1. Introduction
At present, radar is developing rapidly in the direction of multifunction, digitalization, and integration. In this context, the development cycle of new radar is becoming longer and longer, and it is difficult for new radar to meet the requirements of system performance in technology fully. To effectively solve this problem, the concept of a Distributed Radar Network Localization System (DRNLS) came into being. The DRNLS can make up for the above shortcomings and form a comprehensive, three-dimensional, and multilevel system, significantly improving the system performance, which scholars favor. Since the Low Probability of Interception (LPI) performance is an essential factor affecting the survivability of radar, it is of great theoretical and practical significance to use a DRNLS to allocate power reasonably on the premise of ensuring that the DRNLS meets the LPI performance.
Generally, the influence of the radar network, aperture, and RCS uncertainty on power allocation is the three main factors determining radar LPI performance. In recent studies, deep neural networks have been widely used in natural language processing [
1,
2], heterogeneous relational attention networks are used to embed learning knowledge maps and computer vision [
3,
4], and some scholars have studied DRNLS resource allocation. For example, Refs. [
5,
6,
7,
8,
9,
10,
11] studied the problems related to a radar network. Refs. [
12,
13,
14,
15,
16] studied various problems related to allocating radar aperture resources. In Refs. [
17,
18,
19,
20,
21], relevant scholars studied the allocation of radar power resources.
A radar network is important for improving a radar systems’ detection and LPI performance. Each radar node in a radar network can transmit independent quadrature waveforms (to avoid interference) and receive and process all transmitted waveforms simultaneously [
5]. In 2010, Godrich and others [
6] studied the impact of different distributed MIMO radar networks on target tracking performance. The research shows that higher target tracking accuracy can be obtained by increasing the number of radar transmitters and receivers and illuminating the target from multiple perspectives. In 2013, Hachour et al. [
7] proposed a multisensor multitarget joint tracking and classification algorithm based on creed classification. According to the target motion state and acceleration information, the creed classifier was used to obtain the type set of the target. In 2015, Yang et al. [
8] studied the target tracking performance of radar network systems under deception jamming and analyzed the impact of different system parameters on target tracking performance. Sobhani et al. [
9] proposed a particle filter algorithm for UWB radar network multitarget tracking. In 2016, Liu et al. [
10] proposed a coordinated track initiation algorithm for a radar network system based on the target tracking information, which improved the target track initiation probability of the system. In 2020, Yan et al. [
11] proposed a cooperative detection and power allocation strategy for radar network target tracking, which optimizes the false alarm rate and transmission power of each radar node under the constraint of some resource budgets.
DRNLS power resource allocation is an important way to improve LPI performance, including optimizing the peak side lobe level (PSL) of the aperture, the number of elements in the radar aperture, and the power of a single element. Because of the limitation of the traditional radar concept, the traditional pattern synthesis research does not involve the resource management of antenna aperture and the uncertainty of the radar system and target environment. In 1990, Olen et al. [
12] proposed an adaptive weight selection algorithm for a given array element set to meet specific side lobe criteria. However, this is only to optimize the weights with ten uniformly distributed elements. Compared with [
12], Zhou and Ingram [
13] proposed a new adaptive pattern synthesis algorithm in 1999, which can more easily control the main lobe shape of any array. In 2005, Shi et al. [
14] proposed a new array pattern synthesis algorithm based on the two-step least squares method. They closed the array pattern by jointly modifying the phase of the desired pattern and the weight vector of the composite pattern. In addition, by simultaneously optimizing the sensor location and array complex weight coefficient to minimize PSLL and in order to maintain the desired beam pattern, in 2011, Cen et al. [
15] proposed an improved genetic algorithm for beam pattern synthesis of linear aperiodic arrays with arbitrary geometry. Considering the uncertainty of the radar system and target environment, Gong et al. [
16] introduced uncertainty in managing aperture resources in 2014. An optimal objective function can be obtained without all elements being in a working state. However, due to the uncertainty of the radar system and target environment, the aperture length and array element number that determines the pattern quality are uncertain.
