

An Electro-Oculogram (EOG) Sensor’s Ability to Detect Driver Hypovigilance Using Machine Learning


 ,
,  , and
, and 
Abstract
:1. Introduction
1.1. Motivation
1.2. Contribution
- ➢
- Designing a protocol to induce hypovigilance.
- ➢
- Acquiring the EOG recordings from 10 subjects driving at three different times of the day.
- ➢
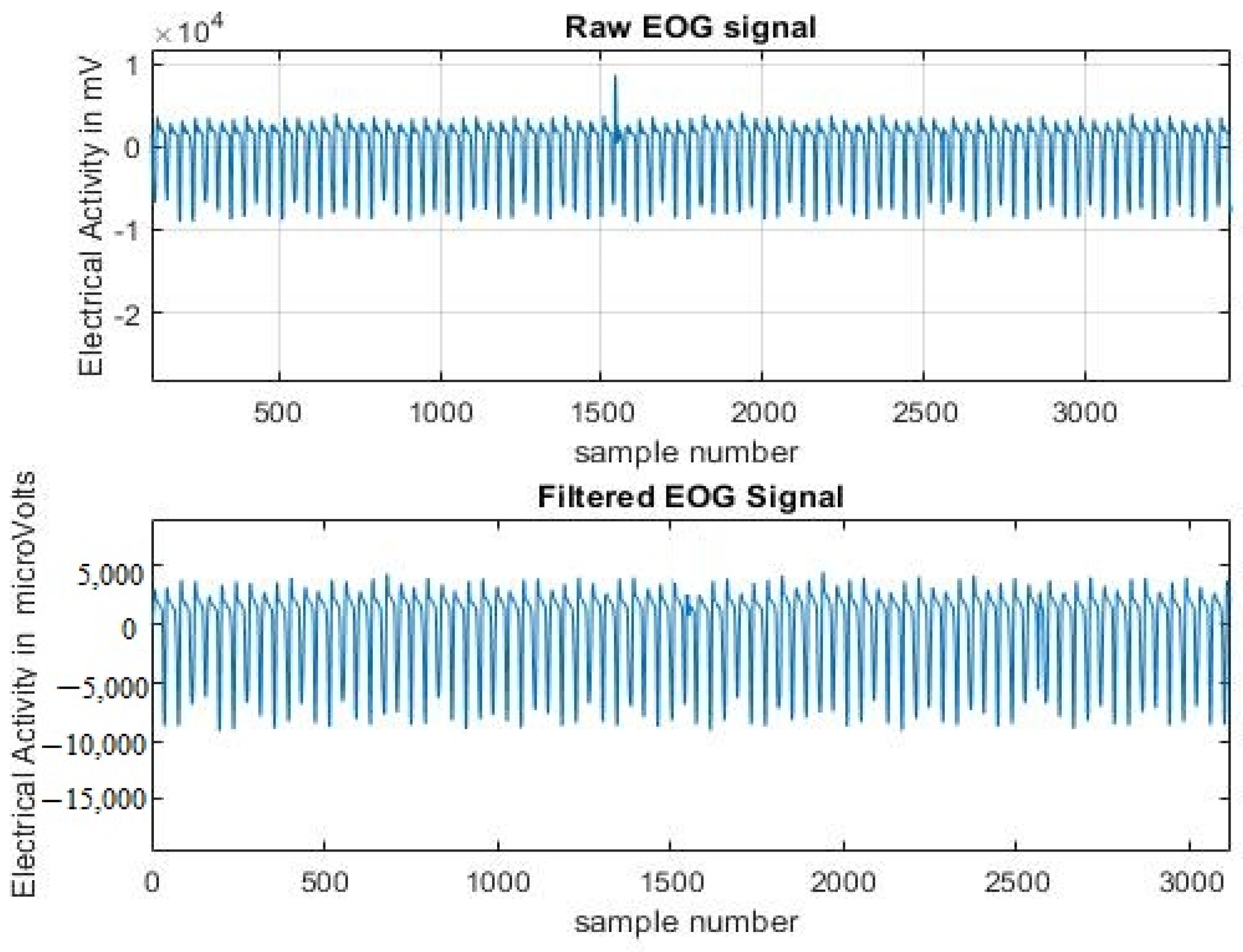
- The collected driver physiological information is pre-processed using various filtering techniques.
