1. Introduction
Wildfires significantly impact air quality on local, regional and even continental scales and may play an interactive role in climate change through emissions and changes in carbon sequestration and storage [
1,
2]. Since the mid-1980s, the typical annual wildfire area across the western United States has doubled, attributed in part to increased temperatures and decreased moisture due to climate change [
3,
4]. The climate trend in the western U.S. toward warmer and drier conditions is projected to continue [
5]. This trend, combined with the accumulated combustible biomass due to fire-control practices over the past century, suggests that the frequency and scale of wildfires will continue to increase in coming decades, with negative impacts on air quality and health. Similar trends have occurred and are predicted to continue for other fire-prone temperate and boreal regions globally [
6,
7,
8,
9].
Satellite measurements of wildfires are used extensively for fire detection and monitoring. Fire radiative power (FRP), a measure of fire intensity, is derived from wavelength bands near 4 µm from MODIS (Moderate Resolution Imaging Spectroradiometer) instruments on the NASA Terra and Aqua satellites and VIIRS (Visible Infrared Imaging Radiometer Suite) instruments on NOAA satellites [
10,
11]. As an indication of fire intensity, FRP is used as a model input for fire smoke forecasting (e.g., [
12]). The spatial resolutions of these satellite instruments are typically several hundred meters. Even though wildfires may burn extensive areas over their lifetimes, active fire areas at any given time are frequently substantially smaller than MODIS (1 km) and VIIRS (375 m) pixel sizes. Therefore, the FRP as seen by individual satellite pixels is typically an average of the active fire and surrounding (much cooler) areas. As a result, FRP measurements from these instruments may not have a direct and monotonic relationship with actual FRP of the flaming regions that are related to emissions and dynamics. FRP measurements at higher spatial resolutions are available from airborne instruments such as the Enhanced MODIS Airborne Simulator (eMAS; ref. [
13]) and the MODIS/ASTER Airborne Simulator (MASTER; ref. [
14]). Size and weight limit the use of these instruments to larger research aircraft such as King Air B200s and the NASA ER-2 and DC-8.
Uncrewed aerial systems (UASs) have the potential to serve as ideal platforms for wildfire measurements to augment satellite observations with higher resolution data. With no human onboard, they remove the aircrew safety issue associated with operating crewed aircraft in hazardous environments and provide a capability for high resolution measurements in the near-fire environment. There have been a number of demonstrations of small and medium-sized UAS applications for wildfire reconnaissance over the past several years (e.g., [
15,
16]). These demonstrations have shown that UAS observations can indeed provide useful information for wildfire incident response efforts by accurately detecting fire perimeter and identifying fire hotspots, but there have so far been no attempts to make measurements relevant to studying fire emission behavior or to use the observations as input for fire weather forecast models. A recent review of early forest fire detection approaches, including UAS-based systems, is presented by Barmpoutis et al. [
17].
A wildfire’s intensity and emissions depend on a number of factors, including terrain, fuel type, fuel moisture and meteorological conditions. The interaction with local meteorology (winds, temperature and humidity) means that fire emissions typically exhibit a significant diurnal cycle [
18]. Fire plumes tend to be more concentrated at night due to reduced mixing and lower boundary layer heights, which degrades air quality leading to higher pollution exposures relative to daytime in areas directly downwind of fires. Differences in winds and surface heating between day and night lead to differences in the rate and direction of fire spread. Manned research aircraft flights are mostly restricted to daytime operations due to potential dangers associated with nighttime operations. This limitation leaves a large data gap in observations of fire perimeter, fire intensity, fire emissions, plume distribution and meteorological data that a capable UAS observation system could fill, allowing for improvements in fire classification [
19] and fire weather forecasting as well as providing updated information to local incident management teams (IMT) coordinating fire response efforts.
Recognizing the potential utility of small UASs for wildfire measurements, the National Oceanic and Atmospheric Administration (NOAA) Uncrewed Systems Research Transition Office, formerly known as the NOAA UAS Program Office, funded the Nighttime Fire Observations eXperiment (NightFOX) project to develop and deploy lightweight, low power UAS payload instrument suites for remote sensing of wildfire properties and for in situ smoke plume characterization. Here we present a novel wildfire remote sensing instrument suite developed as part of the NightFOX project. The payload was originally designed for high spatial resolution FRP measurement and fire perimeter mapping (
Section 2) while operated onboard a small fixed-wing UAS, but is easily adaptable for measurement from a variety of platforms such as crewed aircraft or rotary-wing UAS. Results from deployments of this sensor suite on a crewed aircraft and a fixed-wing UAS are presented in
Section 3.
