
Development of an Interactive Touchless Technology Based on Static-Electricity-Induced Luminescence

Abstract
:1. Introduction
2. Methods
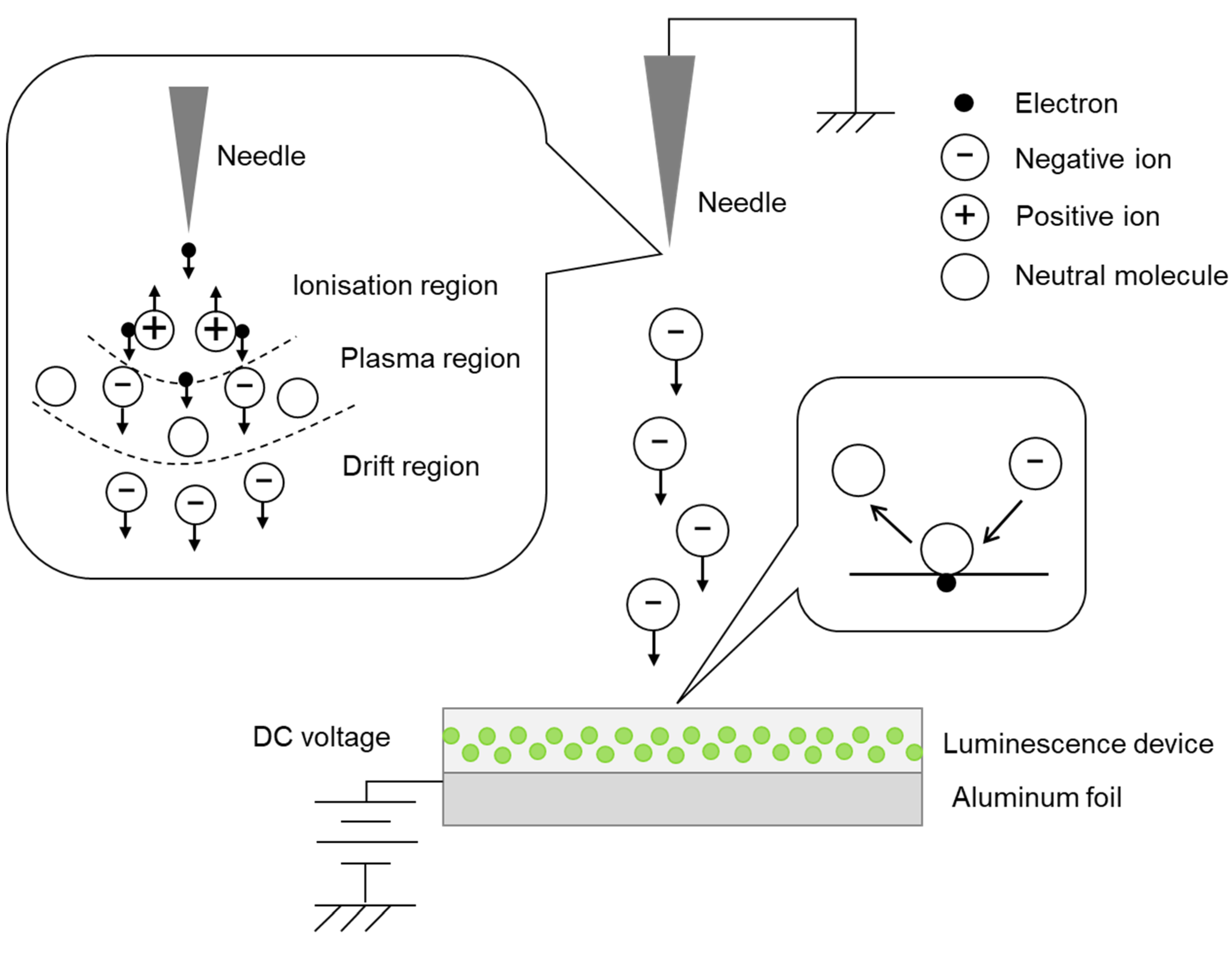
2.1. Luminescent Devices and Detection
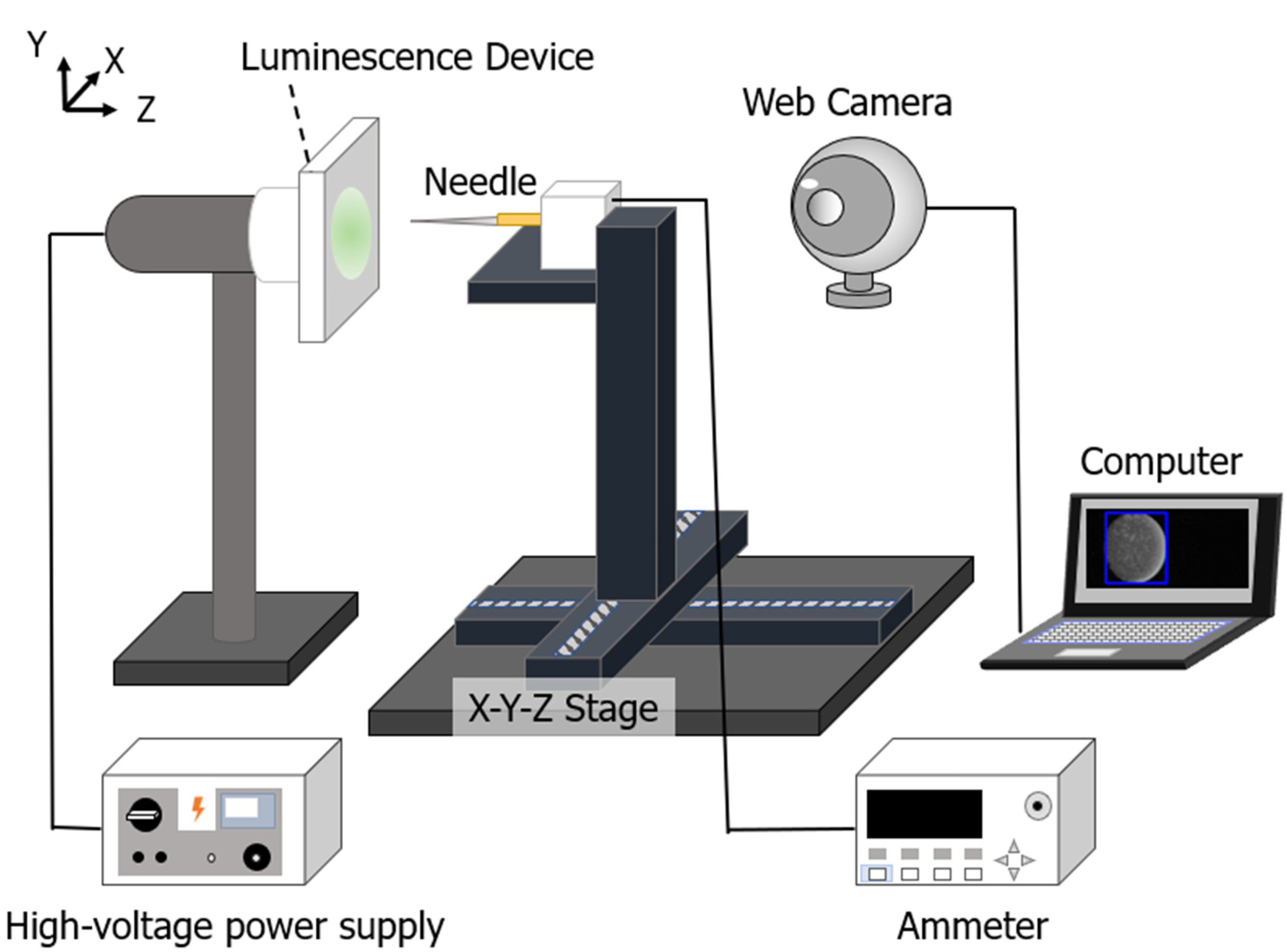
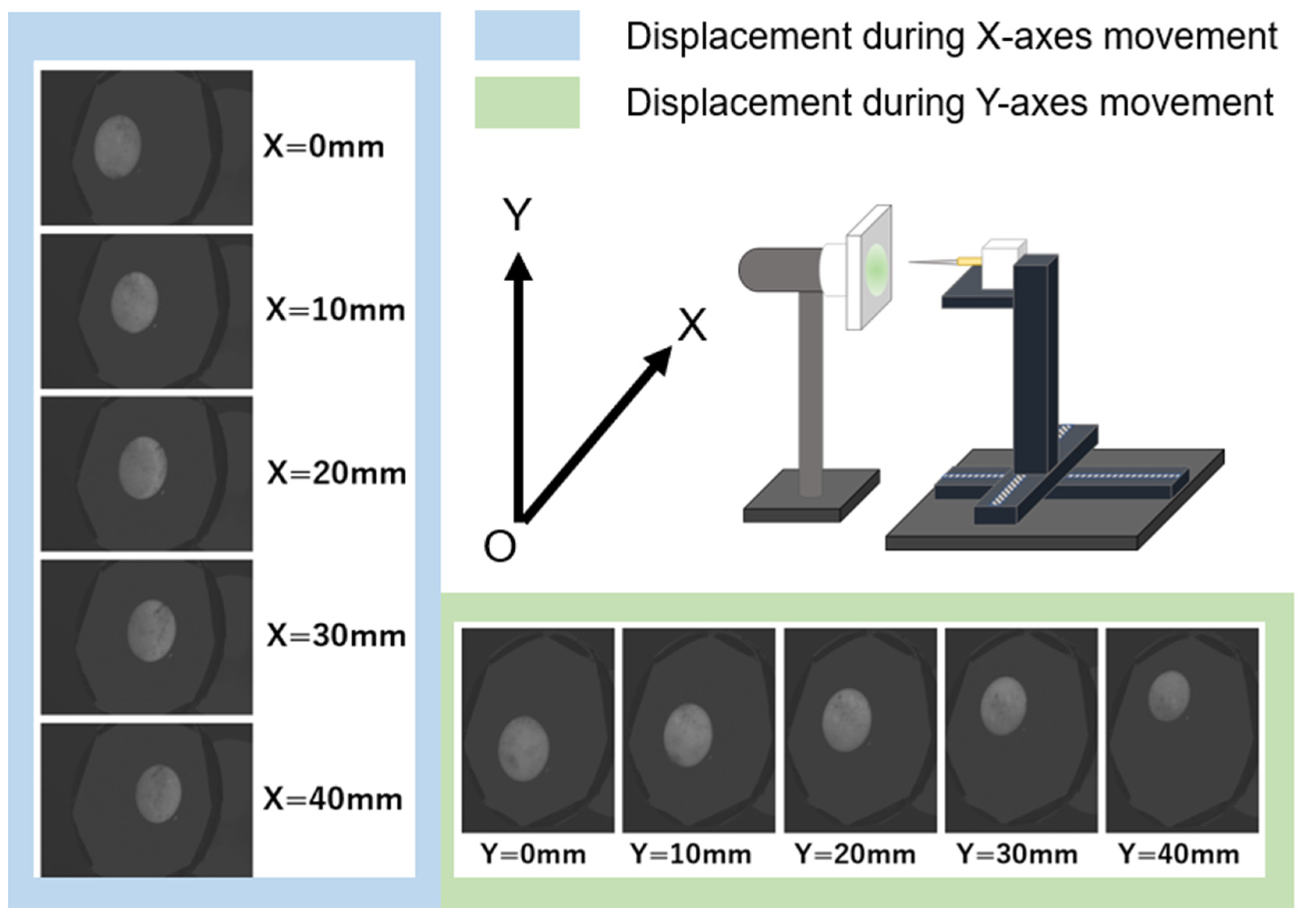
2.2. Setup for Evaluating the Luminescent Devices
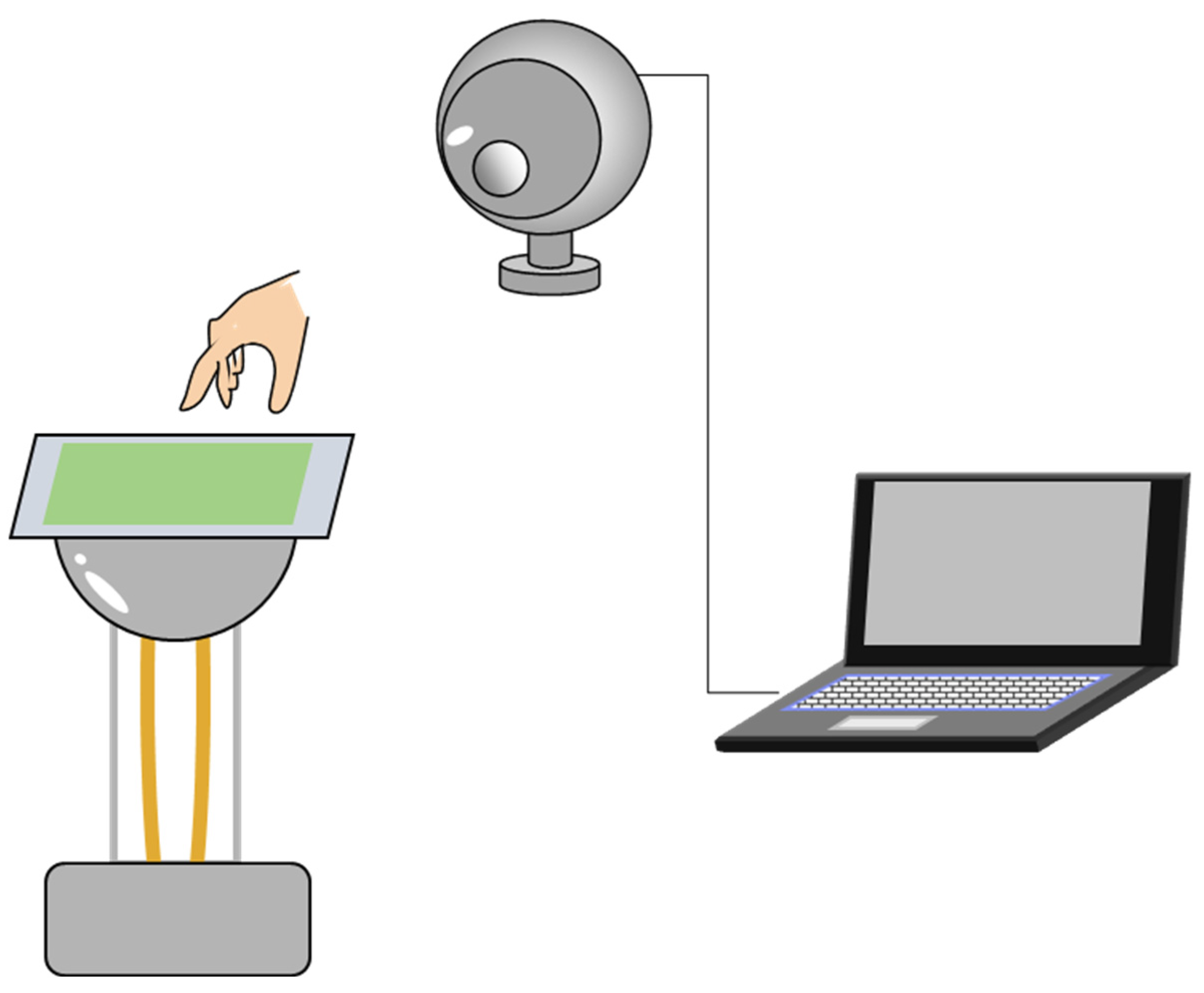
2.3. Setup for Touchless Verification
3. Results
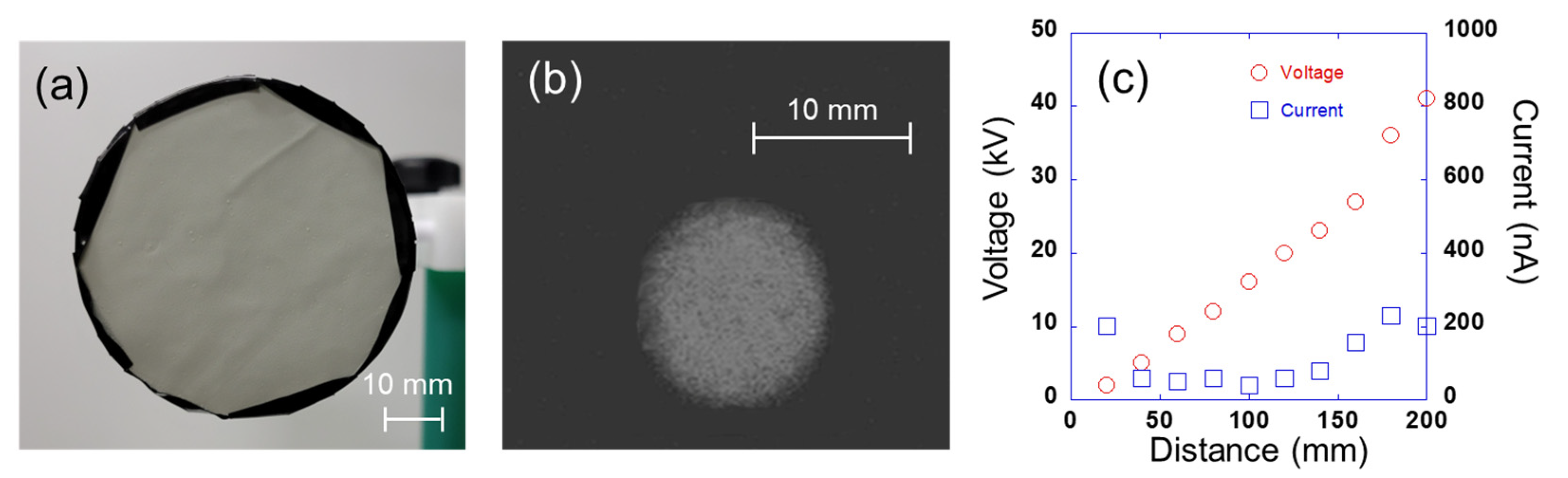
3.1. Relationship between Non-Contact Distance to Needle and Luminescence with Applied Voltage
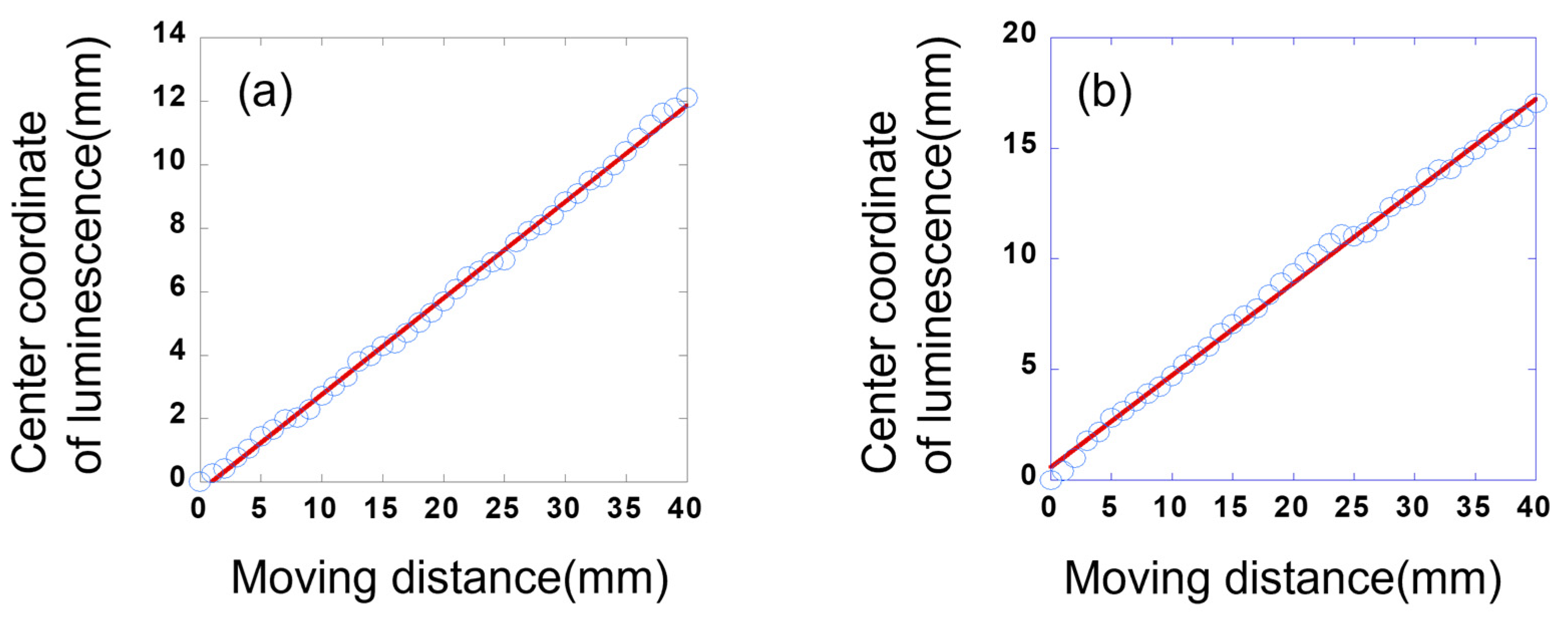
3.2. Evaluation of Luminescence Position-Detection Accuracy