- ➢
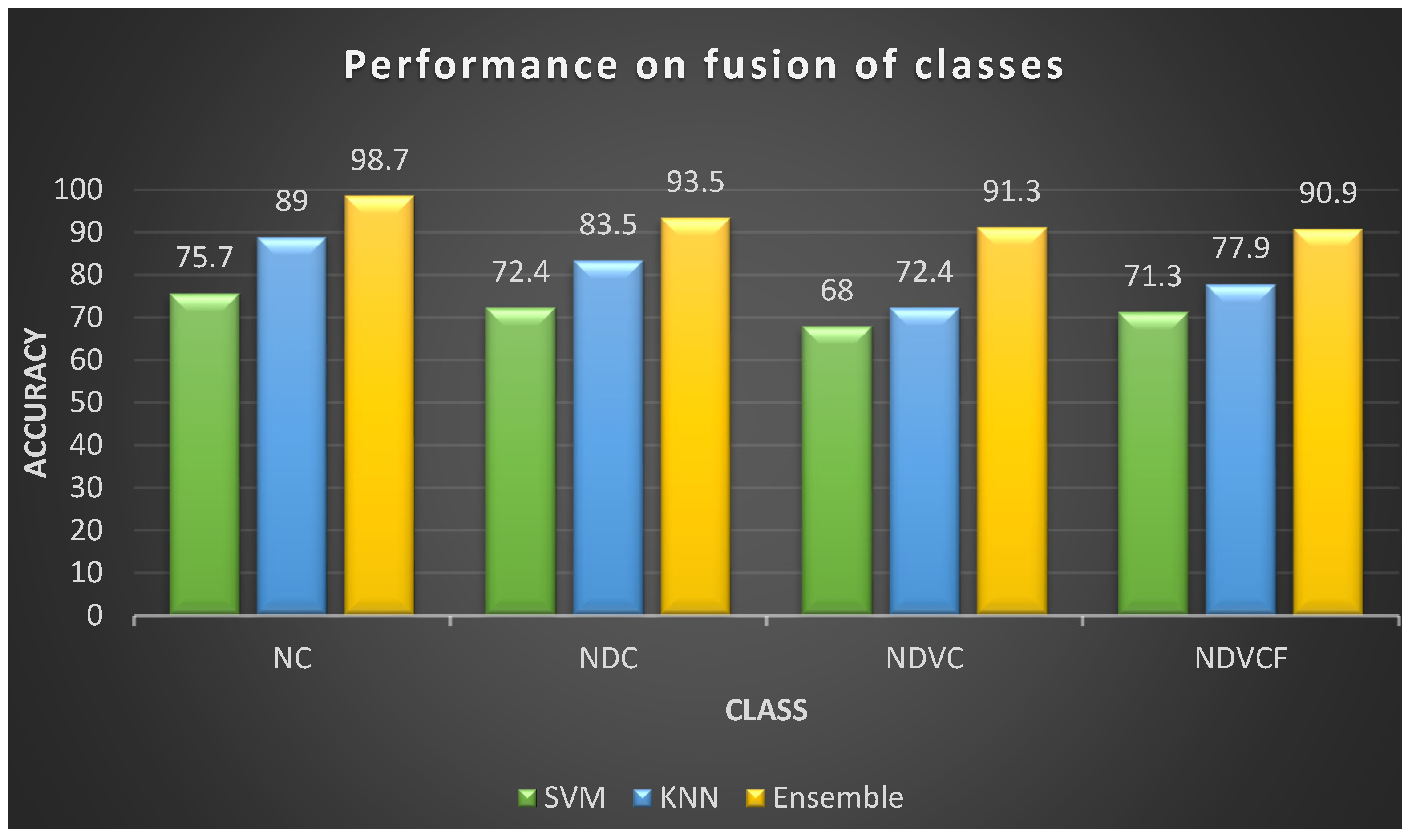
- The classification in five classes (normal, visual inattention, cognitive inattention, fatigue, and drowsy) in which detection performed better with the Ensemble classifier.
- ➢
- The performance of hypovigilance detection by combining the significant features obtained a better accuracy of 90.9%.
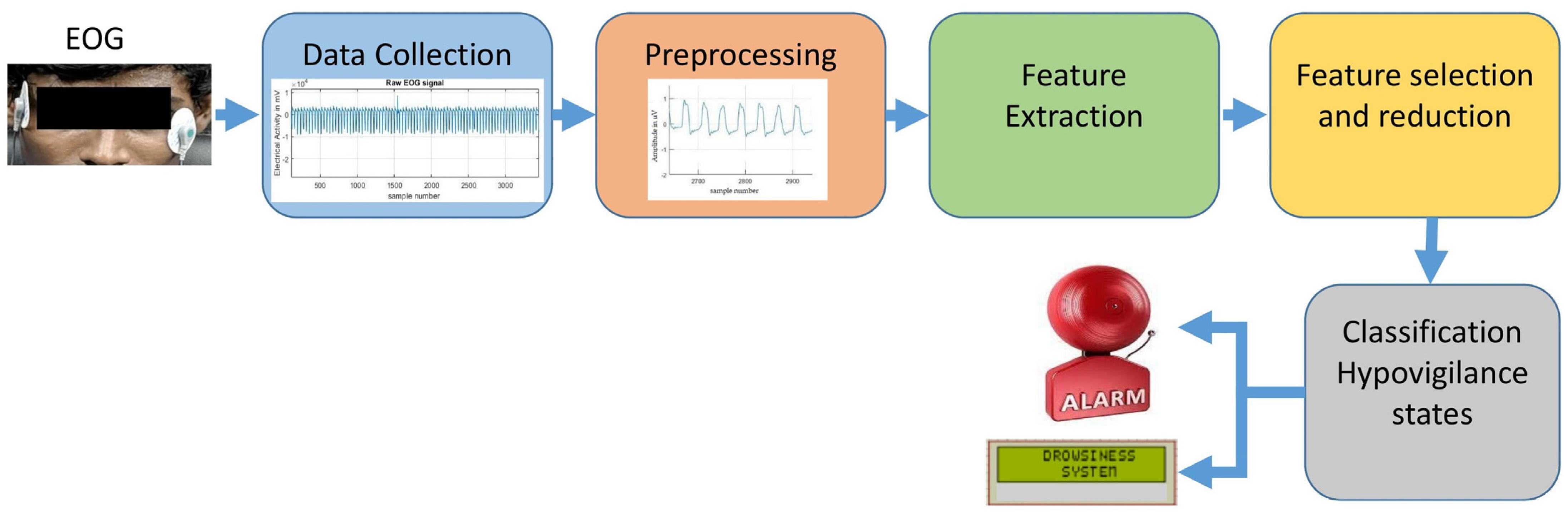
2. Materials and Methods
2.1. Experimental Design
- ➢
- 12:00–2:00 a.m.;
- ➢
- 3:00–5:00 a.m.;
- ➢
- 2:00–4:00 p.m.
