
EEG-Based BCIs on Motor Imagery Paradigm Using Wearable Technologies: A Systematic Review


Abstract
:1. Introduction
RQ: Are wearable technologies mature for EEG-based MI-BCI applications in uncontrolled environments?
- RQ1: Is there a significant amount of EEG-based MI-BCI studies using wearable technologies in the literature that implies a promising future development of this research field, especially in uncontrolled environments and outside the medical and clinical settings?
- RQ2: Are there common pipelines of processing that can be adopted from signal acquisition to feedback generation?
- RQ3: Are there consolidated experimental paradigms for wearable EEG-based MI-BCI applications?
- RQ4: Are there datasets available for the research community to properly compare classification models and data analysis?
2. Systematic Review Search Method
2.1. Eligibility Criteria
- Studies published in the last 10 years (from 1 January 2012 to 22 June 2022);
- Studies published as journal articles, conference proceedings, and dataset reports.
- Non-English articles;
- Studies published as meeting abstracts, book chapters, posters, reviews, and Master’s and PhD dissertations.
2.2. Information Sources
2.3. Search Strategy
- A mean (std) of 4.76% (4.98%) works of the EEG and BCI search are present in the EEG and BCI and wearable field;
- A mean (std) of 26.01% (9.38%) works of the EEG and BCI search are present in the EEG and BCI and MI field;
- A mean (std) of 0.71% (0.65%) works of the EEG and BCI search are present in the EEG and BCI and wearable and MI field, the target of the present survey.
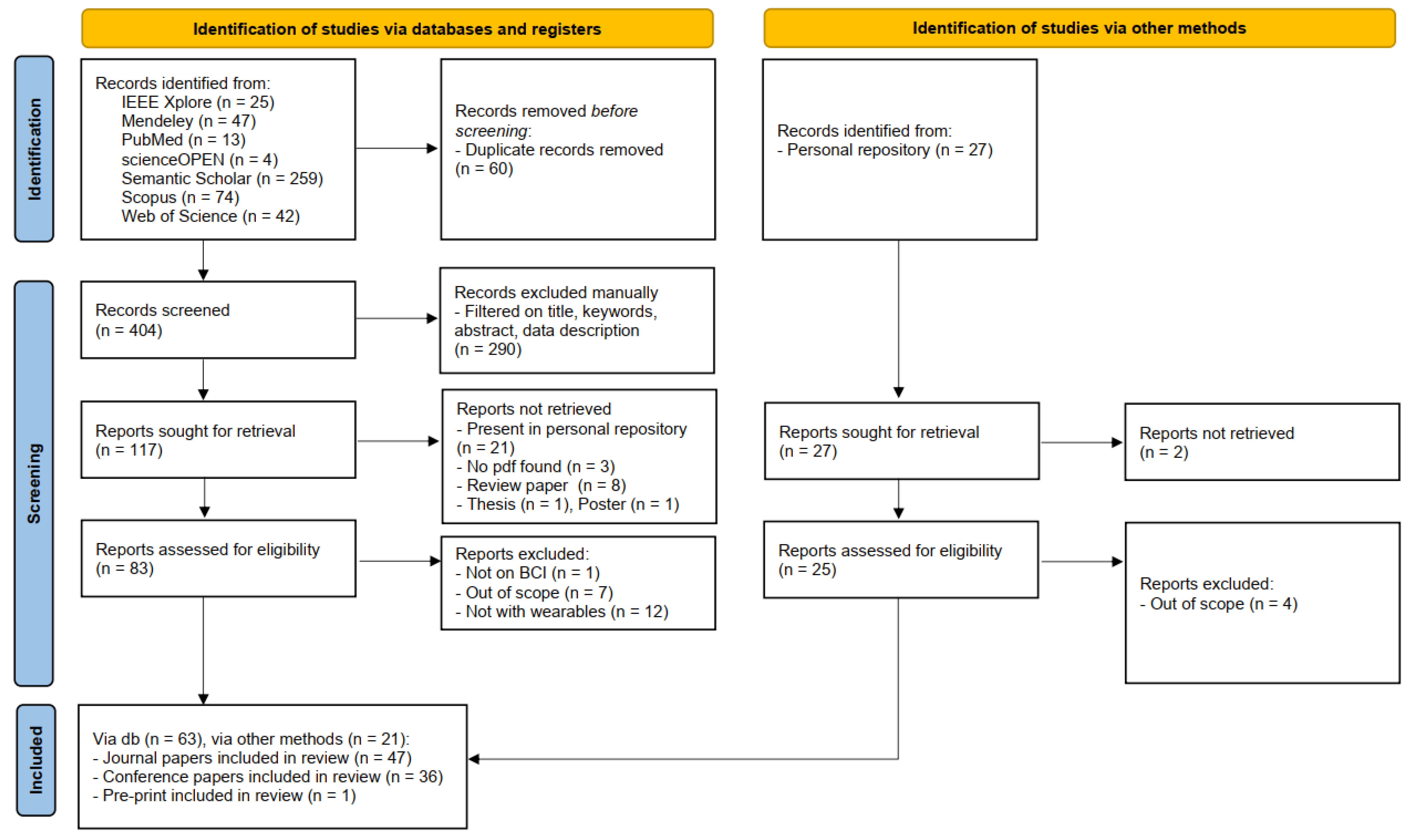
2.4. Search Outcome
3. Background Information
3.1. Electroencephalogram
- being non-stationary signals varying across time [18];
- being subject-specific, due to the natural physiological differences between subjects [16];
- varying in the same subject depending on their physiological and psychological conditions, and changing from trial to trial [19];
3.1.1. EEG Rhythms
3.2. Motor Imagery
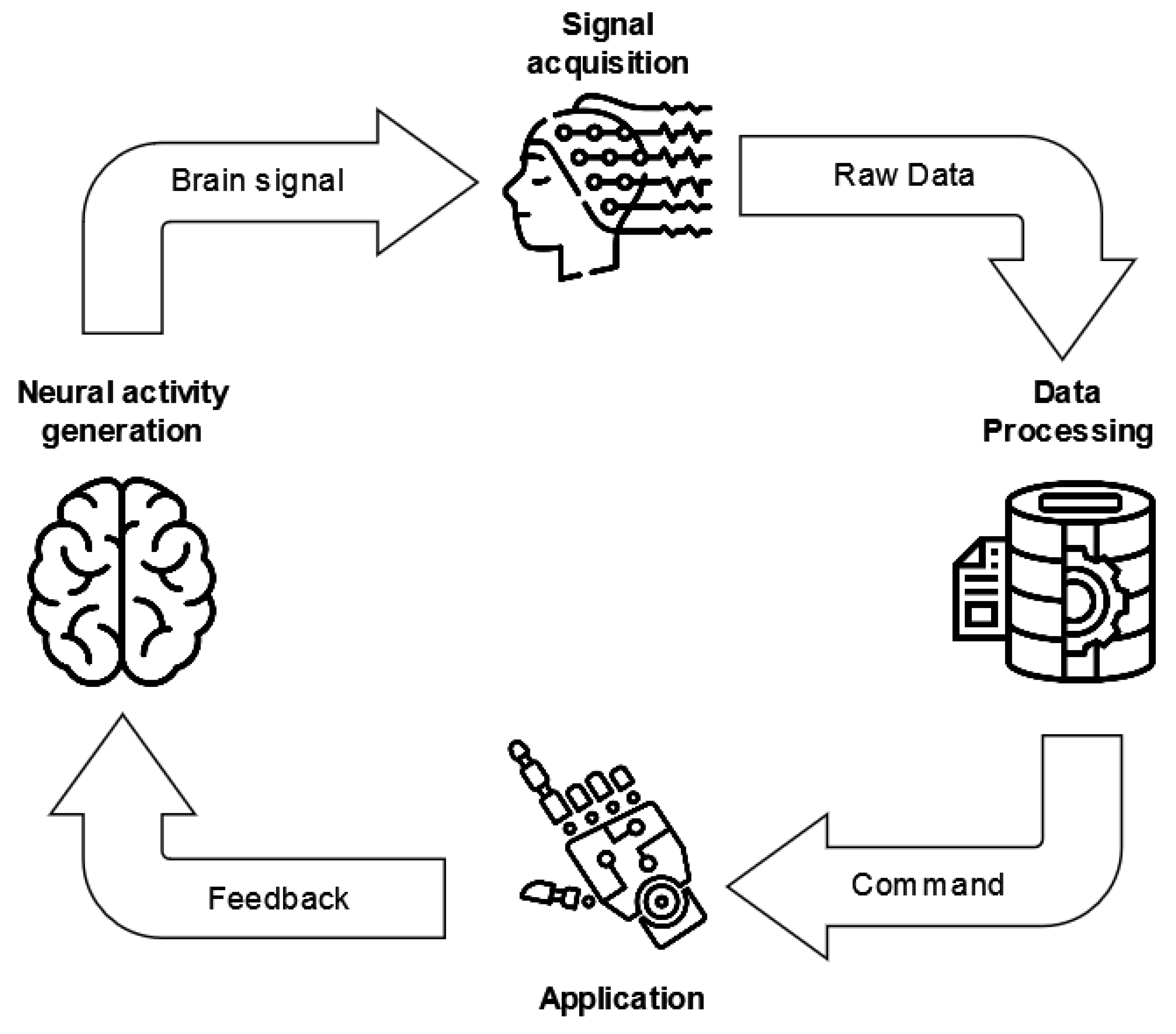
3.3. Brain–Computer Interfaces
3.4. Wearable Technologies
the evolution of ambulatory EEG units from the bulky, limited lifetime devices available today to small devices present only on the head that can record EEG for days, weeks, or months at a time.
