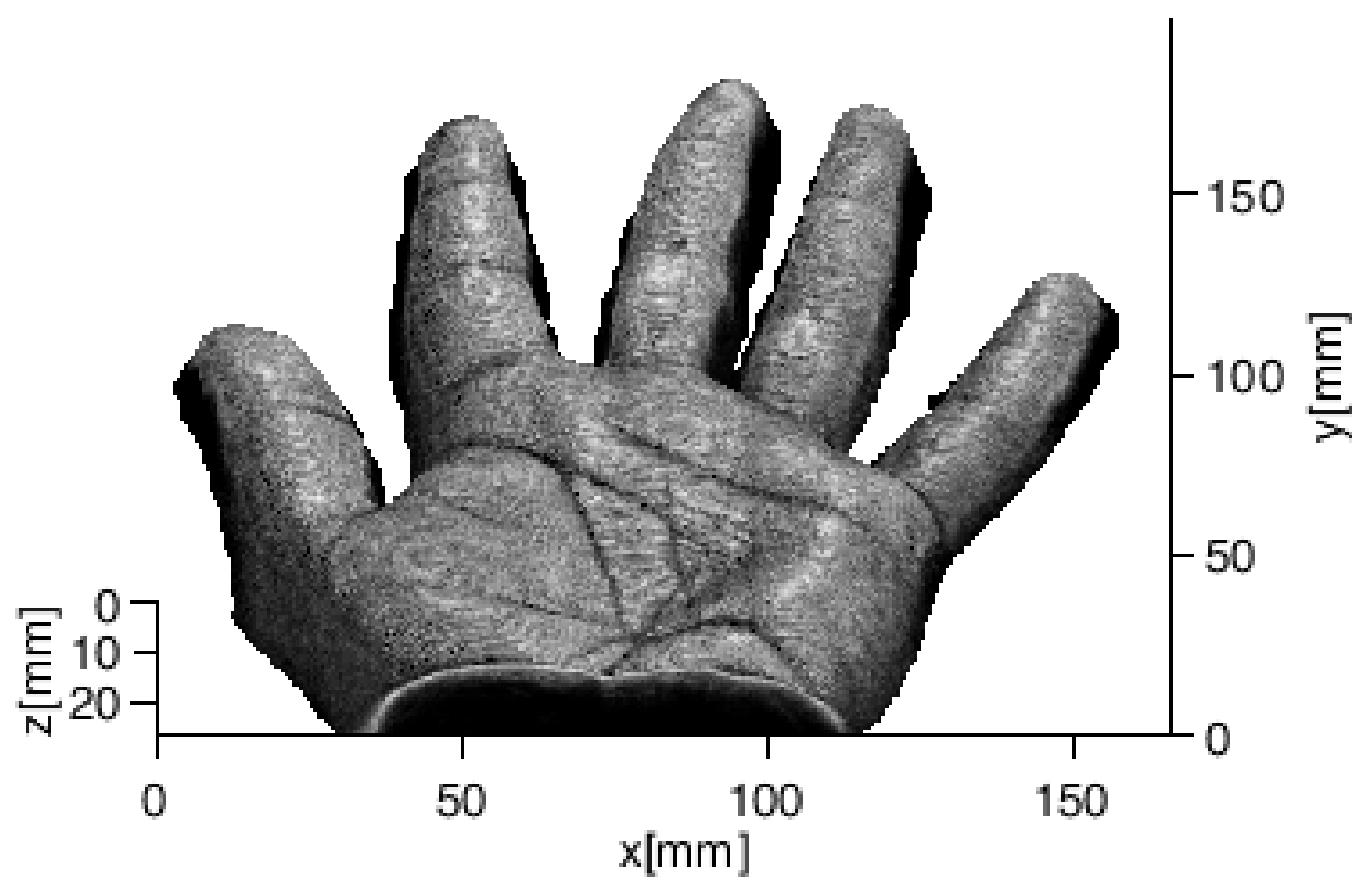
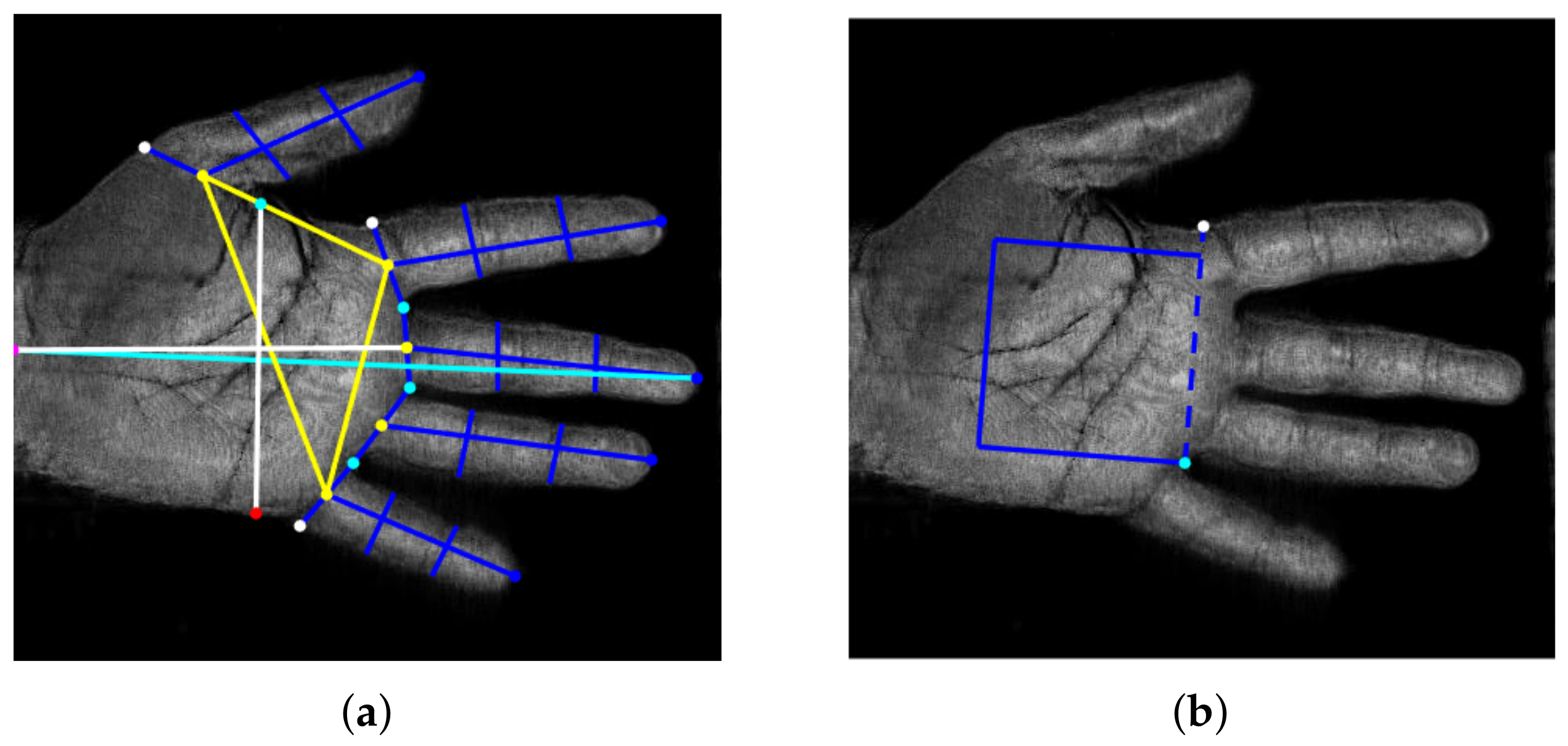
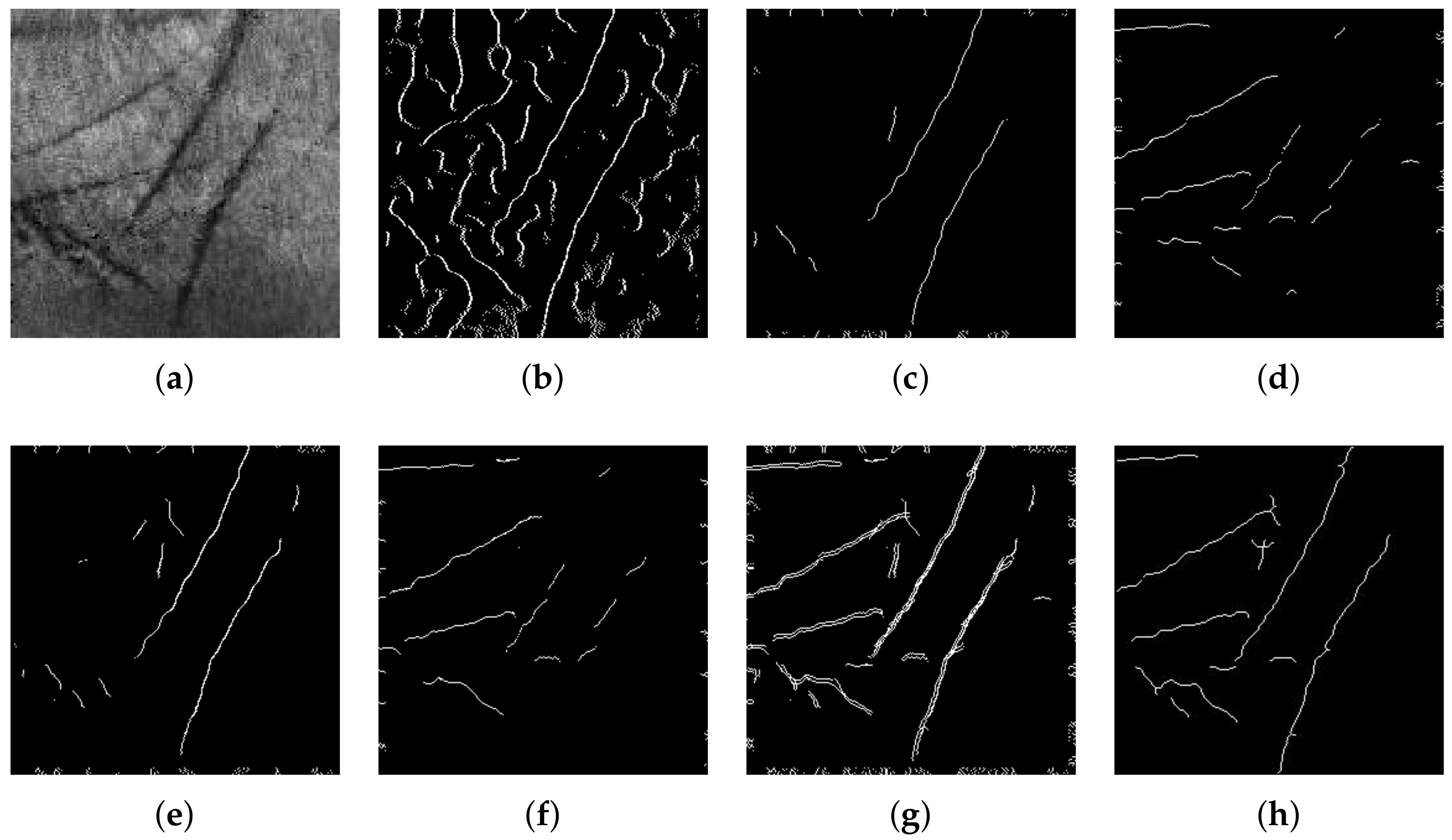
3. Image Acquisition and Feature Extraction
- Mean features (MF): each length computed as the mean value of the lengths obtained at each depth;
- Weighted Mean features (WMF): each length represented by a weighted mean of the lengths obtained at various depths;
- Global features (GF): all lengths computed at every depth.
4. Fusion
Experimented Weighted Score Sum Rules
5. Results
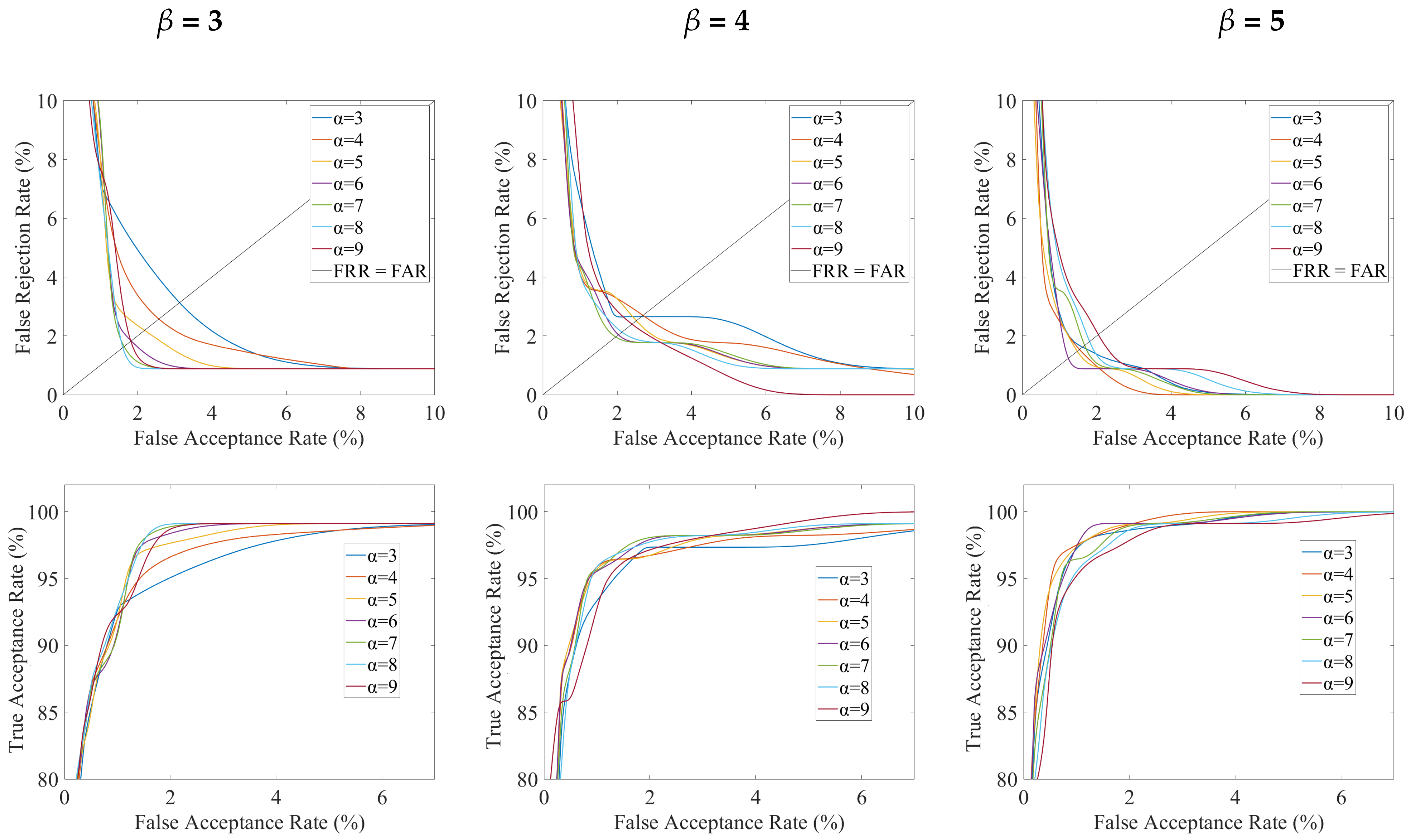
5.1. Verification
5.2. Identification
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, Y.; Shi, D.; Zhou, W. Convolutional Neural Network Approach Based on Multimodal Biometric System with Fusion of Face and Finger Vein Features. Sensors 2022, 22, 6039. [Google Scholar] [CrossRef] [PubMed]
- Ryu, R.; Yeom, S.; Kim, S.H.; Herbert, D. Continuous Multimodal Biometric Authentication Schemes: A Systematic Review. IEEE Access 2021, 9, 34541–34557. [Google Scholar] [CrossRef]
- Haider, S.; Rehman, Y.; Usman Ali, S. Enhanced multimodal biometric recognition based upon intrinsic hand biometrics. Electronics 2020, 9, 1916. [Google Scholar] [CrossRef]
- Bhilare, S.; Jaswal, G.; Kanhangad, V.; Nigam, A. Single-sensor hand-vein multimodal biometric recognition using multiscale deep pyramidal approach. Mach. Vis. Appl. 2018, 29, 1269–1286. [Google Scholar] [CrossRef]
- Kumar, A.; Zhang, D. Personal recognition using hand shape and texture. IEEE Trans. Image Process. 2006, 15, 2454–2461. [Google Scholar] [CrossRef] [Green Version]
- Charfi, N.; Trichili, H.; Alimi, A.; Solaiman, B. Bimodal biometric system for hand shape and palmprint recognition based on SIFT sparse representation. Multimed. Tools Appl. 2017, 76, 20457–20482. [Google Scholar] [CrossRef]
- Gupta, P.; Srivastava, S.; Gupta, P. An accurate infrared hand geometry and vein pattern based authentication system. Knowl. Based Syst. 2016, 103, 143–155. [Google Scholar] [CrossRef]