Several scholars have studied the problem of DRNLS power resource allocation [
17,
18,
19,
20,
21], aiming to enable the DRNLS to dynamically coordinate the transmission parameters of all radars and improve the utilization efficiency of resources. Godrich et al. [
17] proposed a performance-based power allocation algorithm on the platform of distributed multiple input multiple outputs (MIMO) radars. The main idea of this algorithm is to make the DRNLS consume the least transmit power under the condition of achieving preset localization accuracy. Yan et al. [
18] applied the idea of power allocation to 3D target tracking and proposed a cognitive DRNLS target tracking algorithm. However, these algorithms assume that the target’s Radar Cross Section (RCS) information is known before. However, in the actual target location, the RCS information of the target at the next time cannot be obtained at the current time because it is related not only to the type, attitude, and position of the target but also to the angle of view, polarization, incident wavelength, and other factors [
22]. In this case, Chavali et al. [
19] proposed an antenna selection and power allocation algorithm for multitarget tracking. The algorithm adds the target RCS to the state variable to be estimated and sets its transition model as a first-order Markov process. By recursion of state variables, the RCS of the target at the next time can be predicted at the current time. Then, the BCRLB at the next time can be calculated iteratively and used as the cost function of power allocation. Liu et al. [
20] proposed an access control and power allocation algorithm based on CCP by establishing time-varying channels as random variables under the application background of cognitive radio. Yan et al. [
21] proposed a DRNLS robust power allocation algorithm based on nonlinear CCP (NCCP) for the random factor of RCS in target tracking. The purpose is to enable the DRNLS to dynamically coordinate the transmission parameters of all radars, thereby saving power resources as much as possible under the condition of meeting opportunity constraints.
In solving optimization problems, Liu et al. [
23,
24] used the data generated by fuzzy random simulation or random simulation to train a neural network and combined it with a genetic algorithm to form a hybrid intelligent algorithm. Han et al. [
25] combined the fuzzy random simulation method with the nondominated sorting genetic algorithm (NSGA) to form a hybrid intelligent optimization algorithm for the fuzzy random Chance Constrained Programmin model of aperture resource management of the antenna array. Compared with the genetic algorithm in Refs. [
23,
24], the hybrid intelligent optimization algorithm can obtain the optimal solution of the optimization problem without relying on the training of the neural network and can reduce the amount of computation. Therefore, based on the given constraints, it can find the number and layout of array elements that make the objective function optimal. In addition, Godrich et al. [
26] creatively proposed an iterative algorithm for the local search of minimum value, which can bridge the nonconvex optimization problem and the corresponding relaxed convex optimization problem. This algorithm can ensure that the optimal solution of the unrelaxed convex optimization problem can be further searched after using CVX to find the optimal solution of the relaxed convex optimization problem.
By combing the above documents, it was found that there are references that analyze how a certain factor in radar netting, aperture, and power affects LPI performance separately, but there is no research that comprehensively considers how these three factors affect LPI performance together. At the same time, in the aspect of solving optimization problems, there is no literature that combines a genetic algorithm to solve the optimal value without training the neural network with the iterative optimization algorithm (IOA) to ensure that the real optimal solution can be found smoothly with moderate calculation. Therefore, this paper proposes a joint allocation scheme of aperture and power for the DRNLS based on LPI (JA scheme). In this scheme, on the one hand, considering the fuzziness and randomness of the array element distribution, the fuzzy random Chance Constrained Programmin model is used to model the aperture optimization problem. On the other hand, due to the randomness of RCS, the stochastic-constrained programming model is used to model the power optimization problem. At the same time, because of the nonconvex nature of most optimization problems, based on properly expanding the IOA, the JA scheme can ensure that the optimal solution of the optimization problem can be found, and it can improve the LPI performance of the DRNLS. In addition, the optimal solution of the aperture optimization problem as one of the initial conditions of the power optimization problem is the key to realizing the joint allocation of aperture and power.
The content of this paper is organized as follows.
Section 2 introduces the system model and the comprehensive content of the pattern.
Section 3 analyzes the Schleher Interception Factor of the DRNLS.
Section 4 establishes the fuzzy random Chance Constrained Programmin model for radar antenna aperture resource management (RAARM-FRCCP model) and the random Chance Constrained Programmin model for minimizing Schleher Intercept Factor (MSIF-RCCP model) to minimize the number of array elements and the system’s Schleher Interception Factor.
Section 5 describes the fuzzy random simulation technology with genetic algorithm (FRS-GA) of the RAARM-FRCCP model and the random simulation technology with genetic algorithm (RS-GA) and iterative algorithm for locally searching the minimum (LSMIA) of the MSIF-RCCP model.
Section 6 conducts numerical simulations. In this section, the LPI performance of the DRNLS is analyzed first. Then, the resource consumption of the antenna array is minimized under the condition of meeting the chance constraints of the desired pattern parameters. Finally, when the MSE is given, the power allocation strategy with random RCS is compared with the uniform power allocation, and the low intercept performance at different confidence levels is analyzed.