2.2. Data Collection
2.3. Pre-Processing
2.4. Feature Extraction
3. Results
3.1. Feature Selection
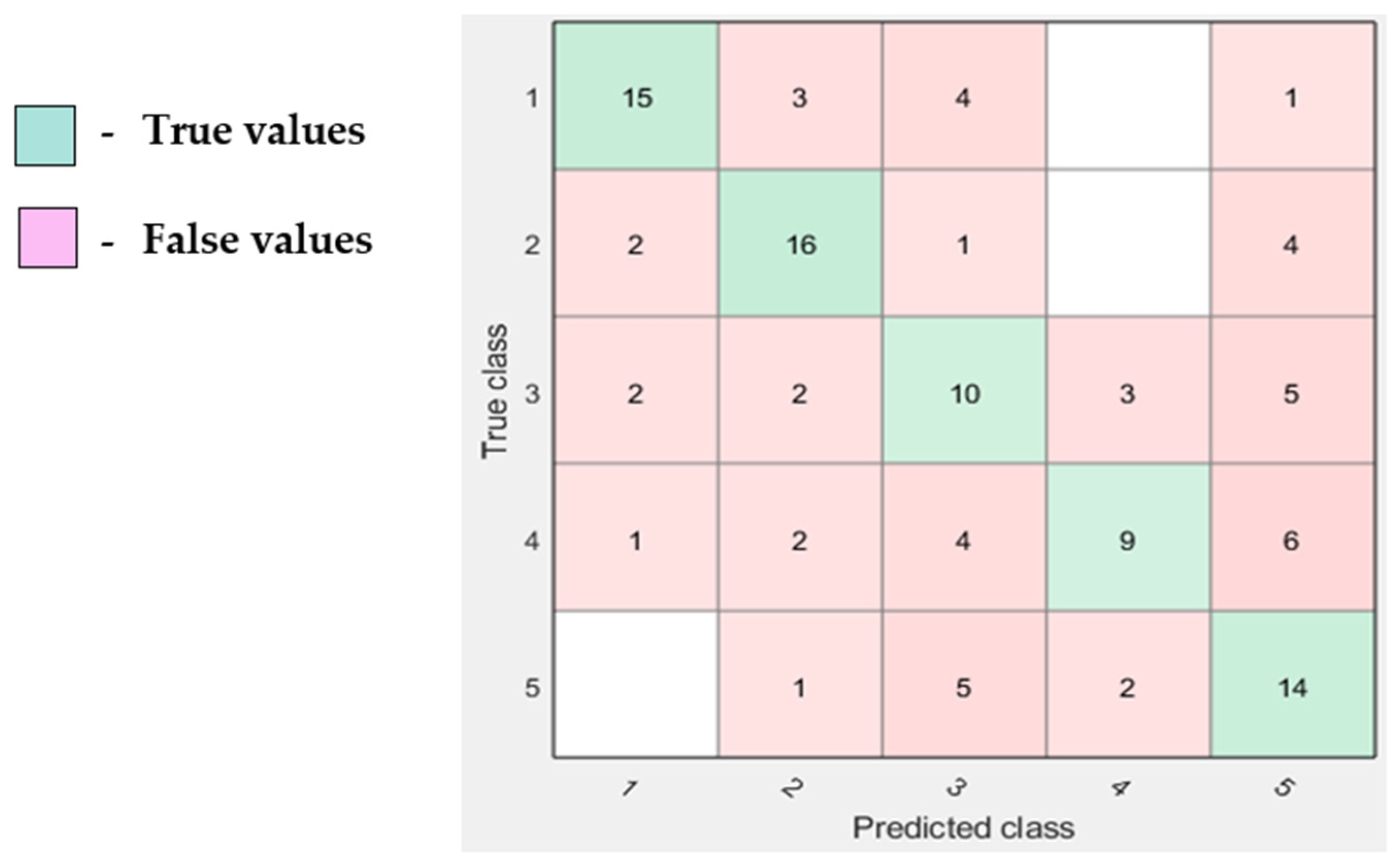
3.2. Classification
- (i)
- AccuracyACC = (TP + TN)/(TP + TN + FP + FN)
- (ii)
- Sensitivity (or) RecallRecall = TP/(TP + FN)
- (iii)
- SpecificitySpecificity = TN/(TN + FP)
- (iv)
- PrecisionPrecision = TP/(TP + FP)
- (v)