- Kanhangad, V.; Kumar, A.; Zhang, D. Contactless and pose invariant biometric identification using hand surface. IEEE Trans. Image Process. 2011, 20, 1415–1424. [Google Scholar] [CrossRef]
- Kumar, A. Toward More Accurate Matching of Contactless Palmprint Images under Less Constrained Environments. IEEE Trans. Inf. Forensics Secur. 2019, 14, 34–47. [Google Scholar] [CrossRef]
- Liang, X.; Li, Z.; Fan, D.; Zhang, B.; Lu, G.; Zhang, D. Innovative Contactless Palmprint Recognition System Based on Dual-Camera Alignment. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 6464–6476. [Google Scholar] [CrossRef]
- Wu, W.; Elliott, S.; Lin, S.; Sun, S.; Tang, Y. Review of palm vein recognition. IET Biom. 2020, 9, 1–10. [Google Scholar] [CrossRef]
- Palma, D.; Blanchini, F.; Giordano, G.; Montessoro, P.L. A Dynamic Biometric Authentication Algorithm for Near-Infrared Palm Vascular Patterns. IEEE Access 2020, 8, 118978–118988. [Google Scholar] [CrossRef]
- Wang, R.; Müller, R. Bioinspired solution to finding passageways in foliage with sonar. Bioinspir. Biomim. 2021, 16, 066022. [Google Scholar] [CrossRef]
- Iula, A.; Bollino, G. A travelling wave rotary motor driven by three pairs of langevin transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2012, 59, 121–127. [Google Scholar] [CrossRef]
- Pyle, R.; Bevan, R.; Hughes, R.; Rachev, R.; Ali, A.; Wilcox, P. Deep Learning for Ultrasonic Crack Characterization in NDE. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2021, 68, 1854–1865. [Google Scholar] [CrossRef]
- Carotenuto, R.; Merenda, M.; Iero, D.; Della Corte, F. An Indoor Ultrasonic System for Autonomous 3-D Positioning. IEEE Trans. Instrum. Meas. 2019, 68, 2507–2518. [Google Scholar] [CrossRef]
- Avola, D.; Cinque, L.; Fagioli, A.; Foresti, G.; Mecca, A. Ultrasound Medical Imaging Techniques. ACM Comput. Surv. 2021, 54. [Google Scholar] [CrossRef]