6. Numerical Simulation
This section will verify and analyze the JA scheme proposed above through simulation experiments. The experimental scenario is a distributed radar system layout. The antenna of each radar is a square with a side length of 27, and 784 array elements are scattered inside. In order to analyze the impact of the power optimization algorithm in the JA scheme on radar LPI performance, this paper uses fixed power radar assignment (FPRA) for performance comparison. In FPRA mode, the power of a single radar to illuminate the target is fixed at 40 kW. The hardware of the experiment is a high-performance computer.
Refs. [
23,
24] point out that the genetic algorithm is very robust to the parameter setting of population size, crossover probability, and mutation probability, and changing these parameters will have little impact on the results. Therefore, this section sets the population size of the FRS-GA algorithm and the RS-GA algorithm to 100, the crossover probability and mutation probability are
and
, respectively, and the genetic algebra is 300. The number of fuzzy random simulations and random simulations is 1000.
As for the statistical characteristics of the Radar Cross Section (RCS) of aircraft targets, when the aircraft flies in more curves and the flight course changes more frequently, the radar will measure the RCS of the aircraft in more directions, and then the RCS can be regarded as a random process under different attitudes. Under the condition that the number of measurements is large enough and the aircraft attitude changes are large enough, the situations involved are richer and more random [
33]. According to the central limit theorem, the RCS of the aircraft is a Gaussian process; in theory, that is, the echo amplitude follows the Rayleigh distribution, and the RCS follows an exponential distribution. In practical application, the independent variable usually takes value in a reasonably limited range, and many theoretical values of probability distributions tend to be positive or negative infinity. Therefore, if the distribution interval is truncated properly, the theoretical analysis results can be more consistent with the actual situation. See
Appendix B for the certification process.
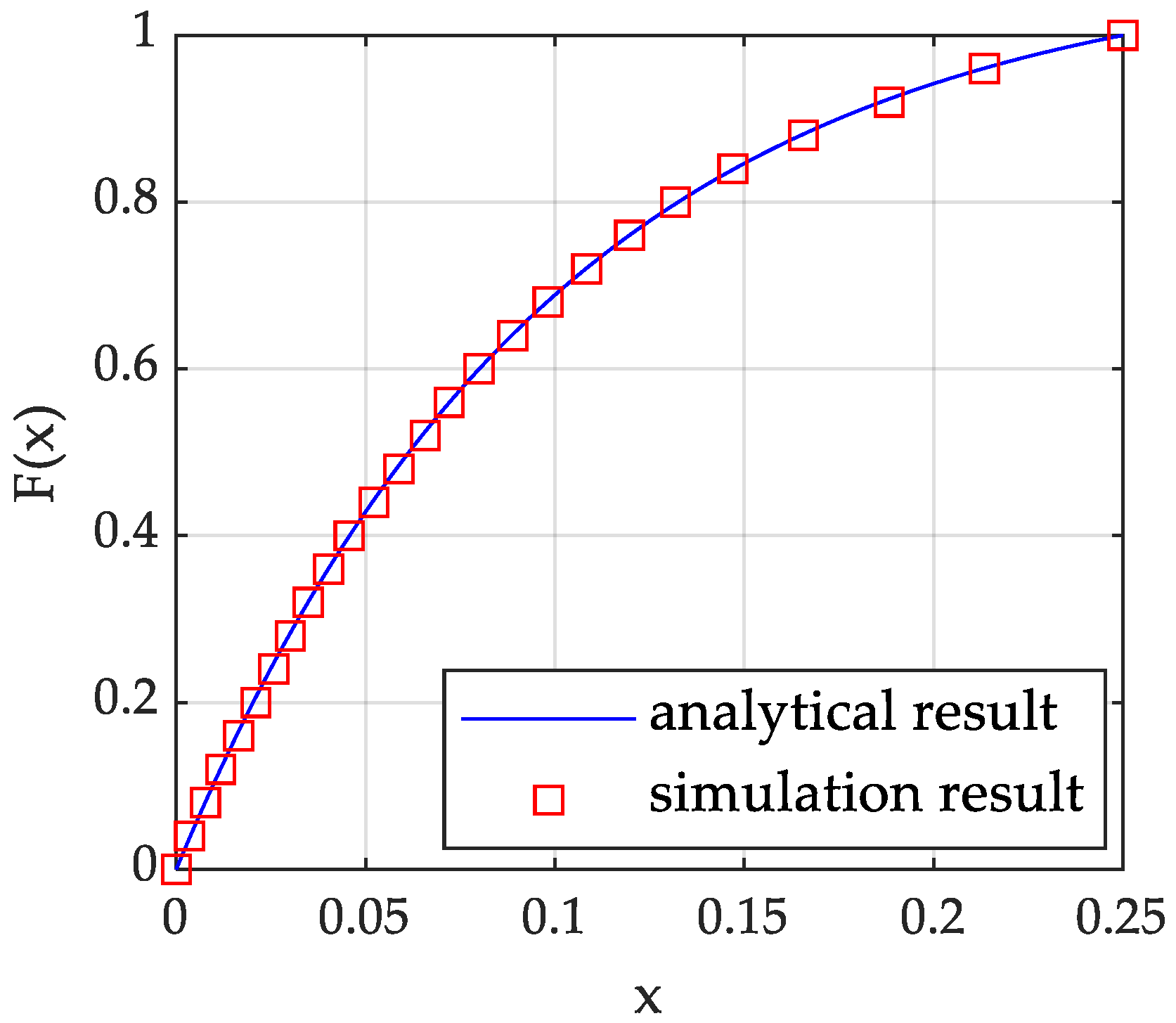
Considering that the RCS of each transceiver path can be modelled as a random variable subject to the Swerling I distribution, the RCS of five different transceiver paths is
, and their mean
is
, respectively. After the RCS is truncated, it still obeys the Swerling I distribution. Take
as an example. Let
be
x, the cumulative distribution function (CDF) be
, the probability density function (PDF) be
, and the truncation interval is
.