4. Overview of Survey Articles on EEG-Based BCIs
5. EEG-Based MI-BCIs through Wearable Systems
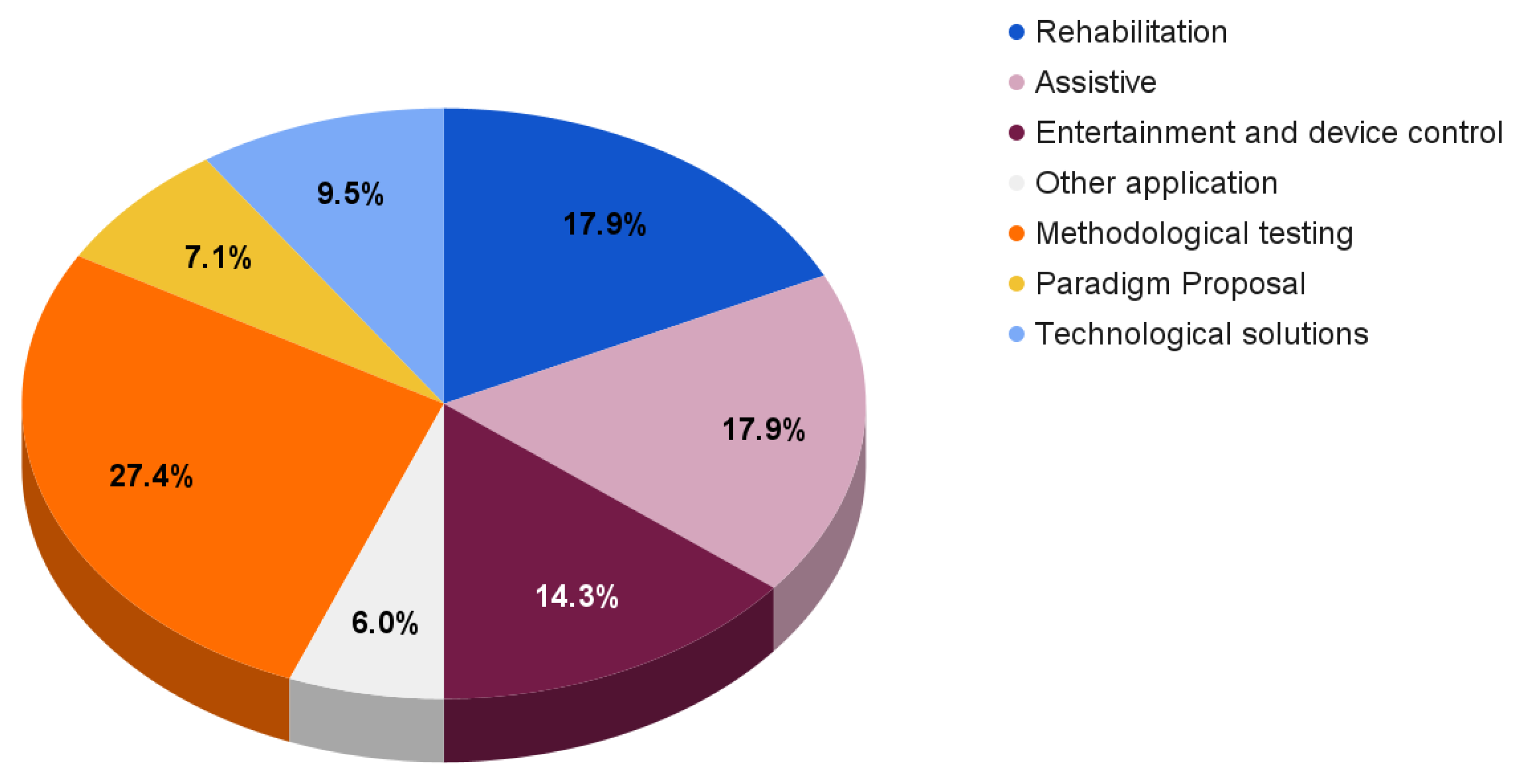
5.1. BCI Application and Feedback
5.2. Employed Technologies
5.3. Signal Processing and Analysis
5.3.1. EEG Data Preprocessing
- Nine works assumed that source signals are statistically independent of each other and instantaneously mixed, and apply Independent Component Analysis (ICA) to remove noise, mainly due to eye movements and eye blinks [93,95,103,141,147,150,152,158,171]. EEGLAB toolbox [195] is frequently employed by the authors to implement ICA;
- A number of 11 works applied temporal filtering approaches such as Butterworth of different orders and cutoffs: third order filter in 0.5–30 Hz [148] or in 4–33 Hz [123], fourth order in 16–24 Hz [88], fifth order in 8–30 Hz [96,114,132,142,143] or in 1–400 Hz [113], biquad tweaked Butterworth in 8–13 Hz [138], and sixth order in 8–30 Hz [153];
5.3.2. Feature Engineering
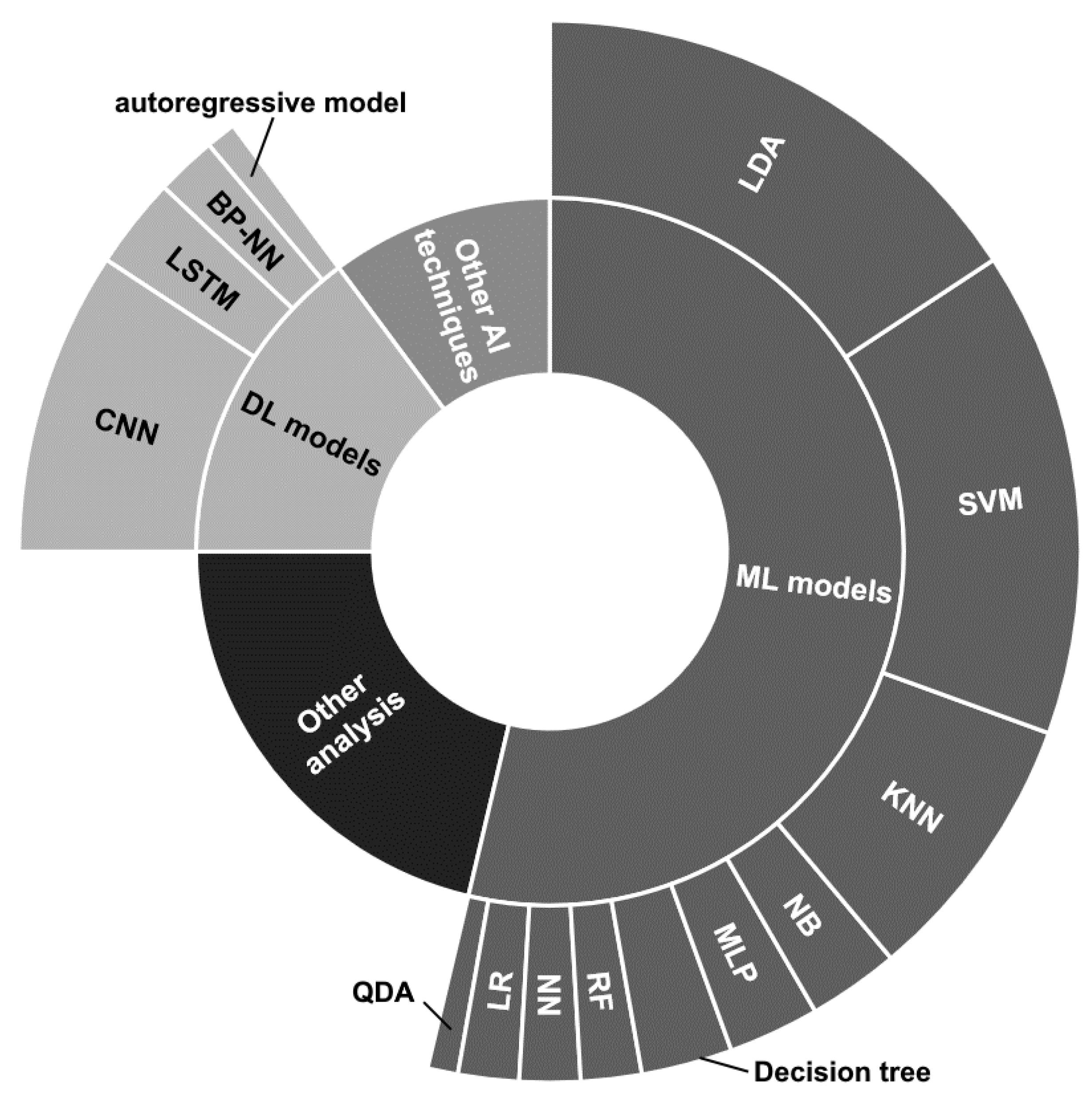
5.3.3. Classification and Data Analysis
- Questionnaire analyses have also been performed for quality assessment, by considering the opinions given by the subjects concerning a specific device [97], or employing the Quebec User Evaluation of Satisfaction with Assistive Technology test to evaluate patients’ satisfaction [88] and for subject MI ability assessment [113];
5.4. Dataset and Experimental Paradigms
- A total of 7/79 papers do not provide any information regarding the involved subjects;
- A total of 36/79 papers specify the biological gender of the subjects and report most of the time the number of subjects divided per male and female;
- A total of 50/79 papers recruited healthy subjects, while only 5 considered patients affected by specific pathologies;
- A total of 21/79 papers present information regarding the previous experience of the subjects with EEG, BCI, or MI-based experiments;
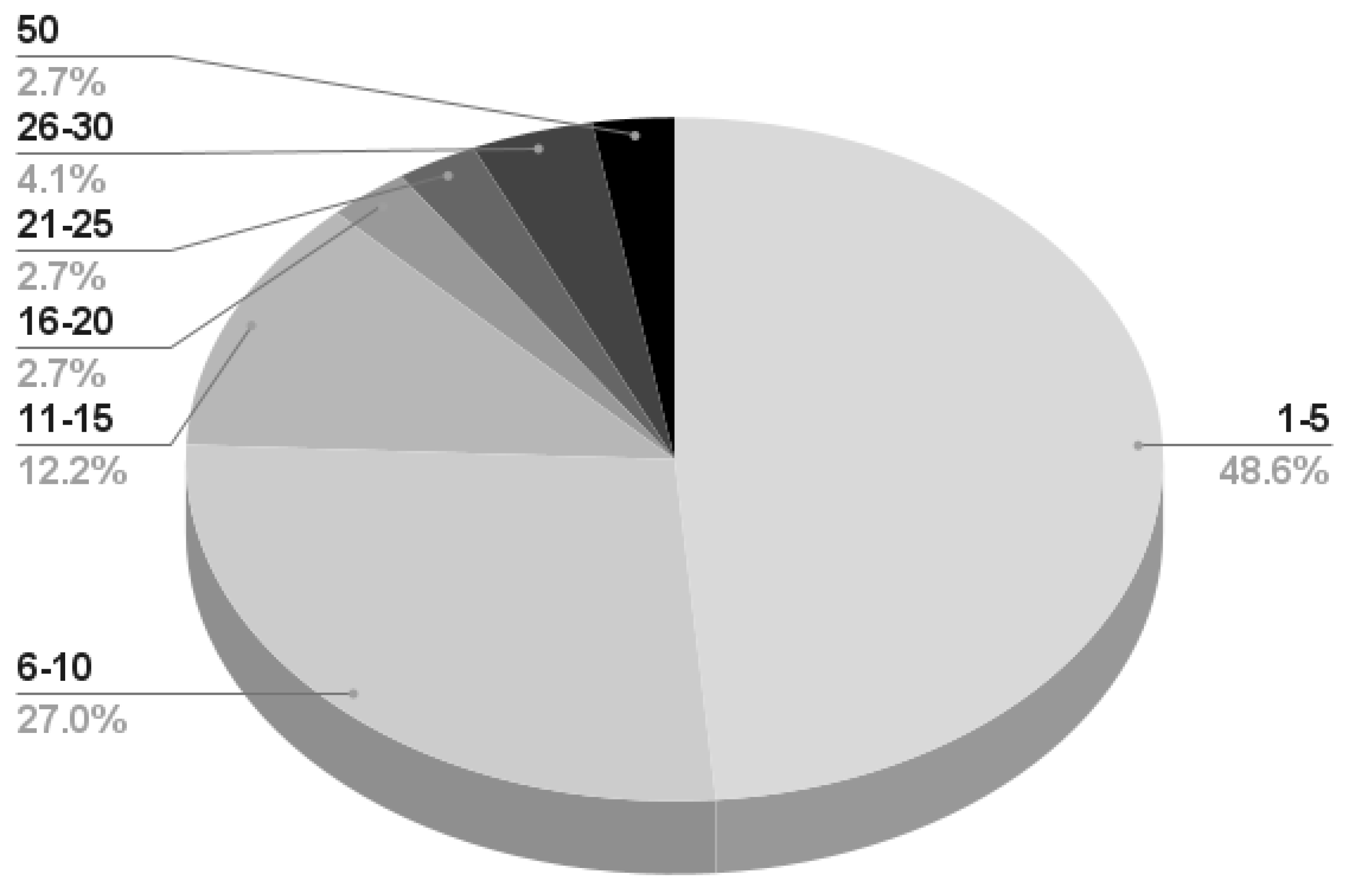
- Almost 50% of the works reporting information on the subjects perform their experiment on a maximum of 5 participants; 27% recruit a maximum of 10 subjects, and very few works consider more than 20 participants. A detailed infographic is depicted in Figure 8.
5.4.1. BCI Competition III Dataset IIIa
5.4.2. BCI Competition III Dataset IVa
5.4.3. BCI Competition IV Dataset 2a
5.4.4. BCI Competition IV Dataset 2b
5.4.5. EEG Motor Movement/Imagery Dataset
5.4.6. MI-OpenBCI
5.4.7. EEG BCI Dataset
6. Discussion
Are wearable technologies mature for EEG-based MI-BCI applications in uncontrolled environments?
by analyzing the results obtained through the extensive search initially performed considering different EEG, MI, and BCI related keyword combinations (Section 2.3) detailed in Table 2 and the final paper pool identified through the PRISMA flow (Figure 1).RQ1: Is there a significant amount of EEG-based MI-BCI studies using wearable technologies in the literature that implies a promising future development of this research field, especially in uncontrolled environments and outside the medical and clinical settings?
RQ2: Are there common pipelines of processing that can be adopted from signal acquisition to feedback generation?
notice that the experimental paradigm adopted by most of the considered works (39 out of 84) concerns MI of left/right hand/fist movement. However a high number of different types of other MI paradigms are considered: single hand/both hands, foot/feet or tongue movement, shoulder flexion, extension and abduction, the motion of upper/lower limbs, pedaling, game character/robot/machinery movement control or generic motor intention and even the imagination of cognitive tasks. Moreover, single task duration, task order, administration modality, and experimental settings are also very heterogeneous.RQ3: Are there consolidated experimental paradigms for wearable EEG-based MI-BCI applications?
RQ4: Are there datasets available for the research community to properly compare classification models and data analysis?
7. Conclusions and Future Perspectives
The ultimate goal toward smart wearable sensing with edge computing capabilities relies on a bespoke platform embedding sensors, front-end circuit interface, neuromorphic processor and memristive devices.