- Error RateError rate = (FP + FN)/(TP + TN + FP + FN)
4. Discussion
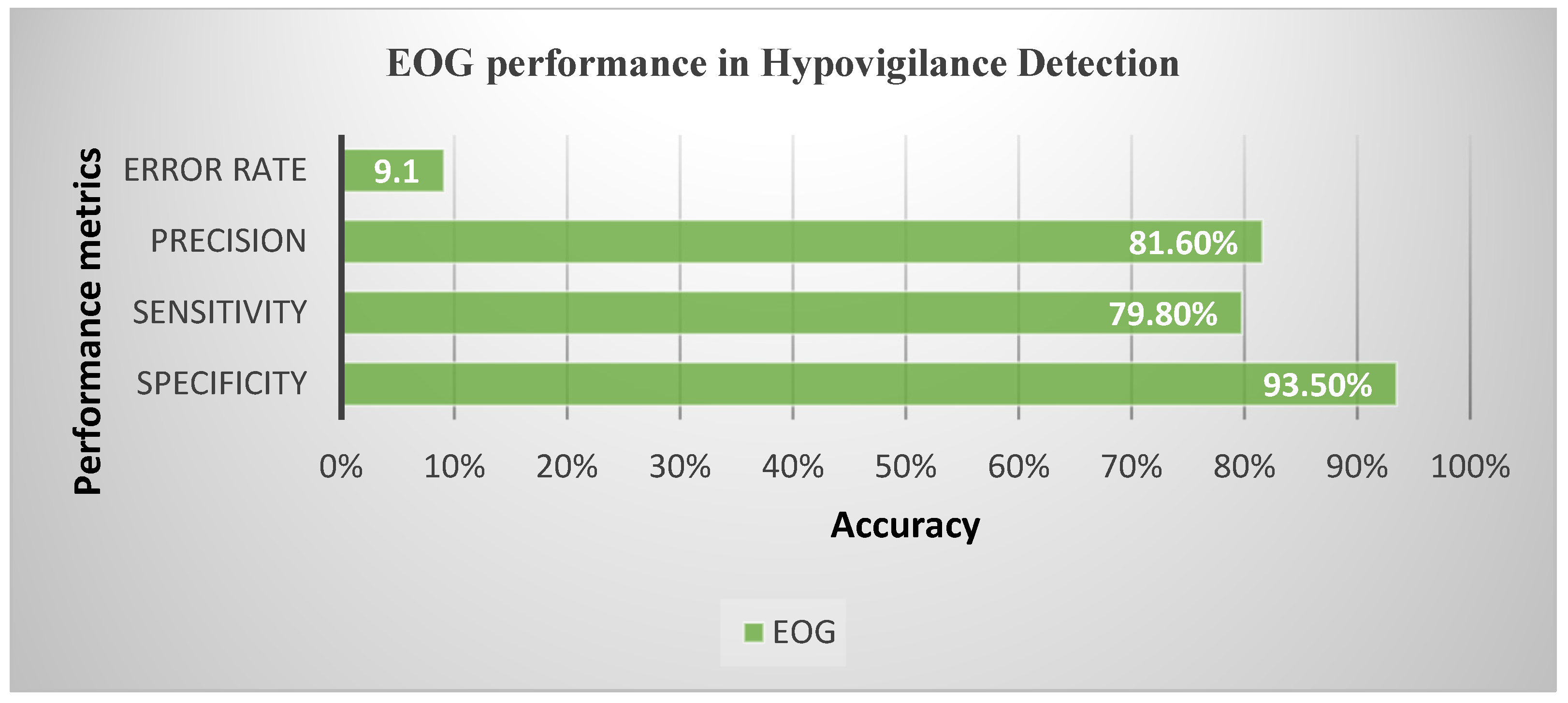
Performance on Hypovigilance Detection
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Optalert. Drowsiness vs. Fatigue: How Do They Differ. 2017. Available online: https://www.optalert.com/drowsiness-vs-fatigue-how-do-they-differ/ (accessed on 5 June 2017).