Figure 1 shows the comparison of theoretical and analog CDF values of
.
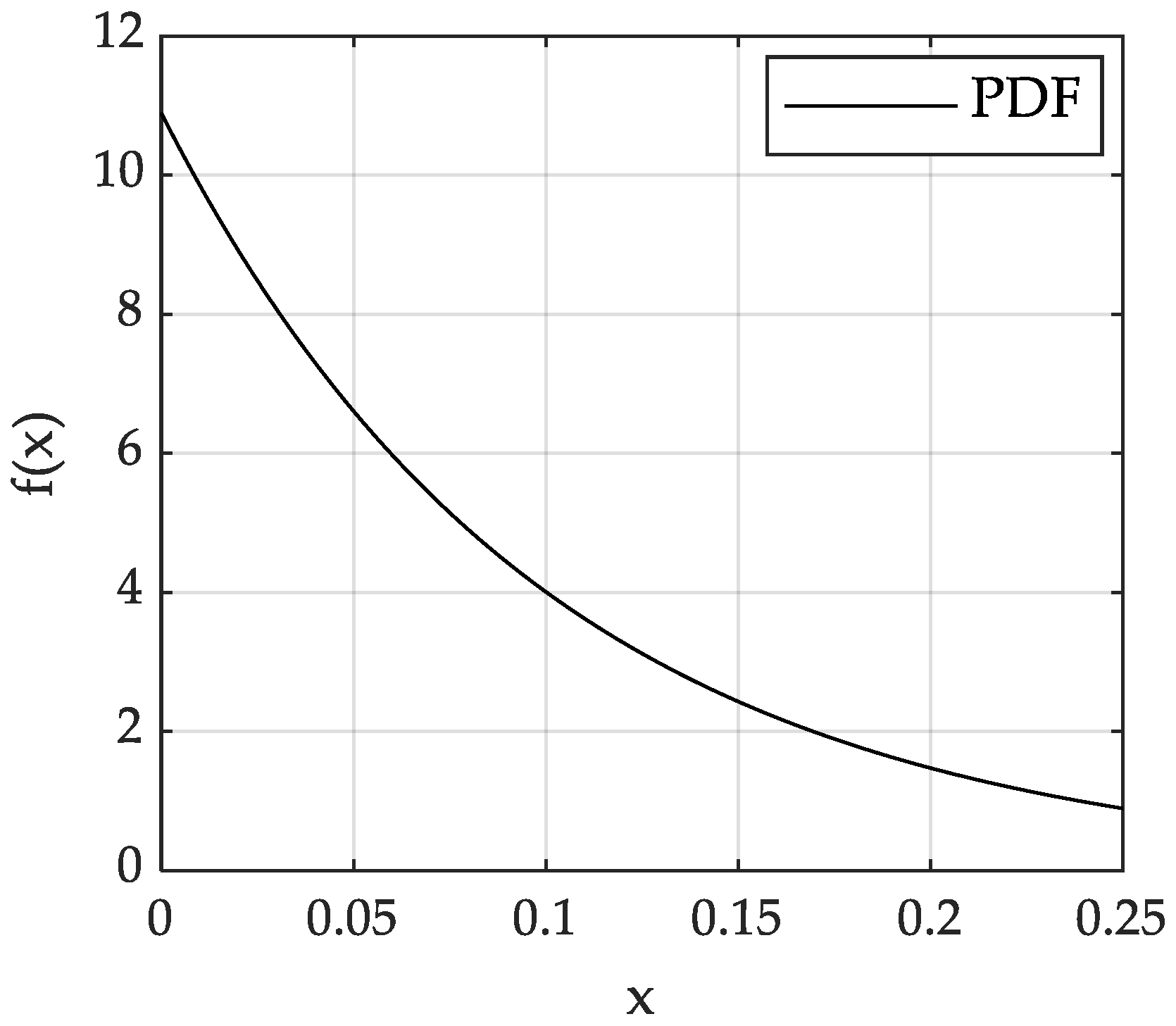
Figure 2 shows that the PDF form of
is still an exponential distribution. It can be seen that the theoretical and analog values are consistent.