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| 1DMSCNN | One-Dimensional Multi-Scale Convolutional Neural Network |
| AI | Artificial intelligence |
| ANN | Artificial neural network |
| AUC | Area Under the Curve |
| BCI | Brain–computer interface |
| CAR | Common Average Reference |
| CNN | Convolutional neural network |
| CSP | Common Spatial Pattern |
| DBN | Deep Belief Network |
| DL | Deep learning |
| ECG | Electrocardiogram |
| ECoG | Electrocorticography |
| EEG | Electroencephalography |
| EMG | Electromyography |
| EOG | Electrooculography |
| ERD | Event-Related Desynchronization |
| ERP | Event-Related Potentials |
| ErrP | Error-Related Potential |
| ERS | Event-Related Synchronization |
| FFT | Fast Fourier Transform |
| FGMDRM | Framework with filter geodesic minimum distance to Riemannian mean |
| FMRI | Functional Magnetic Resonance Imaging |
| ICA | Independent Component Analysis |
| KNN | K-Nearest Neighbor |
| LDA | Linear Discriminant Analysis |
| LPA | Left pre-auricolar point |
| LR | Logistic Regression |
| LSTM | Long-Short Term Memory |
| MI | Motor imagery |
| ML | Machine Learning |
| MLP | Multi-Layer Perceptron |
| MSCNN | Multi-Scale Convolutional Neural Network |
| NB | Naive Bayes |
| NN | Neural network |
| PRISMA | Preferred Reporting Items for Systematic Reviews and Meta-Analyses |
| PSD | Power Spectral Density |
| PTFBCSP | Penalized Time–Frequency Band Common Spatial Pattern |
| QDA | Quadratic Discriminant Analysis |
| RF | Random forest |
| RNN | Recurrent neural network |
| RPA | Right pre-auricolar point |
| RQ | Research question |
| SJGDA | Semisupervised Joint mutual information with General Discriminate Analysis |
| SNR | Signal to Noise Ratio |
| SSDT | Subject specific decision tree |
| SSVEP | Steady-state visual evoked potential |
| SVM | Support vector machine |
| TES | Transcranial electrical stimulation |
| VR | Virtual reality |
| XGBoost | Extreme Gradient Boosting |
References
- Millett, D. Hans Berger: From psychic energy to the EEG. Perspect. Biol. Med. 2001, 44, 522–542. [Google Scholar] [CrossRef] [PubMed]
- Shih, J.J.; Krusienski, D.J.; Wolpaw, J.R. Brain-computer interfaces in medicine. Mayo Clin. Proc. 2012, 87, 268–279. [Google Scholar] [CrossRef] [Green Version]
- Kögel, J.; Schmid, J.R.; Jox, R.J.; Friedrich, O. Using brain–computer interfaces: A scoping review of studies employing social research methods. BMC Med. Ethics 2019, 20, 1–17. [Google Scholar] [CrossRef] [PubMed]
- Al-Saegh, A.; Dawwd, S.A.; Abdul-Jabbar, J.M. Deep learning for motor imagery EEG-based classification: A review. Biomed. Signal Process. Control 2021, 63, 102172. [Google Scholar] [CrossRef]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. Syst. Rev. 2021, 10, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Srinivasan, R.; Nunez, P. Electroencephalography. In Encyclopedia of Human Behavior, 2nd ed.; Ramachandran, V., Ed.; Academic Press: San Diego, CA, USA, 2012; pp. 15–23. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Yin, Z.; Chen, P.; Nichele, S. Emotion recognition using multi-modal data and machine learning techniques: A tutorial and review. Inf. Fusion 2020, 59, 103–126. [Google Scholar] [CrossRef]
- Rojas, G.M.; Alvarez, C.; Montoya, C.E.; de la Iglesia-Vayá, M.; Cisternas, J.E.; Gálvez, M. Study of resting-state functional connectivity networks using EEG electrodes position as seed. Front. Neurosci. 2018, 12, 235. [Google Scholar] [CrossRef] [Green Version]
- Craik, A.; He, Y.; Contreras-Vidal, J.L. Deep learning for electroencephalogram (EEG) classification tasks: A review. J. Neural Eng. 2019, 16, 031001. [Google Scholar] [CrossRef]
- Hosseini, M.P.; Hosseini, A.; Ahi, K. A Review on Machine Learning for EEG Signal Processing in Bioengineering. IEEE Rev. Biomed. Eng. 2020, 14, 204–218. [Google Scholar] [CrossRef]
- LaRocco, J.; Le, M.D.; Paeng, D.G. A systemic review of available low-cost EEG headsets used for drowsiness detection. Front. Neuroinform. 2020, 14, 553352. [Google Scholar] [CrossRef]
- Wan, X.; Zhang, K.; Ramkumar, S.; Deny, J.; Emayavaramban, G.; Ramkumar, M.S.; Hussein, A.F. A review on electroencephalogram based brain computer interface for elderly disabled. IEEE Access 2019, 7, 36380–36387. [Google Scholar] [CrossRef]
- Oostenveld, R.; Praamstra, P. The five percent electrode system for high-resolution EEG and ERP measurements. Clin. Neurophysiol. 2001, 112, 713–719. [Google Scholar] [CrossRef] [PubMed]
- Paranjape, R.; Mahovsky, J.; Benedicenti, L.; Koles, Z. The electroencephalogram as a biometric. In Proceedings of the Canadian Conference on Electrical and Computer Engineering 2001. Conference Proceedings (Cat. No. 01TH8555), Toronto, ON, Canada, 13–16 May 2001; IEEE: Piscataway, NJ, USA, 2001; Volume 2, pp. 1363–1366. [Google Scholar]
- Xygonakis, I.; Athanasiou, A.; Pandria, N.; Kugiumtzis, D.; Bamidis, P.D. Decoding motor imagery through common spatial pattern filters at the EEG source space. Comput. Intell. Neurosci. 2018, 2018, 7957408. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Roy, Y.; Banville, H.; Albuquerque, I.; Gramfort, A.; Falk, T.H.; Faubert, J. Deep learning-based electroencephalography analysis: A systematic review. J. Neural Eng. 2019, 16, 051001. [Google Scholar] [CrossRef] [PubMed]
- Bigdely-Shamlo, N.; Mullen, T.; Kothe, C.; Su, K.M.; Robbins, K.A. The PREP pipeline: Standardized preprocessing for large-scale EEG analysis. Front. Neuroinform. 2015, 9, 16. [Google Scholar] [CrossRef]
- Gramfort, A.; Strohmeier, D.; Haueisen, J.; Hämäläinen, M.S.; Kowalski, M. Time-frequency mixed-norm estimates: Sparse M/EEG imaging with non-stationary source activations. NeuroImage 2013, 70, 410–422. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.; Choi, S. Group nonnegative matrix factorization for EEG classification. In Proceedings of the Artificial Intelligence and Statistics, Virtual, 16–18 April 2009; pp. 320–327. [Google Scholar]
- Zhang, D.; Yao, L.; Chen, K.; Wang, S.; Chang, X.; Liu, Y. Making sense of spatio-temporal preserving representations for EEG-based human intention recognition. IEEE Trans. Cybern. 2019, 50, 3033–3044. [Google Scholar] [CrossRef]
- Vaid, S.; Singh, P.; Kaur, C. EEG signal analysis for BCI interface: A review. In Proceedings of the 2015 fifth International Conference on Advanced Computing & Communication Technologies, Washington, DC, USA, 21–22 February 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 143–147. [Google Scholar]
- Blinowska, K.; Durka, P. Electroencephalography (eeg). In Wiley Encyclopedia of Biomedical Engineering; Wiley: Hoboken, NJ, USA, 2006. [Google Scholar]
- McFarland, D.J.; Miner, L.A.; Vaughan, T.M.; Wolpaw, J.R. Mu and beta rhythm topographies during motor imagery and actual movements. Brain Topogr. 2000, 12, 177–186. [Google Scholar] [CrossRef]
- Decety, J. The neurophysiological basis of motor imagery. Behav. Brain Res. 1996, 77, 45–52. [Google Scholar] [CrossRef]
- Beisteiner, R.; Höllinger, P.; Lindinger, G.; Lang, W.; Berthoz, A. Mental representations of movements. Brain potentials associated with imagination of hand movements. Electroencephalogr. Clin. Neurophysiol. Potentials Sect. 1995, 96, 183–193. [Google Scholar] [CrossRef]
- Jeannerod, M. Mental imagery in the motor context. Neuropsychologia 1995, 33, 1419–1432. [Google Scholar] [CrossRef] [PubMed]
- Lotze, M.; Halsband, U. Motor imagery. J.-Physiol.-Paris 2006, 99, 386–395. [Google Scholar] [CrossRef] [PubMed]
- McAvinue, L.P.; Robertson, I.H. Measuring motor imagery ability: A review. Eur. J. Cogn. Psychol. 2008, 20, 232–251. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Neuper, C. Motor imagery activates primary sensorimotor area in humans. Neurosci. Lett. 1997, 239, 65–68. [Google Scholar] [CrossRef] [PubMed]
- Jeon, Y.; Nam, C.S.; Kim, Y.J.; Whang, M.C. Event-related (De) synchronization (ERD/ERS) during motor imagery tasks: Implications for brain–computer interfaces. Int. J. Ind. Ergon. 2011, 41, 428–436. [Google Scholar] [CrossRef]
- Munzert, J.; Lorey, B.; Zentgraf, K. Cognitive motor processes: The role of motor imagery in the study of motor representations. Brain Res. Rev. 2009, 60, 306–326. [Google Scholar] [CrossRef] [PubMed]
- Dose, H.; Møller, J.S.; Iversen, H.K.; Puthusserypady, S. An end-to-end deep learning approach to MI-EEG signal classification for BCIs. Expert Syst. Appl. 2018, 114, 532–542. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Da Silva, F.L. Event-related EEG/MEG synchronization and desynchronization: Basic principles. Clin. Neurophysiol. 1999, 110, 1842–1857. [Google Scholar] [CrossRef]
- Pfurtscheller, G.; Brunner, C.; Schlögl, A.; Da Silva, F.L. Mu rhythm (de) synchronization and EEG single-trial classification of different motor imagery tasks. NeuroImage 2006, 31, 153–159. [Google Scholar] [CrossRef]
- Nam, C.S.; Jeon, Y.; Kim, Y.J.; Lee, I.; Park, K. Movement imagery-related lateralization of event-related (de) synchronization (ERD/ERS): Motor-imagery duration effects. Clin. Neurophysiol. 2011, 122, 567–577. [Google Scholar] [CrossRef]
- Dai, M.; Zheng, D.; Na, R.; Wang, S.; Zhang, S. EEG classification of motor imagery using a novel deep learning framework. Sensors 2019, 19, 551. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wriessnegger, S.C.; Brunner, C.; Müller-Putz, G.R. Frequency specific cortical dynamics during motor imagery are influenced by prior physical activity. Front. Psychol. 2018, 9, 1976. [Google Scholar] [CrossRef] [PubMed]
- Demarin, V.; Morović, S. Neuroplasticity. Period. Biol. 2014, 116, 209–211. [Google Scholar]
- Kaiser, V.; Bauernfeind, G.; Kreilinger, A.; Kaufmann, T.; Kübler, A.; Neuper, C.; Müller-Putz, G.R. Cortical effects of user training in a motor imagery based brain–computer interface measured by fNIRS and EEG. Neuroimage 2014, 85, 432–444. [Google Scholar] [CrossRef] [PubMed]
- Reaves, J.; Flavin, T.; Mitra, B.; Mahantesh, K.; Nagaraju, V. Assessment Furthermore, Application of EEG: A Literature Review. Appl. Bioinf. Comput. Biol. 2021, 7, 2. [Google Scholar]
- Wolpaw, J.R.; Birbaumer, N.; McFarland, D.J.; Pfurtscheller, G.; Vaughan, T.M. Brain–computer interfaces for communication and control. Clin. Neurophysiol. 2002, 113, 767–791. [Google Scholar] [CrossRef] [PubMed]
- Schalk, G.; McFarland, D.J.; Hinterberger, T.; Birbaumer, N.; Wolpaw, J.R. BCI2000: A general-purpose brain–computer interface (BCI) system. IEEE Trans. Biomed. Eng. 2004, 51, 1034–1043. [Google Scholar] [CrossRef]
- Aggarwal, S.; Chugh, N. Signal processing techniques for motor imagery brain computer interface: A review. Array 2019, 1, 100003. [Google Scholar] [CrossRef]
- Abiri, R.; Borhani, S.; Sellers, E.W.; Jiang, Y.; Zhao, X. A comprehensive review of EEG-based brain–computer interface paradigms. J. Neural Eng. 2019, 16, 011001. [Google Scholar] [CrossRef]
- Gasparini, F.; Cazzaniga, E.; Saibene, A. Inner speech recognition through electroencephalographic signals. arXiv 2022, arXiv:2210.06472. [Google Scholar]