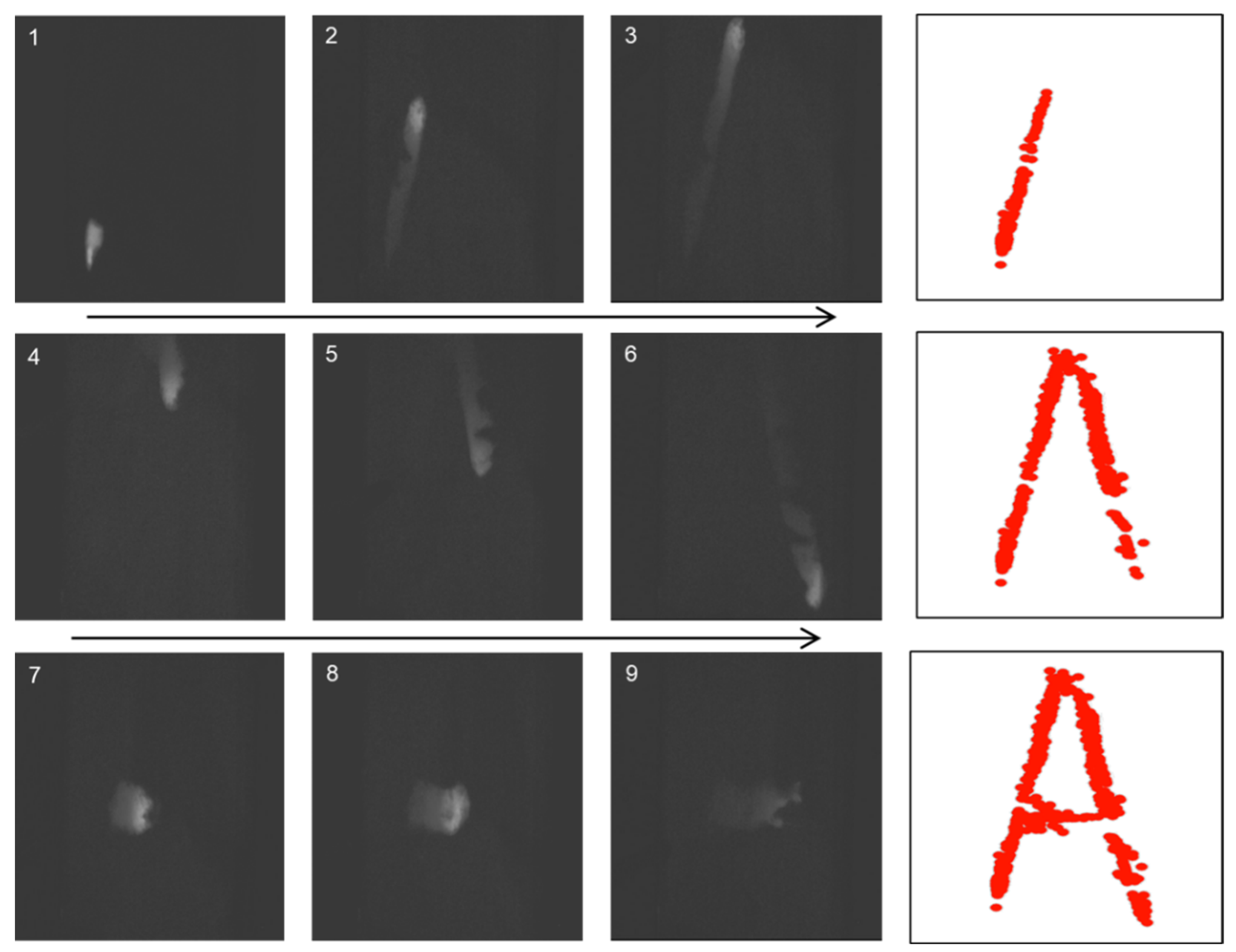
3.3. Demonstration of Touchless Technology Using the Fabricated Luminescent Devices
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kumari, M.; Lu, R.; Li, M.; Huang, J.; Hsu, F.; Ko, S.; Ke, F.; Su, S.; Liang, K.; Yuan, J.; et al. A critical overview of current progress for COVID-19: Development of vaccines, antiviral drugs, and therapeutic antibodies. J. Biomed. Sci. 2022, 29, 68. [Google Scholar] [CrossRef] [PubMed]
- Iqbal, M.Z.; Campbell, A. The emerging need for touchless interaction technologies. Interactions 2020, 27, 51–52. [Google Scholar] [CrossRef]