6.1. Low Interception Performance of Radar Network
In order to verify the feasibility and effectiveness of the radar network target location based on low interception performance optimization, this section gives the relationship curve between the CRB (Equation (
28)) and the interception factor (Equation (
16)) under different radar network structures. According to Equation (
28),
is a function of the RCS random variable, so it is still a random variable. According to the probability theory, there are essential differences between the calculation methods of
with randomness and
with certainty. On the one hand, considering the complexity of Equation (
28), it is very difficult to calculate the probability density function of
. The use of digital features in practical applications is often better than the use of PDF [
34]. On the other hand, to obtain the digital features of
, it is theoretically necessary to know the specific form of its PDF, and the corresponding empirical PDF cannot be directly calculated in the simulation process. However, an empirical CDF can often be obtained directly during the simulation. Therefore, the method of calculating digital features using the CDF is given in
Appendix C.
Through observation, it is found that when the interception factor becomes larger in the linear coordinate system, the CRB value tends to zero at a faster rate. This feature makes the CRB values of different cases almost coincide, and it is not easy to distinguish the differences between them. Because of this, this paper intends to use a double logarithmic coordinate system to make the difference between CRB values more obvious in many cases to facilitate observation.
It can be seen from
Figure 3 that when the Schleher Interception Factor changes from
to
, the CRB also decreases. The reason is that when the Schleher Interception Factor increases, the system needs to transmit more power. According to Equation (