- Ramele, R.; Villar, A.J.; Santos, J.M. EEG Waveform Analysis of P300 ERP with Applications to Brain Computer Interfaces. Brain Sci. 2018, 8, 199. [Google Scholar] [CrossRef] [Green Version]
- Friman, O.; Volosyak, I.; Graser, A. Multiple Channel Detection of Steady-State Visual Evoked Potentials for Brain-Computer Interfaces. IEEE Trans. Biomed. Eng. 2007, 54, 742–750. [Google Scholar] [CrossRef] [PubMed]
- Baek, H.J.; Chang, M.H.; Heo, J.; Park, K.S. Enhancing the Usability of Brain-Computer Interface Systems. Comput. Intell. Neurosci. 2019, 2019, 12. [Google Scholar] [CrossRef] [PubMed]
- Bhattacharyya, S.; Konar, A.; Tibarewala, D.N. Motor imagery and error related potential induced position control of a robotic arm. IEEE/CAA J. Autom. Sin. 2017, 4, 639–650. [Google Scholar] [CrossRef]
- Kawala-Sterniuk, A.; Browarska, N.; Al-Bakri, A.; Pelc, M.; Zygarlicki, J.; Sidikova, M.; Martinek, R.; Gorzelanczyk, E.J. Summary of over fifty years with brain–computer interfaces—A review. Brain Sci. 2021, 11, 43. [Google Scholar] [CrossRef]
- Xu, M.; Han, J.; Wang, Y.; Jung, T.P.; Ming, D. Implementing over 100 command codes for a high-speed hybrid brain–computer interface using concurrent P300 and SSVEP features. IEEE Trans. Biomed. Eng. 2020, 67, 3073–3082. [Google Scholar] [CrossRef]
- Ma, T.; Li, H.; Deng, L.; Yang, H.; Lv, X.; Li, P.; Li, F.; Zhang, R.; Liu, T.; Yao, D.; et al. The hybrid BCI system for movement control by combining motor imagery and moving onset visual evoked potential. J. Neural Eng. 2017, 14, 026015. [Google Scholar] [CrossRef]
- Duan, F.; Lin, D.; Li, W.; Zhang, Z. Design of a multimodal EEG-based hybrid BCI system with visual servo module. IEEE Trans. Auton. Ment. Dev. 2015, 7, 332–341. [Google Scholar] [CrossRef]
- Mane, R.; Chouhan, T.; Guan, C. BCI for stroke rehabilitation: Motor and beyond. J. Neural Eng. 2020, 17, 041001. [Google Scholar] [CrossRef]
- Khan, M.A.; Das, R.; Iversen, H.K.; Puthusserypady, S. Review on motor imagery based BCI systems for upper limb post-stroke neurorehabilitation: From designing to application. Comput. Biol. Med. 2020, 123, 103843. [Google Scholar] [CrossRef]
- Yang, S.; Li, R.; Li, H.; Xu, K.; Shi, Y.; Wang, Q.; Yang, T.; Sun, X. Exploring the Use of Brain-Computer Interfaces in Stroke Neurorehabilitation. BioMed Res. Int. 2021, 2021, 12. [Google Scholar] [CrossRef] [PubMed]
- Möller, J.C.; Zutter, D.; Riener, R. Technology-Based Neurorehabilitation in Parkinson’s Disease – A Narrative Review. Clin. Transl. Neurosci. 2021, 5, 23. [Google Scholar] [CrossRef]
- Miladinović, A.; Ajčević, M.; Busan, P.; Jarmolowska, J.; Silveri, G.; Deodato, M.; Mezzarobba, S.; Battaglini, P.P.; Accardo, A. Evaluation of Motor Imagery-Based BCI methods in neurorehabilitation of Parkinson’s Disease patients. In Proceedings of the 2020 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Montreal, QC, Canada, 20–24 July 2020; pp. 3058–3061. [Google Scholar] [CrossRef]
- Abdulkader, S.N.; Atia, A.; Mostafa, M.S.M. Brain computer interfacing: Applications and challenges. Egypt. Inform. J. 2015, 16, 213–230. [Google Scholar] [CrossRef] [Green Version]
- Kerous, B.; Skola, F.; Liarokapis, F. EEG-based BCI and video games: A progress report. Virtual Real. 2018, 22, 119–135. [Google Scholar] [CrossRef]
- Sanchez-Fraire, U.; Parra-Vega, V.; Martinez-Peon, D.; Sepúlveda-Cervantes, G.; Sánchez-Orta, A.; Muñoz-Vázquez, A.J. On the brain computer robot interface (bcri) to control robots. IFAC-PapersOnLine 2015, 48, 154–159. [Google Scholar] [CrossRef]
- Perrin, X.; Chavarriaga, R.; Colas, F.; Siegwart, R.; Millán, J.d.R. Brain-coupled interaction for semi-autonomous navigation of an assistive robot. Robot. Auton. Syst. 2010, 58, 1246–1255. [Google Scholar] [CrossRef] [Green Version]
- Balderas, D.; Ponce, P.; Lopez-Bernal, D.; Molina, A. Education 4.0: Teaching the Basis of Motor Imagery Classification Algorithms for Brain-Computer Interfaces. Future Internet 2021, 13, 202. [Google Scholar] [CrossRef]
- Myrden, A.; Chau, T. A passive EEG-BCI for single-trial detection of changes in mental state. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 345–356. [Google Scholar] [CrossRef]
- Wolpaw, J.R. Brain–computer interfaces. In Handbook of Clinical Neurology; Elsevier: Amsterdam, The Netherlands, 2013; Volume 110, pp. 67–74. [Google Scholar]
- Fiedler, P.; Fonseca, C.; Supriyanto, E.; Zanow, F.; Haueisen, J. A high-density 256-channel cap for dry electroencephalography. Human Brain Mapping 2022, 43, 1295–1308. [Google Scholar] [CrossRef]
- Casson, A.J.; Yates, D.C.; Smith, S.J.; Duncan, J.S.; Rodriguez-Villegas, E. Wearable electroencephalography. IEEE Eng. Med. Biol. Mag. 2010, 29, 44–56. [Google Scholar] [CrossRef] [Green Version]
- Soufineyestani, M.; Dowling, D.; Khan, A. Electroencephalography (EEG) technology applications and available devices. Appl. Sci. 2020, 10, 7453. [Google Scholar] [CrossRef]
- Hu, L.; Zhang, Z. EEG Signal Processing and Feature Extraction; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Li, G.L.; Wu, J.T.; Xia, Y.H.; He, Q.G.; Jin, H.G. Review of semi-dry electrodes for EEG recording. J. Neural Eng. 2020, 17, 051004. [Google Scholar] [CrossRef] [PubMed]
- Casson, A.J. Wearable EEG and beyond. Biomed. Eng. Lett. 2019, 9, 53–71. [Google Scholar] [CrossRef]
- Mihajlović, V.; Grundlehner, B.; Vullers, R.; Penders, J. Wearable, wireless EEG solutions in daily life applications: What are we missing? IEEE J. Biomed. Health Inform. 2014, 19, 6–21. [Google Scholar] [CrossRef]
- Blum, S.; Emkes, R.; Minow, F.; Anlauff, J.; Finke, A.; Debener, S. Flex-printed forehead EEG sensors (fEEGrid) for long-term EEG acquisition. J. Neural Eng. 2020, 17, 034003. [Google Scholar] [CrossRef] [PubMed]
- You, S.; Cho, B.H.; Yook, S.; Kim, J.Y.; Shon, Y.M.; Seo, D.W.; Kim, I.Y. Unsupervised automatic seizure detection for focal-onset seizures recorded with behind-the-ear EEG using an anomaly-detecting generative adversarial network. Comput. Methods Programs Biomed. 2020, 193, 105472. [Google Scholar] [CrossRef] [PubMed]
- Do Valle, B.G.; Cash, S.S.; Sodini, C.G. Wireless behind-the-ear EEG recording device with wireless interface to a mobile device (iPhone/iPod touch). In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 26–30 August 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 5952–5955. [Google Scholar]
- Wang, Y.; Yin, L.; Bai, Y.; Liu, S.; Wang, L.; Zhou, Y.; Hou, C.; Yang, Z.; Wu, H.; Ma, J.; et al. Electrically compensated, tattoo-like electrodes for epidermal electrophysiology at scale. Sci. Adv. 2020, 6, eabd0996. [Google Scholar] [CrossRef]
- Wang, H.; Wang, J.; Chen, D.; Ge, S.; Liu, Y.; Wang, Z.; Zhang, X.; Guo, Q.; Yang, J. Robust tattoo electrode prepared by paper-assisted water transfer printing for wearable health monitoring. IEEE Sens. J. 2022, 22, 3817–3827. [Google Scholar] [CrossRef]
- Casson, A.J.; Abdulaal, M.; Dulabh, M.; Kohli, S.; Krachunov, S.; Trimble, E. Electroencephalogram. In Seamless Healthcare Monitoring; Springer: Berlin/Heidelberg, Germany, 2018; pp. 45–81. [Google Scholar]
- Palumbo, A.; Gramigna, V.; Calabrese, B.; Ielpo, N. Motor-imagery EEG-based BCIs in wheelchair movement and control: A systematic literature review. Sensors 2021, 21, 6285. [Google Scholar] [CrossRef]
- Udovičić, G.; Topić, A.; Russo, M. Wearable technologies for smart environments: A review with emphasis on BCI. In Proceedings of the 2016 24th International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 22–24 September 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–9. [Google Scholar]
- TajDini, M.; Sokolov, V.; Kuzminykh, I.; Shiaeles, S.; Ghita, B. Wireless sensors for brain activity—A survey. Electronics 2020, 9, 2092. [Google Scholar] [CrossRef]
- Portillo-Lara, R.; Tahirbegi, B.; Chapman, C.A.; Goding, J.A.; Green, R.A. Mind the gap: State-of-the-art technologies and applications for EEG-based brain–computer interfaces. APL Bioeng. 2021, 5, 031507. [Google Scholar] [CrossRef] [PubMed]
- Jamil, N.; Belkacem, A.N.; Ouhbi, S.; Lakas, A. Noninvasive Electroencephalography Equipment for Assistive, Adaptive, and Rehabilitative Brain–Computer Interfaces: A Systematic Literature Review. Sensors 2021, 21, 4754. [Google Scholar] [CrossRef] [PubMed]
- Gu, X.; Cao, Z.; Jolfaei, A.; Xu, P.; Wu, D.; Jung, T.P.; Lin, C.T. EEG-based brain–computer interfaces (BCIs): A survey of recent studies on signal sensing technologies and computational intelligence approaches and their applications. IEEE/ACM Trans. Comput. Biol. Bioinform. 2021, 18, 1645–1666. [Google Scholar] [CrossRef] [PubMed]
- Neuper, C.; Pfurtscheller, G. Neurofeedback training for BCI control. In Brain-Computer Interfaces; Springer: Berlin/Heidelberg, Germany, 2009; pp. 65–78. [Google Scholar]
- Jiang, Y.; Hau, N.T.; Chung, W.Y. Semiasynchronous BCI using wearable two-channel EEG. IEEE Trans. Cogn. Dev. Syst. 2017, 10, 681–686. [Google Scholar] [CrossRef]
- Mattia, D.; Pichiorri, F.; Colamarino, E.; Masciullo, M.; Morone, G.; Toppi, J.; Pisotta, I.; Tamburella, F.; Lorusso, M.; Paolucci, S.; et al. The Promotoer, a brain–computer interface-assisted intervention to promote upper limb functional motor recovery after stroke: A study protocol for a randomized controlled trial to test early and long-term efficacy and to identify determinants of response. BMC Neurol. 2020, 20, 254. [Google Scholar] [CrossRef]
- Barria, P.; Pino, A.; Tovar, N.; Gomez-Vargas, D.; Baleta, K.; Díaz, C.A.; Múnera, M.; Cifuentes, C.A. BCI-Based Control for Ankle Exoskeleton T-FLEX: Comparison of Visual and Haptic Stimuli with Stroke Survivors. Sensors 2021, 21, 6431. [Google Scholar] [CrossRef]
- Karakullukcu, N.; Yilmaz, B. Detection of Movement Intention in EEG-Based Brain-Computer Interfaces Using Fourier-Based Synchrosqueezing Transform. Int. J. Neural Syst. 2022, 32, 2150059. [Google Scholar] [CrossRef]
- Du Bois, N.; Bigirimana, A.D.; Korik, A.; Kéthina, L.G.; Rutembesa, E.; Mutabaruka, J.; Mutesa, L.; Prasad, G.; Jansen, S.; Coyle, D. Neurofeedback with low-cost, wearable electroencephalography (EEG) reduces symptoms in chronic Post-Traumatic Stress Disorder. J. Affect. Disord. 2021, 295, 1319–1334. [Google Scholar] [CrossRef]
- Looned, R.; Webb, J.; Xiao, Z.G.; Menon, C. Assisting drinking with an affordable BCI-controlled wearable robot and electrical stimulation: A preliminary investigation. J. Neuroeng. Rehabil. 2014, 11, 51. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Yuan, Y.; Luo, L.; Su, W.; Zhao, K.; Xu, C.; Huang, J.; Pi, M. Hybrid brain/muscle signals powered wearable walking exoskeleton enhancing motor ability in climbing stairs activity. IEEE Trans. Med. Robot. Bionics 2019, 1, 218–227. [Google Scholar] [CrossRef]
- Vourvopoulos, A.; Jorge, C.; Abreu, R.; Figueiredo, P.; Fernandes, J.C.; Bermudez i Badia, S. Efficacy and brain imaging correlates of an immersive motor imagery BCI-driven VR system for upper limb motor rehabilitation: A clinical case report. Front. Hum. Neurosci. 2019, 13, 244. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kong, W.; Fu, S.; Deng, B.; Zeng, H.; Zhang, J.; Guo, S. Embedded BCI Rehabilitation System for Stroke. J. Beijing Inst. Technol. 2019, 28, 35–41. [Google Scholar]