- Iqbal, M.Z.; Campbell, A.G. From luxury to necessity: Progress of touchless interaction technology. Sci. Technol. Soc. 2021, 67, 101796. [Google Scholar] [CrossRef] [PubMed]
- Vaish, S.K.; Dwivedi, A.K.D.; Dubey, D. Touchless controls for passenger elevator. In Proceedings of the 2020 International Conference on Power, Instrumentation, Control and Computing (PICC), Thrissur, India, 17–19 December 2020. [Google Scholar]
- Kepuska, V.; Bohouta, G. Next-generation of virtual personal assistants (microsoft cortana, apple siri, amazon alexa and google home). In Proceedings of the 2018 IEEE 8th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 8–10 January 2018. [Google Scholar]
- Bachmann, D.; Weichert, F.; Rinkenauer, G. Evaluation of the leap motion controller as a new contact-free pointing device. Sensors 2014, 15, 214–233. [Google Scholar] [CrossRef] [Green Version]
- Yamada, S.; Kakue, T.; Shimobaba, T.; Ito, T. Interactive holographic display based on finger gestures. Sci. Rep. 2018, 8, 2010. [Google Scholar] [CrossRef] [Green Version]
- Rekimoto, J. SmartSkin: An infrastructure for freehand manipulation on interactive surfaces. In Proceedings of the CHI ‘02:Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Minneapolis, MN, USA, 20–25 April 2002; pp. 113–120. [Google Scholar]
- Aezinia, F.; Wang, Y.; Bahreyni, B. Touchless capacitive sensor for hand gesture detection. In Proceedings of the Sensors, 2011 IEEE, Limerick, Ireland, 28–31 October 2011. [Google Scholar]