- World Health Organization (WHO). Association for Safe International Road Travel (ASIRT); WHO: Geneva, Switzerland, 2018. [Google Scholar]
- Ministry of Road Transport and Highways (MoRTH). Road Accidents in India 2017; MoRTH: New Delhi, India, 2017. [Google Scholar]
- Alazab, M.; Lakshmanna, K.; Reddy, G.T.; Pham, Q.-V.; Maddikunta, P.K.R. Multi-objective cluster head selection using fitness averaged rider optimization algorithm for IoT networks in smart cities. Sustain. Energy Technol. Assess. 2021, 43, 100973. [Google Scholar] [CrossRef]
- Gao, H.; Qin, Y.; Hu, C.; Liu, Y.; Li, K. An Interacting Multiple Model for Trajectory Prediction of Intelligent Vehicles in Typical Road Traffic Scenario. IEEE Trans. Neural Netw. Learn. Syst. 2021. [Google Scholar] [CrossRef] [PubMed]
- Gao, H.; Lv, C.; Zhang, T.; Zhao, H.; Jiang, L.; Zhou, J.; Liu, Y.; Huang, Y.; Han, C. A Structure Constraint Matrix Factorization Framework for Human Behavior Segmentation. IEEE Trans. Cybern. 2021, 52, 12978–12988. [Google Scholar] [CrossRef] [PubMed]
- Gao, H.; Kan, Z.; Li, K. Robust Lateral Trajectory following Control of Unmanned Vehicle Based on Model Predictive Control. IEEE/ASME Trans. Mechatron. 2021, 27, 1278–1287. [Google Scholar] [CrossRef]
- Sahayadhas, A.; Sundaraj, K.; Murugappan, M. Electromyogram signal based hypovigilance detection. Biomed. Res. 2014, 25, 281–288. [Google Scholar]
- Sommer, D.; Golz, M.; Trutschel, U.; Edwards, D. Biosignal Based Discrimination between Slight and Strong Driver Hypovigilance by Support-Vector Machines. In Proceedings of the Agents and Artificial Intelligence: International Conference, ICAART 2009, Porto, Portugal, 19–21 January 2009; Volume 67, pp. 177–187. [Google Scholar]
- Reddy, G.T.; Reddy, M.P.K.; Lakshmanna, K.; Rajput, D.S.; Kaluri, R.; Srivastava, G. Hybrid genetic algorithm and a fuzzy logic classifier for heart disease diagnosis. Evol. Intell. 2019, 13, 185–196. [Google Scholar] [CrossRef]
- Shi, L.-C.; Lu, B.-L.; Ma, J.-X. An EOG—Based Vigilance Estimation Method Applied for Driver Fatigue Detection. Neurosci. Biomed. Eng. 2015, 2, 41–51. [Google Scholar]
- Firke, O.K.; Jain, M. Analysis of Driver Drowsiness Detection using EEG and EOG. Int. J. Eng. Technol. 2018, 7, 46–51. [Google Scholar] [CrossRef] [Green Version]
- Pan, X.; Cai, X.; Song, K.; Baker, T.; Gadekallu, T.R.; Yuan, X. Location Recommendation Based on Mobility Graph with Individual and Group Influences. IEEE Trans. Intell. Transp. Syst. 2022, 1–12. [Google Scholar] [CrossRef]
- Picot, A.; Charbonnier, S.; Caplier, A. On-line detection of drowsiness using brain and visual information. IEEE Trans. Syst. Man, Cybern. Part A Syst. Humans 2011, 42, 764–775. [Google Scholar] [CrossRef]
- Zhu, X.; Zheng, W.-L.; Lu, B.-L.; Chen, X.; Chen, S.; Wang, C. EOG-based drowsiness detection using convolutional neural networks. In Proceedings of the 2014 International Joint Conference on Neural Networks (IJCNN), Beijing, China, 6–11 July 2014; pp. 128–134. [Google Scholar]
- Deepa, N.; Pham, Q.V.; Nguyen, D.C.; Bhattacharya, S.; Prabadevi, B.; Gadekallu, T.R.; Maddikunta, P.K.R.; Fang, F.; Pathirana, P.N. A survey on blockchain for big data: Approaches, opportunities, and future directions. Future Gener. Comput. Syst. 2022, 131, 209–226. [Google Scholar] [CrossRef]
- Ravi, C.; Tigga, A.; Reddy, G.T.; Hakak, S.; Alazab, M. Driver Identification Using Optimized Deep Learning Model in Smart Transportation. ACM Trans. Internet Technol. 2022, 22, 1–17. [Google Scholar] [CrossRef]
- Merino, M.; Rivera, O.; Gomez, I.; Molina, A.; Dorronzoro, E. A Method of EOG Signal Processing to Detect the Direction of Eye Movements. In Proceedings of the 2010 First International Conference on Sensor Device Technologies and Applications, Venice, Italy, 18–25 July 2010; pp. 100–105. [Google Scholar]