- Athanasiou, A.; Arfaras, G.; Xygonakis, I.; Kartsidis, P.; Pandria, N.; Kavazidi, K.R.; Astaras, A.; Foroglou, N.; Polyzoidis, K.; Bamidis, P.D. Commercial BCI Control and functional brain networks in spinal cord injury: A proof-of-concept. In Proceedings of the 2017 IEEE 30th International Symposium on Computer-Based Medical Systems (CBMS), Thessaloniki, Greece, 22–24 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 262–267. [Google Scholar]
- Simon, C.; Ruddy, K.L. A wireless, wearable Brain-Computer Interface for neurorehabilitation at home; A feasibility study. In Proceedings of the 2022 10th International Winter Conference on Brain-Computer Interface (BCI), Gangwon, Republic of Korea, 21–23 February 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–6. [Google Scholar]
- Quiles, E.; Suay, F.; Candela, G.; Chio, N.; Jiménez, M.; Álvarez-Kurogi, L. Low-cost robotic guide based on a motor imagery brain–computer interface for arm assisted rehabilitation. Int. J. Environ. Res. Public Health 2020, 17, 699. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cardoso, V.F.; Delisle-Rodriguez, D.; Romero-Laiseca, M.A.; Loterio, F.A.; Gurve, D.; Floriano, A.; Valadão, C.; Silva, L.; Krishnan, S.; Frizera-Neto, A.; et al. Effect of a Brain–Computer Interface Based on Pedaling Motor Imagery on Cortical Excitability and Connectivity. Sensors 2021, 21, 2020. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Bezerianos, A. Brain-controlled wheelchair controlled by sustained and brief motor imagery BCIs. Electron. Lett. 2017, 53, 1178–1180. [Google Scholar] [CrossRef]
- Lisi, G.; Hamaya, M.; Noda, T.; Morimoto, J. Dry-wireless EEG and asynchronous adaptive feature extraction towards a plug-and-play co-adaptive brain robot interface. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 959–966. [Google Scholar]
- Carrino, F.; Dumoulin, J.; Mugellini, E.; Abou Khaled, O.; Ingold, R. A self-paced BCI system to control an electric wheelchair: Evaluation of a commercial, low-cost EEG device. In Proceedings of the 2012 ISSNIP Biosignals and Biorobotics Conference: Biosignals and Robotics for Better and Safer Living (BRC), Manaus, Brazil, 9–11 January 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1–6. [Google Scholar]
- Gant, K.; Guerra, S.; Zimmerman, L.; Parks, B.A.; Prins, N.W.; Prasad, A. EEG-controlled functional electrical stimulation for hand opening and closing in chronic complete cervical spinal cord injury. Biomed. Phys. Eng. Express 2018, 4, 065005. [Google Scholar] [CrossRef]
- Gaxiola-Tirado, J.A.; Iáñez, E.; Ortíz, M.; Gutiérrez, D.; Azorín, J.M. Effects of an exoskeleton-assisted gait motor imagery training in functional brain connectivity. In Proceedings of the 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 429–432. [Google Scholar]
- Khan, M.J.; Hong, K.S.; Naseer, N.; Bhutta, M.R. Motor imagery performance evaluation using hybrid EEG-NIRS for BCI. In Proceedings of the 2015 54th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), Hangzhou, China, 28–30 July 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1150–1155. [Google Scholar]
- Freer, D.; Yang, G.Z. MIndGrasp: A New Training and Testing Framework for Motor Imagery Based 3-Dimensional Assistive Robotic Control. arXiv 2020, arXiv:2003.00369. [Google Scholar]
- Jameel, H.F.; Mohammed, S.L.; Gharghan, S.K. Electroencephalograph-based wheelchair controlling system for the people with motor disability using advanced brainwear. In Proceedings of the 2019 12th International Conference on Developments in eSystems Engineering (DeSE), Kazan, Russia, 7–10 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 843–848. [Google Scholar]
- Ketola, E.; Lloyd, C.; Shuhart, D.; Schmidt, J.; Morenz, R.; Khondker, A.; Imtiaz, M. Lessons Learned from the Initial Development of a Brain Controlled Assistive Device. In Proceedings of the 2022 IEEE 12th Annual Computing and Communication Workshop and Conference (CCWC), Virtual, 26–29 January 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 0580–0585. [Google Scholar]
- Permana, K.; Wijaya, S.; Prajitno, P. Controlled wheelchair based on brain computer interface using Neurosky Mindwave Mobile 2. Aip Conf. Proc. 2019, 2168, 020022. [Google Scholar]
- Priyatno, S.B.; Prakoso, T.; Riyadi, M.A. Classification of motor imagery brain wave for bionic hand movement using multilayer perceptron. Sinergi 2022, 26, 57–64. [Google Scholar] [CrossRef]
- Tang, X.; Li, W.; Li, X.; Ma, W.; Dang, X. Motor imagery EEG recognition based on conditional optimization empirical mode decomposition and multi-scale convolutional neural network. Expert Syst. Appl. 2020, 149, 113285. [Google Scholar] [CrossRef]
- Apicella, A.; Arpaia, P.; Frosolone, M.; Moccaldi, N. High-wearable EEG-based distraction detection in motor rehabilitation. Sci. Rep. 2021, 11, 5297. [Google Scholar] [CrossRef] [PubMed]
- Garcia-Moreno, F.M.; Bermudez-Edo, M.; Rodríguez-Fórtiz, M.J.; Garrido, J.L. A CNN-LSTM deep Learning classifier for motor imagery EEG detection using a low-invasive and low-Cost BCI headband. In Proceedings of the 2020 16th International Conference on Intelligent Environments (IE), Madrid, Spain, 20–23 July 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 84–91. [Google Scholar]
- Peterson, V.; Galván, C.; Hernández, H.; Spies, R. A feasibility study of a complete low-cost consumer-grade brain–computer interface system. Heliyon 2020, 6, e03425. [Google Scholar] [CrossRef] [PubMed]
- Tariq, M.; Trivailo, P.M.; Simic, M. Motor imagery based EEG features visualization for BCI applications. Procedia Comput. Sci. 2018, 126, 1936–1944. [Google Scholar] [CrossRef]
- Zhang, X.; Yao, L.; Sheng, Q.Z.; Kanhere, S.S.; Gu, T.; Zhang, D. Converting your thoughts to texts: Enabling brain typing via deep feature learning of eeg signals. In Proceedings of the 2018 IEEE international conference on pervasive computing and communications (PerCom), Athens, Greece, 19–23 March 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–10. [Google Scholar]
- Chowdhury, A.; Raza, H.; Meena, Y.K.; Dutta, A.; Prasad, G. Online covariate shift detection-based adaptive brain–computer interface to trigger hand exoskeleton feedback for neuro-rehabilitation. IEEE Trans. Cogn. Dev. Syst. 2017, 10, 1070–1080. [Google Scholar] [CrossRef] [Green Version]
- Daeglau, M.; Wallhoff, F.; Debener, S.; Condro, I.S.; Kranczioch, C.; Zich, C. Challenge accepted? Individual performance gains for motor imagery practice with humanoid robotic EEG neurofeedback. Sensors 2020, 20, 1620. [Google Scholar] [CrossRef] [Green Version]
- LaFleur, K.; Cassady, K.; Doud, A.; Shades, K.; Rogin, E.; He, B. Quadcopter control in three-dimensional space using a noninvasive motor imagery-based brain–computer interface. J. Neural Eng. 2013, 10, 046003. [Google Scholar] [CrossRef] [Green Version]
- Alanis-Espinosa, M.; Gutiérrez, D. On the assessment of functional connectivity in an immersive brain–computer interface during motor imagery. Front. Psychol. 2020, 11, 1301. [Google Scholar] [CrossRef]
- Xu, B.; Li, W.; He, X.; Wei, Z.; Zhang, D.; Wu, C.; Song, A. Motor imagery based continuous teleoperation robot control with tactile feedback. Electronics 2020, 9, 174. [Google Scholar] [CrossRef] [Green Version]
- Zhuang, J.; Geng, K.; Yin, G. Ensemble learning based brain–computer interface system for ground vehicle control. IEEE Trans. Syst. Man, Cybern. Syst. 2019, 51, 5392–5404. [Google Scholar] [CrossRef]
- Liu, Y.; Habibnezhad, M.; Jebelli, H. Brain-computer interface for hands-free teleoperation of construction robots. Autom. Constr. 2021, 123, 103523. [Google Scholar] [CrossRef]
- Mahmood, M.; Kwon, S.; Kim, H.; Kim, Y.S.; Siriaraya, P.; Choi, J.; Otkhmezuri, B.; Kang, K.; Yu, K.J.; Jang, Y.C.; et al. Wireless Soft Scalp Electronics and Virtual Reality System for Motor Imagery-Based Brain–Machine Interfaces. Adv. Sci. 2021, 8, 2101129. [Google Scholar] [CrossRef] [PubMed]
- Djamal, E.C.; Abdullah, M.Y.; Renaldi, F. Brain computer interface game controlling using fast fourier transform and learning vector quantization. J. Telecommun. Electron. Comput. Eng. JTEC 2017, 9, 71–74. [Google Scholar]
- Mitocaru, A.; Poboroniuc, M.S.; Irimia, D.; Baciu, A. Comparison Between Two Brain Computer Interface Systems Aiming to Control a Mobile Robot. In Proceedings of the 2021 International Conference on Electromechanical and Energy Systems (SIELMEN), Chisinau, Moldova, 7–8 October 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–5. [Google Scholar]
- Mwata-Velu, T.; Ruiz-Pinales, J.; Rostro-Gonzalez, H.; Ibarra-Manzano, M.A.; Cruz-Duarte, J.M.; Avina-Cervantes, J.G. Motor imagery classification based on a recurrent-convolutional architecture to control a hexapod robot. Mathematics 2021, 9, 606. [Google Scholar] [CrossRef]
- Parikh, D.; George, K. Quadcopter Control in Three-Dimensional Space Using SSVEP and Motor Imagery-Based Brain-Computer Interface. In Proceedings of the 2020 11th IEEE Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 4–7 November 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 0782–0785. [Google Scholar]
- Wu, S.L.; Liu, Y.T.; Chou, K.P.; Lin, Y.Y.; Lu, J.; Zhang, G.; Chuang, C.H.; Lin, W.C.; Lin, C.T. A motor imagery based brain–computer interface system via swarm-optimized fuzzy integral and its application. In Proceedings of the 2016 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Vancouver, BC, Canada, 24–29 July 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 2495–2500. [Google Scholar]
- Abdulwahab, S.S.; Khleaf, H.K.; Jassim, M.H. EEG Motor-Imagery BCI System Based on Maximum Overlap Discrete Wavelet Transform (MODWT) and cubic SVM. J. Phys. Conf. Ser. 2021, 1973, 012056. [Google Scholar] [CrossRef]
- Freer, D.; Deligianni, F.; Yang, G.Z. Adaptive Riemannian BCI for enhanced motor imagery training protocols. In Proceedings of the 2019 IEEE 16th International Conference on Wearable and Implantable Body Sensor Networks (BSN), Chicago, IL, USA, 19–22 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–4. [Google Scholar]
- Garcia-Moreno, F.M.; Bermudez-Edo, M.; Garrido, J.L.; Rodríguez-Fórtiz, M.J. Reducing response time in motor imagery using a headband and deep learning. Sensors 2020, 20, 6730. [Google Scholar] [CrossRef]
- Guan, S.; Li, J.; Wang, F.; Yuan, Z.; Kang, X.; Lu, B. Discriminating three motor imagery states of the same joint for brain–computer interface. PeerJ 2021, 9, e12027. [Google Scholar] [CrossRef]
- Guan, S.; Zhao, K.; Yang, S. Motor imagery EEG classification based on decision tree framework and Riemannian geometry. Comput. Intell. Neurosci. 2019, 2019, 5627156. [Google Scholar] [CrossRef] [Green Version]