- Chuang, C.; Chuang, T.; Jau, P.; Chuang, F. Touchless positioning system using infrared LED sensors. In Proceedings of the 2014 IEEE International Conference on System Science and Engineering (ICSSE), Shanghai, China, 11–13 July 2014. [Google Scholar]
- Lee, M.; Lee, D.; Kim, D.; Ann, M.; Lee, J.; Lee, S.; Cho, J.; Shin, J.; Cha, J. A Study on Touchless Panel based Interactive Contents Service using IrDA Matrix. Int. J. Internet Broadcast. Commun. 2015, 7, 73–78. [Google Scholar]
- Chiu, T.; Deng, H.; Chang, S.; Luo, S. Implementation of ultrasonic touchless interactive panel using the polymer-based CMUT array. In Proceedings of the SENSORS, 2009 IEEE, Christchurch, New Zealand, 25–28 October 2009. [Google Scholar]
- Akagawa, D.; Takatsu, J.; Otsu, R.; Hayashi, S.; Vallet, B. Sustainable society with a touchless solution using UbiMouse under the pandemic of COVID-19. In ACM SIGGRAPH 2021 Emerging Technologies; Association for Computing Machinery: New York, NY, USA, 2021; pp. 1–4. [Google Scholar]
- Kikunaga, K.; Terasaki, N. Demonstration of static electricity induced luminescence. Sci. Rep. 2022, 12, 8524. [Google Scholar] [CrossRef]
- Xu, C.N.; Watanabe, T.; Akiyama, M.; Zheng, X.G. Direct view of stress distribution in solid by mechanoluminescence. Appl. Phys. Lett. 1999, 74, 2414–2416. [Google Scholar] [CrossRef]
- Dorenbos, P. Energy of the first 4f7 -> 4f6 5d transition of Eu2+ in inorganic compounds. J. Lumin. 2003, 104, 239–260. [Google Scholar] [CrossRef]
- Schwarz, M.W.; Cowan, W.B.; Beatty, J.C. An experimental comparison of RGB, YIQ, LAB, HSV, and opponent color models. ACM Trans. Graph. 1987, 6, 123–158. [Google Scholar] [CrossRef]
- Mohd Ali, N.; Md Rashid, N.K.A.; Mustafah, Y.M. Performance comparison between RGB and HSV color segmentations for road signs detection. Appl. Mech. Mater. 2013, 393, 550–555. [Google Scholar] [CrossRef]
- The OpenCV Reference Manual, OpenCV, 2.5.2. 2021. Available online: http://docs.opencv.org (accessed on 2 November 2022).