28), CRB will decrease with the increase of the system transmission power. In addition, it can be seen from
Figure 3 that under the same target tracking threshold, the Schleher Interception Factor decreases greatly with the increase in the number of transmitters and receivers in the netted radar system. Therefore, under the same target tracking performance, the increase in the number of radar nodes in the system can effectively improve the low interception performance of the radar network system.
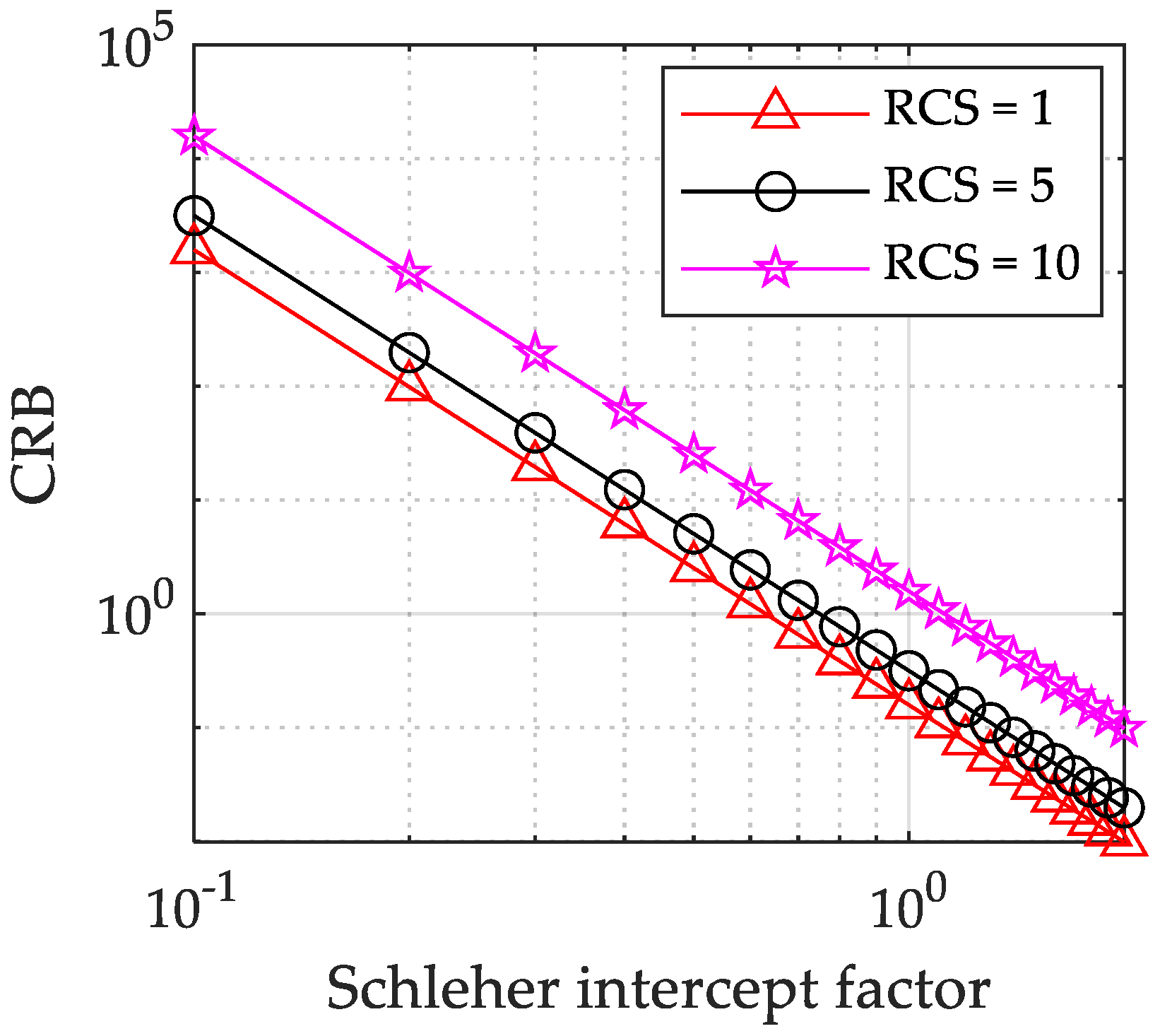
Figure 4 shows the relationship curve (
Radar network) between CRB and Schleher Interception Factor under different target RCS. As shown in
Figure 4, when the target RCS mean
increases from 1 m
to 10 m
, the CRLB decreases accordingly. The reason is that the radar network system is easier to locate targets with high scattering intensity in the target location process.
6.2. Aperture Assignment
As shown in
Figure 5, 784 antenna elements are scattered in the circle with radius 27
.
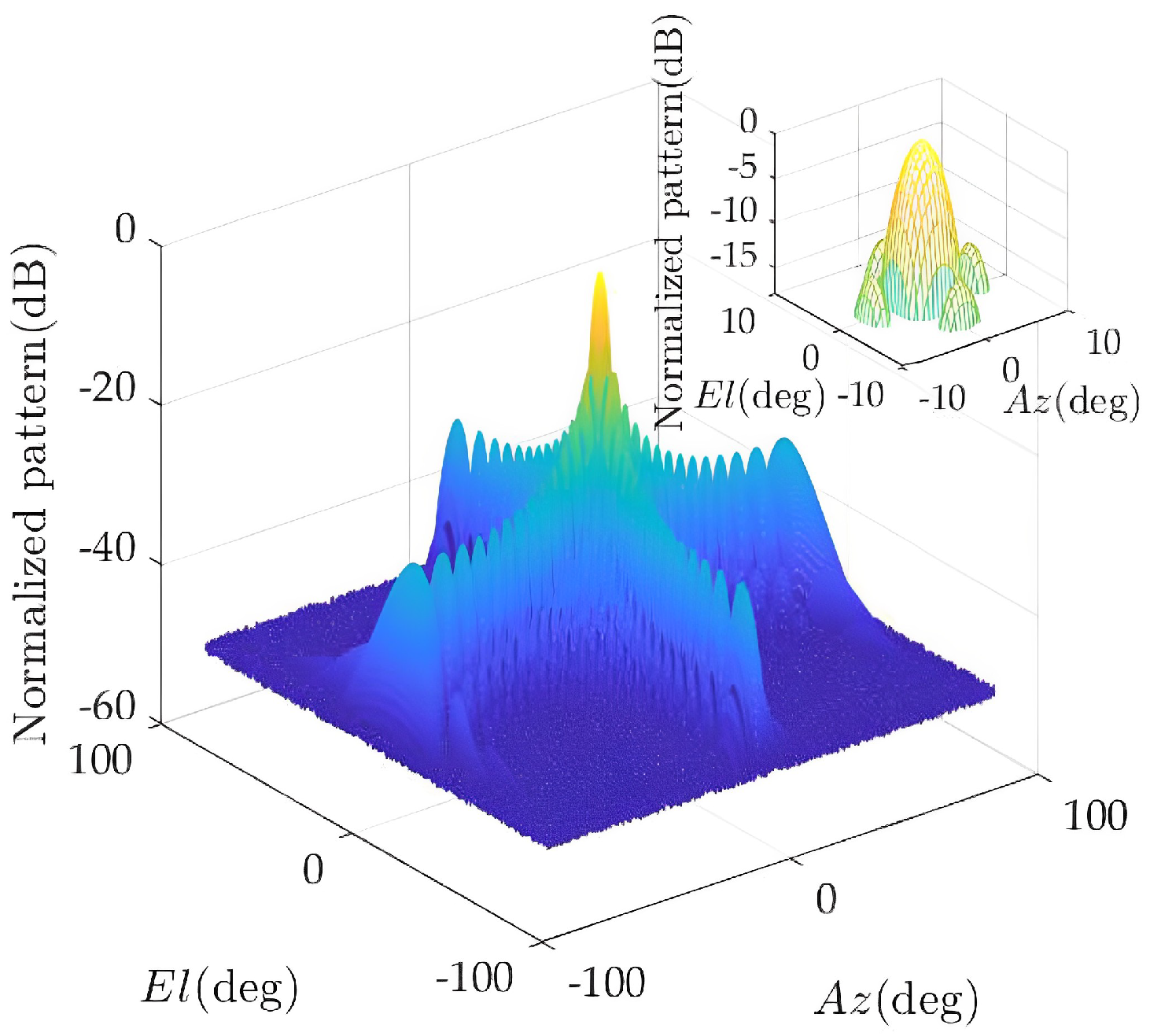
Figure 6 shows that when all elements are working, a pattern with a main lobe width of
and a peak side lobe level of −13.19 dB is generated. The minimum power of each array element is 0.001 (W), and the maximum power is 10 (W).
According to expert experience and some experimental data, the interval of the number of excitation elements is determined by the bell-shaped fuzzy random variable
, which is expressed as follows
where
,
.
refers to the normal distribution with mean
and variance
. The confidence level is
,
and
.
The hybrid intelligent algorithm is used to solve Equation (
20). The expected main lobe width is
, and the optimal solution is obtained when the normalized peak side lobe level is as small as possible.
The element distribution and composite pattern of the optimized solution are given below.
Figure 7 shows the element distribution of 504 elements.
Figure 8 shows the pattern synthesis results: the main lobe width is