2. Materials and Methods
2.1. General System Design Considerations
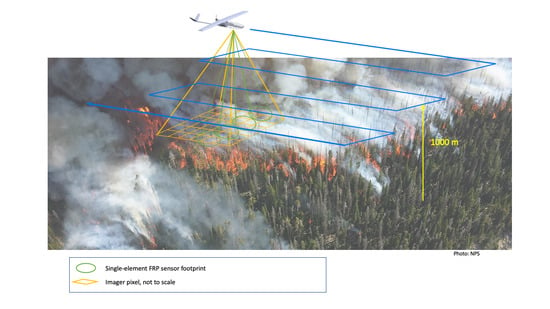
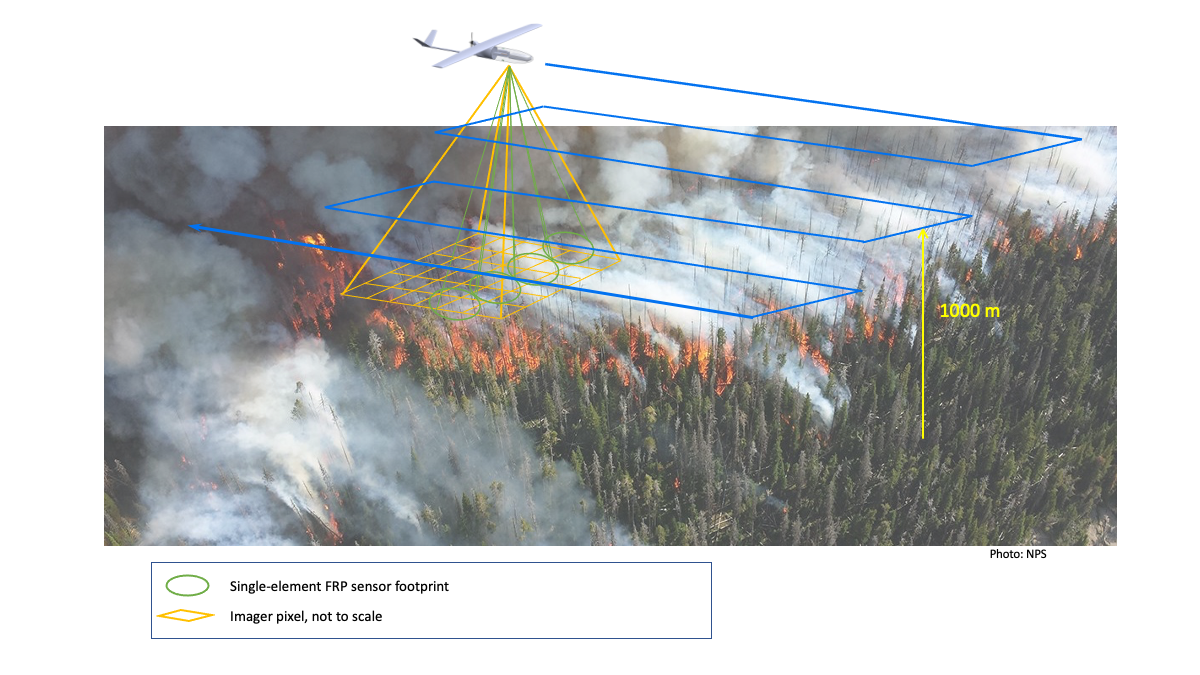
While the NightFOX remote sensing instrument suite has been successfully adapted for use on manned aircraft, its initial design for use on a small UAS required that the system be compact, lightweight, relatively inexpensive and have a power consumption low enough that a small rechargeable battery pack could be used to power the payload for several hours of continuous operation. The system described here has been designated as the Airborne Wildfire Spectral Mapper (AWSM). The AWSM system sensors were designed to produce continuous spatial coverage for fire mapping and FRP measurement when operated at an altitude of 1000 m above ground at flight speeds less than 20 m s−1.