- Trimboli, P.; Bini, F.; Marinozzi, F.; Baek, J.H.; Giovanella, L. High-intensity focused ultrasound (HIFU) therapy for benign thyroid nodules without anesthesia or sedation. Endocrine 2018, 61, 210–215. [Google Scholar] [CrossRef]
- Iula, A. Ultrasound systems for biometric recognition. Sensors 2019, 19, 2317. [Google Scholar] [CrossRef] [Green Version]
- Schmitt, R.; Zeichman, J.; Casanova, A.; Delong, D. Model based development of a commercial, acoustic fingerprint sensor. In Proceedings of the IEEE International Ultrasonics Symposium, IUS, Dresden, Germany, 7–10 October 2012; pp. 1075–1085. [Google Scholar]
- Lamberti, N.; Caliano, G.; Iula, A.; Savoia, A. A high frequency cMUT probe for ultrasound imaging of fingerprints. Sens. Actuator A Phys. 2011, 172, 561–569. [Google Scholar] [CrossRef]
- Jiang, X.; Tang, H.Y.; Lu, Y.; Ng, E.J.; Tsai, J.M.; Boser, B.E.; Horsley, D.A. Ultrasonic fingerprint sensor with transmit beamforming based on a PMUT array bonded to CMOS circuitry. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2017, 64, 1401–1408. [Google Scholar] [CrossRef] [PubMed]
- Iula, A.; Hine, G.; Ramalli, A.; Guidi, F. An Improved Ultrasound System for Biometric Recognition Based on Hand Geometry and Palmprint. Procedia Eng. 2014, 87, 1338–1341. [Google Scholar] [CrossRef] [Green Version]
- Iula, A. Biometric recognition through 3D ultrasound hand geometry. Ultrasonics 2021, 111, 106326. [Google Scholar] [CrossRef] [PubMed]
- Iula, A.; Nardiello, D. Three-dimensional ultrasound palmprint recognition using curvature methods. J. Electron. Imaging 2016, 25, 033009. [Google Scholar] [CrossRef]
- Nardiello, D.; Iula, A. A new recognition procedure for palmprint features extraction from ultrasound images. Lect. Notes Electr. Eng. 2019, 512, 113–118. [Google Scholar]
- Iula, A.; Nardiello, D. 3-D Ultrasound Palmprint Recognition System Based on Principal Lines Extracted at Several under Skin Depths. IEEE Trans. Instrum. Meas. 2019, 68, 4653–4662. [Google Scholar] [CrossRef]