, and the normalized peak side lobe level is −14.5 dB. Compared with the case where all antenna elements are working, the number of elements in a working state is greatly reduced under the constraint of ensuring the pattern performance.
6.3. Minimize Schleher Intercept Factor
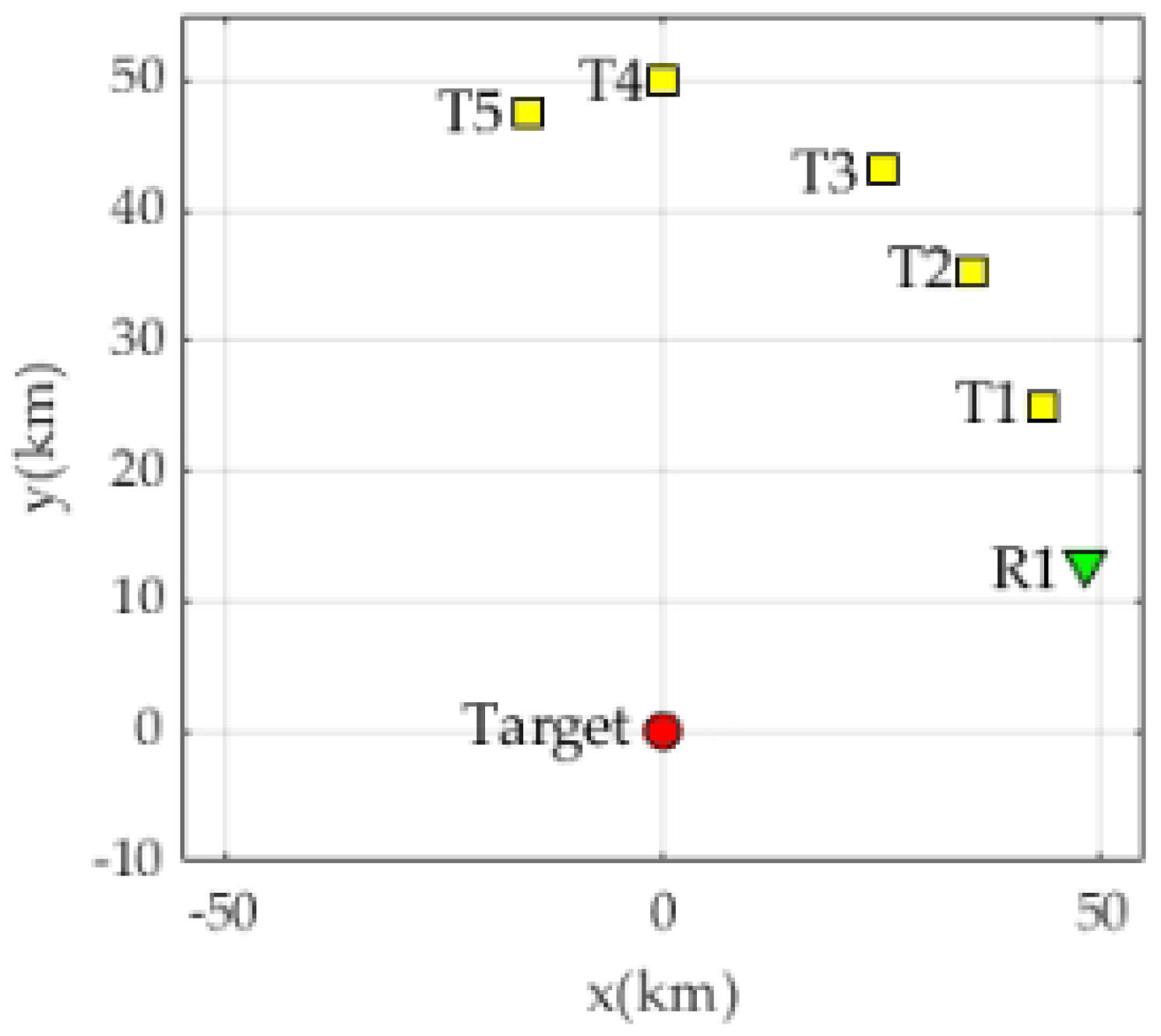
The simulation in this section adopts the distributed radar system layout
, as shown in
Figure 9. The distance between radar and target is equal, set as
.
Considering that the RCS of each transceiver path can be modelled as a random variable subject to the Swerling I distribution, the RCS of five different transceiver paths is
. In order to make the theoretical analysis results more consistent with the actual situation, the RCS distribution interval shall be properly truncated. The truncated RCS is shown in
Figure 10.
Given the MSE
of the target location for the case of uniform power distribution
, where
is
Define
to represent the total transmit power under the uniform distribution. According to Equation (
34),
is a function of the RCS random variable, so it is still a random variable. In
Appendix C, this paper gives a method to calculate digital features using the CDF in Equation (
34).
In order to analyze the impact of the JA scheme proposed in this paper on the performance of radar network LPI,
Table 2 compares the power performance of four power control algorithms under different confidence levels. The four algorithms are as follows: (1) the proposed algorithm, (2) the fixed power radar assignment (FPRA) algorithm, (3) the uniform power assignment (upa) algorithm, and (4) the adaptive noncooperative power control (ANCPC) algorithm [
35]. It can be seen from
Table 3 that at the same confidence level when the algorithm proposed in this paper is used for localization, the total power of the radar network to all targets is the least, which is far lower than that of the FPRA algorithm and the UPA algorithm. The ANCPC algorithm consumes more power than the algorithm proposed in this paper because each participant maximizes its utility function selfishly and rationally.