2.2. System Configuration
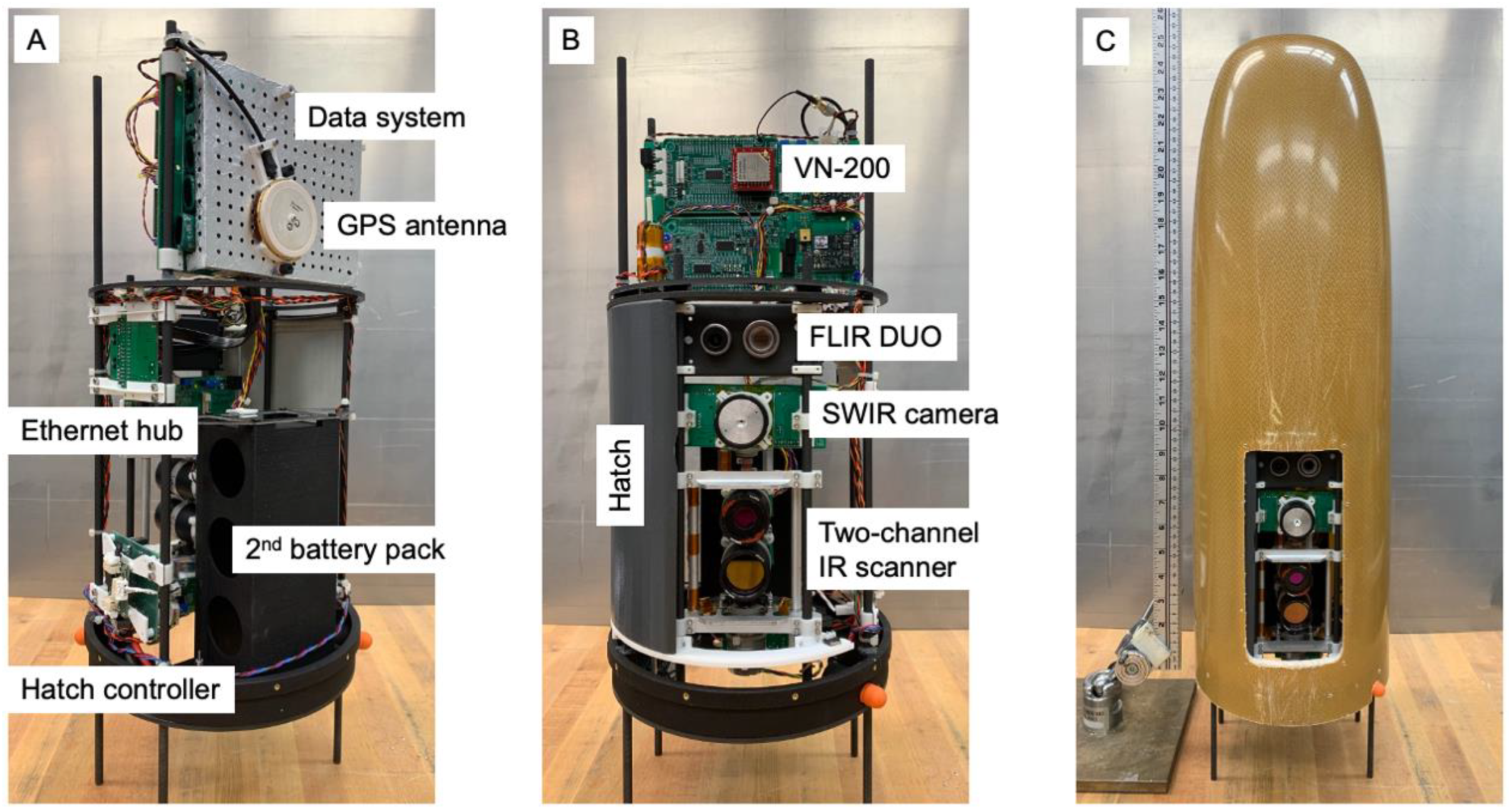
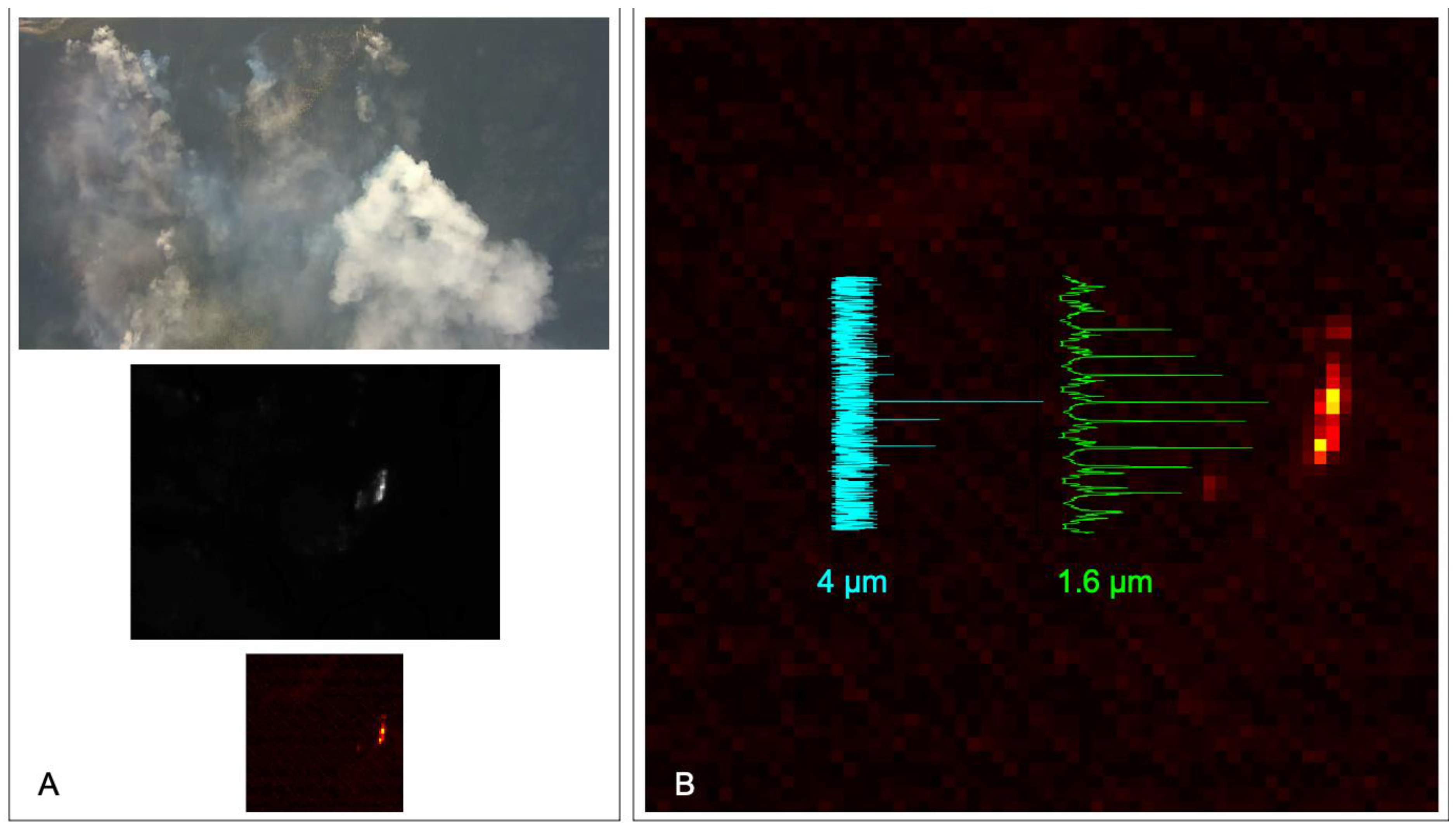
The AWSM system consists of three optical instruments with five individual sensors (two scanning telescopes and three cameras) for fire observations and a GPS-aided inertial navigation system (GPS/INS; VN-200, VectorNav, Dallas, TX, USA) for high frequency aircraft position and attitude determination. The first optical instrument is a cross-track scanner with two narrowband IR telescopes (4 µm and 1.6 µm) for FRP measurements. The second instrument is a broadband shortwave infrared (SWIR) camera (0.95–1.7 µm) for active fire mapping. Its wavelength range encompasses the narrow 1.6 µm band used by the 1.6 µm telescope, and therefore may be used to validate the telescopes’ data mapping algorithm. Both of these instruments are custom built. The third instrument is a commercial off-the-shelf visible/thermal IR dual camera for smoke and flame (visible band) and fire (thermal band) identification and mapping. Various system components were selected based on a range of factors including performance, size, weight, power required, availability and price.