- De Santis, M.; Agnelli, S.; Nardiello, D.; Iula, A. 3D Ultrasound Palm Vein recognition through the centroid method for biometric purposes. In Proceedings of the 2017 IEEE International Ultrasonics Symposium (IUS), Washington, DC, USA, 6–9 September 2017. [Google Scholar]
- Iula, A.; Vizzuso, A. 3D Vascular Pattern Extraction from Grayscale Volumetric Ultrasound Images for Biometric Recognition Purposes. Appl. Sci. 2022, 12, 8285. [Google Scholar] [CrossRef]
- Micucci, M.; Iula, A. Ultrasound wrist vein pattern for biometric recognition. In Proceedings of the 2022 IEEE International Ultrasonics Symposium, IUS, Venice, Italy, 10–13 October 2022; Volume 2022. [Google Scholar]
- Iula, A. Micucci, M. Multimodal Biometric Recognition Based on 3D Ultrasound Palmprint-Hand Geometry Fusion. IEEE Access 2022, 10, 7914–7925. [Google Scholar] [CrossRef]
- Chen, S.; Guo, Z.; Feng, J.; Zhou, J. An Improved Contact-Based High-Resolution Palmprint Image Acquisition System. IEEE Trans. Instrum. Meas. 2020, 69, 6816–6827. [Google Scholar] [CrossRef]
- Palma, D.; Montessoro, P.; Giordano, G.; Blanchini, F. Biometric Palmprint Verification: A Dynamical System Approach. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 2676–2687. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Li, H.; Niu, J. Fragile Bits in Palmprint Recognition. IEEE Signal Process. Lett. 2012, 19, 663–666. [Google Scholar] [CrossRef] [Green Version]
- Fei, L.; Lu, G.; Jia, W.; Teng, S.; Zhang, D. Feature extraction methods for palmprint recognition: A survey and evaluation. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 346–363. [Google Scholar] [CrossRef]
- Genovese, A.; Piuri, V.; Plataniotis, K.N.; Scotti, F. PalmNet: Gabor-PCA convolutional networks for touchless palmprint recognition. IEEE Trans. Inf. Forensics Secur. 2019, 14, 3160–3174. [Google Scholar] [CrossRef] [Green Version]
- Zhong, D.; Zhu, J. Centralized Large Margin Cosine Loss for Open-Set Deep Palmprint Recognition. IEEE Trans. Circuits Syst. Video Technol. 2020, 30, 1559–1568. [Google Scholar] [CrossRef]