- Jawanjalkar, A.R.; Padole, D.V. Development of soft computing technique for classification of EEG signal. In Proceedings of the 2017 International Conference on Innovations in Information, Embedded and Communication Systems (ICIIECS), Coimbatore, India, 17–18 March 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Khan, J.; Bhatti, M.H.; Khan, U.G.; Iqbal, R. Multiclass EEG motor-imagery classification with sub-band common spatial patterns. Eurasip J. Wirel. Commun. Netw. 2019, 2019, 174. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.H.; Jeong, J. Decoding electroencephalographic signals for direction in brain–computer interface using echo state network and Gaussian readouts. Comput. Biol. Med. 2019, 110, 254–264. [Google Scholar] [CrossRef]
- Lisi, G.; Rivela, D.; Takai, A.; Morimoto, J. Markov switching model for quick detection of event related desynchronization in EEG. Front. Neurosci. 2018, 12, 24. [Google Scholar] [CrossRef]
- Lo, C.C.; Chien, T.Y.; Chen, Y.C.; Tsai, S.H.; Fang, W.C.; Lin, B.S. A wearable channel selection-based brain–computer interface for motor imagery detection. Sensors 2016, 16, 213. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mladenov, T.; Kim, K.; Nooshabadi, S. Accurate motor imagery based dry electrode brain–computer interface system for consumer applications. In Proceedings of the 2012 IEEE 16th International Symposium on Consumer Electronics, Harrisburg, PA, USA, 4–6 June 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1–4. [Google Scholar]
- Rodriguez-Ugarte, M.D.l.S.; Iáñez, E.; Ortiz-Garcia, M.; Azorín, J.M. Effects of tDCS on real-time BCI detection of pedaling motor imagery. Sensors 2018, 18, 1136. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Riyadi, M.A.; Setiawan, I.; Amir, A. EEG Multiclass Signal Classification Based on Subtractive Clustering-ANFIS and Wavelet Packet Decomposition. In Proceedings of the 2021 International Conference on Electrical and Information Technology (IEIT), Malang, Indonesia, 14–15 September 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 81–86. [Google Scholar]
- Shajil, N.; Mohan, S.; Srinivasan, P.; Arivudaiyanambi, J.; Arasappan Murrugesan, A. Multiclass classification of spatially filtered motor imagery EEG signals using convolutional neural network for BCI based applications. J. Med. Biol. Eng. 2020, 40, 663–672. [Google Scholar] [CrossRef]
- Shajil, N.; Sasikala, M.; Arunnagiri, A. Deep learning classification of two-class motor imagery EEG signals using transfer learning. In Proceedings of the 2020 International Conference on e-Health and Bioengineering (EHB), Iasi, Romania, 29–30 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–4. [Google Scholar]
- Tiwari, S.; Goel, S.; Bhardwaj, A. Machine learning approach for the classification of EEG signals of multiple imagery tasks. In Proceedings of the 2020 11th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Kharagpur, India, 1–3 July 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–7. [Google Scholar]
- Triana Guzmán, N.; Orjuela-Cañón, Á.D.; Jutinico Alarcon, A.L. Incremental training of neural network for motor tasks recognition based on brain–computer interface. In Proceedings of the Iberoamerican Congress on Pattern Recognition, Havana, Cuba, 28–31 October 2019; Springer: Berlin/Heidelberg, Germany, 2019; pp. 610–619. [Google Scholar]
- Yang, B.; Tang, J.; Guan, C.; Li, B. Motor imagery EEG recognition based on FBCSP and PCA. In Proceedings of the International Conference on Brain Inspired Cognitive Systems, Xi’an, China, 7–8 July 2018; Springer: Berlin/Heidelberg, Germany, 2018; pp. 195–205. [Google Scholar]
- Yang, D.; Nguyen, T.H.; Chung, W.Y. A Synchronized Hybrid Brain-Computer Interface System for Simultaneous Detection and Classification of Fusion EEG Signals. Complexity 2020, 2020, 4137283. [Google Scholar] [CrossRef]
- Yusoff, M.Z.; Mahmoud, D.; Malik, A.S.; Bahloul, M.R. Discrimination of four class simple limb motor imagery movements for brain–computer interface. Biomed. Signal Process. Control 2018, 44, 181–190. [Google Scholar]
- Zhou, B.; Wu, X.; Lv, Z.; Zhang, L.; Zhang, C. Independent component analysis combined with compressed sensing for EEG compression in BCI. In Proceedings of the 2015 10th International Conference on Information, Communications and Signal Processing (ICICS), Singapore, 2–4 December 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–4. [Google Scholar]
- Zich, C.; Schweinitz, C.; Debener, S.; Kranczioch, C. Multimodal evaluation of motor imagery training supported by mobile EEG at home: A case report. In Proceedings of the 2015 IEEE International Conference on Systems, Man, and Cybernetics, Hong Kong, China, 9–12 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 3181–3186. [Google Scholar]
- Verma, P.; Heilinger, A.; Reitner, P.; Grünwald, J.; Guger, C.; Franklin, D. Performance investigation of brain–computer interfaces that combine EEG and fNIRS for motor imagery tasks. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 259–263. [Google Scholar]
- Rodríguez-Ugarte, M.; Angulo-Sherman, I.; Iáñez, E.; Ortiz, M.; Azorín, J. Preliminary study of pedaling motor imagery classification based on EEG signals. In Proceedings of the 2017 International Symposium on Wearable Robotics and Rehabilitation (WeRob), Houston, TX, USA, 5–8 November 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–2. [Google Scholar]
- Hirsch, G.; Dirodi, M.; Xu, R.; Reitner, P.; Guger, C. Online classification of motor imagery using EEG and fNIRS: A hybrid approach with real time human–computer interaction. In Proceedings of the International Conference on Human–Computer Interaction, Sibiu, Romania, 22–23 October 2020; Springer: Berlin/Heidelberg, Germany, 2020; pp. 231–238. [Google Scholar]
- Dehzangi, O.; Zou, Y.; Jafari, R. Simultaneous classification of motor imagery and SSVEP EEG signals. In Proceedings of the 2013 6th International IEEE/EMBS Conference on Neural Engineering (NER), San Diego, CA, USA, 6–8 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1303–1306. [Google Scholar]
- Cha, K.; Lee, J.; Kim, H.; Kim, C.; Lee, S. Steady-State Somatosensory Evoked Potential based Brain-Computer Interface for Sit-to-Stand Movement Intention. In Proceedings of the 2019 7th International Winter Conference on Brain-Computer Interface (BCI), Gangwon, Republic of Korea, 18–20 February 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–3. [Google Scholar]
- Arfaras, G.; Athanasiou, A.; Pandria, N.; Kavazidi, K.R.; Kartsidis, P.; Astaras, A.; Bamidis, P.D. Visual versus kinesthetic motor imagery for BCI control of robotic arms (Mercury 2.0). In Proceedings of the 2017 IEEE 30th International Symposium on Computer-Based Medical Systems (CBMS), Thessaloniki, Greece, 22–24 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 440–445. [Google Scholar]
- Angrisani, L.; Arpaia, P.; Donnarumma, F.; Esposito, A.; Frosolone, M.; Improta, G.; Moccaldi, N.; Natalizio, A.; Parvis, M. Instrumentation for Motor Imagery-based Brain Computer Interfaces relying on dry electrodes: A functional analysis. In Proceedings of the 2020 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Dubrovnik, Croatia, 25–28 May 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Bista, S.; BikramAdhikari, N. Performance Analysis of Tri-channel Active Electrode EEG Device Designed for Classification of Motor Imagery Brainwaves for Brain ComputerInterface. In Proceedings of the 2018 International Conference on Advances in Computing, Communication Control and Networking (ICACCCN), Greater Noida, India, 12–13 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 662–667. [Google Scholar]
- Liao, L.D.; Wu, S.L.; Liou, C.H.; Lu, S.W.; Chen, S.A.; Chen, S.F.; Ko, L.W.; Lin, C.T. A novel 16-channel wireless system for electroencephalography measurements with dry spring-loaded sensors. IEEE Trans. Instrum. Meas. 2014, 63, 1545–1555. [Google Scholar] [CrossRef]
- Lin, C.L.; Chu, T.Y.; Wu, P.J.; Wang, C.A.; Lin, B.S. Design of wearable brain computer interface based on motor imagery. In Proceedings of the 2014 Tenth International Conference on Intelligent Information Hiding and Multimedia Signal Processing, Kitakyushu, Japan, 27–29 August 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 33–36. [Google Scholar]
- Lin, B.S.; Pan, J.S.; Chu, T.Y.; Lin, B.S. Development of a wearable motor-imagery-based brain–computer interface. J. Med. Syst. 2016, 40, 1–8. [Google Scholar] [CrossRef]
- Vourvopoulos, A.; Niforatos, E.; Giannakos, M. EEGlass: An EEG-eyeware prototype for ubiquitous brain–computer interaction. In Proceedings of the 2019 ACM International Joint Conference on Pervasive and Ubiquitous Computing and Proceedings of the 2019 ACM International Symposium on Wearable Computers, London, UK, 9–13 September 2019; pp. 647–652. [Google Scholar]
- Zhang, Y.; Zhang, X.; Sun, H.; Fan, Z.; Zhong, X. Portable brain–computer interface based on novel convolutional neural network. Comput. Biol. Med. 2019, 107, 248–256. [Google Scholar] [CrossRef]
- Advanced Brain Monitoring, I. B-Alert X-Series Wireless & Mobile EEG System. Available online: https://www.advancedbrainmonitoring.com/products/b-alert-x-series (accessed on 3 October 2022).
- bio medical.com. BrainMaster Discovery 24E-24 Channel qEEG. Available online: https://bio-medical.com/brainmaster-discovery-24e-24-channel-qeeg.html (accessed on 3 October 2022).
- By Shopify, O.O.S.P. Cyton Biosensing Board (8-Channels)—OpenBCI Online Store. Available online: https://shop.openbci.com/products/cyton-biosensing-board-8-channel?variant=38958638542 (accessed on 3 October 2022).
- Neuro, A. eego™rt|ANT Neuro. Available online: https://www.ant-neuro.com/products/eego_rt (accessed on 3 October 2022).
- Peterson, V.; Wyser, D.; Lambercy, O.; Spies, R.; Gassert, R. A penalized time-frequency band feature selection and classification procedure for improved motor intention decoding in multichannel EEG. J. Neural Eng. 2019, 16, 016019. [Google Scholar] [CrossRef] [Green Version]
- Neuroelectrics. Enobio 20|Solutions|Neuroelectrics. Available online: https://www.neuroelectrics.com/solutions/enobio/20 (accessed on 3 October 2022).
- Neuroelectrics. Enobio 8|Solutions|Neuroelectrics. Available online: https://www.neuroelectrics.com/solutions/enobio/8 (accessed on 3 October 2022).
- Venot, T.; Corsi, M.C.; Saint-Bauzel, L.; de Vico Fallani, F. Towards multimodal BCIs: The impact of peripheral control on motor cortex activity and sense of agency. In Proceedings of the 2021 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Virtual, 1–5 November 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 5876–5879. [Google Scholar]
- Abdalsalam, E.; Yusoff, M.Z.; Malik, A.; Kamel, N.S.; Mahmoud, D. Modulation of sensorimotor rhythms for brain–computer interface using motor imagery with online feedback. Signal Image Video Process. 2018, 12, 557–564. [Google Scholar] [CrossRef]
- EMOTIV. EMOTIV EPOC+ 14-Channel Wireless EEG Headset-EMOTIV. Available online: https://www.emotiv.com/epoc/ (accessed on 3 October 2022).