The AWSM system design concept is to use the two scanner channels for calibrated FRP measurements with a 1° field of view (FOV), and the SWIR camera for higher resolution fire extent measurements. The thermal camera, sensitive to temperatures at or above ambient, is suitable for identifying recently burned areas and smoldering combustion. The visible camera records flames, and, during daytime, smoke plumes and the overall environment.
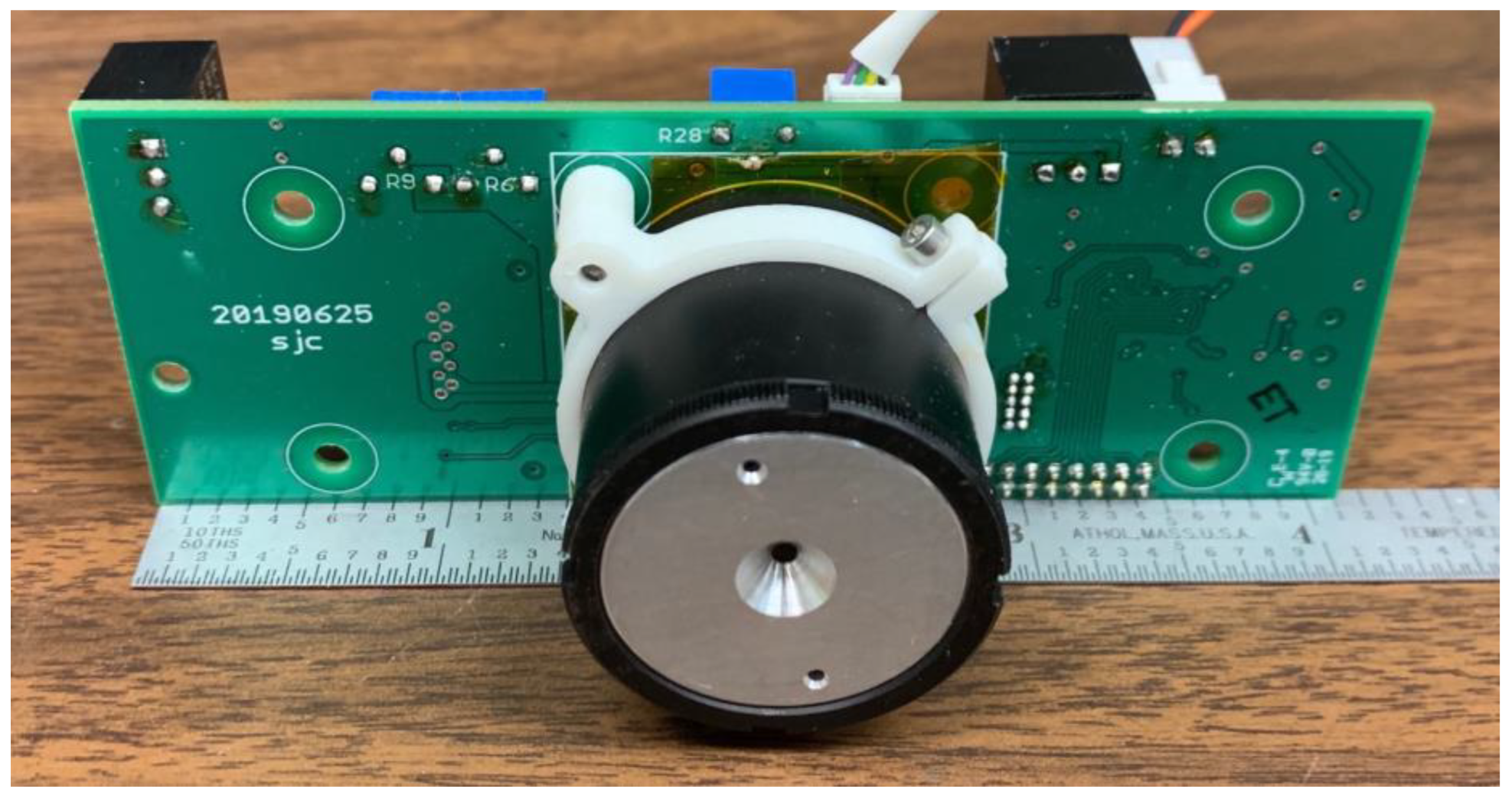
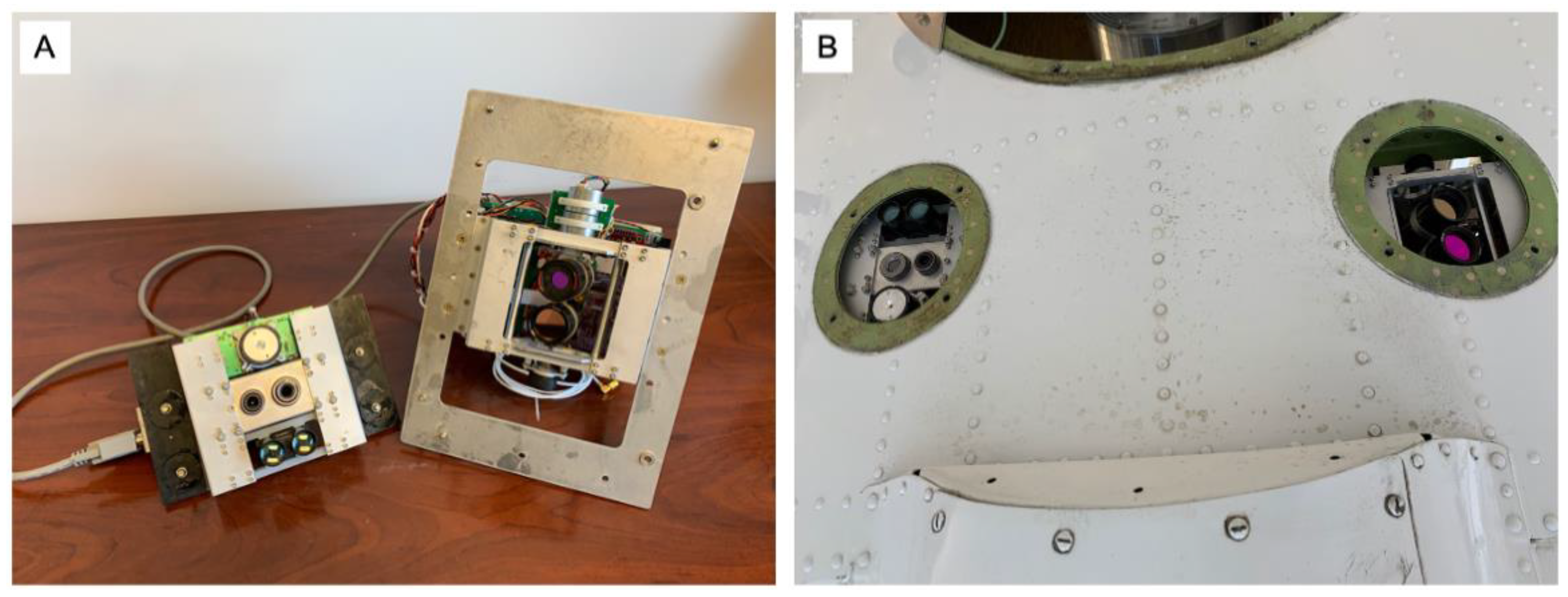
2.3. Two-Channel IR Scanner
The two channels in the IR scanner instrument consist of single-element sensors mounted in optical telescopes (
Figure 1) and are designed to detect fire and measure FRP. One channel measures FRP in the mid-wavelength infrared (MWIR) near 4 µm (3.925–3.995 µm), which closely matches the fire detection bands (21 and 22, 3.929–3.989 µm) of the MODIS satellite instrument and is similar to the M13 (3.97–4.13 µm) and I4 (3.55–3.93 µm) fire detection bands of VIIRS. The second scanner channel measures FRP in the SWIR near 1.6 µm (1.580–1.640 µm), which matches the VIIRS I3/M10 bands that have been used to detect and characterize oil well flaring. The two telescopes are scanned synchronously across the flight path at approximately 1 Hz (1 scan back and forth per second). Signals from both sensors are digitized at 1° intervals throughout the scan. The scan angle range in the described configuration is approximately ±58° from nadir, however the sensor views are blocked by the UAS nose cone or aircraft skin at large scan angles. As a result, only data with scan angles within ±30° of nadir are used for mapping and FRP determination, while data at large angles are used for monitoring sensor background signal levels. Both scopes have a 1° FOV, which yields a horizontal measurement scale of 0.0175–0.0230 × altitude, resulting in an 18–23 m diameter footprint when viewing from 1000 m above ground level (AGL) and with the 1° sampling interval provides effectively continuous spatial coverage at ground speeds of less than 20 m s
−1. The scan angle range is set by a 3D-printed cam, which can be replaced to adjust the scan range as desired for other configurations.