- Shao, H.; Zhong, D.; Du, X. Deep Distillation Hashing for Unconstrained Palmprint Recognition. IEEE Trans. Instrum. Meas. 2021, 70. [Google Scholar] [CrossRef]
- Fei, L.; Zhang, B.; Jia, W.; Wen, J.; Zhang, D. Feature Extraction for 3-D Palmprint Recognition: A Survey. IEEE Trans. Instrum. Meas. 2020, 69, 645–656. [Google Scholar] [CrossRef]
- Sharma, S.; Dubey, S.; Singh, S.; Saxena, R.; Singh, R. Identity verification using shape and geometry of human hands. Expert Syst. Appl. 2015, 42, 821–832. [Google Scholar] [CrossRef]
- Klonowski, M.; Plata, M.; Syga, P. User authorization based on hand geometry without special equipment. Pattern Recognit. 2018, 73, 189–201. [Google Scholar] [CrossRef]
- Iula, A.; Savoia, A.; Caliano, G. Capacitive micro-fabricated ultrasonic transducers for biometric applications. Microelectron. Eng. 2011, 88, 2278–2280. [Google Scholar] [CrossRef]
- Iula, A.; Savoia, A.S.; Caliano, G. An ultrasound technique for 3D palmprint extraction. Sens. Actuator A Phys. 2014, 212, 18–24. [Google Scholar] [CrossRef]
- Iula, A.; Hine, G.E.; Ramalli, A.; Guidi, F.; Boni, E.; Savoia, A.S.; Caliano, G. An enhanced ultrasound technique for 3D palmprint recognition. In Proceedings of the 2013 IEEE International Ultrasonics Symposium (IUS), Prague, Czech Republic, 21–25 July 2013; pp. 978–981. [Google Scholar]
- Aldjia, B.; Leila, B. Sensor Level Fusion for Multi-modal Biometric Identification using Deep Learning. In Proceedings of the 2021 IEEE International Conference on Recent Advances in Mathematics and Informatics, ICRAMI 2021, Tebessa, Algeria, 21–22 September 2021. [Google Scholar]
- Safavipour, M.; Doostari, M.; Sadjedi, H. A hybrid approach to multimodal biometric recognition based on feature-level fusion of face, two irises, and both thumbprints. J. Med. Signals Sens. 2022, 12, 177–191. [Google Scholar] [PubMed]
- Hanmandlu, M.; Grover, J.; Gureja, A.; Gupta, H.M. Score level fusion of multimodal biometrics using triangular norms. Pattern Recognit. Lett. 2011, 32, 1843–1850. [Google Scholar] [CrossRef]