- Lakshmanna, K.; VIT University; Khare, N. FDSMO: Frequent DNA Sequence Mining Using FBSB and Optimization. Int. J. Intell. Eng. Syst. 2016, 9, 157–166. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, H.; Fu, R. Automated Detection of Driver Fatigue Based on Entropy and Complexity Measures. IEEE Trans. Intell. Transp. Syst. 2013, 15, 168–177. [Google Scholar] [CrossRef]
- Estrada, E.; Nazeran, H.; Barragan, J.; Burk, J.R.; Lucas, E.A.; Behbehani, K. EOG and EMG: Two Important Switches in Automatic Sleep Stage Classification. In Proceedings of the 2006 International Conference of the IEEE Engineering in Medicine and Biology Society, New York, NY, USA, 30 August 2006–3 September 2006; pp. 2458–2461. [Google Scholar]
- Chieh, T.C.; Mustafa, M.M.; Hussain, A.; Hendi, S.F.; Majlis, B.Y. Development of Vehicle Driver Drowsiness Detection System Using Electrooculogram (EOG). In Proceedings of the 2005 1st International Conference on Computers, Communications, & Signal Processing with Special Track on Biomedical Engineering, Kuala Lumpur, Malaysia, 14–16 November 2005; pp. 165–168. [Google Scholar]
- Noori, S.M.R.; Mikaeili, M. Detecting driving drowsiness using EEG, EOG and driving quality signals. In Proceedings of the 2015 22nd Iranian Conference on Biomedical Engineering (ICBME), Tehran, Iran, 25–27 November 2015; pp. 210–215. [Google Scholar]
- Mu, Z.; Hu, J.; Yin, J. Driving Fatigue Detecting Based on EEG Signals of Forehead Area. Int. J. Pattern Recognit. Artif. Intell. 2017, 31, 1750011. [Google Scholar] [CrossRef]
- Vidhya, S.R.S.; Arunachalam, A.R. Machine learning techniques for Morphologic and Clinical Features Extraction of Cerebral Aneurysm. In Proceedings of the 10th IEEE International Conference on Communication Systems and Network Technologies (CSNT), Bhopal, India, 18–19 June 2021; pp. 617–621. [Google Scholar]
- Yue, C. EOG Signals in Drowsiness Research. Ph.D. Thesis, University of Linköping, Linköping, Sweden, 2011. Available online: https://www.diva-portal.org/smash/get/diva2:555912/FULLTEXT01.pdf (accessed on 15 January 2023).
- Barua, S.; Uddin, M.; Ahlström, C.; Begum, S. Automatic driver sleepiness detection using EEG, EOG and contextual information. Expert Syst. Appl. 2019, 115, 121–135. [Google Scholar] [CrossRef]
- Huo, X.; Zheng, W.; Lu, B. Driving Fatigue Detection with Fusion of EEG and Forehead EOG. In Proceedings of the 2016 International Joint Conference on Neural Networks (IJCNN), Vancouver, BC, Canada, 24–29 July 2016; pp. 897–904. [Google Scholar]
- Lakshmanna, K.; Khare, N. Constraint-based measures for DNA sequence mining using group search optimization algorithm. Int. J. Intell. Eng. Syst. 2016, 9, 91–100. [Google Scholar] [CrossRef]
- He, J.; Choi, W.; Yang, Y.; Lu, J.; Wu, X. Detection of driver drowsiness using wearable devices: A feasibility study of the proximity sensor. Appl. Ergon. 2017, 65, 473–480. [Google Scholar] [CrossRef]
- Lakshmanna, K.; Khare, N. Mining DNA Sequence Patterns with Constraints Using Hybridization of Firefly and Group Search Optimization. J. Intell. Syst. 2017, 27, 349–362. [Google Scholar] [CrossRef]
- Picot, A.; Charbonnier, S.; Caplier, A. EOG-based drowsiness detection: Comparison between a fuzzy system and two supervised learning classifiers. IFAC Proc. Vol. 2011, 44, 14283–14288. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Gao, X.; Zhu, J.; Zheng, W.; Lu, B.-L. A Novel Approach to Driving Fatigue Detection Using Forehead EOG. In Proceedings of the 2015 7th International IEEE/EMBS Conference on Neural Engineering (NER), Montpellier, France, 22–24 April 2015; pp. 707–710. [Google Scholar]
- Kaplan, S.; Guvensan, M.A.M.; Yavuz, A.G.; Karalurt, Y. Driver Behavior Analysis for Safe Driving: A Survey. IEEE Trans. Intell. Transp. Syst. 2015, 16, 3017–3032. [Google Scholar] [CrossRef]
- Wu, Y.; Kihara, K.; Takeda, Y.; Sato, T.; Akamatsu, M.; Kitazaki, S.; Nakagawa, K.; Yamada, K.; Oka, H.; Kameyama, S. Eye movements predict driver reaction time to takeover request in automated driving: A real-vehicle study. Transp. Res. Part F Traffic Psychol. Behav. 2021, 81, 355–363. [Google Scholar] [CrossRef]