A primary reason for using scanning telescopes instead of wide angle, multi-element sensors (cameras) for the FRP measurements is to ensure a consistent wavelength band at all viewing angles. Narrowband optical filters perform as specified by manufacturers only when the incident light is perpendicular to the filter surfaces. It is impossible to use a single conventional filter to achieve uniform wavelength bandpass over the wide FOV of a camera.
The optical configuration of both telescopes is shown in
Figure 2. The incident light is focused to an aperture in the SWIR channel and directly onto the optical sensing element for the MWIR. The sizes of the SWIR aperture and MWIR optical sensing element are chosen such that only incident light within 0.5° of the lens axis will be detected, thus ensuring a 1° FOV.
The lenses, filters and sensors used in the two IR scanner channels are presented in
Table 1. Both sensors have built-in thermoelectric coolers (TECs), and both are operated at a setpoint of −10 °C as a compromise between low noise, low power consumption and low heat dissipation. The narrowband filters are placed in front of the lens in both telescopes. A 13 mm entrance aperture is installed in the front of the SWIR telescope to reduce the incident light and prevent the SWIR sensor from saturating below 1500 °C. The entrance aperture of the MWIR telescope is 23 mm, essentially the size of the lens, for most effective light collection.
The 1.6 µm channel is sensitive to sunlight reflected by the ground surface. During daytime, variations in reflected sunlight due to changes in solar and observations angles, surface topography and albedo can cause significant shifts in background signal convolved with the fire signal. This shift cannot be quantified because the 1.6 µm albedo of the burning vegetation is unknown. Therefore, the 1.6 µm sensor is less accurate during daylight time for FRP measurement. The 4 µm channel is effectively solar blind, and therefore may be used for FRP measurement in both daytime and nighttime.
Both scanner channels have been calibrated over a temperature range of 200–1500 °C using a commercial blackbody source (Landcal Type R1500T, Land Instruments International). Based on these calculations, we report FRP expressed as blackbody equivalent fire temperature.