- Punyani, P.; Gupta, R.; Kumar, A. A multimodal biometric system using match score and decision level fusion. Int. J. Inf. Technol. 2022, 14, 725–730. [Google Scholar] [CrossRef]
- Devi, D.; Rao, K. Decision level fusion schemes for a Multimodal Biometric System using local and global wavelet features. In Proceedings of the CONECCT 2020-6th IEEE International Conference on Electronics, Computing and Communication Technologies, Bangalore, India, 2–4 July 2020. [Google Scholar]
- Dwivedi, R.; Dey, S. Score-level fusion for cancelable multi-biometric verification. Pattern Recognit. Lett. 2019, 126, 58–67. [Google Scholar] [CrossRef]
- Peng, J.; El-Latif, A.; Li, Q.; Niu, X. Multimodal biometric authentication based on score level fusion of finger biometrics. Optik 2014, 125, 6891–6897. [Google Scholar] [CrossRef]
- El-Latif, A.; Hossain, M.; Wang, N. Score level multibiometrics fusion approach for healthcare. Clust. Comput. 2019, 22, 2425–2436. [Google Scholar] [CrossRef]
- Zhang, D.; Lu, G.; Li, W.; Zhang, L.; Luo, N. Palmprint recognition using 3-D information. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2009, 39, 505–519. [Google Scholar] [CrossRef] [Green Version]
- Damer, N.; Opel, A.; Nouak, A. Biometric source weighting in multi-biometric fusion: Towards a generalized and robust solution. In Proceedings of the European Signal Processing Conference, Lisbon, Portugal, 1–5 September 2014; pp. 1382–1386. [Google Scholar]
- Kabir, W.; Ahmad, M.; Swamy, M. Normalization and weighting techniques based on genuine-impostor score fusion in multi-biometric systems. IEEE Trans. Inf. Forensics Secur. 2018, 13, 1989–2000. [Google Scholar] [CrossRef]
- Poh, N.; Bengio, S. A study of the effects of score normalisation prior to fusion in biometric authentication tasks. Technical Report, IDIAP 2004. Available online: https://infoscience.epfl.ch/record/83130 (accessed on 14 February 2023).