The layout shown in
Figure 9 eliminates the influence of radar range on power allocation results. According to the target prior information obtained from the collective awareness and situation sharing among radars, the hybrid intelligent algorithm and local optimal iterative algorithm are used to solve the CCP problem of Equation (
29). The power optimization results are compared with the uniform power allocation results. The system’s total power is
. The simulation results are shown in
Table 3.
In order to analyze the influence of different confidence levels on the distribution results, this paper sets the confidence levels
as 0.99, 0.95, 0.9, and 0.85, respectively.
represents the transmission power of each radar when it is evenly distributed under the same chance constraint.
is the expected value of uniform transmission power
.
is the optimal transmission power according to the power allocation algorithm given in
Section 5. The ratio of
reflects the advantage and disadvantages of optimal power compared with uniform power distribution;
is a low interception factor for optimal power allocation;
represents the power allocation of each transmitter during optimal allocation.
Table 2 shows that the algorithm in this paper can save roughly 50% of the power resources. The higher the confidence level, the fewer power resources saved, and the higher the low interception factor will be. Intuitively, when the total power consumed is more, the low interception factor is also greater, the probability of not meeting the constraint conditions is less, and the confidence level is higher. It can be seen from the allocation results that more power is allocated to Transmitters 2 and 4 because they have better RCS characteristics than Transmitters 1, 2 and 3.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}