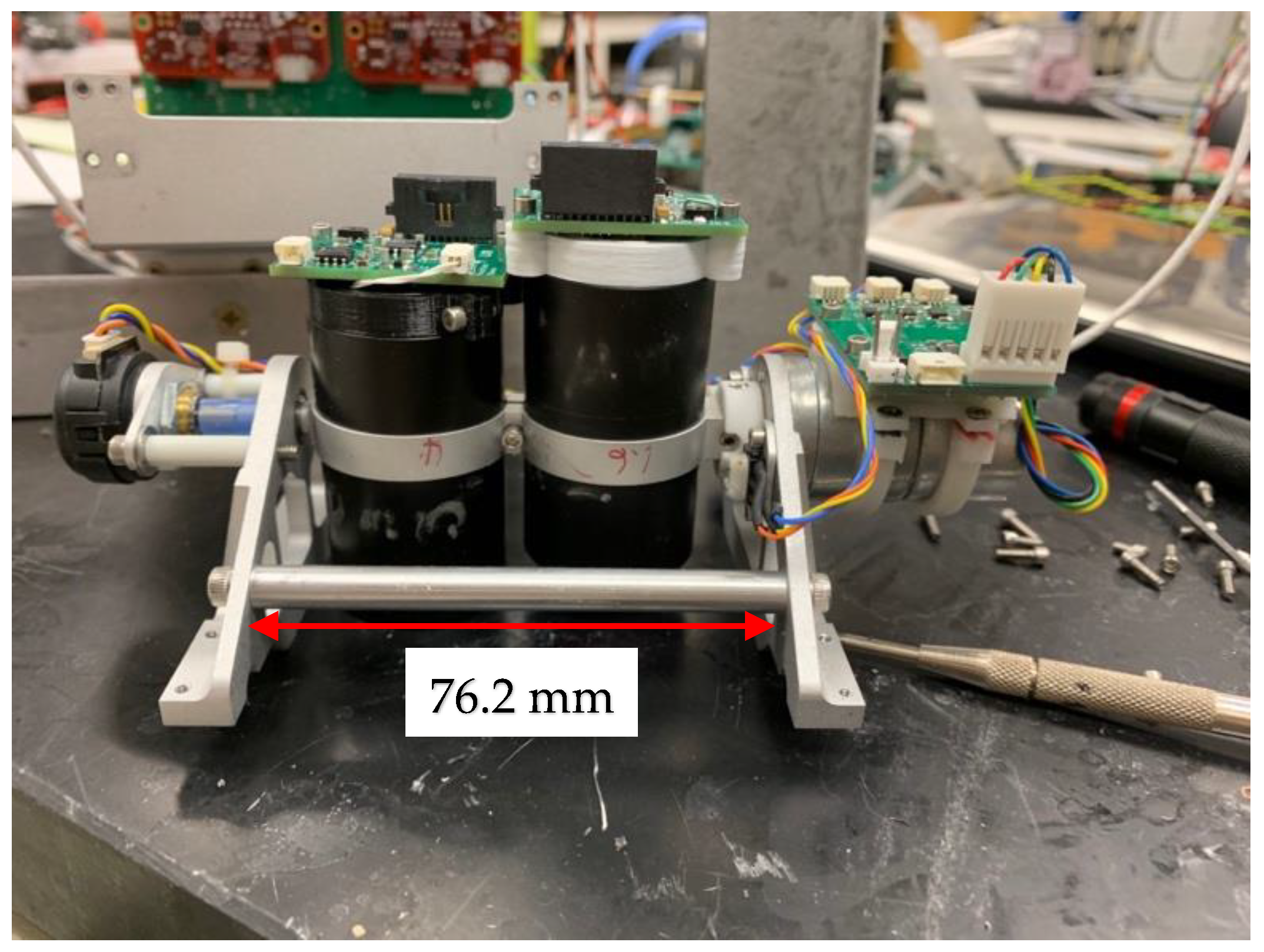
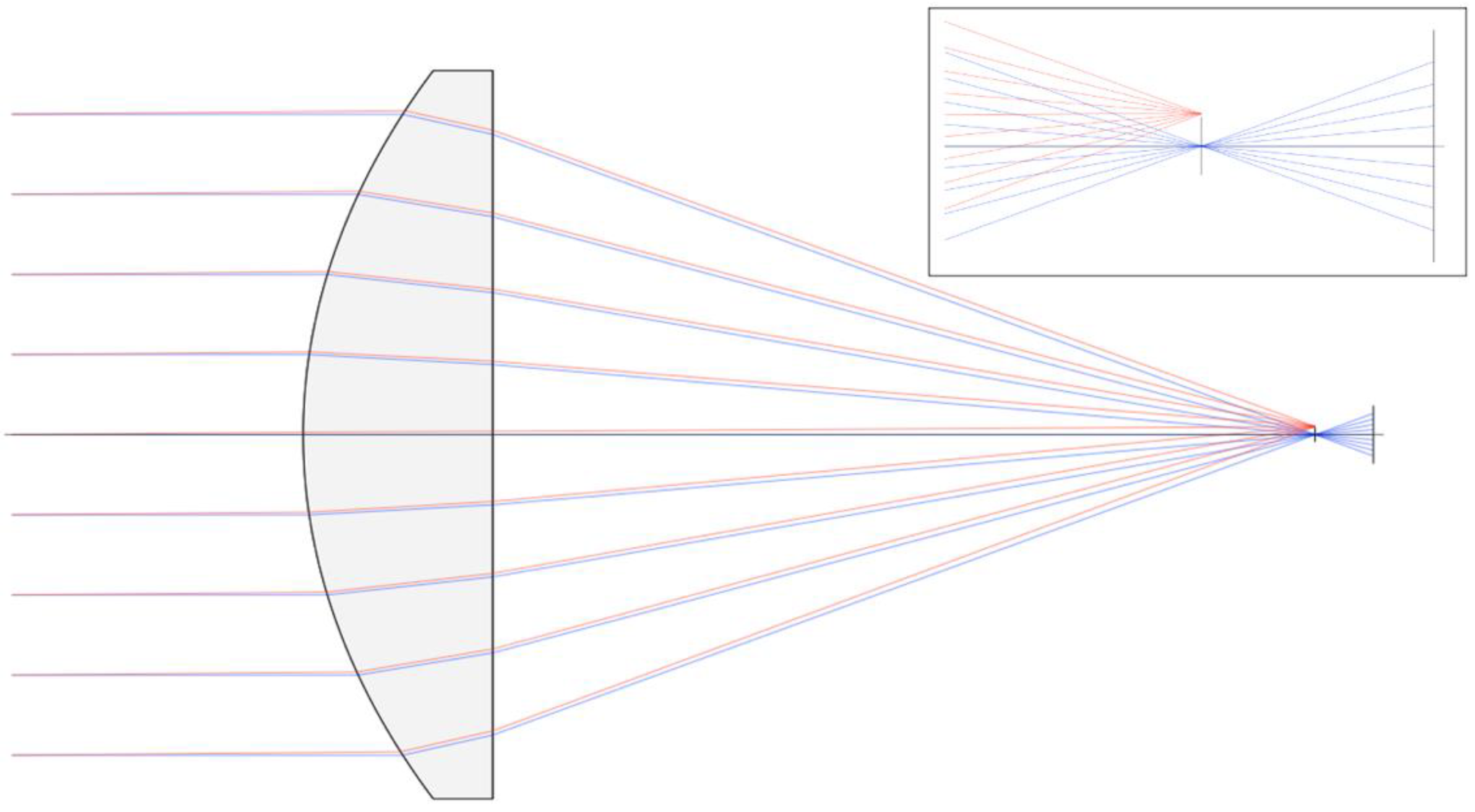
2.4. SWIR Camera
The custom SWIR camera (
Figure 3) was designed for fire perimeter and extent measurements and to provide a consistency reference for fire FRP mapping using the scanning sensors. The camera uses a Hamamatsu G11097-0606S 64 × 64 element array image sensor with a 0.95–1.7 µm spectral response wavelength range. A pair of 9 mm lenses forms a simple light collector, which produces a 26° × 26° FOV with very little distortion (
Figure 4). The angular resolution of the individual camera pixels is ~0.4° (26°/64). The camera is set to record images at a rate of 1 frame per second, which is sufficiently fast to provide overlapping images for full swath coverage during flight at design altitude and speed.
2.5. Visible/Thermal IR Dual Camera
The FLIR DUO/DUO-R visible/thermal dual camera (Teledyne FLIR, Wilsonville, OR) was selected for the AWSM instrument suite. This camera was chosen because of its compact size (41 × 59 × 30 mm), light weight (84 g) and reasonably low price (~USD 1000). The visible camera has 1920 × 1080 pixels with an 82° × 52° FOV. The thermal camera has 160 × 120 pixels, a sensing wavelength range of 7.5–13.5 µm, and a 57° × 44° FOV. The thermal camera saturates at approximately 380 °C. During AWSM operation, the dual camera records simultaneous visible and thermal images at 1 Hz, sufficient to produce overlapping images for full swath coverage.
2.6. Data System
Two Beagle Bone Black (BBB) industrial microcomputers (
https://beagleboard.org/black, (accessed on 12 March 2023)) are employed for data acquisition and control of the AWSM instrument suite. One BBB is used to control the SWIR imager and the cross-track scanner and read their respective output data. The other BBB is used to read the data from the VectorNav VN-200. The time on the two BBBs is synchronized via an ethernet switch module (TE-202-003, SuperDroid Robots, Fuquay-Varina, NC, USA). As a result, all data read by both BBBs are synchronized. The FLIR Duo camera does not have a persistent internal clock or onboard storage and instead derives its file timestamp from the USB connection to the sensor BBB or another computer to which it is connected and where the files are saved. When a computer other than the sensor BBB is used, the fidelity of the synchronization with the BBBs is more difficult to maintain and additional effort in post-processing is required to align the images with the SWIR imager and scanner data.