- Snelick, R.; Uludag, U.; Mink, A.; Indovina, M.; Jain, A. Large-scale evaluation of multimodal biometric authentication using state-of-the-art systems. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 450–455. [Google Scholar] [CrossRef]
- Tortoli, P.; Bassi, L.; Boni, E.; Dallai, A.; Guidi, F.; Ricci, S. ULA-OP: An advanced open platform for ultrasound research. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2009, 56, 2207–2216. [Google Scholar] [CrossRef]
- Iula, A.; Micucci, M. A Feasible 3D Ultrasound Palmprint Recognition System for Secure Access Control Applications. IEEE Access 2021, 9, 39746–39756. [Google Scholar] [CrossRef]
- Iula, A.; Micucci, M. Experimental validation of a reliable palmprint recognition system based on 2D ultrasound images. Electronics 2019, 8, 1393. [Google Scholar] [CrossRef] [Green Version]
- Micucci, M.; Iula, A. Recent Advances in Machine Learning Applied to Ultrasound Imaging. Electronics 2022, 11, 1800. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | EER | AUC | EER | AUC | EER | AUC |
|---|---|---|---|---|---|---|
| 3.08% | 99.35% | 2.00% | 99.61% | 1.60% | 99.85% | |
| 2.55% | 99.43% | 2.75% | 99.69% | 1.54% | 99.88% | |
| 2.13% | 99.50% | 2.53% | 99.71% | 1.48% | 99.88% | |
| 1.82% | 99.53% | 1.93% | 99.70% | 1.18% | 99.87% | |
| 1.59% | 99.53% | 1.91% | 99.69% | 1.64% | 99.84% | |
| 1.54% | 99.50% | 2.08% | 99.67% | 1.78% | 99.82% | |
| 1.75% | 99.55% | 2.49% | 99.77% | 2.04% | 99.79% | |
| Method | EER | AUC |
|---|---|---|
| GF | 0.64% | 99.94% |
| MF | 0.74% | 99.94% |
| WMF | 0.93% | 99.94% |
| ERRW | D-Prime | FDRW | MEW | Kabir | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Method | EER | AUC | EER | AUC | EER | AUC | EER | AUC | EER | AUC |
| 0.22% | 99.99% | 0.90% | 99.98% | 0.89% | 99.98% | 0.20% | 99.99% | 0.24% | 99.99% | |
| 0.24% | 99.99% | 0.88% | 99.98% | 0.90% | 99.97% | 0.26% | 99.99% | 0.28% | 99.99% | |
| 0.28% | 99.99% | 0.86% | 99.98% | 0.90% | 99.97% | 0.33% | 99.99% | 0.38% | 99.99% | |
| 0.30% | 99.99% | 0.90% | 99.98% | 0.90% | 99.96% | 0.22% | 100% | 0.37% | 100% | |
| 0.33% | 99.99% | 0.88% | 99.98% | 0.89% | 99.96% | 0.23% | 100% | 0.36% | 100% | |
| 0.32% | 99.99% | 0.90% | 99.97% | 0.80% | 99.97% | 0.24% | 100% | 0.37% | 100% | |
| 0.34% | 100% | 0.90% | 99.98% | 0.90% | 99.96% | 0.33% | 99.99% | 0.63% | 99.99% | |
| ERRW | D-Prime | FDRW | MEW | Kabir | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Method | EER | AUC | EER | AUC | EER | AUC | EER | AUC | EER | AUC |