- Jerritta, S.; Murugappan, M.; Wan, K.; Yaacob, S. Emotion recognition from facial EMG signals using higher order statistics and principal component analysis. J. Chin. Inst. Eng. 2014, 37, 385–394. [Google Scholar] [CrossRef]
- Murugan, S.; Selviaraj, J.; Sahayadhas, A. Detection and analysis: Driver state with electrocardiogram (ECG). Phys. Eng. Sci. Med. 2020, 43, 525–537. [Google Scholar] [CrossRef] [PubMed]
- Phinyomark, A.; Phukpattaranont, P.; Limsakul, C. Expert Systems with Applications Feature reduction and selection for EMG signal classification. Expert Syst. Appl. 2012, 39, 7420–7431. [Google Scholar] [CrossRef]
- Anandhi, B.; Jerritta, S.; Anusuya, I.G.; Das, H. Time Domain Analysis of Heart Rate Variability Signals in Valence Recognition for Children with Autism Spectrum Disorder (ASD). IRBM 2022, 43, 380–390. [Google Scholar] [CrossRef]
- Dehzangi, O.; Masilamani, S. Unobtrusive Driver Drowsiness Prediction Using Driving Behavior from Vehicular Sensors. In Proceedings of the 2018 24th International Conference on Pattern Recognition (ICPR), Beijing, China, 20–24 August 2018; pp. 3598–3603. [Google Scholar]
- Vidhya, S.R.S.; Arunachalam, A.R. Automated Detection of False positives and false negatives in Cerebral Aneurysms from MR Angiography Images by Deep Learning Methods. In Proceedings of the 2021 International Conference on System, Computation, Automation and Networking (ICSCAN), Puducherry, India, 30–31 July 2021; pp. 1–4. [Google Scholar]
- Kumar, S.P.; Murugan, S.; Selvaraj, J.; Sahayadhas, A. Detecting driver mental fatigue based on Electroencephalogram (EEG) signals during simulated driving. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1070, 012096. [Google Scholar] [CrossRef]
- Khaparde, A.R.; Alassery, F.; Kumar, A.; Alotaibi, Y. Differential Evolution Algorithm with Hierarchical Fair Competition Model. Intell. Autom. Soft Comput. 2022, 33, 1045–1062. [Google Scholar] [CrossRef]
- Sivakumar, P.K.; Selvaraj, J.; Ramaraj, K.; Sahayadhas, A. Analysis of alpha and theta band to detect driver drowsiness using electroencephalogram (Eeg) signals. Int. Arab J. Inf. Technol. 2021, 18, 578–584. [Google Scholar] [CrossRef]
- Cafasso, A.; Karlsson, S. Automatic Detection of Saccadic Eye Movements Using EOG for Analysing Effects of Cognitive Distraction during Driving. Ph.D. Thesis, Biomedical Engineering, Chalmers University of Technology, Göteborg, Sweden, 2017. [Google Scholar]
- Sommer, D.; Golz, M.; Edwards, D. Determination of driver’s hypovigilance from biosignals. In Proceedings of the ICAART, Porto, Portugal, 19–21 January 2009; pp. 130–135. [Google Scholar]
- Rostaminia, S.; Mayberry, A.; Ganesan, D.; Marlin, B.; Gummeson, J. iLid: Low-power Sensing of Fatigue and Drowsiness Measures on a Computational Eyeglass. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2018, 1, 1–26. [Google Scholar] [CrossRef] [Green Version]
- Wu, W.; Wu, Q.M.J.; Sun, W.; Yang, Y.; Yuan, X.; Zheng, W.-L.; Lu, B.-L. A Regression Method with Subnetwork Neurons for Vigilance Estimation Using EOG and EEG. IEEE Trans. Cogn. Dev. Syst. 2021, 13, 209–222. [Google Scholar] [CrossRef] [Green Version]
- Li, D.; Gao, H. A Hardware Platform Framework for an Intelligent Vehicle Based on a Driving Brain. Engineering 2018, 4, 464–470. [Google Scholar] [CrossRef]
- Jothsna, V.; Patel, I.; Raghu, K.; Jahnavi, P.; Reddy, K.N.; Saikumar, K. A Fuzzy Expert System for the Drowsiness Detection from Blink Characteristics. In Proceedings of the 2021 7th International Conference on Advanced Computing and Communication Systems (ICACCS), Coimbatore, India, 19–20 March 2021; pp. 1976–1981. [Google Scholar] [CrossRef]
- Lai, W.-C.; Srividhya, S.R. A Modified LBP Operator-Based Optimized Fuzzy Art Map Medical Image Retrieval System for Disease Diagnosis and Prediction. Biomedicine 2022, 10, 2438. [Google Scholar] [CrossRef]