4. Conclusions
A miniature remote sensing instrument suite, AWSM, with three optical instruments covering four wavelength bands for wildfire FRP measurement and fire extent mapping has been designed, constructed and flown onboard a small UAS and a crewed aircraft. The goal of the project was to develop an instrument package that is compact, lightweight and relatively inexpensive, with low power consumption, suitable for small UAS deployment, yet is sufficiently sensitive to provide a research quality complement to satellite and large research-grade airborne instruments. The AWSM payload system is highly configurable and could be easily adapted for use on a number of different aerial platforms such as multirotor drones without significant modification. The ultimate goal is to develop a sensor suite that could be widely adopted for wildfire incident command situational awareness and fire weather model input data collection with small UASs and light crewed aircraft.
The completed AWSM package meets the design criteria of being light weight (1500 g), sensitive (minimum pixel average FRP detection temperature of 320 °C), low power (15 W) and relatively low cost (~USD 11 k excluding labor). The most important applications of the package are fire area mapping and fire radiative power measurement. At the design operational altitude of 1 km AGL, the spatial resolution for these two functions are approximately 7 m and 18 m, respectively. These values are comparable to those from much more sophisticated, large scientific instruments such as MASTER flown on the NASA DC-8 aircraft at the typical cruise altitude of ~12 km.
The AWSM package is very robust despite its appearance. Onboard the S2 UAS, the package endured multiple 10 g launches and belly-skid landings hard enough to crack a carbon fiber nose cone without experiencing any performance degradation. Being lightweight, robust and relatively inexpensive, AWSM is ideal for UAS platforms and light manned aircraft for routine operations.


 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}