- Zhang, S.; Yuan, S.; Huang, L.; Zheng, X.; Wu, Z.; Xu, K.; Pan, G. Human mind control of rat cyborg’s continuous locomotion with wireless brain-to-brain interface. Sci. Rep. 2019, 9, 1321. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zich, C.; De Vos, M.; Kranczioch, C.; Debener, S. Wireless EEG with individualized channel layout enables efficient motor imagery training. Clin. Neurophysiol. 2015, 126, 698–710. [Google Scholar] [CrossRef] [PubMed]
- EMOTIV. EPOC Flex-32-Channel Wireless EEG Device-EMOTIV. Available online: https://www.emotiv.com/epoc-flex/ (accessed on 3 October 2022).
- Paszkiel, S.; Dobrakowski, P. Brain–computer technology-based training system in the field of motor imagery. IET Sci. Meas. Technol. 2020, 14, 1014–1018. [Google Scholar] [CrossRef]
- EMOTIV. EMOTIV EPOC X-14 Channel Wireless EEG Headset—EMOTIV. Available online: https://www.emotiv.com/epoc-x/ (accessed on 3 October 2022).
- g.tec medical engineering GmbH Austria. g.USBAMP RESEARCH|EEG/Biosignal Amplifier | g.tec Medical Engineering GmbH Medical Engineering. Available online: https://www.gtec.at/product/gusbamp-research/ (accessed on 3 October 2022).
- ab medica s.p.a. Dispositivi medici innovativi-Robotica-Telemedicina-ab Medica. Available online: https://www.abmedica.it/ (accessed on 3 October 2022).
- EMOTIV. Insight Brainwear® 5 Channel Wireless EEG Headset-EMOTIV. Available online: https://www.emotiv.com/insight/ (accessed on 3 October 2022).
- NeuroSky. MindWave. Available online: https://store.neurosky.com/pages/mindwave (accessed on 3 October 2022).
- Kevric, J.; Subasi, A. The impact of Mspca signal de-noising in real-time wireless brain computer interface system. Southeast Eur. J. Soft Comput. 2015, 4, 43–47. [Google Scholar] [CrossRef] [Green Version]
- Muse. Muse 2: Brain Sensing Headband-Technology Enhanced Meditation. Available online: https://choosemuse.com/muse-2/ (accessed on 3 October 2022).
- g.tec medical engineering GmbH Austria. g.Nautilus Multiple Biosignal Recording|g.tec Medical Engineering GmbH. Available online: https://www.gtec.at/product/gnautilus-multipurpose/ (accessed on 3 October 2022).
- g.tec medical engineering GmbH Austria. g.Nautilus PRO Wearable EEG|g.tec Medical Engineering GmbH. Available online: https://www.gtec.at/product/gnautilus-pro/ (accessed on 3 October 2022).
- g.tec medical engineering GmbH Austria. g.NAUTILUS RESEARCH|Wearable EEG Headset|g.tec Medical Engineering GmbH. Available online: https://www.gtec.at/product/gnautilus-research/ (accessed on 3 October 2022).
- Neuroscan, C. Nuamps–Compumedics Neuroscan. Available online: https://compumedicsneuroscan.com/nuamps-4/ (accessed on 3 October 2022).
- COGNIONICS, I. Quick-20 Dry EEG Headset (2). Available online: http://www.cognionics.com/index.php/32-uncategorised/94-quick-20-dry-headset-2 (accessed on 3 October 2022).
- Neuroelectrics. Starstim® tES-EEG Systems|Neuroelectrics. Available online: https://www.neuroelectrics.com/solutions/starstim (accessed on 3 October 2022).
- AG, N. Synamps 2/RT | NEUROSPEC AG Research Neurosciences. Available online: https://www.neurospec.com/Products/Details/1017/synamps-2rt (accessed on 3 October 2022).
- Rashmi, C.; Shantala, C. EEG artifacts detection and removal techniques for brain computer interface applications: A systematic review. Int. J. Adv. Technol. Eng. Explor. 2022, 9, 354. [Google Scholar]
- Fatourechi, M.; Bashashati, A.; Ward, R.K.; Birch, G.E. EMG and EOG artifacts in brain computer interface systems: A survey. Clin. Neurophysiol. 2007, 118, 480–494. [Google Scholar] [CrossRef] [PubMed]
- Seok, D.; Lee, S.; Kim, M.; Cho, J.; Kim, C. Motion artifact removal techniques for wearable EEG and PPG sensor systems. Front. Electron. 2021, 2, 685513. [Google Scholar] [CrossRef]
- Delorme, A.; Makeig, S. EEGLAB: An open source toolbox for analysis of single-trial EEG dynamics including independent component analysis. J. Neurosci. Methods 2004, 134, 9–21. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Blankertz, B.; Muller, K.R.; Krusienski, D.J.; Schalk, G.; Wolpaw, J.R.; Schlogl, A.; Pfurtscheller, G.; Millan, J.R.; Schroder, M.; Birbaumer, N. The BCI competition III: Validating alternative approaches to actual BCI problems. IEEE Trans. Neural Syst. Rehabil. Eng. 2006, 14, 153–159. [Google Scholar] [CrossRef]
- Tangermann, M.; Müller, K.R.; Aertsen, A.; Birbaumer, N.; Braun, C.; Brunner, C.; Leeb, R.; Mehring, C.; Miller, K.J.; Mueller-Putz, G.; et al. Review of the BCI competition IV. Front. Neurosci. 2012, 6, 55. [Google Scholar]
- Goldberger, A.L.; Amaral, L.A.; Glass, L.; Hausdorff, J.M.; Ivanov, P.C.; Mark, R.G.; Mietus, J.E.; Moody, G.B.; Peng, C.K.; Stanley, H.E. PhysioBank, PhysioToolkit, and PhysioNet: Components of a new research resource for complex physiologic signals. Circulation 2000, 101, e215–e220. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kaya, M.; Binli, M.K.; Ozbay, E.; Yanar, H.; Mishchenko, Y. A large electroencephalographic motor imagery dataset for electroencephalographic brain computer interfaces. Sci. Data 2018, 5, 180211. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Leeb, R.; Lee, F.; Keinrath, C.; Scherer, R.; Bischof, H.; Pfurtscheller, G. Brain–computer communication: Motivation, aim, and impact of exploring a virtual apartment. IEEE Trans. Neural Syst. Rehabil. Eng. 2007, 15, 473–482. [Google Scholar] [CrossRef] [PubMed]
- Lin, X.; Wang, L.; Ohtsuki, T. Online Recursive ICA Algorithm Used for Motor Imagery EEG Signal. In Proceedings of the 2020 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Montreal, QC, Canada, 20–24 July 2020; pp. 502–505. [Google Scholar] [CrossRef]
- Tuţă, L.; Roşu, G.; Popovici, C.; Nicolaescu, I. Real-Time EEG Data Processing Using Independent Component Analysis (ICA). In Proceedings of the 2022 14th International Conference on Communications (COMM), Bucharest, Romania, 16–18 June 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Raza, H.; Rathee, D.; Zhou, S.M.; Cecotti, H.; Prasad, G. Covariate shift estimation based adaptive ensemble learning for handling non-stationarity in motor imagery related EEG-based brain–computer interface. Neurocomputing 2019, 343, 154–166. [Google Scholar] [CrossRef]
- Miladinović, A.; Ajčević, M.; Jarmolowska, J.; Marusic, U.; Colussi, M.; Silveri, G.; Battaglini, P.P.; Accardo, A. Effect of power feature covariance shift on BCI spatial-filtering techniques: A comparative study. Comput. Methods Programs Biomed. 2021, 198, 105808. [Google Scholar] [CrossRef] [PubMed]
- Millan, J.; Mourino, J. Asynchronous BCI and local neural classifiers: An overview of the adaptive brain interface project. IEEE Trans. Neural Syst. Rehabil. Eng. 2003, 11, 159–161. [Google Scholar] [CrossRef] [Green Version]
- Roc, A.; Pillette, L.; Mladenović, J.; Benaroch, C.; N’Kaoua, B.; Jeunet, C.; Lotte, F. A review of user training methods in brain computer interfaces based on mental tasks. J. Neural Eng. 2020, 18, 011002. [Google Scholar] [CrossRef]
- Covi, E.; Donati, E.; Liang, X.; Kappel, D.; Heidari, H.; Payvand, M.; Wang, W. Adaptive extreme edge computing for wearable devices. Front. Neurosci. 2021, 15, 611300. [Google Scholar] [CrossRef]
- Jin, X.; Li, L.; Dang, F.; Chen, X.; Liu, Y. A survey on edge computing for wearable technology. Digit. Signal Process. 2022, 125, 103146. [Google Scholar] [CrossRef]
- Huang, D.; Wang, M.; Wang, J.; Yan, J. A Survey of Quantum Computing Hybrid Applications with Brain-Computer Interface. Cogn. Robot. 2022, 2, 164–176. [Google Scholar] [CrossRef]
- Miranda, E.R.; Martín-Guerrero, J.D.; Venkatesh, S.; Hernani-Morales, C.; Lamata, L.; Solano, E. Quantum Brain Networks: A Perspective. Electronics 2022, 11, 1528. [Google Scholar] [CrossRef]
- Miranda, E.R.; Venkatesh, S.; Martın-Guerrero, J.D.; Hernani-Morales, C.; Lamata, L.; Solano, E. An approach to interfacing the brain with quantum computers: Practical steps and caveats. arXiv 2022, arXiv:2201.00817. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Search Engine | Author | Last Consultation Date |
|---|---|---|
| IEEE Xplore | F.G. | 22 June 2022 |
| Mendeley | F.G. | 22 June 2022 |
| PubMed | S.C. | 22 June 2022 |
| ScienceOPEN | A.S. | 21 June 2022 |
| Semantic Scholar | A.S. | 21 June 2022 |
| Scopus | A.S. | 22 June 2022 |
| Web of Science | S.C. | 22 June 2022 |
| Google Scholar | M.C. and A.S. | 20 June 2022 |
| Search Engine | EEG and BCI | EEG, BCI, and Wearable | EEG, BCI, and MI | EEG, BCI, Wearable, and MI |
|---|---|---|---|---|
| IEEE Xplore | 3584 | 121 | 546 | 13 |
| Mendeley | 10,723 | 286 | 3118 | 60 |
| PubMed | 2777 | 57 | 877 | 14 |
| ScienceOPEN | 2659 | 22 | 303 | 4 |
| Semantic Scholar | 12,200 | 1879 | 3630 | 259 |
| Scopus | 10,733 | 670 | 2909 | 74 |
| Web of Science | 6564 | 180 | 2491 | 40 |
| Rhythm | Frequency Range (Hz) | Occurrence |
|---|---|---|
| ≤4 | infants, deep sleep | |
| 4–8 | emotional stress, drowsiness | |
| 8–13 | relaxed awake state | |
| 8–13 | motor cortex functionalities | |
| 13–30 | alert state, active thinking/attention, anxiety | |
| ≥31 | intensive brain activity |
| Device | Producer | Electrodes | Price | Papers |
|---|---|---|---|---|
| B-Alert X-Series [164] | Advanced Brain Monitoring | up to 20/W (gel) | ask producer | [102] |
| BrainMaster Discovery 24E * [165] | bio-medical | 24/W, D (compatible) | USD 5800.00 | [114] |
| Cyton Biosensing Board * [166] | OpenBCI | 8/W, D (compatible) | USD 999.00 | [98,113,162] |
| eego rt [167] | ANT Neuro | 8-64/W, D | ask producer | [168] |
| Enobio 20 [169] | Neuroelectrics | 20/W, D | ask producer | [88,142] |
| Enobio 8 [170] | Neuroelectrics | 8/W, D | ask producer | [93,97,148,162,171,172] |
| EPOC+ [173] | Emotiv | 14/W (saline) | discontinued | [95,110,115,121,126,127,129,132,133,135,136,139,156,174,175] |
| EPOC Flex [176] | Emotiv | up to 32/W (gel, saline) | USD 1699.00–2099.00 | [122,177] |
| EPOC X [178] | Emotiv | 14/W (saline) | USD 849.00 | [107] |
| g.USBamp * with(out) g.MOBIlab [179] | g.tec medical engineering | 16/W, D | starting from EUR 11,900.00 | [87,104,120,125] |
| Helmate [180] | abmedica | NA/NA | ask producer | [111,157] |
| Insight [181] | Emotiv | 5/S | USD 499.00 | [106] |
| MindWave Mobile 2 [182] | Neurosky | 1/NA | USD 109.99 | [108,183] |
| Muse headband 2 [184] | InteraXon | 4/NA | EUR 269.99 | [109,112,131,141,144] |
| g.Nautilus Multi-Purpose * [185] | g.tec medical engineering | 8–64/W, D (compatible) | changing according to configuration, starting from EUR 4990.00 | [89,90,105,125,130,145,146,151,153,155] |
| g.Nautilus PRO [186] | g.tec medical engineering | 8–32/W, D | changing according to configuration, starting from EUR 5500.00 | [89,90,105,125,130,145,146,151,153,155] |
| g.Nautilus RESEARCH [187] | g.tec medical engineering | 8–64/W, D | changing according to configuration, starting from EUR 4990.00 | [89,90,105,125,130,145,146,151,153,155] |
| NuAmps * [188] | NeuroScan | 32/NA | ask producer | [92] |
| Quick-20 Dry EEG Headset [189] | Cognionics | 19/D | ask producer | [100,137] |
| Starstim [190] | neuroelectrics | 8–32/tES-EEG | ask producer | [103,140] |
| Synamps 2/RT * [191] | Neuroscan | 64/NA | ask producer | [118] |
| Reference | Dataset and Experimental Paradigm | Classification and/or Other Analyses | Performance of the Best Method | Online and/or Offline |
|---|---|---|---|---|
| Tang et al. [110] | Benchmark dataset: BCI Competition IV dataset 2b *. Own dataset: not available. Five subjects performed an experiment consisting of 90 repetitions of each of the MI tasks (left/right hand). | Classification task: binary (left vs. right hand). DBN, DWT-LSTM, 1DCNN, 2DCNN and one-dimensional multi-scale convolutional neural network (1DMSCNN). | Measures: average accuracy with 1DMSCNN. Validation strategy: dataset division in training and test sets according to the 4:1 ratio. BCI Competition IV dataset 2b (offline analysis): 82.61%. Own dataset (online analysis): accuracy for each subject 76.78%, 91.78%, 70.00%. | both |
| Guan, Zhao, and Yang [133] | Benchmark dataset: BCI Competition IV dataset 2a *, BCI Competition III dataset IIIa *.