- Rajeswari, A.R.; Lai, W.-C.; Kavitha, C.; Balasubramanian, P.K.; Srividhya, S.R. A Trust-Based Secure Neuro Fuzzy Clustering Technique for Mobile Ad Hoc Networks. Electronics 2023, 12, 274. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equations for Features | |
|---|---|
| Standard Deviation | Root Mean Square |
| Features | Right Eye (p < 0.05) | Left Eye (p < 0.05) |
|---|---|---|
| Mean | 0.000 | 0.000 |
| Median | 0.868 | 0.721 |
| Maximum | 0.007 | 0.025 |
| Minimum | 0.013 | 0.041 |
| Power | 0.014 | 0.180 |
| Energy | 0.001 | 0.005 |
| Hurst | 0.000 | 0.000 |
| Variance | 0.019 | 0.065 |
| RMS | 0.182 | 0.337 |
| SD | 0.182 | 0.337 |
| Sample entropy | 0.000 | 0.000 |
| Harmonic Mean | 0.582 | 0.850 |
| Trimmean | 0.615 | 0.673 |
| Skewness | 0.210 | 0.052 |
| Kurtosis | 0.692 | 0.106 |
| Mode | 0.000 | 0.000 |
| Hypovigilance Detection | EOG Left Eye | EOG Right Eye | ||||
|---|---|---|---|---|---|---|
| SVM | KNN | Ensemble | SVM | KNN | Ensemble | |
| ND | 80.2% | 84.4% | 90.2% | 80.2% | 86.8% | 94.6% |
| NV | 82.2% | 77.5% | 94.6% | 82.4% | 80.2% | 96.3% |
| NC | 71.3% | 73.5% | 89.0% | 75.7% | 89.0% | 98.7% |
| NF | 84.6% | 85.7% | 89.0% | 81.3% | 85.7% | 90.7% |
| NDF | 73.5% | 77.9% | 91.0% | 77.9% | 79.0% | 91.3% |
| NDV | 75.7% | 84.6% | 88.0% | 79.0% | 83.5% | 90.2% |
| NDC | 76.8% | 82.4% | 87.9% | 72.4% | 83.5% | 93.5% |
| NDVC | 88.0% | 66.8% | 82.7% | 68.0% | 72.4% | 91.3% |
| NDVF | 66.8% | 78.0% | 90.2% | 71.3% | 73.5% | 82.4% |
| NDCF | 77.9% | 81.3% | 83.5% | 74.6% | 86.8% | 85.7% |
| NDVCF | 69.0% | 76.8% | 86.6% | 71.3% | 77.9% | 90.9% |
| Performance of Hypovigilance Detection on the Fusion of Classes | |||||||
|---|---|---|---|---|---|---|---|
| Classifier | Normal | Drowsy | Fatigue | Visual Inattention | Cognitive Inattention | Average | |
| Before PCA | SVM | 69.5 | 77.5 | 71.3 | 81.6 | 79.2 | 75.9% |
| KNN | 69.5 | 89.5 | 81.3 | 93.6 | 95.2 | 85.4% | |
| Ensemble | 83.5 | 91.5 | 82.5 | 92.6 | 95.3 | 89.3% | |
| After PCA | SVM | 71.5 | 77.5 | 73.3 | 83.6 | 80.2 | 76.8% |
| KNN | 83.5 | 91.3 | 82.3 | 92.4 | 95.1 | 89.1% | |
| Ensemble | 85.5 | 92.3 | 83.3 | 93.4 | 96.1 | 90.9% | |
| Reference | Measures | Techniques | Detection | Accuracy |
|---|---|---|---|---|
| [45] | Physiological (EOG) | Neural network-based sampling with a greater optimized cross-sampling approach | Fatigue and Drowsiness | Blink, blink duration, eyelid location, PERCLOS are detected with few percent error |
| [46] | Physiological (EEG, EOG) | Linear trend removal, power spectral density (PSD) | Hypovigilance | Mean test error 26–32% for subjective and objective labels |
| [47] | EEG, forehead EOG | Double layered neural network with subnetwork nodes (DNNSN) | vigilance | RMSE/COR 0.11/0.79, 0.12/0.74, 0.08/0.86 |
| [48] | EOG | Fuzzy logic | Drowsiness | Drowsy state: mean-74.18, SD-59.53425, alert state: mean-57, SD-14.70654 |
| Proposed method | Physiological (EOG) | Feature reduction/fusion techniques (PCA) | Normal, fatigue, visual and cognitive inattention, drowsiness | Hypovigilance detection–90.9% accuracy, 79.8% sensitivity, 93.5% specificity, 81.6% precision, 9.1% error rate |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Murugan, S.; Sivakumar, P.K.; Kavitha, C.; Harichandran, A.; Lai, W.-C. An Electro-Oculogram (EOG) Sensor’s Ability to Detect Driver Hypovigilance Using Machine Learning. Sensors 2023, 23, 2944. https://doi.org/10.3390/s23062944
Murugan S, Sivakumar PK, Kavitha C, Harichandran A, Lai W-C. An Electro-Oculogram (EOG) Sensor’s Ability to Detect Driver Hypovigilance Using Machine Learning. Sensors. 2023; 23(6):2944. https://doi.org/10.3390/s23062944
Chicago/Turabian StyleMurugan, Suganiya, Pradeep Kumar Sivakumar, C. Kavitha, Anandhi Harichandran, and Wen-Cheng Lai. 2023. "An Electro-Oculogram (EOG) Sensor’s Ability to Detect Driver Hypovigilance Using Machine Learning" Sensors 23, no. 6: 2944. https://doi.org/10.3390/s23062944