- Taylor, R. Interpretation of the correlation coefficient: A basic review. J. Diagn. Med. Sonogr. 1990, 6, 35–39. [Google Scholar] [CrossRef]
- Wang, C.; Chen, X.; Ouyang, J.; Li, T.; Fu, J. Pulse Current of Multi-Needle Negative Corona Discharge and Its Electromagnetic Radiation Characteristics. Energies 2018, 11, 3120. [Google Scholar] [CrossRef] [Green Version]
- Huang, Z.; Chen, B.; Ren, B.; Tu, D.; Wang, Z.; Wang, C.; Zheng, Y.; Li, X.; Wang, D.; Ren, Z.; et al. Smart Mechanoluminescent Phosphors: A Review of Strontium-Aluminate-Based Materials, Properties, and Their Advanced Application Technologies. Adv. Sci. 2023, 10, 2204925. [Google Scholar] [CrossRef]
- Liu, Y.; Xu, C.-N. Electroluminescent ceramics excited by low electrical field. Appl. Phys. Lett. 2004, 84, 5016–5018. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Wang, W.; Pan, J.; Ye, C. Alternating Current Electroluminescent Devices with Inorganic Phosphors for Deformable Displays. Cell Rep. Phys. Sci. 2020, 1, 100213. [Google Scholar] [CrossRef]
- Vij, D.R. Handbook of Electroluminescent Materials; IOP Publishing: Bristol, UK, 2004. [Google Scholar]
- Kitai, A. Luminescent Materials and Applications; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Piper, W.W.; Williams, F.E. Theory of electroluminescence. Phys. Rev. 1955, 98, 1809–1813. [Google Scholar] [CrossRef]
- Jayathilaka, W.; Chinnappan, A.; Tey, J.; Wei, J.; Ramakrishna, S. Alternative current electroluminescence and flexible light emitting devices. J. Mater. Chem. C 2019, 7, 5553–5572. [Google Scholar] [CrossRef]
- Yamada, H.; Fu, X.; Xu, C.N. The Electrochemical Society, find out more Enhancement of Adhesion and Triboluminescent Properties of SrAl2O4:Eu2+ Films Fabricated by RF Magnetron Sputtering and Postannealing Techniques. J. Electrochem. Soc. 2007, 154, J348–J351. [Google Scholar] [CrossRef]
- Clabau, F.; Rocquefelte, X.; Jobic, S.; Deniard, P.; Whangbo, M.H.; Garcia, A.; Le Mercier, T. Mechanism of phosphorescence appropriate for the long-lasting phosphors Eu2+-doped SrAl2O4 with codopants Dy3+ and B3+. Chem. Mater. 2005, 17, 3904–3912. [Google Scholar] [CrossRef]
- Dorenbos, P. Mechanism of persistent luminescence in Eu2+ and Dy3+ codoped aluminate and silicate compounds. J. Electrochem. Soc. 2005, 152, H107–H110. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Retrofit to Wall | Space Constraint | Non-Proximity Sensor | Positional Accuracy | Figure | |
|---|---|---|---|---|---|
| Camera (facing) | Bad | Good | Good | Good |  |
| Camera (upper) | Good | Bad | Good | Neutral |  |
| Ultrasonic | Bad | Good | Neutral | Neutral |  |
| Infrared sensor | Neutral | Good | Bad | Good |  |
| Touch panel | Good | Good | Bad | Good |  |
| X Coordinate (mm) | Y Coordinate (mm) | |
|---|---|---|
| (A) | 0.36 | 0.61 |
| (B) | 12.11 | 18.09 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abe, K.; Eguchi, T.; Oyama, T.; Fujio, Y.; Kikunaga, K. Development of an Interactive Touchless Technology Based on Static-Electricity-Induced Luminescence. Sensors 2023, 23, 2462. https://doi.org/10.3390/s23052462
Abe K, Eguchi T, Oyama T, Fujio Y, Kikunaga K. Development of an Interactive Touchless Technology Based on Static-Electricity-Induced Luminescence. Sensors. 2023; 23(5):2462. https://doi.org/10.3390/s23052462
Chicago/Turabian StyleAbe, Keina, Taiga Eguchi, Tatsuya Oyama, Yuki Fujio, and Kazuya Kikunaga. 2023. "Development of an Interactive Touchless Technology Based on Static-Electricity-Induced Luminescence" Sensors 23, no. 5: 2462. https://doi.org/10.3390/s23052462