Own dataset: available upon request. Seven subjects performed imagination of shoulder flexion, extension, and abduction. The acquisition were repeated for 20 trials, each lasting for 5 s of activity plus 5–7 s rest. | Classification tasks: one-vs.-one, one-vs.-rest. 1. Subject-specific decision tree (SSDT) framework with filter geodesic minimum distance to Riemannian mean (FGMDRM). 2. Feature extraction algorithm combining semisupervised joint mutual information with general discriminate analysis (SJGDA) to reduce the dimension of vectors in the Riemannian tangent plane and classification with KNN. | Measures: average accuracy and mean kappa value. Validation strategy: k-fold cross validation. BCI Competition IV dataset 2a: - SSDT-FGMDRM 10-fold cross-validation average accuracy left vs. rest 82.00%, right vs. rest 81.28%, foot vs. rest 81.51%, tongue vs. rest 83.95%. SSDT-FGMDRM mean kappa value 0.589. - SJGDA 10-fold cross-validation mean accuracy left vs. rest 84.3%, right vs. rest 83.54%, foot vs. rest 82.11%, tongue vs. rest 85.23%. SJGDA mean kappa value 0.607. - SJGDA 10-fold cross-validation mean accuracy on left vs. right 79.41%, left vs. feet 87.14%, left vs. tongue 86.51%, right vs. feet 86.75%, right vs. tongue 87.00%, feet vs. tongue 82.04%. BCI Competition III dataset IIIa: 5-fold cross-validation mean accuracy on 82.78%. Own dataset: 5-fold cross-validation mean accuracy (rounded values taken from the provided bar graphics) flexion vs. rest 90.00%, extension vs. rest 80.00%, abduction vs. rest a bit more than 90.00% and flexion vs. extension 90.00%, flexion vs. abduction 95.00%, extension vs. abduction 90.00%. | offline |
| Peterson et al. [168] | Benchmark dataset: BCI competition III dataset IVa * and BCI competition IV dataset 2b.
Own dataset: 11 subjects performed imagination of dominant hand grasping and a resting condition in four runs constituted by 20 trials per class. | Classification task: binary (rest vs. dominant hand grasping). Optimal feature selection and classification contemporaneously performed through generalized sparse LDA. | Measures: average accuracy (reported best). Validation strategy: 10 × 10 fold cross validation. BCI competition III: 90.94 (±1.06)%. BCI competition IV: 81.23 (±2.46)%. Own dataset: 82.26 (±2.98)%. | offline |
| Yang, Nguyen, and Chung [147] | Benchmark dataset: None
Own dataset: available upon request. Six subjects, 10 trials of right hand grasping imagination for 5 s. The experiment was repeated for 10 runs. Notice that SSVEP tasks were also included. | Classification task: multi-class both MI and SSVEP. CNN. | Measures: best average accuracy (MI task).
Own dataset: 91.73 (±1.55)%. | offline |
| Freer, Deligianni, and Yang [130] | Benchmark dataset: BCI competition IV dataset 2a.
Own dataset: three subjects performed a paradigm without and with feedback. A total of 20 trials for each of the four conditions (left/right hand, both hands/feet) are performed per run with MI of 2–3 s. | Classification task: multi-class (4 classes). Adaptive Riemannian classifier. | Measures: accuracy.
BCI Competition IV dataset 2a: lower than 50%. Own dataset: lower than 50%. | both |
| Barria et al. [88] | Benchmark dataset: None
Own dataset: available (https://www.clinicaltrials.gov/ct2/show/NCT04995367 accessed on 31 January 2023). Five subjects, five phases: calibration, real movement, stationary therapy, MI detection with visual stimulation, and MI detection with visual and haptic stimulation. Besides the first phases, the protocol consisted of 10 s alternations of knee flection task and rest. | Classification task: None. Other analyses: - Control of ankle exoskeleton through knee flection. - Analysis of the success rate in using the BCI, based on the beta power rebound threshold. - Quebec User Evaluation of Satisfaction with Assistive Technology test to evaluate patients’ satisfaction. | None. | offline |
| Peterson et al. [113] | Benchmark dataset: None Own dataset *: https://github.com/vpeterson/MI-OpenBCI (accessed on 31 January 2023). | Classification task: binary (rest vs. dominant hand grasping). Generalized sparse discriminant analysis is used for both feature selection and classification. Other analyses: - The motor imagery ability of a single subject has been accessed through the KVIQ-10 questionnaire. - Analyses of temporal and frequency information. | Measures: average accuracy (extracted from bar plot). Own dataset: around 85% with Penalized Time–Frequency Band Common Spatial Pattern (PTFBCSP). | both |
| Shajil, Sasikala, and Arunnagiri [143] | Benchmark dataset: BCI competition IV dataset 2a. Own dataset: nine subjects performed 80 trials per MI conditions: left and right hand. | Classification task: binary. AlexNet, ResNet50, and InceptionV3 (pre-trained CNN models) plus transfer learning. | Measures: best average accuracy. BCI competition IV dataset 2a: InceptionV3 82.78 (±4.87)%. Own dataset: InceptionV3 83.79 (±3.49)%. | offline |
| Zhang et al. [115] | Benchmark dataset: used 10 subjects of Physionet EEG Motor Movement/Imagery Dataset *. Own dataset: seven subjects. Five conditions: eyes closed, left/right hand, both hands/feet paradigm (as for the benchmark dataset). | Classification task: multi-class on five conditions. RNN, CNN, RNN + CNN. | Measures: average accuracy. (Precision, Recall, F1, AUC and confusion matrix for both Physionet and own dataset are also provided). Validation: - Benchmark dataset divided into training (21,000 samples) and test sets (7000 samples). - Own dataset divided into training (25,920 samples) and test sets (8640 samples) for each subject. Benchmark dataset: best model RNN+CNN 95.53% average accuracy. Own dataset: best model RNN+CNN 94.27% average accuracy. | offline |
| Mwata et al. [126] | Benchmark dataset: EEG BCI dataset *. Own dataset: four subjects. Experimental conditions: right and left hand, and the neutral action. | Classification task: multi-class on three conditions (neutral, left/right with corresponding robot command forward, backward, and neutral). Hybrid CNN-LSTM model. Other analyses: Report different subject-combinations based-analysis. | Measures: average accuracy. Validation strategy: 10-fold cross validation. Benchmark dataset: 79.2%. Own dataset: 84.69%. | online |
| Apicella et al. [111] | Benchmark dataset: None. Own dataset: 17 subjects. Motor task consists of maintaining attention focused only on (i) the squeeze movement (attentive-subject trial), or (ii) a concurrent distractor task (distracted-subject trial); in both trials, the participant must perform the squeeze-ball movement (three sessions, 30 trials per session). Total epochs: 4590. Half of the epochs were collected during the attentive-subject trials and were labeled as belonging to the first class. The remaining part was acquired during the distracted-subject trials and was labeled as belonging to the second class. | Classification task: binary (MI during attention vs. MI during distraction). KNN, SVM, ANN, LDA, NB. | Measures: average accuracy (also provide precision, recall and F1 measure). Validation strategy: 10-fold cross validation. Own dataset: k-NN 92.8 (±1.6)%. | offline |
| Alanis and Gutiérrez [119] | Benchmark dataset: None. Own dataset: available upon request, two subjects, four conditions: left or right hand, both hands, move up and down both feet. Five runs of forty trials. | Classification tasks: binary one-vs.-rest. LDA classifier using features extracted by BCI2000.
Other analyses: graph theory metrics to understand the differences in functional brain connectivity. | Best binary classification for both subjects: right hand open/close vs. rest. No classification results reported. | online |
| Mahmood et al. [123] | Benchmark dataset: None. Own dataset: available upon request, four subjects. Experimental conditions: eyes closed, left/right hand, pedal pressing. | Classification tasks: multiclass (4 classes). Population-based approach. SVM and CNN classifiers. | Measures: average accuracy. Validation strategy: 5-fold cross validation. CNN real-time accuracy: 89.65% and 93.22% for Ag/AgCl and FMNEs electrodes | both |
| Dataset | Link | Device | Experimental Paradigm |
|---|---|---|---|
| BCI Competition III dataset IIIa [196] | https://www.bbci.de/competition/iii/ | Neuroscan, 64 channel EEG amplifier (wired) | cue-based left/right hand, foot, tongue MI |
| BCI Competition III dataset IVa [196] | https://www.bbci.de/competition/iii/ | BrainAmps and 128 channel ECI cap (wired) | cue-based left/right hand, right foot MI |
| BCI Competition IV dataset 2a [197] | https://www.bbci.de/competition/iv/ | 22 electrodes (wired) | cue-based MI-BCI left/right hand, both feet, tongue MI |
| BCI Competition IV dataset 2b [197] | https://www.bbci.de/competition/iv/ | 3 electrodes (wired) | cue-based MI-BCI left/right hand MI |
| EEG Motor Movement/Imagery Dataset [42,198] | https://physionet.org/content/eegmmidb/1.0.0/ | 64 electrodes (wired) | cue-based motor execution/imagination left/right fist and both feet/fists opening/closing |
| MI-OpenBCI [113] | https://github.com/vpeterson/MI-OpenBCI | OpenBCI Cyton and Daisy Module, Electrocap System II, 15 electrodes (wearable) | cue-based dominant hand grasping MI |
| EEG BCI dataset [199] | https://figshare.com/collections/A_large_electroencephalographic_motor_imagery_dataset_for_electroencephalographic_brain_computer_interfaces/3917698 | EEG-1200 JE-921A EEG system, 19 electrodes (wired) | left/right hand, left/right leg, tongue, and finger MI |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saibene, A.; Caglioni, M.; Corchs, S.; Gasparini, F. EEG-Based BCIs on Motor Imagery Paradigm Using Wearable Technologies: A Systematic Review. Sensors 2023, 23, 2798. https://doi.org/10.3390/s23052798
Saibene A, Caglioni M, Corchs S, Gasparini F. EEG-Based BCIs on Motor Imagery Paradigm Using Wearable Technologies: A Systematic Review. Sensors. 2023; 23(5):2798. https://doi.org/10.3390/s23052798
Chicago/Turabian StyleSaibene, Aurora, Mirko Caglioni, Silvia Corchs, and Francesca Gasparini. 2023. "EEG-Based BCIs on Motor Imagery Paradigm Using Wearable Technologies: A Systematic Review" Sensors 23, no. 5: 2798. https://doi.org/10.3390/s23052798