| 0.21% | 99.99% | 0.55% | 99.99% | 0.81% | 99.99% | 0.25% | 99.98% | 0.14% | 99.99% | |
| 0.16% | 99.99% | 0.52% | 99.99% | 0.85% | 99.99% | 0.21% | 99.99% | 0.18% | 100% | |
| 0.16% | 99.99% | 0.68% | 99.99% | 0.86% | 99.99% | 0.16% | 99.99% | 0.16% | 100% | |
| 0.14% | 100% | 0.63% | 99.99% | 0.90% | 99.98% | 0.094% | 99.99% | 0.90% | 100% | |
| 0.47% | 99.99% | 0.47% | 99.99% | 0.65% | 99.99% | 0.47% | 100% | 0.20% | 100% | |
| 0.15% | 100% | 0.75% | 99.99% | 0.90% | 99.99% | 0.14% | 100% | 0.21% | 100% | |
| 0.16% | 100% | 0.074% | 100% | 0.15% | 100% | 0.15% | 100% | 0.14% | 100% | |
| ERRW | D-Prime | FDRW | MEW | Kabir | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Method | EER | AUC | EER | AUC | EER | AUC | EER | AUC | EER | AUC |
| 0.14% | 100% | 0.20% | 100% | 0.14% | 100% | 0.27% | 100% | 0.33% | 100% | |
| 0.063% | 100% | 0.12% | 100% | 0.29% | 100% | 0.18% | 100% | 0.058% | 100% | |
| 0.063% | 100% | 0.22% | 100% | 0.28% | 99.99% | 0.12% | 99.99% | 0.062% | 100% | |
| 0.081% | 100% | 0.22% | 100% | 0.24% | 99.99% | 0.41% | 99.99% | 0.098% | 100% | |
| 0.15% | 100% | 0.20% | 100% | 0.30% | 99.99% | 0.15% | 100% | 0.1% | 100% | |
| 0.13% | 100% | 0.23% | 100% | 0.27% | 100% | 0.15% | 100% | 0.06% | 100% | |
| 0.15% | 100% | 0.24% | 100% | 0.29% | 99.99% | 0.083% | 100% | 0.088% | 100% | |
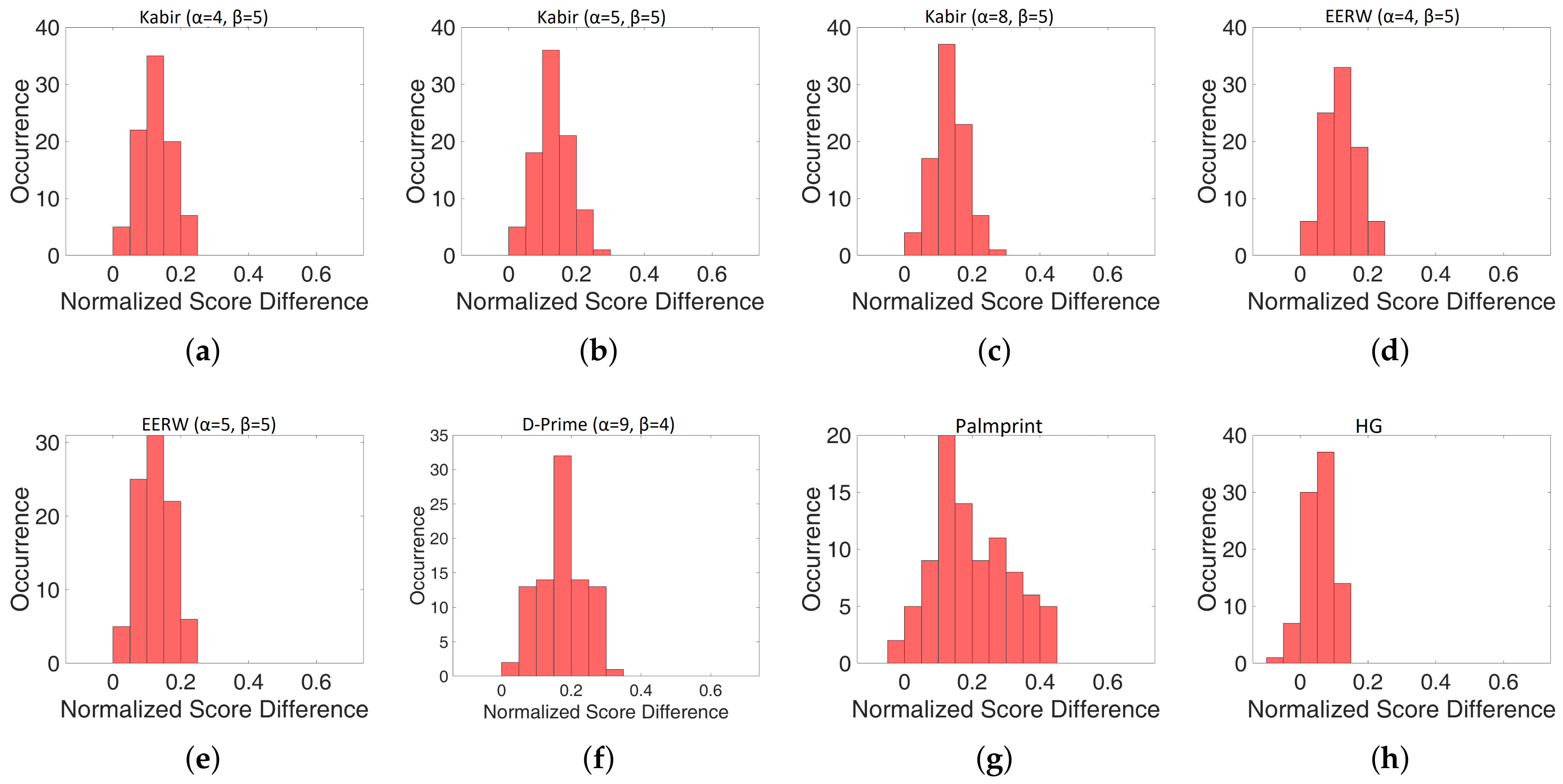
| Method | Mean | Standard | NSD < 0.1 |
|---|---|---|---|
| Deviation | |||
| Kabir ( = 4, = 5) | 0.1255 | 0.0498 | 27 |
| Kabir ( = 5, = 5) | 0.1313 | 0.0501 | 23 |
| Kabir ( = 8, = 5) | 0.1328 | 0.0503 | 21 |
| D-Prime ( = 7, = 4) | 0.1785 | 0.0655 | 15 |
| EERW ( = 4, = 5) | 0.1209 | 0.0488 | 31 |
| EERW ( = 5, = 5) | 0.1247 | 0.0487 | 30 |
| HG | 0.0585 | 0.0423 | |
| Palmprint | 0.2085 | 0.1251 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Micucci, M.; Iula, A. Recognition Performance Analysis of a Multimodal Biometric System Based on the Fusion of 3D Ultrasound Hand-Geometry and Palmprint. Sensors 2023, 23, 3653. https://doi.org/10.3390/s23073653
Micucci M, Iula A. Recognition Performance Analysis of a Multimodal Biometric System Based on the Fusion of 3D Ultrasound Hand-Geometry and Palmprint. Sensors. 2023; 23(7):3653. https://doi.org/10.3390/s23073653
Chicago/Turabian StyleMicucci, Monica, and Antonio Iula. 2023. "Recognition Performance Analysis of a Multimodal Biometric System Based on the Fusion of 3D Ultrasound Hand-Geometry and Palmprint" Sensors 23, no. 7: 3653. https://doi.org/10.3390/s23073653